电机控制器通信协议
伺服控制器的通信协议与数据传输方法
伺服控制器的通信协议与数据传输方法伺服控制器是一种用于控制电机的设备,它可以精确地控制电机的转速、位置和运动方向。
为了能够实现控制器与其他设备之间的数据传输与通信,采用适当的通信协议和数据传输方法是至关重要的。
在本文中,将介绍伺服控制器常用的通信协议和数据传输方法,以帮助读者更好地了解该领域的技术细节。
一、通信协议通信协议是指设备之间进行数据传输时所要遵循的规则和约定。
在伺服控制器中,常用的通信协议有以下几种:1. RS-485协议:RS-485是一种串行通信协议,它可以实现多个设备之间的数据传输,具有高速传输、抗干扰性强等特点。
RS-485协议常用于工业控制领域,特别适用于长距离传输和多设备的通信需求。
2. CAN协议:CAN是控制器局域网的简称,它是一种高可靠性、实时性强的通信协议。
CAN协议通常用于汽车电子控制系统和工业自动化领域,能够实现高速数据传输和多设备之间的实时通信。
3. Ethernet协议:Ethernet是一种常用的局域网通信协议,它基于TCP/IP协议,使用普通的网线进行数据传输。
Ethernet协议能够实现高速数据传输和远程访问控制器的功能,被广泛应用于工业自动化和物联网领域。
4. Modbus协议:Modbus是一种开放的串行通信协议,它常用于工业自动化领域。
Modbus协议简单、可靠,支持多设备之间的通信,并且可以在不同平台之间实现互联互通。
二、数据传输方法数据传输方法是指在通信协议的基础上,具体实现数据传输的方式和手段。
在伺服控制器中,常用的数据传输方法有以下几种:1. 串行通信:串行通信是指通过一个传输线将数据按照顺序一个一个地进行传输。
串行通信可以利用较少的传输线实现数据传输,但传输速率较低。
2. 并行通信:并行通信是指通过多条传输线同时传输数据,每一条传输线传输一个数据位。
并行通信可以实现高速数据传输,但需要较多的传输线。
3. TCP/IP通信:TCP/IP是一种基于互联网的通信协议,它可以实现远程访问控制器的功能。
eip协议 伺服电机

eip协议伺服电机EIP(Ethernet/IP)协议是一种基于以太网的工业自动化网络通信协议,它允许工业设备和控制系统之间进行实时数据交换和通信。
EIP协议是以太网协议的一种应用层协议,它提供了一种标准化的方法,使不同供应商的设备能够互相通信和协作。
EIP协议的特点之一是它的灵活性和可扩展性。
它支持多种通信方式,包括点对点通信、多播通信和广播通信。
这使得EIP协议可以适应不同的应用场景和网络拓扑结构,从简单的设备之间的通信到复杂的分布式控制系统。
EIP协议还提供了一套丰富的通信服务和功能,包括实时数据传输、事件通知、设备配置和诊断等。
它使用面向连接的通信方式,确保数据的可靠性和实时性。
同时,EIP协议还支持多种数据格式和编码方式,包括二进制数据、ASCII码和XML等,以满足不同设备和应用的需求。
伺服电机是一种特殊的电机,它通过反馈控制系统来实现精确的位置和速度控制。
伺服电机通常由电机本体、编码器、驱动器和控制器组成。
伺服电机在工业自动化领域广泛应用,特别是在需要高精度和高性能运动控制的场景中。
伺服电机的控制通常使用各种通信协议,其中EIP协议是一种常见的选择。
通过EIP协议,控制系统可以与伺服电机进行实时的数据交换和通信,实现对电机的位置、速度和力矩等参数的精确控制。
同时,EIP协议还提供了诊断和监控功能,可以帮助用户实时监测电机的状态和性能。
总结而言,EIP协议是一种基于以太网的工业自动化网络通信协议,它具有灵活性、可扩展性和丰富的通信服务和功能。
伺服电机是一种通过反馈控制实现精确控制的电机,在工业自动化中常使用EIP协议进行通信和控制。
整车控制器和电机控制器通讯协议

秘级:内部纯电动汽车动力总成系统网络总线通讯协议五、通信协议整车控制器#1:PVCU1 (ID:0x1000EFD0)整车控制器#2:PVCU2 转发电机1报文1MCU_TrqSpd (VCU 发送)变速器发送频率:1000ms数据长度:8字节数据页数:0协议数据单元格式:协议数据单元特性:默认优先级: 6参数组号:0xff4B SA:0xEFID:0x18ff4BEF5-6 母线电压7-8 母线电流整车控制器#3:PVCU3 转发电机报文MCU_Temp (VCU 发送)变速器发送频率:1000ms数据长度:8字节数据页数:0协议数据单元格式:协议数据单元特性:默认优先级: 6参数组号:0xff4c SA:0xEFID:0x18ff4CEF字节: 1 M_Motor_Temperature1 主电机温度比例1 偏移-402 控制器温度3 主逆变器温度:比例1 偏移-40 IGBT温度4 故障代码5故障代码:" 1 超速报警代码"" 3 欠压报警"" 4 过压报警"" 5 A相IGBT1报警"" 6 B相IGBT3报警"" 7 C相IGBT5报警"" 8 A相硬件过流保护"" 9 B相硬件过流保护"" 10 正常"" 12 过电流报警"" 15 旋变错误报警"" 17 A相电流传感器零票故障"" 18 B相电流传感器零票故障"" 26 IGBT温度传感器开路"" 27 温度传感器开路"" 28 箱体温度传感器开路"" 29 电机温度传感器开路"" 30 IGBT温度传感器短路"" 31 温度传感器短路"" 32 箱体温度传感器短路"" 33 电机温度传感器短路"" 34 IGBT1过温"" 36 箱体过温"" 37 电机过温"整车控制器#4:PVCU4(ID:0x18fff5D0)没有用??BMSCmd:bit0:1预充命令bit1:1正极接触器闭合bit2:1 负极接触器闭合(需要提供高压电路图来确定逻辑)BMS2:ID:0x0x14 22 D0 D2字节: 3 最大允许放电电流单位增益:2A/bit 范围:0-500A/0-FAh4 最大允许充电电流单位增益:2A/bit 范围:0-500A/0-FAh5 SOC6 母线电压7 母线电流2、VCU-MC网络2.1VCU发送报文2.1 .1Current 、power、Pad发送频率:10ms数据长度:8字节数据页数:0协议数据单元格式:协议数据单元特性:默认优先级:0参数组号:ID:0x1000EFD0字节: 1 电机控制模式命令bit4:整车请求电机使能bit7:转矩模式bit8:调速模式23-4 驱动电机目标转矩5-6 驱动电机目标转速782.1 .2 Pad/IO 内部检测用VCU发送频率:收到标定报文后发送1000ms数据长度:8字节数据页数:0协议数据单元格式:协议数据单元特性:默认优先级:0参数组号:ID:0x0CF106D0字节: 1 加速踏板1AD2 加速踏板2AD3制动踏板1AD4 制动踏板2AD5:bit1:N档bit2:D档bit4:R档bit5:制动有效bit6:加速有效Bit7:KeyOn(没用)6Bit1-3: HU85St0 off;1 on;2 OpenLoad;3 OverLoad;Bit4-6: ACCPowerSt0 off;1 on;2 OpenLoad;3 OverLoad;7-8VCU发送频率:收到标定报文后发送1000ms数据长度:4字节数据页数:0协议数据单元格式:协议数据单元特性:默认优先级:0参数组号:ID:0x0CF107D0字节:1-2 EPROM值地址3-4 EPROM存储的值发送频率:500ms数据长度:8字节数据页数:0协议数据单元格式:协议数据单元特性:默认优先级: 6参数组号:0xff4A SA:0xEFID:0x18ff4AEF字节:1-2 NOP3 位1NOP5-2 Main mode Motor statusBit1:ReadyBit4 err7-6 Pre_Charge0:close1:open2:无效3:无效4 NOP5 NOP6 NOP78 MC_Err故障代码:" 1 超速报警代码"" 3 欠压报警"" 4 过压报警"" 5 A相IGBT1报警"" 6 B相IGBT3报警"" 7 C相IGBT5报警"" 8 A相硬件过流保护"" 9 B相硬件过流保护"" 10 正常"" 12 过电流报警"" 15 旋变错误报警"" 17 A相电流传感器零票故障"" 18 B相电流传感器零票故障"" 26 IGBT温度传感器开路"" 27 温度传感器开路"" 28 箱体温度传感器开路"" 29 电机温度传感器开路"" 30 IGBT温度传感器短路"" 31 温度传感器短路"" 32 箱体温度传感器短路"" 33 电机温度传感器短路"" 34 IGBT1过温"" 36 箱体过温"" 37 电机过温"发送频率:500ms数据长度:8字节数据页数:0协议数据单元格式:协议数据单元特性:默认优先级: 6参数组号:0xff4B SA:0xEFID:0x18ff4BEF字节:1-2 M_Torque1 主电机实际转矩比例1 偏移-320003-4 M_Speed 电机实际转速比例1 偏移-320005-6 M_DC_Voltage1 电机直流电压比例因子1 偏移0 new7 M_Motor_Temperature1 主电机温度比例1 偏移-408 主逆变器温度:比例1 偏移-40发送频率:500ms数据长度:8字节数据页数:0协议数据单元格式:协议数据单元特性:默认优先级: 6参数组号:0xff4c SA:0xEFID:0x18ff4CEF字节:1-2 位13-1 M_DC_Voltage1 电机直流电压比例因子1 偏移0 3-4 位13-1 M_DC_Current 电机直流电流比例1 偏移-400 (无)562.3 标定报文内部用发送频率:100ms数据长度:1字节数据页数:0协议数据单元格式:协议数据单元特性:默认优先级:0参数组号:ID: 0x1800d029字节: 1 Bit1:标定当前ACCPad的AD值为MAXBit2:标定当前ACCPad的AD值为MinBit3:标定当前BreakPad的AD值为MAXBit4:标定当前BreakPad的AD值为MinBit7:写EPROM信息Bit8:读取EPROM储存的值2-3 读取/写入EPROM值的地址(仅仅用到了byte2)4-5 写入数据7-8 Nop线束护套1393450-1(52pin插孔)、1393454-6(52pin插孔护板)、1393436-1(28pin插孔)、1393454-1(28pin 插孔护板)2。
电机总线协议

电机总线协议引言电机总线协议是一种用于控制和通信的协议,用于在电机控制系统中实现可靠和高效的数据传输。
本文档将介绍电机总线协议的基本概念、应用场景和技术细节。
概述电机总线协议是一种在电机控制系统中使用的通信协议,用于在控制器和电机之间传输指令、数据和状态信息。
通过使用电机总线协议,可以实现集中控制、实时监测和故障诊断等功能,提高电机控制系统的可靠性和性能。
应用场景电机总线协议广泛应用于工业自动化、机械运动控制、机器人领域等。
一些常见的应用场景包括:•机床和自动化生产线控制系统:电机总线协议可以用于控制多个电机的速度、位置和力矩,实现工件的精确加工和定位。
•机器人控制系统:通过电机总线协议,可以实现机器人的精密运动控制和人机交互,提高机器人的自主性和灵活性。
•物流和仓储系统:电机总线协议可以用于控制输送带、起重机和堆垛机等设备,实现物品的自动分拣、装卸和储存。
技术细节基本通信原理电机总线协议通过在控制器和电机之间建立通信链路,实现数据的传输和交换。
通信链路可以基于串行通信协议(如RS485、CAN等)或以太网等网络通信协议实现。
数据帧格式电机总线协议采用数据帧的形式进行通信。
每个数据帧包括以下几个部分:•帧头:用于标识该帧的起始,通常包含一个固定的字节或字节序列。
•地址:用于标识发送方或接收方的地址,以指定通信的对象。
•控制字:包含一些控制信息,如数据长度、校验方式等。
•数据:包含实际的数据内容。
•校验和:用于校验数据的完整性,以确保数据的准确传输。
•帧尾:用于标识该帧的结束,通常包含一个固定的字节或字节序列。
控制命令和数据类型电机总线协议定义了一系列控制命令和数据类型,用于控制电机的运动和获取状态信息。
常见的控制命令包括启动、停止、加速、减速等,常见的数据类型包括速度、位置、力矩等。
运动控制和状态监测通过使用电机总线协议,可以实现精密的运动控制和实时的状态监测。
控制器可以发送控制命令和参数给电机,以控制其运动轨迹。
电机控制器技术协议参考样板
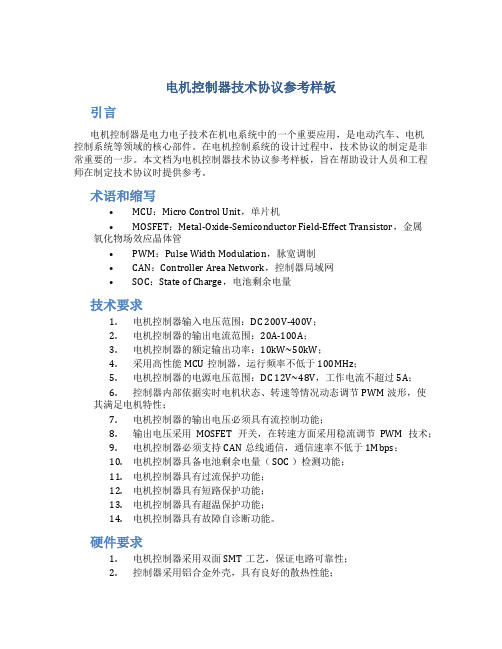
电机控制器技术协议参考样板引言电机控制器是电力电子技术在机电系统中的一个重要应用,是电动汽车、电机控制系统等领域的核心部件。
在电机控制系统的设计过程中,技术协议的制定是非常重要的一步。
本文档为电机控制器技术协议参考样板,旨在帮助设计人员和工程师在制定技术协议时提供参考。
术语和缩写•MCU:Micro Control Unit,单片机•MOSFET:Metal-Oxide-Semiconductor Field-Effect Transistor,金属氧化物场效应晶体管•PWM:Pulse Width Modulation,脉宽调制•CAN:Controller Area Network,控制器局域网•SOC:State of Charge,电池剩余电量技术要求1.电机控制器输入电压范围:DC 200V-400V;2.电机控制器的输出电流范围:20A-100A;3.电机控制器的额定输出功率:10kW~50kW;4.采用高性能MCU控制器,运行频率不低于100MHz;5.电机控制器的电源电压范围:DC 12V~48V,工作电流不超过5A;6.控制器内部依据实时电机状态、转速等情况动态调节PWM波形,使其满足电机特性;7.电机控制器的输出电压必须具有流控制功能;8.输出电压采用MOSFET开关,在转速方面采用稳流调节PWM技术;9.电机控制器必须支持CAN总线通信,通信速率不低于1Mbps;10.电机控制器具备电池剩余电量( SOC )检测功能;11.电机控制器具有过流保护功能;12.电机控制器具有短路保护功能;13.电机控制器具有超温保护功能;14.电机控制器具有故障自诊断功能。
硬件要求1.电机控制器采用双面SMT工艺,保证电路可靠性;2.控制器采用铝合金外壳,具有良好的散热性能;软件要求1.控制器上需搭载操作系统,驱动程序、中间件和应用程序等;2.操作系统必须依据保密性要求进行配置;3.软件开发过程需严格遵循工业标准,确保软件质量。
伺服电机modbus 485控制案例
伺服电机modbus 485控制案例摘要:1.伺服电机简介2.Modbus协议介绍3.Modbus 485控制原理4.伺服电机Modbus 485控制案例分析5.总结与展望正文:伺服电机是一种可以精确控制转速和转矩的电机,广泛应用于工业自动化领域。
Modbus协议是一种通信协议,常用于工业控制和自动化系统中。
本文将介绍伺服电机Modbus 485控制案例。
首先,让我们了解一下伺服电机。
伺服电机是一种可以精确控制转速和转矩的电机,其特点是转速稳定、精度高。
它主要由转子、定子和控制器组成。
在工业自动化领域,伺服电机常用于定位、控制和执行任务。
其次,介绍一下Modbus协议。
Modbus协议是一种通信协议,常用于工业控制和自动化系统中。
它有多种传输方式,如串行通信、以太网通信等。
Modbus 485是一种串行通信方式,它具有传输距离远、抗干扰能力强等优点。
接着,我们来了解一下Modbus 485控制原理。
在Modbus 485系统中,主设备通过485总线发送命令和数据,从设备接收命令和数据。
主设备通过Modbus地址分配给从设备唯一的地址,实现数据通信。
在伺服电机控制中,主设备通常为上位机,从设备为伺服电机驱动器。
上位机通过Modbus 485总线发送控制命令,驱动器接收命令并控制伺服电机的转速和转矩。
最后,我们通过一个案例来分析伺服电机Modbus 485控制。
假设有一个上位机监控系统,需要通过Modbus 485控制一个伺服电机的转速和位置。
首先,上位机通过Modbus 485总线给伺服电机驱动器分配地址,并设置相关参数。
然后,上位机发送指令,如启动、停止、正转、反转等,驱动器接收指令并控制伺服电机的转速和转矩。
最后,上位机通过Modbus 485总线读取伺服电机的实时状态,如转速、位置等。
总之,伺服电机Modbus 485控制案例通过Modbus协议实现了上位机与伺服电机驱动器之间的通信,从而实现了对伺服电机的精确控制。
melsec通信协议参考手册

一、介绍MELSEC通信协议是三菱电机公司生产的PLC(可编程逻辑控制器)产品与外部设备进行通信的标准协议。
通过MELSEC通信协议,用户可以实现PLC与上位机、触摸屏、人机界面等设备之间的数据交换与通信。
本手册旨在向用户介绍MELSEC通信协议的相关内容,帮助用户了解如何利用该协议实现设备之间的数据传输与通信。
二、MELSEC通信协议的基本原理1. MELSEC通信协议是基于RS-232、RS-422、RS-485等串行通信协议的基础上进行扩展和优化而成的。
2. MELSEC通信协议采用应用层协议实现数据的传输与交换,可以实现双向数据通信。
3. MELSEC通信协议支持多种数据格式和传输模式,可以满足不同场景下的通信需求。
三、MELSEC通信协议的应用范围1. MELSEC通信协议主要应用于工业自动化领域,用于工业设备之间、工业设备与上位机之间、工业设备与人机界面之间的数据通信与交换。
2. MELSEC通信协议还可以用于楼宇自动化、能源监控、智能交通等领域,满足不同行业的通信需求。
1. MELSEC通信协议具有高效性,可以实现快速的数据传输与交换。
2. MELSEC通信协议具有稳定性,能够在复杂环境下保持良好的通信质量。
3. MELSEC通信协议具有灵活性,支持多种数据格式和传输模式的配置。
五、MELSEC通信协议的接口规范1. MELSEC通信协议的串口通信接口遵循标准的RS-232、RS-422、RS-485接口规范,用户可根据具体的通信需求选择合适的接口类型。
2. MELSEC通信协议还支持以太网接口,满足网络化通信的需求。
六、MELSEC通信协议的配置与使用1. 用户在应用MELSEC通信协议时,需要首先配置通信参数,包括波特率、数据位、停止位、校验位等。
2. 配置完成后,用户可以通过编写PLC程序或上位机软件实现数据的发送与接收,实现设备之间的数据通信。
七、MELSEC通信协议的开发框架1. 在应用MELSEC通信协议时,用户可以使用三菱公司提供的通信库或协议栈,也可以基于MELSEC通信协议进行二次开发,实现定制化的通信方案。
电机控制器通信协议

电机控制器通信协议
1协议概述
1.1 协议规范:
CAN总线系统执行CAN2.0B技术规范,物理层应符合SAE J1939-11:2006中的相关规定,总线通信速率:250kbit/s。
使用CAN扩展帧29位标识符,格式定义应符合SAE J1939-21:2006中的相关规定。
多字节数据发送时,低字节先发,高字节后发。
29位标识符由优先级P(0~7)、保留位R(=0)、数据页DP(=0)、PDU格式PF、PDU特定格式PS及源地址SA七部分组成,协议数据单元(PDU)格式如下:
1.2 CAN 总线网络组成
CAN0
CAN4
1.3 CAN总线各节点地址分配
1.4 数据格式定义
注:电压,电流,温度,SOC 能量等部分参数数据格式的定义参考GB/T 27930~2015 2电机控制器通信协议
2.1 报文信息
2.2 报文解析
0x08C1EF21
500转100牛扭矩模式前进挡08 52 64 00 02 01 00 00
CAN通讯地址对应表。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
电机控制器通信协议
1协议概述
1.1 协议规范:
CAN总线系统执行CAN2.0B技术规范,物理层应符合SAE J1939-11:2006中的相关规定,总线通信速率:250kbit/s。
使用CAN扩展帧29位标识符,格式定义应符合SAE J1939-21:2006中的相关规定。
多字节数据发送时,低字节先发,高字节后发。
29位标识符由优先级P(0~7)、保留位R(=0)、数据页DP(=0)、PDU格式PF、PDU特定格式PS及源地址SA七部分组成,协议数据单元(PDU)格式如下:
1.2 CAN 总线网络组成
CAN0
CAN4
1.3 CAN总线各节点地址分配
1.4 数据格式定义
注:电压,电流,温度,SOC 能量等部分参数数据格式的定义参考GB/T 27930~2015 2电机控制器通信协议
2.1 报文信息
2.2 报文解析
0x08C1EF21
500转100牛扭矩模式前进挡08 52 64 00 02 01 00 00
CAN通讯地址对应表。