GPS方位角系统转换及其精度的探讨
GPS坐标成果空间坐标系转换及精度分析

的程序转换为 8 4坐标 系下 4平面坐标根 据转换模 型转换成 B —5 J 4坐标 系下 的平 面坐标 , 再用转换得到 的 5 4平面坐标与 已知 的 5 4
平 面坐 标 进 行 比较 得 出精 度 , 即可进 行 精 度分 析 。
ZHOU W e n— bn Z i , HU De— h o a
( .HabnIs tt o o c nc I vs gt na d S r eig Ha bn10 1 , hn ; 1 r i ntue f t h  ̄ n et a o n u vyn , r i 5 0 0 C ia i Gee i i i
wG 一8 s 4空间直 角坐标 系, 而有 时我们要使 用的 坐标为 高斯平 面直角坐标 。因此需要把 G S测量成果通过 一定 P
的转换模 型转换 为 高斯平面直 角坐标 , 本文就此 内容进行 分析探 讨 。
关键词 : 转换 ; 参数 ; 型 ; 模 坐标 系; 坐标成果
中图分类号 :2 84 P 2 . 文献标识码 : B 文章 编号 :6 2— 87 2 0 ) 3 0 4 0 17 56 (0 7 0 — 17— 3
GP S坐 标 成 果 空 间坐 标 系转 换 及 精 度分 析
周 文彬 ,朱德好
(. 1 哈尔滨市勘察测绘研 究院 , 黑龙江 哈尔 滨 10 1 2 山东省招远市规划 管理 处 , 50 0;. 山东 招远 2 50 ) 6 4 0
摘
要: 随着科学技术 和数 字化 技 术 的发展 , P G S越 来越 多的应 用 于各 种测 量 。G S测 量所 获 得 的成 果属 于 P
Th p ta o d n t y t m a so m a i n a d Ac ur c e S a ilCo r i a e S se Tr n f r to n c a y An l ssf r GPS Co r i t s ls ay i o o d na e Re u t
关于提高GPS RTK施测精度的探讨
关于提高GPS RTK施测精度的探讨文中探讨了关于影响GPS RTK测量精度的几个因素,并将影响RTK精度的因素进行了分析并提出了相应的应对措施,为各测量作业单位进行GPS RTK测量提供了依据。
关健词:GPS RTK;基准站;流动站一、概述随着我国测量技术的不断发展,GPS以其快捷、方便、高效率、高精度等优点,已被广大测量工作者所接受,而其应用领域也在逐渐的扩大。
通常来说一般的GPS测量可分为静态测量和动态测量两种模式。
GPS常规静态测量模式主要是用于建立大地控制网,快速静态方式主要用于工程测量、地形测量、地籍测量的控制网的建立及加密,随着GPS准动态、动态技术的出现,特别是随着RTK (Real Time Kinematic)实时动态技术的应用,给传统的测量技术带来了革命性的变化,它以精度好、工效高、布网灵活、即测即得等多项优点越来越受到用户的注目。
实时动态(RTK)测量系统,是GPS测量技术与数据传输技术的结合,是GPS 测量技术中的一个新突破。
GPS实时动态相对定位RTK技术,现已广泛应用于城市工程测量、土地测量和航空摄影测量等领域,由于其能实时提供待定点的坐标,较静态定位方式给测量带来了很大的便利。
本文以我公司Ashtech Z-12的实际应用为例,对影响GPS RTK施测精度的因素及实际操作中应注意的问题作一简单介绍。
二、GPS RTK实时动态测量的基本原理GPS RTK动态定位是以载波相位测量为根据的实时差分GPS测量。
它要求基准站GPS接收机通过数据链实时把观测数据及已知数据传输给流动站GPS接收机,流动站快速求解整周模糊度并在机处理,在同时观测到四颗或以上卫星时,实时求解出厘米级的流动站平面位置。
三、影响GPS RTK施测精度的因素⒈转换参数的影响众所周知,GPS采用的是WGS-84坐标系统,而我们在日常测量中一般都采用的是54北京坐标系或地方独立坐标系,由于它们所对应的空间直角坐标是不同的,所以GPS RTK测量时必须先求转换参数,以便将WGS-84坐标转换到地方坐标。
GPS方位角系统转换及其精度的探讨

线为垂线 ,大地方位角的基准线为法线 。略去观测
目标天顶距 Z天 项影响 ,其关系式为[1] :
A = α- (λ - L ) sinΦ - (εXcosλcosΦ +εYsinλsinΦ
+εZsinΦ)
(4)
式中 ,A 为大地方位角 α, 为天文方位角 λ, 、Φ 为
测站的天文经纬度 ε, 为欧拉角 。
二 、GPS 方位角系统转换 1 、基本计算公式 GPS 方位角是以方位边两端点相对定位测量结 果为基础 ,然后采用一定的处理方法得到的 ,其计算 公式为[1 ] : A84 = tg - 1 [ ( - △X84 sinL 84 + △Y84 cosL 84) / ( △X84 sinB 84 cosL 84 2 △Y84 sinB 84 sinL 84 + △Z84 cosB 84) ]
表 1 “国系”GPS 方位角精度估算统计表
基线长度 km 大地坐标 误差影响
0. 6
1. 0
1. 5
2. 0
2. 5
3. 0
2 、转换参数及其误差的影响 我们知道 ,不同坐标系与“84 系”间转换参数的 大小及误差均不相同 ,因此 ,忽略转换参数及其误差 的影响也是不相同的 。“国系”与“84 系”间关系是明 确的 ,它们之间旋转参数是清楚的。而且通过建立全 国 GPS - A 级网 ,利用转换模型也反求出它们之间的 旋转参数 。通过有关文献分析表明“, 84 系”和“国系” 的旋转参数无论是定义值还是反求值均是一个微小 量 ,且较差很小 。经计算 ,在我国地区 ,视旋转参数为 0 时而产生的影响不大于 0. 1”,亦即 (εXcosL84cosB84 + εysinL84sinB84 +εΖsinB84) 项不大于 0. 1”。因此 ,在工程 测量中可以忽略不计 ;当采用“独立系”时 ,由于“独立 系”与“84 系”间关系是不明确的 ,它们之间旋转参数 也是不清楚的 。因此还需要根据坐标转换公式反求 出它们之间的旋转参数 。由于工程测量范围一般不 大 ,根据有关文献分析可知 ,反求的转换参数的精度 不会很高。如目前普遍采用七参数方法 ,当公共点为 四个 ,且为标准分布时 ,反求的七个转换参数的中误 差分别为[2] :
GPS坐标向地方坐标转换的两种方法精度比较_唐勇
山 西 建 筑 第2 0350
卷第 9年
5 2
期 月
S
HA
N
XI
A
RCH
IT
ECT
U
RE
VF eobl
.35 N o .5 . 2009
· 353 ·
期 月
SHA
N
XI
A
RCH
IT
ECT
U
RE
VFeobl ..3 5 2N0o0. 95
文章编号 :1009-6825(2009)05-0354-02
GPS RTK 与免棱镜全站仪在地形测量中的应用
彭 玉兵
摘 要 :根据测区的基本概况 , 介绍了 GPS RTK 技术和免棱镜全站仪在 地形测量中的应用 , 归纳了 RT K 信号不好 时的
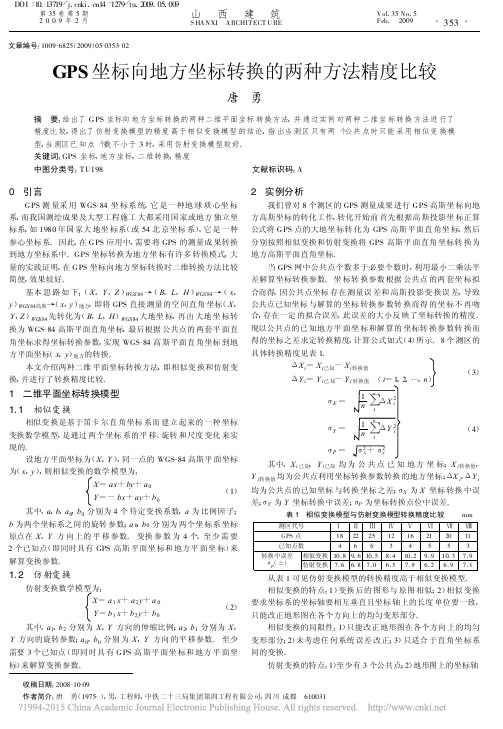
现以公共点的已 知地方平 面坐 标和解 算的 坐标转 换参 数转 换而
得的坐标之差求定转换精度 , 计算公式如式(4)所示 。 8 个 测区的
具体转换精度见表 1。 ΔXi =Xi已知 -Xi转换值 ΔY i =Y i已 知 -Y i 转换值
(i =1, 2, … , n)
(3)
σX =
∑ 1
n
n
ΔX
2007 , 33(15):361-362 .
On the precision comparison of two methods for the transformation from GPS coordinate to the local coordinate
TANG Yong Abstract :T he paper gives two two-dimension plane metho ds fo r transformation from G PS coo rdinate to the local coordina te , co mpares the precisio n of the bo th tw o-dimension transformation methods according to examples, co ncludes the precision o f the affine transformation model is hig her than the one o f the similitude transfo rmatio n model, and points out the similitude model can be adopted when there are o nly two common points in measured area , while it is better to adopt the affine transformation model when the known points are no less than three . Key words:G PS coordinate , local coordinate , two-dimension transformation, precision
浅谈GPS测绘存在误差及有效提高定位精度

由于地球周围的电离层对电磁波的折刺 喧 , 使得 G S信号的 P 传播速度发生变化, 这种变化称为电离层延迟。电磁波所受电离层折 射的影响与电磁波的频率以及电磁波传播途径 匕 电子 含量有关。
了 G S技术 ,保证 了数据资料的精度和工程的进度 。 P
周跳也称为失周 。在精密 的 GP S相对定位 中采用 的观测值 是相位观测值。相位观测值是接 收机本机振荡产生 的相位与接
收 到 的 卫 星 载波 相 位 之 差 ,在 测 量 时 , 只能 测 到 不 足 1 的 小 周 数部分 ( 可准到 00 周 ) .1 。 周跳对点位坐标的影响。在 G S相位测量 中,观测数据中 P 大于 l 的周跳 ,在数据预处理时不难发现 ,可予以消除 。然 0周 而 ,小于 1 O周的周跳 ,特别是 1 —5周的周跳 ,以及半周跳和
制测量平面和高程精度的手段 和措施 ,对 实际工作有一定的指导作用。 关 键 词 :土 地整 理 测 绘 ;G S卫 星测 量 ;误 差 ; 定位 ;精 度 P 中图分类号 : 2 84 文献标 识码 :A 文章编号 :10 P 2. 0 0—83 2 1 ) 6 0 6 2 16( 0 0 3 —0 1 —0
卫 星钟差是 GP S卫星上所安装 的原子钟的钟 面时与 G S P
标 准 时 间之 间的 误 差 。 11 卫 星 信 号 发射 天线 相 位 中心偏 差 .. 4 卫星信号发射天线相位 中心偏差是 G S卫星上信号发射天 P
( ) P 控制部分人为或计算机造成的影响。 2 GS
( )由于 GP 3 S控制部分 的问题或用户在进行数据处理时 引人的误差等 。 ( 4)数据处理软件 的影响。
GPS-RTK三种校正方法的实验与精度分析
G P S-R T K三种校正方法的实验与精度分析-CAL-FENGHAI-(2020YEAR-YICAI)_JINGBIANGPS-RTK三种校正方法的实验与精度分析吴松涛(本钢设计研究院有限责任公司 117000)摘要:载波相位差分技术(Reat Time Kinematic简称RTK)又称实时动态定位技术,能够实时提供指定坐标系的三维坐标成果,在测程20km以内可以达到厘米级精度。
广泛应用于工程放样、工程地形图测绘、房产测绘,地籍测量及某些控制测量,极大的提高了作业效率。
由于GPS定位是直接测定点位在WGS84坐标系中的坐标和高程,故我们需要通过点位校正或求得转换参数将测得的WGS84坐标系成果转换为我们所需要的坐标系。
文章以南方灵锐S86T型RTK为例对GPS—RTK的三种常见的校正方法(单点校正、两点校正、参数校正)的点位精度进行对比分析。
关键词:GPS-RTK;单点校正;二点校正;参数校正GPS—RTK系统由一个基准站,若干个流动站及通讯系统三部分组成,基准站包括GPS接收机、GPS天线、无线电通讯发射设备、基准站控制器、电源等部分组成,基准站GPS接收机本身具有传输参数、测量参数及坐标系统等内容的设置功能,使控制器与GPS接收机合为一体。
一个流动站由GPS天线、GPS接收机、电源、接收天线、通讯设备,电子手簿组成。
图1为RTK系统结构图。
(引自参考文献【1】)基准站移动站图1 RTK系统结构图1、 GPS-RTK点校正理论GPS点校正主要目的是建立GPS接收机采集的WGS84数据与地方控制网之间关系,不同坐标系之间的坐标转换通常有两类转换模式:一类是二维转换模式;一类是三维转换模式。
二维转换模式只适合于小区域转换且只需要两个坐标系的二维坐标成果;三维转换模式适合任何区域坐标转换。
二维转换模式通常采用平面四参数模型、三维转换模式通常采用布尔莎(Bursa)七参数转换模型。
1.1、单点校正单点校正并不依据上述转换模型,而是通过观测,求出校正点的WGS84坐标,再根据校正点的已知坐标求出3个平移参数(△X,△Y,△H),不考虑旋转参数及比例因子。
关于gps高程转换方法研究及精度的分析

2019年33期方法创新科技创新与应用Technology Innovation and Application关于GPS 高程转换方法研究及精度的分析缪祥柱(云南工业技师学院,云南曲靖655000)GPS 是一项高科技定位技术,可以测量静态物体和移动物体的准确位置,并且还能通过建立相应三维坐标系的方式,来判断物体的高度信息。
该技术在我国许多领域都有着极为重要的作用,现阶段,技术人员正在研究的问题是GPS 高程转换的方法及转换的精度,目的是为了推动GPS 技术的发展,创造更为广阔的应用前景。
1GPS 高程转换的基本操作原理及相关注意事项想要开展GPS 高程转换工作,首先就需要了解转换操作的基本原理,了解操作时应当注意哪些问题,这样才能达到事半功倍的效果。
1.1基本内容及原理我国高程系统普遍采用正常高系统,传统的水准测量获取结果是基于大地水准面的正常高。
但是,从GPS 测量工作方面看,通过卫星定位系统探测到的地面高程信息主要是基于WGS-84参考椭球的大地高。
与地质勘察工作、城市基础建设、军事建设等方面对高程数据的需求之间有一定的差异性。
针对这个问题,技术人员想要应用先进的科技手段完成地面高程的定位测量工作,就必须要掌握科学转换GPS 高程数据的基本方法。
在具体转换过程中,技术人员需要掌握GPS 高程的计算公式,通过信息技术手段方便快捷的完成GPS 高程转换工作。
这样还可以有效降低GPS 高程转换过程中的误差问题,降低技术人员的工作压力。
1.2相关注意事项在具体进行GPS 高程转换工作时,还有一些注意事项需要遵守。
首先,就是该项操作对技术人员的专业工作能力要求比较高,需要技术人员不断总结个人工作经验,积极参加集体培训工作,提高自身的技术操作能力。
从而掌握先进的信息技术的操作方法,达到GPS 高程转换的目的。
同时,在具体的转换研究工作中,需要加大资金技术投入引进相应的工作设备,包括卫星接收装置,计算机软硬件设。
利用GPS-RTK技术提高测量精度的探讨

利用GPS-RTK技术提高测量精度的探讨摘要:GPS测量是通过接收卫星发射的信号而进行数据处理,具有快速、高精度的测量方法,在实际作业中的应用范围也越来越广泛。
本文以Lucia(徕卡)SR530的实际应用和技术发展的现状,详细分析了影响RTK测量精度的诸多因素,并根据工作实际;提出了如何提高RTK测点精度的方法及措施。
关键词:RTK;测量;精度Abstract: GPS measurement signal emitted by the reception of satellite data processing, a fast, high-precision measurement method, and more widely in the actual job. In this paper, Lucia (徕卡) SR530 practical application and technical development of the status quo, a detailed analysis of the impact of RTK measurement accuracy of many factors, and actual work; methods and measures on how to improve the accuracy of the RTK points.Keywords: RTK; measurement; accuracy GPS常规静态方式用于大地控制网和加密控制点的测量,从静态、动态的出现,随着RTK(RealTimeKinematic)实时动态技术的应用,取得了较高的测量精度,实践证明:精度上也能满足控制测量的要求,但与静态相比,GPS-RTK精度上还有一定差距,且也存在着缺少检核、可靠性不高的因素。
那么有哪些因素影响RTK测量精度的可靠性,如何来提高RTK测量精度呢?1.影响RTK测量的精度的因素GPS测量定位的系统误差主要来源于GPS卫星星历、电离层散射、多路径效应、基准站坐标、卫星钟与接收机钟误差、天线相位中心位置的偏差、接收机不同通道间的延迟误差;其他还有地球自转、地球潮汐、基线解算时的软件、基线解算时不同的数学模型误差等。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
!X 84 sinB国cosL 国 ! Y84 sinB国sinL 国+ ! Z84 cosB 国) ]
( 7) 显然, ( 6) 式和( 7) 式是等价的, 它们均忽略了欧 拉角的影响。实际作业中, 可以直接利用( 7) 式计算 A国 ; 也要先利用( 1) 式计算 A84 ( 此时 L84、B84 可取近 似值, 如取 L国 、B国, 而不影响 A国 的精度) , 再利用 ( 6) 式计算 A 国。 三、系统转换后 GPS 方位角的精度 1、大地坐标误差和基线观测误差的影响
式中, A 为大地方位角。
如果将过方位边一端点相对不同参考椭球法线
之间的关系, 视为同一参考椭球法线与垂线之间的 关系, 则可参考( 4) 式列出 84 系 与 国系 GPS 方位 角的关系:
[ 收稿日期] 2000# 8# 28
2001 年第 1 期
0. 5
0. 4
0. 1
0. 1
0. 1
0. 1
0. 1
0. 1
0. 1
0. 1
0. 1
!A国
2. 0
1. 2
0. 9
0. 7
0. 6
0. 6
0. 5
0. 5
0. 4
表 2 独立系 GPS 方位角精度估算统计表
基线长度 km 大地坐标 误差影响 基线观测 误差影响 m 的影响
mm = & cos2P ( m ! T 2+ m ! G2) / ( 8a2sin2P ) + ( mmT 2+ mmG2) / ( 2a2)
26
∀北京测绘∀
2001 年第 1 期
式中 P 为公式点分布区域半径, m !T 、m! G 为公 共点在 84 系 和 独立系 中相对坐标误差平均值, mmT、mmG为公共点在 84 系 和 独立系 中( 绝对) 坐 标误差平均值, 具体含义见文献[ 2] 一般情况下公共 点相对点位误差为厘米级, 绝对坐标 误差为米级。 取 m !T = m! G= & 0. 05m、mmT = mmG= & 5m, 当公共 点分布区域为 100km ∃ 100km 即 P ∋0. 5(时, 求定的 旋转参数之中误差分别约为:
表 1 国系 GPS 方位角精度估算统计表
基线长度 km 大地坐标 误差影响
0. 6
1. 0
1. 5
2. 0
2. 5
3. 0
3. 5
4. 0
5. 0
0. 1
0. 1
0. 1
0. 1
0. 1
0. 1
0. 1
0. 1
0. 1
基线观测 误差影响
忽略 的影响
1. 9
1. 2
0. 9
0. 7
0. 6
0. 6
0. 5
式中( !A84- !L84sinB84) 项中, !L84sinB84相当
于子午线收敛角改正, 是由于测站大地经度 L84存在 误差 !L84 对 A84产 生的 影响, 经过 - !L84sinB84 修 正, 剩下的是基线观测误差的影响, 近似认为基线分 量的精度相当, 即 m! X = m !Y = m! Z = mG。经分析 可知, 基线观测误差对方位角影响的最大中误差为 mG/ D ∃ 206265%; 式 中( !L国 sinB84) 项, 是由于 测站 在 国系 中大地经度 L国 存在误差 !L国 而产生的 影响。根据不同大地坐标系大地坐标转换公式[ 1] 经 计算可知, !L国 一般不大于 0. 1%, 则( !L国 sinB84) 项不大于 0. 1%: 式中[ ( L84- L国) cosB84 ∃ !B84/ ∀] 项, 是测站在 84 系 中大地纬度 B84存在误差 !B84和在 二种坐标系中大地经度之差( L84- L国 ) 的联合影响。 根据统计, 在我国大陆地区, 一个点( L84 L国) 和( B84 B国) 一般在数秒的量级, 即是当 B84采用 B国, !B84也 不过为数秒量级。因此, 此项很小, 可以忽略不计。
mX= & m Y= & mZ= &
( m ! T 2+ m ! G2) / ( 8a2 sin2P ) ( m ! T 2+ m ! G2) cos2 P/ ( 4a2 sin2P ) + ( mmT 2+ mmG2) / a2 ( m ! T 2+ m ! G2) cos2P / ( 4a2sin2P ) + ( mmT 2+ mmG2) / a2
( 1) 式中( L84、B84) 为测 站在 84 系 中的大地经纬 度, ( !X84、!Y84、! Z84 ) 为 基线在相应球心空间直 角坐标系中的基线分量, A84属于 84 系 , 由于工程 测量一般不采用 84 系 , 因此还需进行转换。我们
知道, 测站在 国系 中的大地经纬度一般是已知的, 或者通过 GPS 相对定位联测是可知的。因此, GPS 方位角的系统转换实质是基线分量的系统转换。不
计算, 可得到 国系 中的 GPS 方位角 A 国, 即:
A 国 = tg- 1[ ( - !X 国 sinL 国 + ! Y国 cosL 国) / ( -
!X 国 sinB 国 cosL 国 ! Y国 sinB国 sinL 国+ !Z 国 cosB 国) ]
( 3)
2、不同坐标系 GPS 方位角的关系
设测 站 大地 经 纬度 误 差分 别 为 !L84、! B84、 !L国, 基线观测误差的影响为 !A84, 由( 6) 式可得:
!A 国 = ( !A 84- !L 84 sinB84) + ( !L 国 sinB84)
[ ( L 84- L 国) cosB 84 ∃ ! B84/ P]
( 8)
天文测量是以测站铅垂线为准的, 大地测量计
算是以椭球面法线为准的, 亦即天文方位角的基准
线为垂线, 大地方位角的基准线为法线。略去观测 目标天顶距 Z天 项影响, 其关系式为[ 1] :
A = - ( - L ) sin ! - ( Xcos cos ! + Ysin sin !
+ Zsin!)
( 4)
把 84 系 中的基线 矢量当作 国系 中 的基线矢 量。由( 3) 式、( 5) 式可得到 GPS 方位角由 84 系 转
换到 国系 的实用计算公式为:
A 国= A 84- ( L84- L 国) sinB84
( 6)
A 国= tg - 1[ ( - !X 84 sinL 国 + ! Y84 cosL 国) / ( -
( m XcosL 84 cosB 84) 2+ ( m YsinL84 sinB 842) + ( m ZsinB 84) 2
∋ & 0. 3 3、转换后 GPS 方位角的精度 ( 1) 精度估算 综合上述分析, 以采用观测精度为( 5+ 1 ∃ 10- 6
D) GPS 接收机为例, 并取 B= 40(、L= 110(当方位边 为不同长度时, 系统转换后 GPS 方位角精度估算结 果见表 1、表 2。
24
∀北京测绘∀
2001 年第 1 期
GPS 方位角系统转换及其精度的探讨
王建斌
( 80810 部队, 北京 100085)
[ 摘 要] 本文根据不同坐标系 GPS 方位角转换的 特点和天文方位角化 算为大地方位角的 方法, 列出了 GPS 方位角系统转换的实用公式, 并借鉴拉 普拉斯方 位角精度分 析思路, 对系统转换 后 GPS 方位角精度 进行了定 量分 析。
顾及尺度参数的 影响, 基 线分量由 84 系 转 换到 国系 的计算公式为[ 1] :
!X
!X
! Y = R1( X ) R 2( Y) R3( Z ) ! Y
( 2)
!Z 国
! Z 84
式中, R 为旋转矩阵。由于 国系 与 84 系 间
转换参数是已知的。因此按( 2) 式转换后再按( 3) 式
2、转换参数及其误差的影响 我们知道, 不同坐标系与 84 系 间转换参数的 大小及误差均不相同, 因此, 忽略转换参数及其误差 的影响也是不相同的。 国系 与 84 系 间关系是明 确的, 它们之间旋转参数是清楚的。而且通过建立全 国 GPS- A 级网, 利用转换模型也反求出它们之间的 旋转参数。通过有关文献分析表明, 84 系 和 国系 的旋转参数无论是定义值还是反求值均是一个微小 量, 且较差很小。经计算, 在我国地区, 视旋转参数为 0 时而产生的影响不大于 0. 1 , 亦即( XcosL84cosB84+ ysinL84sinB84+ #sinB84) 项不大于 0. 1 。因此, 在工程 测量中可以忽略不计; 当采用 独立系 时, 由于 独立 系 与 84 系 间关系是不明确的, 它们之间旋转参数 也是不清楚的。因此还需要根据坐标转换公式反求 出它们之间的旋转参数。由于工程测量范围一般不 大, 根据有关文献分析可知, 反求的转换参数的精度 不会很高。如目前普遍采用七参数方法, 当公共点为 四个, 且为标准分布时, 反求的七个转换参数的中误 差分别为[ 2] :
mDXO = & mDYO= & mDZO = &
( m !T 2+ m ! G2) / ( 8sin2P ) ( 1+ cos 2P) 2( m ! T 2+ m ! G2) / ( 16a2sin2P ) + ( mmT 2+ mmG2) ( 1+ cos2P ) / 4 ( 1+ cos2P ) 2( m ! T 2+ m ! G2) / ( 16a2 sin2 P) + ( mmT 2+ mmG2) ( 1+ cos2P ) / 4