一类线性负反馈系统的数学描述
线性系统的数学模型

描述控制系统输入、输出变量及内部变量之间关 系的数学表达式称为系统的数学模型。
★ 描述控制系统的输入-输出变量数学模型:
微分方程、传递函数、方框图、频率特性
★ 描述控制系统的内部变量数学模型: 状态空间
说明 ◆ 要分析自动控制系统的性能,必须先建立该系统 的数学模型; ◆ 一个物理系统,要处理的问题或要达到的精度不 同,得到的数学模型也不同。
3.反馈
R(S) E(S) + B(S) H(S) C(S)
G(S)
负反馈 正反馈 单位反馈:H(S)=1
主 要 内 容
§2-1 微分方程 §2-2 传递函数
§2-3 典型环节的传递函数及动态响应
§2-4 电气网络的运算阻抗与传递函数 §2-5 方框图 §2-5 反馈控制系统的传递函数
§2-1
微分方程
对于线性定常系统, 可以用线性常系数微分方程 作为其数学模型,如 a 0dnc (t)/dtn +a1dn-1c (t) /dtn-1+…+anc (t) =b0dmr(t)/dtm +b1dm-1r(t)/dtm-1+…+bmr(t) c(t): 系统的输出; r(t): 系统的输入; a0……an ; b0……bm 均为实数,均由系统本身的结
对电气网络,可以不列微分方程,仅利用运算电 路,经过简单的代数运算,就可以求得传递函数!
§2-5 控制系统的方框图
方框图是以图形表示系统的数学模型;
通过方框图,能够非常清楚地表示出信号在系统各
环节之间的传递过程;
方框图可以方便地求出复杂系统的传递函数; 方框图是分析控制系统的一个简明而有效的工具。
八.二阶振荡环节 1、传递函数
第二章线性自动调节系统的数学描述
静态方程反映了在稳态时输出与输入之间的关系
§2-3 脉冲响应和阶跃响应
典型的输入函数
单位脉冲函数 单位阶跃函数
单位斜坡函数
单位脉冲响应
定义:在输入为单位脉冲函数时,系统输出随时间 而变化的过程,称为单位脉冲响应。
数学表达式: (t ) Байду номын сангаас 0
拉式变换
(an s n an1s n1 a1s a0 )C (s ) (bm s m bm1s m1 b1s b0 ) R( s)
传递函数
C (s) bm s m bm1s m1 b1s b0 G( s ) R(s) an s n an1s n1 a1s a0
G( s) ( s Z1 )( s Z 2 )( s Z m ) C ( s) K R( s ) ( s P )( s P2 )( s Pm ) 1
(n m)
静态放大系数及静态方程
若取
s0
,即微分方程所有导数项为零
a0c(t ) b0r (t )
( 就是静态放大系数 则传递函数G 0)
传递函数
C (s) e s R(s) G( s) e s R( s ) R( s )
纯迟延环节
c(t ) L [e
1
s
1 ] 1(t ) s
单位阶跃响应曲线
纯迟延环节
纯迟延环节可以看作无穷多个一阶惯性 环节的串联
1 lim s e s n n e 1 s n 1
E s K G s w s RCs 1
高等代数与解析几何1 负反馈

高等代数与解析几何1 负反馈摘要:1.高等代数与解析几何的概述2.负反馈的概念和特点3.负反馈在高等代数与解析几何中的应用4.负反馈的重要性和意义正文:一、高等代数与解析几何的概述高等代数与解析几何是数学中的两个重要分支。
高等代数主要研究向量空间、线性变换、矩阵、行列式等概念,旨在理解线性关系和线性结构的性质。
解析几何则主要研究空间中点、线、面的性质及其相互关系,侧重于几何问题与代数方法的结合。
二、负反馈的概念和特点负反馈是指一个系统的输出被送回到输入端,与输入信号相反,从而减小输入信号对系统的影响。
在数学中,负反馈通常表现为一个方程或不等式,它使得一个变量的增大导致另一个变量的减小,反之亦然。
负反馈具有以下特点:1.稳定性:负反馈能够使系统更加稳定,减小外部扰动对系统的影响。
2.调节性:负反馈能够调节系统内部变量,使其在一定范围内波动。
3.可逆性:负反馈具有可逆性,即系统输出可以影响输入,反之亦然。
三、负反馈在高等代数与解析几何中的应用负反馈在高等代数与解析几何中的应用非常广泛,例如:1.线性方程组的解:线性方程组的解可以通过负反馈来理解。
当一个方程的解影响到另一个方程时,它们之间就形成了负反馈。
2.矩阵的特征值和特征向量:矩阵的特征值和特征向量可以通过负反馈来理解。
特征值是使得矩阵乘以特征向量后得到一个标量乘以特征向量的数,它们之间存在负反馈关系。
3.解析几何中的曲线:解析几何中的曲线可以通过负反馈来理解。
例如,圆的方程中,半径与圆心到圆上任意一点的距离之间存在负反馈关系。
四、负反馈的重要性和意义负反馈在高等代数与解析几何中的重要性不言而喻。
它不仅帮助我们理解许多复杂的数学概念,还使我们能够更好地把握系统的稳定性和调节性。
自动控制原理及其应用试卷与答案
⾃动控制原理及其应⽤试卷与答案21.⼀线性系统,当输⼊是单位脉冲函数时,其输出象函数与传递函数相同。
22.输⼊信号和反馈信号之间的⽐较结果称为偏差。
23.对于最⼩相位系统⼀般只要知道系统的开环幅频特性就可以判断其稳定性。
24.设⼀阶系统的传递G(s)=7/(s+2),其阶跃响应曲线在t=0处的切线斜率为 2 。
25.当输⼊为正弦函数时,频率特性G(j ω)与传递函数G(s)的关系为 s=jω。
26.机械结构动柔度的倒数称为动刚度。
27.当乃⽒图逆时针从第⼆象限越过负实轴到第三象限去时称为正穿越。
28.⼆阶系统对加速度信号响应的稳态误差为 1/K 。
即不能跟踪加速度信号。
29.根轨迹法是通过开环传递函数直接寻找闭环根轨迹。
30.若要求系统的快速性好,则闭环极点应距虚轴越远越好。
21.对控制系统的⾸要要求是系统具有 .稳定性。
22.在驱动⼒矩⼀定的条件下,机电系统的转动惯量越⼩,其 .加速性能越好。
23.某典型环节的传递函数是21)(+=s s G ,则系统的时间常数是 0.5 。
24.延迟环节不改变系统的幅频特性,仅使相频特性发⽣变化。
25.⼆阶系统当输⼊为单位斜坡函数时,其响应的稳态误差恒为 2ζ/n 。
26.反馈控制原理是检测偏差并纠正偏差的原理。
27.已知超前校正装置的传递函数为132.012)(++=s s s G c ,其最⼤超前⾓所对应的频率=m ω 1.25 。
28.在扰动作⽤点与偏差信号之间加上积分环节能使静态误差降为0。
29.超前校正主要是⽤于改善稳定性和快速性。
30.⼀般讲系统的加速度误差指输⼊是静态位置误差系数所引起的输出位置上的误差。
21.“经典控制理论”的内容是以传递函数为基础的。
22.控制系统线性化过程中,变量的偏移越⼩,则线性化的精度越⾼。
23.某典型环节的传递函数是21)(+=s s G ,则系统的时间常数是 0.5 。
24.延迟环节不改变系统的幅频特性,仅使相频特性发⽣变化。
负反馈
反馈量与输出电压成比例, 反馈量与输出电压成比例, 所以是电压反馈。 所以是电压反馈。 从输入端看有: 从输入端看有: id = ii -iF 故为并联负反馈。 故为并联负反馈。 根据瞬时极性判断是负反馈,所以该电路为电压串联负 根据瞬时极性判断是负反馈,所以该电路为电压串联负 反馈
四.电流串联负反馈
反馈量与输出电压成比例, 反馈量与输出电压成比例, 成比例 电压反馈。 所以是电压反馈 所以是电压反馈。 从输入端看, 从输入端看,有: d = vi -vF v 故为串联负反馈。 故为串联负反馈。
Rs + Vs – – Vi + Vf – R1 Vo R2 – Ii + + Vid – – RL + AVOVid ri –
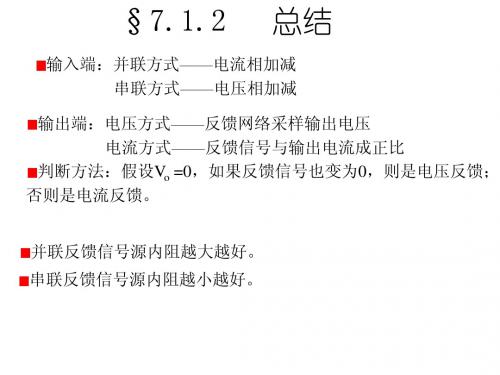
方式——电流相加减 串联方式——电压相加减 输出端:电压方式——反馈网络采样输出电压 电流方式——反馈信号与输出电流成正比 判断方法:假设Vo =0,如果反馈信号也变为0,则是电压反馈; 否则是电流反馈。 并联反馈信号源内阻越大越好。 串联反馈信号源内阻越小越好。
几个基本概念 二. 几个基本概念
1. 正向传输与反向传输 正向传输——信号从输入端到 信号从输入端到 正向传输 输出端的传输
vI
反向传输——信号从输 信号从输 反向传输 出端到输入端的传输
R2
反馈传输(通路 反馈传输 通路) 通路 (反馈网络) 反馈网络)
+ -
vO
vI
RL
R1 + -
vO
RL
信号的正向传输
信号的正向传输
电路中只有正向传输 , 没有 反向传输, 开环状态。 反向传输,称为开环状态。
电流负反馈: 电流负反馈:稳定输出电流 并联反馈:输入端电流求和( 并联反馈:输入端电流求和(KCL) ) 其他两种组态有类似的结论
负反馈控制原理
负反馈控制原理负反馈控制原理是一种控制系统的基本原理,通过引入负反馈作用,可以使得控制系统更加稳定、精确地控制被控对象。
负反馈控制原理在自动控制领域有着广泛的应用,本文将从负反馈控制的基本原理、负反馈控制的优点、负反馈控制的建模方法及负反馈控制的设计和调节方法等方面进行介绍。
负反馈控制的基本原理:负反馈控制是指将被控对象的输出信号与期望输出信号之差作为控制系统的反馈信号,通过控制器产生控制信号来调节被控对象。
负反馈控制的基本原理是根据反馈信号中包含有由被控对象产生的扰动信号,通过对这些扰动信号进行处理,反馈给被控对象进行补偿,从而使得被控对象的输出信号能够接近期望输出信号,达到控制系统稳定、准确控制的目的。
负反馈控制的优点:1. 提高系统稳定性:负反馈控制通过引入反馈信号来补偿被控对象的扰动,从而降低由扰动引起的系统不稳定性。
2. 提高系统精度:通过对反馈信号的处理,反馈控制可以消除系统中的误差,使得系统输出更加准确。
3. 抑制系统非线性:负反馈控制可以通过对反馈信号的处理来抑制系统非线性,提高系统的线性度和鲁棒性。
4. 减小外部干扰:负反馈控制可以通过利用反馈信号来抵消外部干扰对系统的影响,提高系统的抗干扰能力。
5. 方便系统分析与设计:负反馈控制使得系统的动态特性主要由反馈环节决定,方便进行系统的分析和设计。
负反馈控制的建模方法:在设计负反馈控制系统之前,需要对被控对象进行建模。
常见的建模方法有传递函数模型和状态空间模型。
传递函数模型适用于线性时间不变系统的建模,可以通过实验或理论推导得到系统的传递函数。
状态空间模型适用于非线性、时变系统的建模,可以通过系统的状态方程和输出方程来描述系统的动态行为。
负反馈控制的设计和调节方法:负反馈控制系统的设计和调节是指根据系统的要求和性能指标,设计合适的控制器,并对控制器参数进行调节,以使得系统能够达到所期望的控制效果。
常见的设计和调节方法包括:PID控制器设计和参数调节、根轨迹法、频率响应法、最优控制等。
全国自考(机械工程控制基础)模拟试卷6(题后含答案及解析)

全国自考(机械工程控制基础)模拟试卷6(题后含答案及解析) 题型有:1. 单项选择题 2. 填空题 3. 简答题 4. 分析计算题单项选择题1.一个系统稳定的充要条件是【】A.系统的全部极点都在[s]平面的右半平面内B.系统的全部极点都在[s]平面的上半平面内C.系统的全部极点都在[s]平面的左半平面内D.系统的全部极点都在[s]平面的下半平面内正确答案:C解析:系统稳定的充要条件是系统的全部极点都位于[s]平面的左半平面。
2.设某系统的特征方程为s3+4s2+s+K=0,则此系统稳定时K值范围为【】A.K>0B.0<K<4C.K>4D.K<0正确答案:B解析:由胡尔维茨稳定性判据知,对于三阶系统,系统稳定的充要条件是(1)各系数均大于零,即K>0;(2)特征方程的系数内积大于外积,即4>K,故选B。
3.一单位负反馈控制系统的开环传递函数为,则使该闭环系统稳定的K值范围是【】A.K>0B.K>0.1C.K>0.5D.K<0.5正确答案:C解析:此闭环系统的特征方程为:s3+5Ks2+(2K+3)s+10=0对于三阶系统,要使系统稳定,则各系数必须均大于0,且内积大于外积。
即由此可解得K>0.5,故选C。
4.利用奈奎斯特稳定性判据判断系统的稳定性时,z=p-N中的z表示意义为【】A.开环传递函数零点在[s]左半平面的个数B.开环传递函数零点在[s]右半平面的个数C.闭环传递函数零点在[s]右半平面的个数D.闭环特征方程的根在[s]右半平面的个数正确答案:D5.已知最小相位系统的相位裕量为45°,则【】A.系统稳定B.系统不稳定C.当其幅值裕量大于0分贝时,系统稳定D.当其幅值裕量小于或等于0分贝时,系统稳定正确答案:C解析:当相位裕量和幅值裕量都为正值时,最小相位系统是稳定的。
若两者均为负值,则最小相位系统不稳定。
6.以下关于系统性能指标的说法中错误的是【】A.系统性能指标可分为时域性能指标和频域性能指标B.时域性能指标可分为瞬态性能指标和稳态性能指标C.瞬态性能指标和稳态性能指标可以相互转化D.频域性能指标与时域性能指标存在一定的关系正确答案:C7.某控制器的传递函数为Gc(s)=(T>0),若将此控制器作为相位超前校正环节使用,则【】A.α>1B.α=1C.α=0D.0<α<1正确答案:A8.传递函数为Gc(s)=的控制器为【】A.P校正B.PI校正C.PD校正D.PID校正9.串联相位滞后校正通常用于【】A.提高系统的快速性B.提高系统的稳态精度C.减小系统的阻尼D.减小系统的自然频率正确答案:B解析:串联相位滞后校正的目的是为了减小系统的稳态误差而又不影响稳定性和响应的快速性。
放大器正反馈和负反馈概念

放大器正反馈和负反馈概念放大器的信号传输都是从放大器的输入端传输到放大器输出端,但是反馈过程则不同,它是从放大器输出端取出一部分输出信号作为反馈信号,再加到放大器的输入端,与原放大器输入信号进行混合,这一过程称为反馈。
①反馈方框图如图1所示是反馈方框图。
从图中可以看出,输入信号Ui从输入端加到放大器中进行放大,放大后的输出信号Uo其中的一部分加到下一级放大器中,另有一部分信号经过反馈电路作为反馈信号UF,与输入信号Ui合并,作为净输入信号VI加到放大器中。
图1 反馈方框图②反馈种类反馈电路有两种:正反馈电路和负反馈电路。
这两种反馈的结果(指对输出信号的影响)完全相反。
③正反馈概念正反馈可以举一个例子来说明,吃某种食品,由于它很可可,所以在吃了之后更想吃,这是正反过程。
如图2所示正反馈方框图,当反馈信号UF与输入信号Ui是同相位时,•这两个信号混合后是相加的关系,所以净输入放大器的信号UI•比输入信号Ui更大,而放大器的放大倍数没有变化,这样放大器的输出信号Uo比不加入反馈电路时的大,这种反馈称为正反馈。
图2 正反馈方框图在加入正反馈之后的放大器,输出信号愈反馈愈大(当然不会无限制地增大,这一点在后面的振荡器电路中介绍),这是正反馈的特点。
正反馈电路在放大器电路中通常不用,它只是用于振荡器中。
④负反馈概念负反馈也可以举一例说明,一盆开水,当手指不小心接触到热水时,手指很快缩回,而不是继续向里面伸,手指的回缩过程就是负反馈过程。
如图3所示是负反馈方框图,当反馈信号UF相位和输入信号Ui的相位相反时,它们混合的结果是相减,结果净输入放大器的信号UI 比输入信号Ui要小,•使放大器的输出信号Uo减小,引起放大器电路这种反馈过程的电路称为负反馈电路。
图3 负反馈方框图⑤反馈量负反馈的结果使净输入放大器的信号变小,放大器的输出信号减小,这等效成放大器的增益在加入负反馈电路之后减小了。
当负反馈电路造成的净输入信号愈小,即负反馈量愈大,负反馈放大器的增益愈小,反之负反馈量愈小,负反馈放大器的增益愈大。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
=v
mg k
1 −
−
e
k m
t
(5)
从(5)式可以看出,随着时间 t 的增加,物体下落的速度逐渐接近于常数 mg ,最后物体的运动趋于 k
匀速它所激发的磁场通过线圈自身的磁通量也在变化[5],线圈自身通过产生感
应电动势来减弱这一变化。法拉第电磁感应定律就是对这一负反馈现象的描述。
关键词
封闭系统,负反馈,数学模型
文章引用: 马文东. 一类线性负反馈系统的数学描述[J]. 现代物理, 2019, 9(3): 121-125. DOI: 10.12677/mp.2019.93014
马文东
Copyright © 2019 by author(s) and Hans Publishers Inc. This work is licensed under the Creative Commons Attribution International License (CC BY). /licenses/by/4.0/
Open Access
1. 引言
反馈现象源自于电子放大电路的“反馈”概念,主要是指信号经过放大电路时,输出信号回授至输 入端时所引起的输出信号加强(正反馈)或减弱(负反馈)现象。目前有关反馈现象的研究,除去电子放大电 路之外,还常见于系统动力学的基本理论研究[1]。但有关负反馈方程的研究仅局限于电子线路中的放大 器,并且多以实验性测试而进行的定性或半定量分析为主[2],缺少具体的反馈机制性的研究。反馈机制 的复杂程度是显而易见的,本文所要讨论的是反馈现象中的负反馈现象,并且仅限于反馈因子是线性的 线性负反馈。
知网检索的两种方式:
1. 打开知网页面 /kns/brief/result.aspx?dbPrefix=WWJD 下拉列表框选择:[ISSN],输入期刊 ISSN:2161-0916,即可查询
2. 打开知网首页 / 左侧“国际文献总库”进入,输入文章标题,即可查询
如图 1 所示,电阻 R 和电感 L 都是常量(电感 L 的电阻不计),当开关 S 闭合时,电路中的电流开始 增加。由法拉第电磁感应定律知,当电流 i 变化时,L 上有感应电动势 −L di 。由回路电压定律可得
dt
E − iR = L di
(6)
dt
Figure 1. RL circuit 图 1. RL 电路
Keywords
Closed System, Negative Feedback, Mathematical Model
一类线性负反馈系统的数学描述
马文东
江苏省淮北中学,江苏 宿迁
收稿日期:2019年4月9日;录用日期:2019年4月28日;发布日期:2019年5月5日
摘要
本文构建了线性负反馈方程,对封闭系统从一个状态到另一个状态演变过程中,系统自身的维持和对系 统内环境的适应性作了简化性的数学描述。
Wendong Ma
Jiangsu Huaibei Middle School, Suqian Jiangsu
Received: Apr. 9th, 2019; accepted: Apr. 28th, 2019; published: May 5th, 2019
Abstract
A linear negative feedback equation is constructed. The simplified mathematical description of the system’s own maintenance and adaptability to the environment of the system is made during the evolution of the closed system from one state to another.
2) 物体质量是物体惯性大小的量度,这一论断在负反馈方程的解
f
=
I
−kt
(1− e m )
k
中得到了明确的、强有力的理论说明:内禀常数 m 的大小,决定了系统在诱导量 I 的作用下,重新达到 稳定性的快慢。常数 m 越大,系统到达新平衡态越迟,体现的是系统保持原有状态不变的性质,即物体 的惯性。
DOI: 10.12677/mp.2019.93014
k 比,k 是由系统内环境因素决定的。内禀常数 m 和反馈系数 k,反映了在系统演化过程中,当一个平衡态 被破坏后,在到达新的平衡态前,系统对自身稳定性的维持(通过 m 体现)和对环境适应性调整(通过 k 体 现)的规律性。
5) 线性负反馈模型可以为更加复杂的非线性负反馈研究提供理论基础。
4. 结论
−ρ0 。于是所求 CO2 浓度的解为
( ) =ρ ρ0 1− e−kt
(3)
由(3)式可以看出,随着时间 t 的增加,CO2 气体浓度 ρ 逐渐接近于常数 ρ0 ,且不会超过 O2 的开始浓
DOI: 10.12677/mp.2019.93014
122
现代物理
马文东
度 ρ0 ,CO2 达到一定浓度,燃烧就会停止。 2.2. 自由落体中的负反馈
124
现代物理
马文东
LR 电路中的电感系数 L,和内禀常数 m 相比,同样起到延缓电流 i 增长的作用。 3) 在负反馈方程中,当诱导量 I 消失后,方程就和法拉第电磁感应定律方程形式相同,意义也相同。 反馈系数 k 的符号,对应的是楞次定律的思想。当环境中反馈因子不存在时,方程就和牛顿第二定律形 式相同。 4) 在封闭系统内,反馈系数 k 削减了诱导量 I 的作用,最终使 f 稳定在 I 的大小。和内禀常数 m 相
2. 线性负反馈问题
2.1. 燃烧现象中的负反馈
我们观察到,在一个封闭系统中,燃烧生成物 CO2 气体对燃烧的进程会有阻碍作用。由反应方程式
C + O2 = CO2 知,随着 CO2 气体浓度的升高,O2 的浓度在下降,因它们的浓度变化比例相同。由燃烧规
律,设 CO2 气体浓度的变化率和 O2 浓度成正比,且 O2 起始浓度为 ρ0 ,产生的 CO2 气体浓度为 ρ ,则有
3.2.2. 负反馈方程的意义 1) 系统从一个平衡态到另一个平衡态发展的过程中,负反馈方程
I − kf = m df dt
能帮助我们清楚这一演变的过程。在燃烧现象中,一个封闭系统,燃烧生成物 CO2 气体浓度的增加,是 由碳在氧气中燃烧导致的,但随着 CO2 气体浓度的增加,又对燃烧的进程起阻碍作用。当 CO2 气体达到 一定浓度时,燃烧就会停止,系统进入平衡态;在自由落体现象中,物体速度的增加是由重力引起的,
但随着物体速度的增大,物体所受空气阻力也会增大,当阻力和重力平衡时,速度就趋于稳定值;同样,
在 LR 电路中,感应电流 i 是由电动势E引起的,但随着电流 i 的产生,电感线圈中就会出现反向的感应
电动势,这个感应的电动势削减了E的作用。由此看出,诱导量 I 促使物理量 f 的产生,但通过反馈因子
k 又对物理量 f 的产生起到抑制作用,保持了系统状态的相对稳定性。
由于负反馈方程(8)中的相关物理量在不同事件中的意义不同,所以说负反馈方程式(8),更多意义上 表达的是,不同负反馈现象中相关因素的一种结构关系。在诸多负反馈现象中,凡反馈方程可以表达成
形如式(8)的,说明他们都有相同的反馈结构。对于同一反馈类型,反馈因子 k 是相同的常数。但在不同 形式的反馈中,常数 k 又是不同的,它的大小由具体的反馈实验测量而得。
从式(1)、(4)、(6)式看出,在线性负反馈中,都有一个稳定的诱导量 I (如以上各式中的 k ρ0 、mg 和 E ), 反馈量 kf (如上述各式中的 k ρ 、 kv 和 Ri ),以及内禀常数 m (如以上(4)、(6)式中的 m,L,(1)式中的常数
为 1)。由此,负反馈标准方程可经验地表示为
在电子放大电路中,负反馈是通过反馈信号使得净输入量减小,从而提高增益的稳定性,减小非线 性失真[3]。许多现象表明,负反馈在系统从平衡态被破坏到新平衡态建立过程中,同样起着重要的作用, 在诸如燃烧、落体运动、LR 电路等系统中都有负反馈现象发生。
本文旨在建立一类线性负反馈的数学模型,完整反映封闭系统中相关物理量变化的规律。
I − kf = m df
(8)
dt
这个方程的一个特解是
=f
I k
1 −
−
e
kt m
(9)
3.2. 模型讨论及意义
3.2.1. 负反馈方程的性质 负反馈方程(8)是具有线性反馈因子 kf 的一阶微分方程。“负反馈”概念虽然来自于电子放大电路,
很明显,本文所建立的负反馈方程远远超出了电子放大器所研究的范围,其意义更广,范围也更大。需 要说明的是,相比于那些非线性反馈因子 kf n (n > 1),本文所讨论的线性负反馈是最简单的一种类型。在 涉及速度负反馈问题中,指的是低速反馈现象[6]。
在系统平衡态演变过程中,存在负反馈现象。负反馈不但延缓了系统到达新平衡态的时间,同时也 影响着系统新平衡态的状态。对于一些简单的系统,其平衡态演变过程可以用简化的数学模型表达出来。
参考文献
[1] 钟永光, 贾晓菁, 钱颖. 系统动力学[M]. 第 2 版. 北京: 科学出版社, 2018: 103-107. [2] 胡斌. 电子线路轻松入门[M]. 第 2 版. 北京: 人民邮电出版社, 2006: 287. [3] 冯军, 谢嘉奎. 电子线路(线性部分) [M]. 第 5 版. 北京: 高等教育出版社, 2010: 292-318. [4] 同济大学数学教研室. 高等数学(下册) [M]. 第 2 版. 北京: 高等教育出版社, 1982: 315-316. [5] 赵凯华, 陈熙谋. 电磁学[M]. 第 2 版. 北京: 高等教育出版社, 2006: 209. [6] 包景东, 等. 从简化模型中悟出质点动力学的真谛[J]. 大学物理, 2017, 36(3): 1-4.