倒立摆系统滑模自适应控制
毕业设计一阶倒立摆的自适应滑模控制仿真研究
(二○○七年六月本科毕业设计说明书 题 目:一阶倒立摆的自适应滑模控制仿真研究 学生姓名:xx 学 院:xx 系 别:xx 专 业:xx 班 级:xx 指导教师:xx摘要倒立摆系统是一种非线性、高阶次、多变量、快速和自然不稳定的动态系统,是研究各种控制理论和方法的理想对象及典型试验装置。
在控制过程中能有效地反映诸如可镇定性、鲁棒性、随动性以及跟踪等许多控制中的关键问题。
因此,倒立摆机理的研究又具有重要的应用价值,成为控制理论中经久不衰的研究课题。
本文以一阶倒立摆系统为研究对象,研究其自适应滑模控制策略。
主要完成了以下工作:(1)利用动力学方程建立一阶倒立摆的数学模型,得出描述系统的微分方程。
(2)基于滑模变结构控制、模糊控制和自适应控制设计一阶倒立摆的自适应模糊滑模控制器,并对其进行了李雅普诺夫稳定性分析。
(3)在MATLAB/SIMULINK环境下,针对位置信号为正弦波和方波两种情况进行了该自适应模糊滑模控制器仿真研究。
仿真表明,控制效果良好。
尽管本文做了许多工作,但由于时间关系仅进行了仿真研究而未进行实物控制,有待于进一步实现。
关键词:滑动模态;变结构控制;模糊控制;倒立摆系统;李雅普诺夫函数AbstractInverted Pendulum, which is a dynamic system with nonlinearity, high equation orders, multivariable, fast reaction and instinct instability, has become an ideal object and typical experiment technique. Many key matters can be effectively reflected during the control process, such as steady, robustness, stochastic and track issues. Therefore, the research of inverted pendulum mechanism has lasted for many years due to its significant application value and has become an unfailing research task in the field of control theory.The paper uses the single inverted pendulum system as a research object to research its adaptive sliding mode fuzzy control strategy. The main research works are as follows:(1) We use dynamics equation to build the mathematical model of the single inverted pendulum and the differential equations describing the inverted pendulum are given.(2) Based on the principle of fuzzy control, sliding mode variable control and adaptive control, an adaptive sliding mode fuzzy controller for the single inverted pendulum is designed and its stability is analyzed by Lyapunov theorem of stability.(3) Aimed at the things of sine wave or square wave being position signal, we respectively simulated for the indirect adaptive fuzzy controller under MATLAB/SIMULINK environment and good simulation results are obtained.Though a lot of research work have been done in this paper, there are still many things to do such as single inverted pendulum’s real control.Key words:Sliding Mode ;Variable Structure Control ;Fuzzy Control;Inverted Pendulum System; Lyapunov theorem of stability.目录引言 (1)第一章概述 (2)1.1 倒立摆系统研究的意义 (2)1.2 滑模变结构控制 (2)1.3 倒立摆控制的发展及研究现状 (4)1.3.1 倒立摆控制的发展 (4)1.3.2 倒立摆的研究现状 (6)1.4 本文主要工作 (6)第二章一阶倒立摆的数学模型 (8)2.1 倒立摆系统的组成 (8)2.2 倒立摆工作原理 (8)2.3 倒立摆模型的数学建模 (9)第三章自适应滑模变结构控制理论基础 (11)3.1 滑模变结构理论的起源和背景 (11)3.2 滑模控制的基本概念及原理 (13)3.2.1 滑动模态的定义 (13)3.2.2滑模变结构控制的定义 (14)3.2.3滑动模态的数学表达 (14)3.2.4滑动模态存在和到达条件 (15)3.2.5滑动模态的不变性 (16)3.2.6滑模变结构控制系统的抖振问题 (18)3.3 模糊控制的原理 (18)3.4 李雅普诺夫稳定性分析 (22)第四章一阶倒立摆自适应滑模控制器设计与仿真 (24)4.1 自适应滑模控制器设计 (24)4.2 自控制算法设计及稳定性分析 (26)4.3 仿真研究 (28)4.3.1 S函数 (28)4.3.2 被控对象S函数程序设计 (28)4.3.3 控制器S函数程序设计 (29)4.3.4 作图程序设计 (30)4.3.5 Simulink主程序设计 (31)4.3.6 仿真研究 (32)结论 (35)1、工作总结 (35)2、研究展望 (35)参考文献 (37)附录A 位置信号为正弦波时有扰动的仿真程序 (38)附录B 位置信号为正弦波时无扰动的仿真程序 (44)附录C 位置信号为方波时的仿真程序 (46)谢辞 (52)引言杂技顶杆表演之所以为人们所熟悉,不仅是其技艺的精湛引人入胜,更重要的是其物理本质与控制系统的稳定性密切相关。
台式倒立摆的滑模控制实验报告

倒立摆的滑模控制摘要:倒立摆系统的控制问题一直是控制研究中的典型问题,由于控制系统是非线性的,不能运用传统线性理论的方法来对其进行控制,本文运用了两种方式设计了滑模控制器对台式倒立摆进行控制,并进行了仿真实验,结果显示运用此方法的倒立摆系统具有更好的稳定性以及抗干扰能力。
1 引言滑模控制(sliding mode control, SMC) 也叫变结构控制,本质上是一类特殊的非线性控制,且非线性表现为控制的不连续性。
这种控制策略与其他控制的不同之处在于系统的“结构”并不固定,而是可以在动态过程中,根据系统当前的状态 (如偏差及其各阶导数等)有目的地不断变化,迫使系统按照预定“滑动模态” 的状态轨迹运动。
由于滑动模态可以进行设计且与对象参数及扰动无关,这就使得滑模控制具有快速响应、对应参数变化及扰动不灵敏、无需系统在线辨识、物理实现简单等优点。
变结构控制是前苏联学者Emeleyanov、UtItkin 在20 世纪50 年代初提出的一种控制概念。
滑模变结构式变结构控制的一种控制策略。
这种策略与常规控制的根本不同在于控制的不连续性,即一种使系统“结构” 随着时间的变化的开关特性。
该控制特性可以迫使系统在一定特性下沿着规定的轨迹状态做小幅度高频率的上下浮动,即所谓的“滑模”状态。
滑模控制的优点是能够克服系统的不确定性, 对干扰和未建模动态具有很强的鲁棒性,尤其是对非线性系统的控制具有良好的控制效果。
近年来,滑模变结构方法因其所具有的优良特性而受到越来越多的重视.该方法通过自行设计所需的滑模面和等效控制律,能快速响应输入的变换,而对参数变换和扰动不敏感,具有很好的鲁棒性,且物理制作简单.但大多数采用滑模变结构方法的控制系统没采用联合滑模观测和滑模控制的思想进行鲁棒方案的设计。
滑模变结构控制逐渐引起了学者们的重视,其最大优点是滑动模态对加在系统上的干扰和系统的摄动具有完全的自适应性,而且系统状态一旦进入滑模运动,便快速地收敛到控制目标,为时滞系统、不确定性系统的鲁棒性设计提供了一种有效途径,但其最大的问题是系统控制器的输出具有抖动本文运用常值切换控制以及比例切换控制两种方式设计滑膜控制器对一级台车式倒立摆模型进行分析和建立数学模型, 对小车的位置控制问题、摆角度控制 问题和控制器的输出进行分析。
平面倒立摆自适应滑模模糊控制

图 1 平面倒立摆实物和建模示意图
用来驱动平面倒立摆基座小车的伺服电机有位 置 、速度和力矩 3 种控制模式. 在实际过程中 , 由于 小车与导轨之间的黏滞阻力以及小车的质量难以精 确测量或时变等因素 , 很难在位置控制和力矩控制 模式下设计控制器. 因此 ,平面倒立摆的驱动电机采 用速度控制模式 , 由伺服电机保证小车在一定的时 间段内以恒定的加速度向一个很大的速度目标值加 速 ,而施加到基座小车上的力则由电机的底层控制 算法进行解算. 2. 2 平面倒立摆的动力学模型
3φl x sφy cφy + 3 gsφy cφx ) / (c2φx + 3) l. (3)
2. 3 平面倒立摆动力学模型的线性化解耦
取摆杆平衡位置时各变量的初值为零 ,记
Xe = ( x ,φx , x ,φx , y ,φy , y ,φy , ¨x , ¨y) T =
(0 ,0 ,0 ,0 ,0 ,0 ,0 ,0 ,0 ,0) T .
方程组 :
φ¨x = f 1 =
( - 3 ¨xcφx cφy + 6 φl xφy sφy cφy -
φl 2y sφx cφx + 3 gsφx cφy ) / (c2φy + 3) l ,
(2)
φ¨y = f 2 =
(3 ¨x sφx sφy - 3 ¨ycφy + 2φl xφy sφx cφy +
d 5L
dt
·
5θx
-
5L 5θx
= 0,
d 5L
自适应模糊滑模控制器在一级倒立摆系统中的应用
架 ,然后采用 自 适应模糊逻辑系统代替控制器中的 未知系统动态特性 , 给出了参数的 自适应律并证 明
了此 方法 的可行 稳定 性 。
1 系统描 述
其中, e = x d -x = [ e e …e ( n ) ] , k 一, k f n — l 】 满 足霍
尔伍兹 多项 式条件 。 将 模糊控 制律设 计 为 :
2 . 1 基 本 的模 糊 系统[ 3 1 设模 糊 系统 由 I F . T HE N形 式 的模 糊规 则构 成 :
J ) : I F X 1 i s A{ a n d… a n dX i s T H E NY i s
当f 和g 、 d 未知时 , 控制率式不适用。 采用模糊
( 1 8 )
图三 模糊输出隶属函数图
g s i n x l 一
,,
c o s s i n x l / ( m 。 + )
。
、
定义切换函数 s ( t ) 的隶属函数为:
脚L 1I 一 , I , ' 、 、
A J - t 1 ’ ‘
( 1 9 )
d ( t ) + 一 ( ) ]
,
) = ∽, , )
,
.
、
y ( x ) = e 1 1 5( X )
其中, 0= [ y 一, 。 毛( x ) g - - ( x ) , …, 毛( x ) 】
( 4 )
=
) , h ( x , l O A=
/ I , + l
f 【 4 / 3 一 c o s
+ ) 】
( ) p (S 2 )
_
其中 , x 和x z 分 别 为 摆 角 和 摆 速。 倒 立 摆 系 筝
三级倒立摆系统基于滑模的鲁棒控制

级倒立摆系统的研究不但可以验证各种控制方法的 有 效性 L 还能够 揭 示 许 多 在 工 业 应 用 及 机 器 人 系 统 中存在的问题 L 如系统的非线性特性 L 执行器的饱和 现象L 传感器具 有 标 定 误 差 现 象 以 及 系 统 中 某 些 物 理 变量带有的约 束 条 件 等 @ 因此对倒立摆系统进行 控制研究具有重要的理论意义和工业应用价值 @
BT . Z \ ] ‘ b ^ ] 2 35 8 3 , : 3 SR 3 S + / + M 5 9.M3 > 2 . 5 > . /5 S 3 . / 5 P . : 5 * - /2 5 > 2R * 9 3 9. -5 : 3 , 3 9 : 5 6. SS 5 0 0 5 > + / :
C 7 发 和 研 究 都 具 有 非 常 重 要 的 意 义6 另外通过对三 @
@ : , 5 R / 35 8 3 , : 3 SR 3 S + / + M 9 ; 9 : 3 M . SN 3 3 R 9: 2 39 ; 9 : 3 M 5 -: 2 39 / 5 S 5 6 M* S 39 + , 0 . > 30 , * M 5 5 : 5 . /: 5 M3
三级倒立摆系统是一个复杂的高度不稳定的高阶非线性机械系统由于它在结构上类似于人的单足站立对它的控制研究以及对两足机器人的开发和研究都具有非常重要的意义6c7另外通过对三级倒立摆系统的研究不但可以验证各种控制方法的有效性还能够揭示许多在工业应用及机器人系统中存在的问题执行器的饱和现象传感器具有标定误差现象以及系统中某些物理变量带有的约束条件等因此对倒立摆系统进行控制研究具有重要的理论意义和工业应用价值对一级倒立摆系统和二级倒立摆系统进行了广泛的研究取得了许多好的控制效果67对一个具有两个驱动电机的三级倒立摆系统进行了控制研究其中一个电机固定于底座上并通过其转轴联接下摆与底座使得下摆相对于底座只能进行转动另一个驱动电机则安装在上摆与中间摆之间来驱动上摆的运动还分别在每个摆上固定一个横杆来增加摆的转动惯量以使系统更容易控制所研究的三级倒立摆系统也具有两个驱动电机但其下摆与底座是通过一个可沿底座上的导轨移动的小车来联接的两个电机一个用来驱动小车一方面为上摆与中间摆提供驱动力矩
单级倒立摆三种控制方法的对比研究

单级倒立摆三种控制方法的对比研究一、本文概述倒立摆系统作为经典的控制理论实验平台,被广泛用于研究和验证各种控制算法的有效性。
单级倒立摆作为倒立摆系统中最简单的形式,其动态特性和控制难度适中,成为了许多学者研究的焦点。
本文将重点探讨三种常见的单级倒立摆控制方法,并通过对比分析,揭示各方法的优缺点以及在不同场景下的适用性。
本文将简要介绍单级倒立摆的基本结构和动力学特性,为后续控制方法的研究奠定基础。
随后,将详细介绍三种控制方法:PID控制、模糊控制和最优控制,并阐述各自的基本原理和实现过程。
在此基础上,本文将通过仿真实验和实物实验,对比三种控制方法在单级倒立摆稳定控制中的表现,评估其控制精度、响应速度和鲁棒性等方面的性能。
通过本文的研究,旨在为倒立摆控制领域的研究者提供有益的参考,并为实际工程应用中的控制策略选择提供理论支持。
也希望本文的研究能够推动倒立摆控制技术的发展,为智能控制领域的发展做出一定的贡献。
二、单级倒立摆系统概述单级倒立摆系统是一种典型的非线性、不稳定、不可控系统,是控制理论研究和教学实验中常用的典型实验对象。
该系统由一个支点、一个摆杆和一个小球组成,摆杆一端通过支点与地面相连,另一端固定一个小球。
小球受到重力作用,会自然下垂,而摆杆则可以在垂直平面内自由摆动。
当系统受到外部扰动时,小球会偏离平衡点,导致摆杆摆动,系统变得不稳定。
单级倒立摆系统的控制目标是通过施加一定的控制力,使小球能够稳定地倒立在摆杆顶端,即保持系统平衡。
由于该系统具有非线性、不稳定和不可控等特性,控制难度较大。
为了实现这一控制目标,需要设计合适的控制器,并采用合适的控制策略。
在单级倒立摆系统的控制中,常用的控制方法包括PID控制、模糊控制、神经网络控制等。
PID控制是一种基于误差反馈的控制方法,通过不断调整控制量来减小误差,使系统达到稳定状态。
模糊控制则是一种基于模糊逻辑的控制方法,通过模糊化输入和输出变量,实现对系统的非线性控制。
模糊趋近率的滑模控制在倒立摆系统中的应用研究

控 制 理 论 与 应 用
Con rlT o yan pl a i s to he r d Ap i t c on
模糊 趋 近 率 的滑模 控 制在倒 立摆 系统
中的应 用研 究
谢慕君 . 王 辉
( 长春 工业大学 电气 与 电子工程学 院 , 吉林 长春 1 0 1 ) 3 0 2
杆 质 心 的 距 离 、摆 杆 2 转 动 中心 到杆 质心 的距 离 ; Oi 1’ 分别表 示连杆 与水 平轴 的夹角 、摆杆 1与垂 i:,3 ( 2)
直 向上方 向的 夹角 、摆 杆 2与垂 直 向上 方 向的夹角 。 采用 拉格 朗 日方法 推 导旋转 二 级倒立 摆 动力学 方 程【 ̄ 。拉格 朗 日方程为 : 3引
Lq毒 =Tq ) V q4 (,) (, 一 (,) ( 1 )
为 了克服 常规滑模 变结构控 制存 在 的抖 振 , 许多学
者提出模糊滑模控制【 引 。本文采用模糊指数趋 近律 来
综合滑模控制系统 , 以极点配置 为基础设计 了一种模糊 自适应调整趋近率 的滑模控制器 , 现了旋转二级 倒立 实
摘
要: 采 L g a g 函数建立了旋转二级倒立摆系统的状态空问方程 。为了解决常规滑模控制的抖振 问题 , 出 _一种 以极点配 a rn e 提 『 置为基础的模糊趋近律滑模控制策略。 将模糊逻辑控制 与趋近律相结合 , 推导 l模糊趋近律 。 叶 『 仿真结果表 叫, 该方法 不仅保留 了滑模控制系统具有 的较慢的鲁棒性 , 同时改善了控制 系统滑动模态的品质 , 消除了系统的抖振。
X EMujn WA GHu I - , N u i
( h o f lcrnca dE etia n ier gC a g h nUnv ri f eh oo y C a gh n1 0 1 hn ) S o l eto i n lcr l gn ei ,h n c u iest o c n lg , h c u 3 0 2C ia oE c E n y T n
二级倒立摆的多模型自适应控制
二
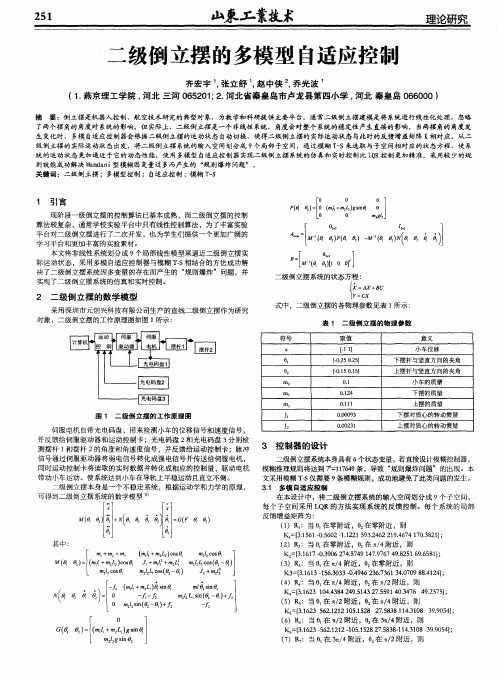
1 引言
现阶段一级倒立摆的控制算法 已基本成熟 ,而二级倒立摆 的控 制 算法较 复杂 ,通常学校实验平 台中只有线性 控制算法 ,为 了丰富 实验 平 台对二级倒立摆进行 了二次 开发 ,也为学生们提供一个更 加广阔的 学习平台和更加丰富的实验素材。 本文将非线性 系统 划分成 9 个局 部线性模型来逼近二级 倒立 摆实 际运动状态 ,采用 多模 自适应控制器 与模糊 T — S 相结合 的方法成功解 决了二级倒立摆 系统因多变量的存在而产生 的 “ 规 则爆炸 问题 ,并 实现了二级倒立摆系统的仿真和实时控制。
l 0
J D 岛 ) = f 0
l 0
,
1
I M 一 - ( ) P ( 岛 ) - M ( 岛 ) Ⅳ ( 毒 反 ) j
0 1 }
) 【 1 0 o l J
二级倒立摆系统 的状态方程 :
f ; + B U
【 Y =C X
『 1 + 聊 2 + m 3 ( m , l I + 2 L 2 ) c o s O  ̄ ( 岛 ) = I ( ^ + £ ) c o s O , +
2 7 2 c o s 0  ̄ ] 厶 c o s ( O  ̄ ~ ) }
K2 : 【 3 . 1 6 1 7— 0 . 3 9 0 6 2 7 4 . 5 7 4 9 1 4 7 . 9 7 6 7 4 9 . 8 2 5 1 6 9 . 6 5 8 1 ] ;
意义 小 车位移
பைடு நூலகம்
0 ^兰 O J 塑 堑 J
g S
n
0 1 0 2 m o
m 1 m 2
O . 2 5 O . 2 5 1 [ - 0 . 1 5 0 . 1 5 1 O . 1
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
倒立摆系统的自适应滑模控制方法研究学生姓名:刘家坤指导教师:郝立颖(讲师)专业名称:自动化所在学院:信息工程学院2014年6月目录摘要................................................................................................................................ I I Abstract ......................................................................................................................... I II 第一章前言 (1)1.1 课题的研究目的及意义 (1)1.2课题的发展以及研究现状 (1)1.3存在问题与解决方法 (1)1.4论文的内容安排 (2)第二章倒立摆系统 (3)2.1倒立摆系统的的研究背景 (3)2.2倒立摆系统的组成 (3)2.3倒立摆系统的原理 (5)2.4倒立摆的建模与受力分析 (6)第三章滑模控制理论 (9)3.1滑模控制的发展及背景 (9)3.2滑模控制的研究方法与基本原理 (9)3.3滑模面的设计 (11)3.4消除抖振的方法 (12)第四章自适应控制理论 (15)4.1自适应控制的背景 (15)4.2自适应控制的基本原理 (15)4.3系统稳定性研究 (16)第五章倒立摆的自适应滑模控制设计与仿真 (18)5.1建立倒立摆系统动态方程 (18)5.2自适应滑模控制器的设计 (19)5.3对倒立摆系统进行仿真 (20)5.4仿真实例研究 (20)5.5仿真结果图的分析 (23)第六章结论 (26)6.1.总结分析 (26)6.2研究展望 (26)致谢 (27)参考文献 (28)附录 (29)1.主程序为 (29)2.子程序为 (30)摘要倒立摆作为一种非线性、多变量而且不稳定的系统,无论是在航空航天领域还是在工业生产中都被广泛应用。
随着现在科技的不断发展,对倒立摆系统控制方法的研究也变得越来越重要。
在本文中,以倒立摆系统为对象,主要用自适应滑模控制的方法对其进行研究。
在控制过程中,自适应控制和滑模控制的优点是能够消除被控对象的不确定性, 对扰动包含较好的鲁棒性。
但非线性的系统难免会产生抖振,而引用自适应控制方法也可以很好的削弱抖振,并应用到系统中。
对倒立摆系统做数学建模处理,描绘出系统的状态方程。
然后基于自适应和滑模控制方法设计出倒立摆的自适应滑模控制器并对其进行稳定性分析。
最后用MATLAB仿真软件进行仿真研究,得出良好的实验结果。
关键词:倒立摆系统,自适应控制,滑模控制,鲁棒性,抖振AbstractInverted pendulum as a nonlinear, multivariable and unstable system, whether or have been widely used in the aerospace field in industrial production. With the continuous development of technology now,Inverted pendulum system control method of research is becoming increasingly important. In this article, object to the inverted pendulum system, the main method of adaptive sliding mode control its research. In the control process, advantages of adaptive control and sliding mode control system is able to overcome the uncertainty, interference with robustness. However, the system will inevitably produce nonlinear buffeting, The method can also be a reference adaptive control well weaken chattering, and applied to the system Inverted pendulum system mathematical modeling, differential equations describe the system. Then sliding mode control method based on adaptive and adaptive sliding mode controller is designed inverted pendulum and its stability analysis. Finally, simulation studies using MA TLAB simulation software, Finally, simulation studies using MA TLAB simulation software, and draw good results.Keyword:Inverted pendulum system, Adaptive Control, Sliding Mode Control, Robustness, Buffeting第一章前言1.1 课题的研究目的及意义随着当下科学的飞速发展,各个国家的学者对控制理论的研究也不断深入,导致现在自动化程度也是不断的提升,无论是国防军事、航空技术还是工业生产都是十分依赖控制要求的,自从倒立摆系统被提出以来,在控制领域该方法就有了的一席之地。
在日常生活中,倒立摆系统可以看成是重心在上的物体的抽象模型,由于其自身是不稳定的,所以能反映许多在控制过程中所遇到的问题,因此,倒立摆控制系统可作为理论研究中的很好的实验手段。
除了以上方面外其在工业生产中也解决了许多关键性的问题。
例如研究机器人在行走时对机器膝关节和肘关节的控制、卫星启动过程中的对垂直方向上的高度控制还有起重机吊钩平衡装置的控制等等,这些在实际所常见的控制应用都利用了倒立摆系统的知识。
所以说,对倒立摆控制方法的深入讨论就有着特殊的意义。
1.2课题的发展以及研究现状倒立摆这个概念是于上个世纪五十年代后期被提出的,最初是麻省理工大学控制理论学教授根据火箭的启动推进装置的原理研究出了一个简单的单阶倒立摆的实验装置。
而它作为一个不稳定而且非线性的系统被正式提出是在1969年,当时国外学者利用倒立摆的装置的实验平台提出了多种控制算法,比如用滑模控制等有关的的方法对倒立摆进行控制,设计出类如模糊系统或是自适应滑模控制器来进行输入输出的对比等。
在我国,是从三十多年以前才着手于对倒立摆这方面的研究的,虽然对于其它国家起步稍晚,但是发展却是很快的,从80年代后期完成了一级、二级倒立摆在倾斜面轨道上的控制开始,到九十年代后期利用反馈原理设计出了反馈控制器对倒立摆进行了仿真控制,再到2003年我国已经可以独立设计出高阶的、非常复杂的倒立摆系统了。
由此可以证明,国内对这方面的技术已经步入了世界上最尖端领域。
1.3存在问题与解决方法在本文中我们主要利用滑摸控制和自适应控制来研究倒立摆系统,自适应控制可以看作是一个能根据系统的不断变化而智能调节自身特性来使系统能够达到最优的状态。
滑模控制则是随着系统的变化而不断改变控制器结构的控制方法,目前国内外对滑模控制的研究主要就是集中在滑模面设计、抑制抖振的研究和与其他控制方法相结合这三个方面上。
因为倒立摆系统是比较复杂且不稳定的的,所以在控制中就会有存在外部干扰的问题,如空气阻力、小车与轨道的摩擦力、参数的误差等。
而自适应控制和滑模控制的自身特性是可以削减和解决这些因素的,因此,我通过设计自适应滑模控制器来对倒立摆来进行稳定性控制。
1.4论文的内容安排本篇论文是在查阅相关文献资料掌握了国内外有关滑模控制和自适应控制的结论的同时,将上述两种方法有机的结合在一起后,在倒立摆系统中就可作为处理问题的方法,并对倒立摆系统做合理的数学建模处理,在拟定好参数后对系统进行仿真分析,得出较好的输出图形。
具体步骤如下:①第一章主要介绍了倒立摆的研究背景、滑模控制和自适应控制的发展历程和现状、在研究过程当中所产生的问题以及解决问题方法的简单介绍。
并对论文的上下内容顺序做出简单的安排。
②第二章介绍了倒立摆的组成和具体的工作原理,通过对倒立摆可运行条件分析、计算后建立了数学模型。
最后对所用到的所有控制量进行说明,基于牛顿等基础原理推导出倒立摆系统的动态微分方程。
③第三章具体阐述了自适应控制方法和滑模控制方法大体原理和概念,查阅文献分析出滑模控制方法中的到达条件、产生抖振的原因,滑模面设计等重要组成部分,并用李雅谱诺夫函数判据了本系统稳定性。
④第四章将滑模与自适应控制的方法采用特殊的形式结合,得出自适应滑模控制这一理念,并将其应用到倒立摆中,再进行仿真研究,得出想要的结果。
⑤最后为对本篇论文的内容做出总结并对该研究课题未来的前景做出展望。
第二章倒立摆系统2.1倒立摆系统的的研究背景自从倒立摆系统的这一概念被提出来后学者专家们就将其定义成了一个多变量、高阶次、不稳定而且比较复杂的非线性的系统,在实际的生产或是理论应用中许多抽象的、建模困难的概念都是可以通过进行有关倒立摆实验从而较为直观的表达出来的,一直以来,倒立摆系统在进行控制理论实验研究时经常被作为实验的平台,所以就有很多学者专家们致力于对倒立摆的研究中。
自上世纪五十年代至今对于倒立摆系统的发展进步的很快,如今已出现了数十种形式的倒立摆被用来解决实际当中所遇到的不同的问题,例如:单行道小车型倒立摆、双排并列式倒立摆、斜面倒立摆等等。
目前,随着科技的日益进步,一个国家科技的发达程度已经成为了衡量国力的标准。
而无论是航空航天领域、工程技术方面还是日常生活中都会出现许多有关于倒立摆的问题,由此可见,对它的研究是非常有价值的。
随着现在倒立摆的种类在不断增加而且对于研究倒立摆的技术要求的也更加的严格,同时,也就有更多更好的方法被提出来,比如智能控制、模糊控制、神经网络控制、PID控制等。
但是无论选用哪种控制方法,都是需要建立出一个精确的数学模型以便于设计与研究。
由于倒立摆系统是比较复杂的、也是有较多扰动的,所以要对其建模是有一定难度的,对于这种情况,就需要有一种针对无法建模和扰动较多系统的方法。