机器人学第二章(数学基础)
【管理资料】机器人学基础-第2章-数学基础-蔡自兴汇编

沿{A}的yA轴移动6单位。求位置矢量ApB0和旋转矩阵
A B
R
。
假设点p在坐标系{B}的描述为Bp=[3,7,0]T,求它在坐标系
{A}中的描述Ap。
yB
yC
解: 1 2
A
p B0
6
yA
0
{A}
{B} Ap ApBo
Bp oB
xB xC
oA
xA
zC zB
zA
2.2 Coordinate Transformation
0 0 1 0 0 1xC
oB
{A}
ApBo
oA
xA
zC zB
zA
2.2 Coordinate Transformation
12
2.2 Coordinate Transformation
例2.1 已知坐标系{B}的初始位姿与{A}重合,首先{B}相对
于坐标系{A}的zA轴转30°,再沿{A}的xA轴移动12单位,并
Ch.2 Mathematical Foundations
6
2.2 Coordinate Transformation 坐标变换
平移坐标变换 (Translation Transform)
ApBpApBo
zB { B }
(2.10)
zA { A } oA
Ap
Bp
oB
yB
ApBo
yA
xB
xA
图 2.3平 移 变 换
2.2 Coordinate Transformation
7
2.2 Coordinate Transformation
旋转坐标变换 (Rotation Transform)
机器人学—数学基础—齐次坐标和齐次变换

列矩阵 x
a= x
y
, b=
z
, c=
,w为比例系数
w
w
w
V
y z
x
y
z
w T
显然,齐次坐标表达并不是唯一的,随
w
w值的不同而不同。在计算机图学中,w
作为通用比例因子,它可取任意正值,但
在机器人的运动分析中,总是取w=1 。
[例]:
V3 i4j5 k
可以表示为: V=[3 4 5 1]T
或 V=[6 8 10 2]T 或 V=[-12 -16 -20 -4]T
• 具有直观的几何意义 • 能表达动力学、计算机视觉和比例变换问题 • 其数学基础即是齐次变换
2.2 点和面的齐次坐标
2.2.1 点的齐次坐标
• 一般来说,n维空间的齐次坐标表示是一个(n+1)维空间 实体。有一个特定的投影附加于n维空间,也可以把它看作 一个附加于每个矢量的特定坐标—比例系数。
v a i b j c k 式中i, j, k为x, y, z 轴上的单位矢量,
0 0
10
10 1020 0
1
1
0
0 0 1 10 1 0
2 1
0
0 0 1 -10 -1 0
0 1
与点矢 0 0 0 0T相仿,平面 0 0 0 0也没有意义
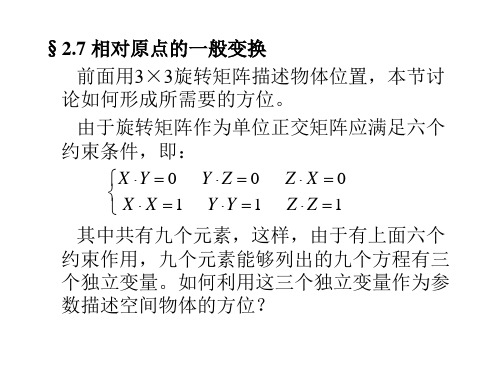
2.2 旋转矩阵及旋转齐次变换
2.2.1 旋转矩阵
设固定参考坐标系直角坐标为ΣOxyz,动坐标系为ΣO´uvw, 研究旋转变换情况。
解2:用分步计算的方法
① R(x, 90°)
1 0 0 01 1
P' 0 0 -1 02 3 0 1 0 03 2
工业机器人课程教学大纲
工业机器人课程教学大纲《工业机器人》课程教学大纲一(课程的性质与任务课程性质:本课程综合介绍了机器人技术,设计思想和发展趋势主要任务:本课程是要求学生通过学习、课堂教育,能了解机器人发展的最新技术与现状;初步掌握机器人技术的基本知识。
二(课时分配序号课题小计讲课实验机动一绪言 2 2 二机器人学的数学基础 4 4 三机器人运动方程的表示与求解 8 8 四机器人动力学 6 6机器人的控制五 4 4 六机器人学的现状、未来 2 2合计 28 26 2三(课程教学内容第一章绪言简述机器人学的起源与发展,讨论机器人学的定义,分析机器人的特点、结构与分类。
第二章机器人学的数学基础空间任意点的位置和姿态变换、坐标变换、齐次坐标变换、物体的变换和逆变换,以及通用旋转变换等。
第三章机器人运动方程的表示与求解机械手运动姿态、方向角、运动位置和坐标的运动方程以及连杆变换矩阵的表示,欧拉变换、滚-仰-偏变换和球面变换等求解方法,机器人微分运动及其雅可比矩阵等第四章机器人动力学机器人动力学方程、动态特性和静态特性;着重分析机械手动力学方程的两种求法,即拉格朗日功能平衡法和牛顿-欧拉动态平衡法;然后总结出建立拉格朗日方程的步骤第五章机器人的控制机器人控制与规划第六章机器人学的现状、未来包括国内外机器人技术和市场的发展现状和预测、21世纪机器人技术的发展趋势、我国新世纪机器人学的发展战略等。
不同类型机器人的研究发展状况等。
四(教学的基本要求采用启发式教学,培养学生思考问题、分析问题、解决问题的能力;理论以够用为度,且从应用的角度,尽量简化定量分析。
五(建议教材与教学参考书1、机器人学、蔡自兴、清华大学出版社、20002、机器人学导论,约翰J.克雷格、西北工业大学出版社、1987 六(说明1( 本课程的教学原则上须由一定工作经验的讲师及讲师以上的教师担任,以保证理论知识和实践操作技能教学的需要。
2( 本课程适用于高职数控技术应用、机电一体化、机电工程及自动化、机械工程与自动化等专业。
第二章 机器人技术数学基础 51页 4.0M

3.齐次坐标的逆变换 nx ox 一般,若
n T y nz 0 nx o x a x 0 oy oz 0 ny oy ay 0 ax ay az 0 nz oz az 0 px py pz 1 p n p o p a 1
2.4 物体的变换及 逆变换
1.物体位置描述 物体可以由固定于 其自身坐标系上的若干 特征点描述。物体的变 换也可通过这些特征点 的变换获得。
Robotics 数学基础
2.4 物体的变换及逆变换
1.物体位置描述
T Trans(4,0,0) Rot( y,90 ) Rot( z ,90 ) 0 1 0 0
将上式增广为齐次式:
1 0 R ( x, ) 0 0 0 c 0 c s 0 R ( y , ) s s c 0 0 0 1 0 0 0 0 s 0 c s s c 1 0 0 R ( z , ) 0 0 0 c 0 0 0 1 0 0 0 0 0 0 1 0 0 1
4 1 0 0 0 0 1 1 6 6 1 0 1 1 0 1
Robotics 数学基础
2.4 物体的变换及逆变换
2.齐次坐标的复合变换 {B}相对于{A}: ABT; {C}相对于{B}: BCT; 则{C}相对于{A}: A T A T B T C B C
第2章 机器人运动学—数学基础[可打印版,含习题]
![第2章 机器人运动学—数学基础[可打印版,含习题]](https://img.taocdn.com/s3/m/c5aed3c4a1c7aa00b52acbd8.png)
式(2-20)和式(2-21)无论在形式上,还是在结果上都是 一致的。因此我们有如下的结论:
动坐标系在固定坐标系中的齐次变换有2种情况:
定义1:如果所有的变换都是相对于固定坐标系中各坐标轴旋 转或平移,则依次左乘,称为绝对变换。
H
=
Trans
(a
b
c)
=
⎢⎢0 ⎢0
1 0
0 1
b⎥⎥ c⎥
⎢⎣0 0 0 1⎥⎦
w′
o′ v′
u′
b
a
注意:平移矩阵间可以交换,
x
平移和旋转矩阵间不可以交换
z c
oy
2.2.4 相对变换
举例说明:
例1:动坐标系∑0′起始位置与固定参考坐标系∑0重合,动坐标系 ∑0′做如下运动:①R(Z,90º) ②R(y,90º) ③Trans(4,-3, 7) ,求合成矩阵
反过来: Puvw = R −1 Pxyz
R−1 = R* det R
R∗为R的伴随矩阵,det R为R的行列式,由于R是正交矩阵,
因此R −1 = R T
2.2.2 旋转齐次变换
用齐次坐标变换来表示式(2-7)
⎡Px ⎤ ⎡
0⎤⎡Pu ⎤
⎢⎢Py
⎥ ⎥
=
⎢ ⎢
R
0⎥⎥⎢⎢
Pv
⎥ ⎥
⎢ ⎢ ⎣
Pz 1
• 机器人可以用一个开环关节链来建模
• 由数个驱动器驱动的转动或移动关节串联而成
• 一端固定在基座上,另一端是自由的,安装工具,用以 操纵物体
• 人们感兴趣的是操作机末端执行
n
器相对于固定参考坐标数的空间 几何描述,也就是机器人的运动 学问题
• 机器人的运动学即是研究机器人
机器人2(第二章2)
其中:
kx =
1
3、
ky =
1
kz = 3、
1 3ห้องสมุดไป่ตู้
θ = 120 o 、
二、等效转轴和等效转角 利用旋转变换通式可由给定的转轴和转角求出旋转矩阵 , 其反向问题则是由给定的旋转矩阵求其等效转轴和等效 ⇒ 转角。 前一个问题:等效转轴、转角 ⇒ 旋转矩阵 后一个问题:旋转矩阵 ⇒ 等效转轴、转角 ,为了求出它的等效 对给定的旋转矩阵 R = [n o a ]
又
B
TA−1
0 0 = − 1 0
0 1 4 0 0 1 0 4 = 1 0 0 8 0 0 1 0
−1
∴
0 0 A S = B T A−1 B S = 1 0
0 − 1 8 4 8 1 0 − 4 0 − 4 = 0 0 − 4 0 0 0 0 1 1 1
R(k ,120 ) = Rot ( y,90 ) Rot ( z ,90 )
o o o
§2.9 逆变换
在机器人作业中,经常已知一点在参考 坐标系中的位置,欲求它在新坐标系中的位 置。例如:根据机械手在用户坐标系中的位 置,计算它相对机器人手的位置。为了解决 这个问题,必须要先定义一个新的机械手坐 标系,并且使用一系列坐标变换求出它相对 逆变换 参考坐标系的变化 ⇒
二、园柱坐标(Cylindrical polar coordinates)
Cyl ( Z , ϕ , r ) = Trans (0,0, Z ) Rot ( Z , ϕ )Trans ( r ,0,0)
Cα Sα = 0 0 − Sα Cα 0 0 0 rCα 0 rSα 1 l 0 1
机器人学第二章(数学基础)
第二章数学基础2.1 引言机器人操作手的研究涉及物体之间以及物体与操作手之间的关系。
在这一章中,我们将研究描述这些关系所需的表示方法。
在同样必须描述物体之间关系的计算机制图学领域中,已经解决了类似的表示方法问题。
在该领域以及计算机视觉方面使用了齐次变换。
这些变换以前Denavit用来描述连杆机构。
而现在我们用这些变换来描述操作手。
我们将首先建立向量和平面的符号,再在这些符号基础上引入变换。
这些变换主要由移动和转动所组成。
接着将表明,这些变换也可以作为表示包括操作手在内的物体的坐标架。
然后将引入逆变换。
后一节叙述绕任一向量旋转的一般旋转变换。
再介绍一种算法,以用来找出用任何已知变换表示的等效旋转轴和等效旋转角。
伸张和缩放变换的一小节,连同透视变换一节也包含在本章中。
这一章用一节关于变换方程的内容来作为结尾。
2.2 符号在描述物体间关系时,我们将利用点向量、平面和坐标架。
点向量用小写黑体印刷符号表示,平面用手写体印刷符号表示,坐标架则用大写黑体印刷符号表示。
例如:向量v, xl, x平面∏, Θ坐标架I, A, CONV我们将把点向量、平面和坐标架作为具有关联数值的变量使用。
例如,一个点向量就具有三个笛卡尔坐标分量。
如果希望相对于坐标架E来描述空间一个称为p的点我们将用一个称为v的向量,并将这一向量写成EV前置的上标表示所定义的坐标架。
我们也可以利用向量w相对于例如H这样的不同坐标架,来描述相同的点p为HWv和w是两个很可能具有不同分量的向量,虽然两个向量描述相同的点p,但v≠w。
也可能存在这种情况,用一个向量a来描述在任一坐标架上面3英寸地方的一个点F2a1aF在这一情况中,向量是完全相同的,但是描述了不同的点,通常文中定义的坐标架是明显的,这时上标就不用。
在许多情况中,向量的名称将与被描述的物体的名称相同,例如,销的末端可以用相对于坐标架BASE的向量tip来描述B A SEtip如果文中相对于BASE描述向量是明显的,则我们可以简单地写为tip如果还希望相对于另一坐标架HAND 来描述这一点,则我们必须用另一向量来描述这一关系,例如tv HANDtv HAND和tip 两者描述相同的物件,但有着不同的值。
第二章 机器人数学基础
R3×3 T = O1×3
P3×1 旋转矩阵3×3 = I1×1 O1×3
位置矢量3 ×1 1
若三维空间的位置矢量P表示成齐次坐标,即P=(px py pz 1) T, 那么利用变换矩阵的概念,对纯转动,3 × 3旋转矩阵可扩展成4 × 4 齐次变换矩阵
齐次变换 规定两矢量的点积为一标量
可以类似用 A R 描述{A} 相对于{B}的方位。 A B R 和 B R 都是正交矩阵,两者互逆。根据正交 A 矩阵的性质有:
B A A A R = B R 1 = B RT
B
xA
xB
§ 2.2
三、复合变换
坐标变换
yC yB yA
Ap Ap
Bp
xB xC
坐标系{B} 的原点与{A}的原点既 不重合,两者的方位又不同时,用位 置矢量ApB。描述{B}的坐标原点相对 B 于{A} 的位置,用旋转矩阵 A R 描述 {B}相对于{A} 的方位,则任一点p在 坐标系{A} 和{B}的描述Ap和Bp具有如 和 下变换关系
物体的变换及逆变换
我们可以用描述空间一点的变换方法来描述物体在 空间的位置和方向。例如,图2.8(a)所示物体可由固定该 物体的坐标系内的六个点来表示。我们可对上述楔形物 体的六个点变换如下:
0 1 0 0 0 1 4 1 1 1 0 0 0 0 0 0 1 0 0 0 0 2 0 0 1 1 1 1 1 1 1 4 4 6 0 4 4 1 1 1 = 2 0 0 0 0 0 1 1 1 1 1 1 6 4 4 1 1 1 0 4 4 1 1 1
坐标变换
设坐标系{A} 与{B}具有相同的坐标原点,但 两者的方位不同。 A 用旋转矩阵 描述{B}相对于{A} 的方位。同一点p在两个坐标系{A} BR 和{B}中的描述Ap和Bp具有如下变换关系: 和
机器人学基础_第2章_数学基础
2.3 Homogeneous Transformation
18
2.3 Homogeneous Transformation of the Coordinate Frames
例2.2 已知坐标系{B}的初始位姿与{A}重合,首先{B}相对 于坐标系{A}的zA轴转30°,再沿{A}的xA轴移动12单位,并 沿{A}的yA轴移动6单位。假设点p在坐标系{B}的描述为 Bp=[3,7,0]T,用齐次变换方法求它在坐标系{A}中的描述Ap。
解:
A A BR T yA B 0
yB0.5 0.866 A 0.866 pBo 0.5{ B } 0 0 1 A p 0 0
A
y0 C
oB
12 0 6 1 Bp 0 0 1
xB
xC
{A} oA xA
pBo zC zB
zA
2.3 Homogeneous Transformation
A
p B p ApBo
zB {B}
(2.10)
zA
{A}
A
p oB
B
p yB
A
pBo xB
oA
yA
xA
图2.3 平移变换
2.2 Coordinate Transformation
8
2.2 Coordinate Transformation 旋转坐标变换 (Rotation Transform)
B
yB {B}
yA
{A} xB
z p B xp 0 0
s c 0 0 0 1
sinθ
p
c R ( z , ) s 0
oA
θ
机器人学第二章(数学基础)
微分的几何意义:切线的 纵坐标。
ABCD
计算方法:通过微分公式 或链式法则求得微分。
微分的运算性质:包括线 性性质、乘积性质、商的 微分性质等。
积分
定义
积分是微分的逆运算,即求函数与坐 标轴所夹的面积。
计算方法
通过不定积分和定积分的计算公式求 得积分。
定积分的几何意义
曲线与坐标轴所夹的面积。
定积分的性质
正运动学
正运动学是根据已知的关节参数,计算出机器人末端执行器的位置和 姿态。
逆运动学
逆运动学则是根据目标的位置和姿态,反推出机器人各关节的参数。
雅可比矩阵
雅可比矩阵描述了机器人末端执行器的微小位移与关节角度的微小变 化之间的关系。
动力学
动力学定义
动力学主要研究机器人在运动过程中受 到的力与力矩,以及这些力与力矩如何
随机变量
离散随机变量
随机变量可以取有限或可数无 穷多的值,这种情况下我们称
随机变量为离散随机变量。
连续随机变量
如果随机变量可以取任何实数 值,则称为连续随机变量。
期望值
对于离散随机变量,期望值定 义为E(X)=∑XP(X),对于连续
随机变量,期望值定义为 E(X)=∫XP(X)dX。
统计推断
参数估计04 优化理论 Nhomakorabea线性规划
线性规划是一种数学优化技术,用于找到一组变量的最优值,这些变量受到一组线性等式或不等式的 约束。
线性规划的数学模型通常由目标函数和约束条件组成,目标函数是要求最大或最小的线性函数,约束条 件也是线性等式或不等式。
线性规划问题可以通过使用单纯形法、内点法等算法求解,这些算法可以在有限步内找到最优解或近似 最优解。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
(2-21)
这是因为我们要求条件
(2-22)
在所有变换中不变。为了证实这一点,我们将公式2.20和2.21代入公式2.22的左边。由于 为单位矩阵I,故得
(2-23)
2.6
相应于用向量 表示的移动变换 是
(2-24)
给出向量 ,则得变换后的向量 为
(2-25)
(2-26)
移动也可以解释为两个向量 与 之和。
或 (2-15)
点 将落在这一平面中
(2-16)
或
(2-17)
点 位于平面上面
(2-18)
实际是正数,表明点在平面之外,而在外指法线方向上。点 位于平面之下
(2-19)
平面 是非限定的。
2.5
空间变换 是一个4 4矩阵,能够用来表示移动,转动。伸展和透视变换。给出一点u,它的变换v矩阵乘积表示为
(2-20)
(2-44)
我们应该预料到这一点,因为矩阵相乘是不能交换的。
(2-45)
这一变换结果如图2-3所示.
现在我们将原先的转动与移动 结合起来。我们从公式2-27得到移动,从公式2.41得到转动。矩阵表达式是
(2-46)
且点 变换至 为
(2-47)
其结果如图2-4所示。
2.8坐标架
我们可以把齐次变换的元素理解为描述另一坐标架的四个向量。向量 位于另一坐标架的原点。它的变换是和变换矩阵右边那一列相对应。考虑公式2.47中的变换
2.2
在描述物体间关系时,我们将利用点向量、平面和坐标架。点向量用小写黑体印刷符号表示,平面用手写体印刷符号表示,坐标架则用大写黑体印刷符号表示。例如:
向量v, xl, x
平面,
坐标架I, A, CONV
我们将把点向量、平面和坐标架作为具有关联数值的变量使用。例如,一个点向量就具有三个笛卡尔坐标分量。
一个点向量
(2-1)
式中i,j和k分别是沿x,y和z坐标轴的单位向量。在齐次坐标中用一列矩阵来表示点向量
(2-2)
式中
(2-3)
于是能够把向量 写成 ,或者 ,或者再写成为 等等。上标T指明行向量转置为列向量。在原点处的向量(零向量)被写成 ,式中n是任意非零比例因子, 是非限定向量。形式为 的向量表示无限大向量,并被用来表示方向:加上其它任一有限向量,都不会改变它的大小。
如同点和平面一样,变换矩阵的每个元素,可乘以一非零常数而变换不变。现考虑将矢量 移动,或是与 相加
(2-27)
如果把变换矩阵元素乘以 ,而将向量元素乘以2,我们得到
(2-28)
这和上述向量 一致。点 落在平面 中
(2-29)
正如我们已得到的一样,变换点是 。现在我们来计算变换后的平面。逆变换是
而变换后的平面是
(2-9)
或展开为
(2-10)
如果我们定义一常数
(2-11)
将方程2-10除以 得
(2-12)
方程2-12左边是 和 两向量的点乘,表示点 沿向量 的指向的距离。向量 可被理解为是在法线方向上离原点距离为 的平面的一条外指法线。于是平行于 平面,沿 一个单位的平面 可表示为
(2-13)
或 (2-14)
我们也将使用向量的点乘和叉乘,给出二个向量
(2-4)
我们规定向量点乘用“ ”表示为
(2-5)
二向量的点乘是一个标量。用“ ”标明的叉乘,是垂直于两相乘向量所形成平面的另一向量,用下式表示
(2-6)
这一定义作为行列式展开更易于记忆
(2-7)
2.4
一个平面可以用一个行矩阵来表示
(2-8)
这样,如果点v位于平面中,矩阵乘积
(2-30)
变换后的点再次落在变换后的平面中
(2-31)
2.7
相应于绕 或 轴转过角度 的变换是
(2-32)
(2-33)
(2-34)
让我们用例子来解释这些转动。给出一点 ,将它绕 轴转 至 ,其结果如何?将 和 代入公式2-34,得到变换为
(2-35)
始点和终点如图2-1所示,点确实绕 轴转过 。现在让我们将 绕 轴转 到 。我们可从公式2-33得到变换,有
(2-36)
这一结果如图2-2所示。如果将两个变换结合起来,我们有
(2-37)
和 (2-38)
将公式2-37的 代入公式2-38得
(2-39)
(2-40)
(2-41)
于是
(2-42)
这与我们在前面所得到的一致。
如果我们颠倒转动的次序,首先绕 轴转 ,再绕 轴转 ,我们得到一不同位置
(2-பைடு நூலகம்3)
且点 变换至 为
如果希望相对于坐标架E来描述空间一个称为p的点我们将用一个称为v的向量,并将这一向量写成
前置的上标表示所定义的坐标架。
我们也可以利用向量w相对于例如H这样的不同坐标架,来描述相同的点p为
v和w是两个很可能具有不同分量的向量,虽然两个向量描述相同的点p,但v w。也可能存在这种情况,用一个向量a来描述在任一坐标架上面3英寸地方的一个点
在这一情况中,向量是完全相同的,但是描述了不同的点,通常文中定义的坐标架是明显的,这时上标就不用。在许多情况中,向量的名称将与被描述的物体的名称相同,例如,销的末端可以用相对于坐标架BASE的向量tip来描述
如果文中相对于BASE描述向量是明显的,则我们可以简单地写为
tip
如果还希望相对于另一坐标架HAND来描述这一点,则我们必须用另一向量来描述这一关系,例如
和tip两者描述相同的物件,但有着不同的值。为了涉及到坐标架、向量或平面的每一分量,我们添加下标来表示特定分量。例如,矢量 有分量 , , 。
2.3
在n维空间中物体的齐次坐标表达式是一个(n+1)维空间实体,这样一个特定的透视投影即重新建立了该n维空间。这也可以被视为对每个向量加上一个外加坐标(比例因子)。这样,如果包括比例因子的每个分量乘以一常数,向量含义不变。
我们将首先建立向量和平面的符号,再在这些符号基础上引入变换。这些变换主要由移动和转动所组成。接着将表明,这些变换也可以作为表示包括操作手在内的物体的坐标架。然后将引入逆变换。后一节叙述绕任一向量旋转的一般旋转变换。再介绍一种算法,以用来找出用任何已知变换表示的等效旋转轴和等效旋转角。伸张和缩放变换的一小节,连同透视变换一节也包含在本章中。这一章用一节关于变换方程的内容来作为结尾。
第二章
2.1
机器人操作手的研究涉及物体之间以及物体与操作手之间的关系。在这一章中,我们将研究描述这些关系所需的表示方法。在同样必须描述物体之间关系的计算机制图学领域中,已经解决了类似的表示方法问题。在该领域以及计算机视觉方面使用了齐次变换。这些变换以前Denavit用来描述连杆机构。而现在我们用这些变换来描述操作手。