三维坐标变换
三维空间几何坐标变换矩阵课件

3
缩放变换的应用:在计算机图形学中,缩放变换 常用于物体的形状调整和场景构建。04坐标变源自矩阵推导过程平移变换矩阵推导
平移变换定义
将点$P(x,y,z)$沿$x$轴、$y$轴 、$z$轴分别平移$t_x$、$t_y$、
$t_z$个单位。
平移变换矩阵
$begin{bmatrix} 1 & 0 & 0 & t_x 0 & 1 & 0 & t_y 0 & 0 & 1 & t_z 0 & 0 & 0 & 1 end{bmatrix}$
02
三维空间几何基础
三维空间坐标系
01
02
03
右手坐标系
在三维空间中,通常采用 右手坐标系,其中x轴正 向向右,y轴正向向前,z 轴正向向上。
坐标原点
三维坐标系的原点O是三 个坐标轴的交点,其坐标 为(0,0,0)。
坐标表示
在三维空间中,任意一点 P的位置可以用一个三元 组(x,y,z)来表示,其中x、 y、z分别是点P在x轴、y 轴、z轴上的投影。
|1000|
```
01
03 02
旋转变换原理及方法
| 0 sin(θ) cos(θ) 0 |
|0001|
旋转变换原理及方法
```
旋转变换的应用:在计算机图形学中,旋转变换常用于物体的姿态调整和场景构 建。
缩放变换原理及方法
缩放变换定义
将三维空间中的点沿着某一方向进行放大或缩小,改变点的形状和大小。
平移变换过程
将点$P$的齐次坐标$(x,y,z,1)$与平 移变换矩阵相乘,得到平移后的坐 标$(x+t_x,y+t_y,z+t_z,1)$。
三维空间几何坐标变换矩阵课件

目录
• 三维空间几何坐标变换矩阵概述 • 三维空间几何坐标变换矩阵的构建 • 三维空间几何坐标变换矩阵的实现 • 三维空间几何坐标变换矩阵的优化 • 三维空间几何坐标变换矩阵的案例分析
01
三维空间几何坐标变换 矩阵概述
定义与性质
定义
坐标变换矩阵是用于描述三维空 间中点或向量在不同坐标系之间 转换关系的矩阵。
减少计算量优化
矩阵分解
将复杂的坐标变换矩阵分解为多个简 单的矩阵,降低计算复杂度。
避免重复计算
在坐标变换过程中,避免重复计算相 同的结果,利用存储机制保存中间结采用高精度的算法和数据类型,以减小计算过程中的误差。
迭代优化
通过迭代的方式逐步逼近精确值,提高坐标变换的精度。
减少内存占用优化
压缩存储
对变换矩阵进行压缩存储,减少内存占用。
动态内存分配
根据实际需要动态分配内存,避免不必要的内存浪费。
05
三维空间几何坐标变换 矩阵的案例分析
平移变换矩阵案例分析
平移变换矩阵
将三维空间中的点沿某一方向移动一定距离。
案例
将点A(1,2,3)沿x轴平移2个单位,得到点B的坐标为(3,2,3)。
使用数学软件实现坐标变换矩阵
数学软件如MATLAB、Octave等 提供了强大的矩阵计算功能,可 以进行复杂的数学运算和矩阵操
作。
使用数学软件可以实现复杂的坐 标变换矩阵,并进行精确的计算
和分析。
数学软件还提供了可视化的功能, 可以方便地展示三维坐标变换的
效果。
04
三维空间几何坐标变换 矩阵的优化
02
三维空间几何坐标变换 矩阵的构建
平移变换矩阵
三维坐标系定义

三维坐标系定义三维坐标系是一个由三个互相垂直的坐标轴组成的数学模型。
它在几何学、物理学、计算机图形学等领域中被广泛应用。
本文将从三维坐标系的定义、坐标表示、坐标变换、空间距离等方面进行详细阐述。
一、三维坐标系的定义三维坐标系由三个相互垂直的坐标轴组成,分别为x轴、y轴和z 轴。
通常情况下,我们将x轴水平向右延伸,y轴垂直向上延伸,z 轴垂直向外延伸。
这三个轴相交于原点O,形成了一个立体直角坐标系。
二、坐标表示在三维坐标系中,每个点都可以用一个有序三元组(x,y,z)来表示。
其中,x表示点在x轴上的坐标值,y表示点在y轴上的坐标值,z表示点在z轴上的坐标值。
这三个坐标值可以是正数、负数或零,表示点在各个轴上的位置关系。
三、坐标变换三维坐标系中的坐标变换包括平移、旋转和缩放等操作。
平移是指将点沿着各个轴的正方向移动一定的距离,可以用向量表示。
旋转是指将点绕着某个轴旋转一定的角度,可以用旋转矩阵表示。
缩放是指将点在各个轴上按比例进行拉伸或压缩,可以用缩放因子表示。
通过这些变换操作,我们可以实现对三维物体的位置、形状和大小等属性的改变。
四、空间距离在三维坐标系中,我们可以通过计算两个点之间的空间距离来衡量它们之间的位置关系。
常用的计算方法有欧氏距离和曼哈顿距离。
欧氏距离是指两点之间的直线距离,可以通过勾股定理计算得出。
曼哈顿距离是指两点之间在各个轴上坐标差的绝对值之和。
根据应用场景的不同,我们可以选择适合的距离度量方法来计算空间中的距离。
五、应用领域三维坐标系在几何学、物理学和计算机图形学等领域中有着广泛的应用。
在几何学中,我们可以用三维坐标系来描述和计算物体的位置、方向和形状等属性。
在物理学中,三维坐标系可以用来描述物体在空间中的运动和相互作用。
在计算机图形学中,三维坐标系可以用来表示和处理三维物体的图像数据,实现真实感的渲染和动画效果。
六、总结通过本文的介绍,我们了解了三维坐标系的定义、坐标表示、坐标变换、空间距离等基本概念。
三维坐标系变换
三维坐标系变换三维坐标系变换可以理解为将一个三维点从一个坐标系转换到另一个坐标系中。
在实际应用中,我们常常需要对物体或者场景进行三维建模和渲染,而三维坐标系变换是不可或缺的一个基础环节。
本文将介绍三维坐标系变换的相关概念和常见应用,以及一些实用的解决方案。
一、常见的三维坐标系变换方式在三维坐标系变换中,常见的方式包括平移、旋转、缩放和仿射变换。
它们分别对应了三维空间中的平移、旋转、比例变化和直线间的关系变化。
在实际应用中,我们可以通过矩阵乘法的方式进行数学计算,也可以利用计算机图形学库中封装好的函数来实现。
1. 平移:将对象在三维坐标系中沿着某个方向移动一定的距离。
平移变换可以用一个形如平移向量的矩阵表示,在三维空间中的坐标变换表达式为:[x' y' z' 1] = [x y z 1] * [1 0 0 tx; 0 1 0 ty; 0 0 1 tz; 0 0 0 1]其中,tx、ty、tz 分别表示在 x、y、z 方向的平移距离。
2. 旋转:将对象绕三维空间中的某个坐标轴或者任意轴进行旋转变换。
如果绕 x 轴旋转,那么旋转变换矩阵为:[x' y' z' 1] = [x y z 1] * [1 0 0 0; 0 cos(theta) -sin(theta) 0; 0 sin(theta) cos(theta) 0; 0 0 0 1]同样的,绕 y 轴、z 轴旋转的矩阵也可以类似地表示。
对于绕任一轴的旋转,可以使用 Rodrigues 公式等数学方法来求解。
3. 缩放:将对象在三个方向上分别进行缩放变换,可以分别用三个缩放因子表示,对应矩阵表示为:[x' y' z' 1] = [x y z 1] * [sx 0 0 0; 0 sy 0 0; 0 0 sz 0; 0 0 0 1]其中,sx、sy、sz 分别表示在 x、y、z 方向放缩的比例因子。
三维极坐标与直角坐标的互化

三维极坐标与直角坐标的互化
三维坐标系是我们在空间中描述物体位置和运动的重要工具。
其中,直角坐标系是最为常见的一种形式,它使用三个轴线(x、y、z)来描述物体在空间中的位置。
而另一种形式则是极坐标系,它使用半径、极角和高度三个参数来描述物体在空间中的位置。
在三维空间中,直角坐标系和极坐标系可以相互转换。
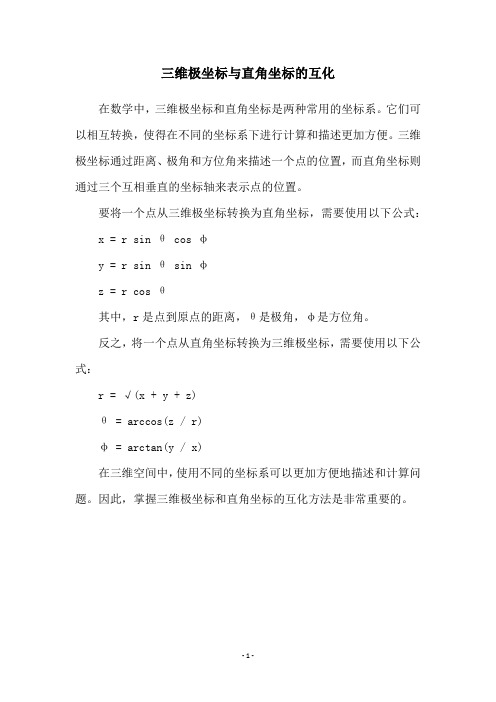
具体而言,我们可以通过以下公式将直角坐标系中的点转换为极坐标系中的点:r = √(x² + y² + z²)
θ = arccos (z/√(x² + y² + z²))
φ = arctan (y/x)其中,r表示点到原点的距离,θ表示点到z轴正方向的夹角,φ表示点到x 轴正方向的夹角。
反之,我们也可以通过以下公式将极坐标系中的点转换为直角坐标系中的点:x = r sinθ cosφ
y = r sinθ sinφ
z = r cosθ这种互化关系在三维图形的制作和计算机图形学中很常见。
因此,了解三维极坐标和直角坐标的互化关系对于理解和应用这些工具都是非常重要的。
三维坐标变换
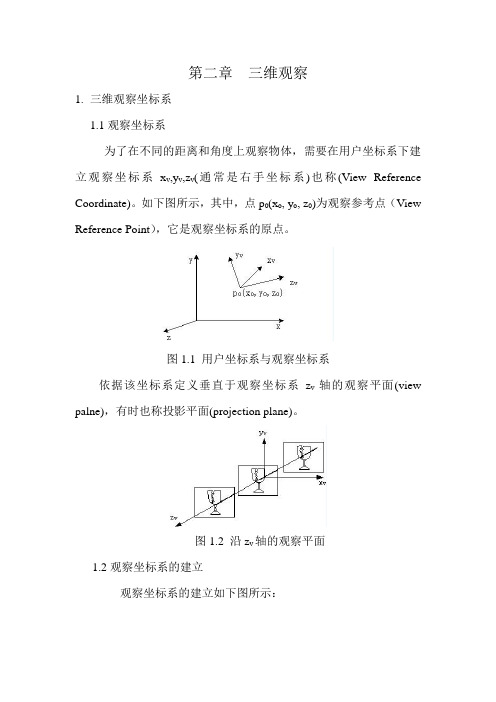
第二章三维观察1.三维观察坐标系1.1观察坐标系为了在不同的距离和角度上观察物体,需要在用户坐标系下建立观察坐标系x v,y v,z v(通常是右手坐标系)也称(View Reference Coordinate)。
如下图所示,其中,点p0(x o, y o, z0)为观察参考点(View Reference Point),它是观察坐标系的原点。
图1.1 用户坐标系与观察坐标系依据该坐标系定义垂直于观察坐标系z v轴的观察平面(view palne),有时也称投影平面(projection plane)。
图1.2 沿z v轴的观察平面1.2观察坐标系的建立观察坐标系的建立如下图所示:图1.3 法矢量的定义观察平面的方向及z v轴可以定义为观察平面(view plane)N法矢量N: 在用户坐标系中指定一个点为观察参考点,然后在此点指定法矢量N,即z v轴的正向。
法矢量V:确定了矢量N后,再定义观察正向矢量V,该矢量用来建立y v轴的正向。
通常的方法是先选择任一不平行于N的矢量V',然后由图形系统使该矢量V'投影到垂直于法矢量N的平面上,定义投影后的矢量为矢量V。
法矢量U:利用矢量N和V,可以计算第三个矢量U,对应于x z轴的正向。
的指定视图投影到显示设备表面上的过程来处理对象的描述。
2.世界坐标系在现实世界中,所有的物体都具有三维特征,但是计算机本身只能处理数字,显示二维的图形,将三维物体和二维数据联系到一起的唯一纽带就是坐标。
为了使被显示的物体数字化,要在被显示的物体所在的空间中定义一个坐标系。
该坐标系的长度单位和坐标轴的方向要适合被显示物体的描述。
该坐标系被称为世界坐标系,世界坐标系是固定不变的。
OpenGL 中世界坐标用来描述场景的坐标,Z+轴垂直屏幕向外,X+从左到右,Y+轴从下到上。
世界坐标系是右手笛卡尔坐标系统。
我们用这个坐标系来描述物体及光源的位置。
世界坐标系以屏幕中心为原点(0,0,0),长度单位这样来定: 窗口范围按此单位恰好是(-1,-1)到(1,1)。
三维坐标系的旋转变换
三维坐标系的旋转变换三维坐标系的旋转变换是指通过旋转操作将一个坐标系转换为另一个坐标系的变换。
在三维空间中,我们可以通过旋转矩阵和欧拉角来描述三维坐标系的旋转变换。
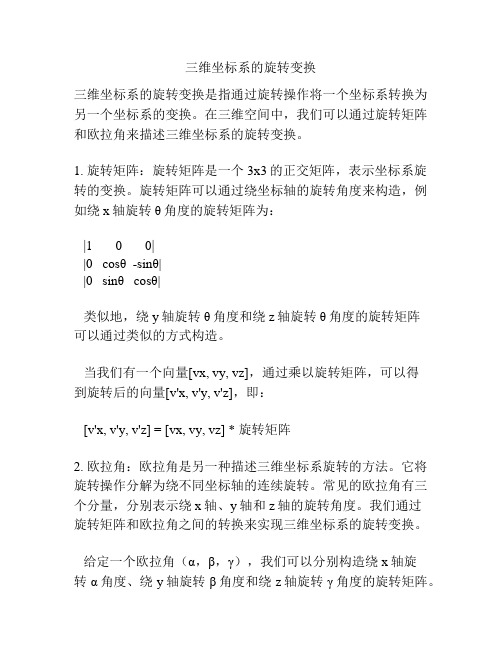
1. 旋转矩阵:旋转矩阵是一个3x3的正交矩阵,表示坐标系旋转的变换。
旋转矩阵可以通过绕坐标轴的旋转角度来构造,例如绕x轴旋转θ角度的旋转矩阵为:|1 0 0||0 cosθ -sinθ||0 sinθ cosθ|类似地,绕y轴旋转θ角度和绕z轴旋转θ角度的旋转矩阵可以通过类似的方式构造。
当我们有一个向量[vx, vy, vz],通过乘以旋转矩阵,可以得到旋转后的向量[v'x, v'y, v'z],即:[v'x, v'y, v'z] = [vx, vy, vz] * 旋转矩阵2. 欧拉角:欧拉角是另一种描述三维坐标系旋转的方法。
它将旋转操作分解为绕不同坐标轴的连续旋转。
常见的欧拉角有三个分量,分别表示绕x轴、y轴和z轴的旋转角度。
我们通过旋转矩阵和欧拉角之间的转换来实现三维坐标系的旋转变换。
给定一个欧拉角(α,β,γ),我们可以分别构造绕x轴旋转α角度、绕y轴旋转β角度和绕z轴旋转γ角度的旋转矩阵。
然后将这三个旋转矩阵依次相乘,得到整体的旋转矩阵。
将向量[vx, vy, vz]乘以该旋转矩阵,即可得到旋转后的向量[v'x, v'y, v'z]。
总结起来,三维坐标系的旋转变换可以通过旋转矩阵或欧拉角来描述和实现。
旋转矩阵通过乘法操作直接作用在向量上,而欧拉角需要将旋转操作分解为三次绕不同坐标轴的旋转,最后再将三个旋转矩阵相乘。
三维极坐标与直角坐标的互化
三维极坐标与直角坐标的互化
在数学中,三维极坐标和直角坐标是两种常用的坐标系。
它们可以相互转换,使得在不同的坐标系下进行计算和描述更加方便。
三维极坐标通过距离、极角和方位角来描述一个点的位置,而直角坐标则通过三个互相垂直的坐标轴来表示点的位置。
要将一个点从三维极坐标转换为直角坐标,需要使用以下公式: x = r sin θ cos φ
y = r sin θ sin φ
z = r cos θ
其中,r是点到原点的距离,θ是极角,φ是方位角。
反之,将一个点从直角坐标转换为三维极坐标,需要使用以下公式:
r = √(x + y + z)
θ = arccos(z / r)
φ = arctan(y / x)
在三维空间中,使用不同的坐标系可以更加方便地描述和计算问题。
因此,掌握三维极坐标和直角坐标的互化方法是非常重要的。
- 1 -。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
(1)绕 z 轴旋转 x x cos y sin
y
y x sin y cos
z z
x
xyzx z z
(2)绕 x 轴旋转
y y cos z sin
y
z y sin z cos
x x
x
x
(3)绕 y 轴旋转 z z cos x sin
三维空间中的旋转变换比二维空间中的旋转变 换复杂。除了需要指定旋转角外,还需指定旋转 轴。
若以坐标系的三个坐标轴x,y,z分别作为旋转轴, 则点实际上只在垂直坐标轴的平面上作二维旋转。 此时用二维旋转公式就可以直接推出三维旋转变 换矩阵。
规定在右手坐标系中,物体旋转的正方向是右 手螺旋方向,即从该轴正半轴向原点看是逆时针 方向。
a13 a23 a33 pz
tx
ty
tz
s
(1)三维线性变换部分 (2)三维平移变换部分 (3)透视变换部分 (4)整体比例因子
7.3 三维坐标变换
几何变换:在一个参考坐标系下将物体从一个 位置移动到另一个位置的变换。
坐标变换: 一个物体在不同坐标系之间的坐标 变换。如从世界坐标系到观察坐标系的变换; 观察坐标到设备坐标之间的变换。再如,对物 体造型时,我们通常在局部坐标系中构造物体, 然后重新定位到用户坐标系。
x
z
R T M T T 1
其中旋转轴A=[ax,ay,az]为
P2 P1 P2 P1
传统的方法通过绕坐标轴旋转变换的乘积表示绕任意轴旋 转的变换。与之相比,这种方法更直观。
7.2.4 三维变换矩阵的功能分块
a11 a21 a31 px
a12
a22
a32
p
y
0
b2 c2
0
1
V VRx a,0, b2 c2
类似地,可以求出:
sin
a
, cos b2 c2
a2 b2 c2
a2 b2 c2
b2 c2
0
a2 b2 c2
Ry
0 a
1 0
a2 b2 c2
1 0
0 0
x y z1 x y z 10 cos sin 0
0 sin cos 0
0 0
0 1
(3) 绕y轴正向旋转 角,y坐标值不变,z、x的坐标相当 于在zox平面内作正 角旋转,于是
cos 0 sin 0
z y x1 z y x 1
P• ’1
x
P2’’•
z
3) Rz
R T Rx Ry Rz Ry1 Rx1 T 1
7.2.3 绕任意轴旋转变换的简单算法 给定具有单位长的旋转轴A=[ax,ay,az]和旋转角 ,
则物体绕OA轴旋转变换的矩阵表示可确定如下:
7.2 三维几何变换
7.2.1 基本三维几何变换
1. 平移变换
若空间平移量为(tx, ty, tz),则平移变换为
x y
x y
tx ty
z z tz
z
P’(x’,y’,z’)
P(x,y,z)
y
1 0 0 0
x
y
z1
x
y
z
1
0
1
0
面上的投影向量与z 轴正向的夹角。
y
V1=(0,b,c)
V=(a,b,c)
x
z
根据矢量的点乘与叉乘,可以算出:
sin b ,cos c
b2 c2
b2 c2
因此,
1
0
Rx
0
0
0 c
b2 c2 b
b2 c2 0
0 0
b
b2 c2 c
0
Aˆ
a a
x y
a a
x x
a z a x
0
A
az
axay ayay azay
az 0
a a
x y
a a
z z
azaz
axax axay axaz
a y Aˆ ayax a x a x
axax axax
a
x
a
x
axax
第7章 三维变换
7.1 简介 7.2 三维几何变换 7.3 三维坐标变换
7.1 简介
三维平移变换、比例变换可看成是二维情况的 直接推广。但旋转变换则不然,因为我们可选 取空间任意方向作旋转轴,因此三维变换处理 起来更为复杂。
与二维变换相似,我们也采用齐次坐标技术 来描述空间的各点坐标及其变换,这时,描 述空间三维变换的变换矩阵是4×4的形式。 由此,一系列变换可以用单个矩阵来表示。
7.2.2 组合变换
1. 物体绕平行于某一坐标轴的旋转变换。基本步骤:
(1) 平移物体使旋转轴与所平行的坐标轴重合;
(2) 沿着该坐标轴进行指定角度的旋转;
(3) 平移物体使旋转轴移回到原位置。
y y
y
z
x
z (a)
xz
xz
(b)
R T Rx T 1
(d) x
(c)
2. 绕任意轴旋转的变换
•(x,y,z)
x0, y0, z0 (0,0u,0x x
z 第二步,利用单位坐标向量构造坐标旋转矩阵
ux1 uy1 uz1 0
R ux2 uy2 uz2 0
ux3 uy3 uz3 0
0
0
0 1
该矩阵R将单位向量 ux uy uz 分别变换到x,y和z 轴。 综合以上两步,从oxyz到o’x’y’z’的坐标变换的矩阵为
T x0, y0,z0 R ,也即坐标变换公式为:
x, y, z,1 x, y, z,1T x0, y0,z0 R
说明:变换矩阵TR将一个直角坐标系变换为另一个 坐标系。即使一个坐标系是右手坐标系,另一个为 左手坐标系,结论依然成立。
习题7
7-1 对于点P(x,y,z) ,(1) 写出它绕x 轴旋转 角,然后再绕y轴旋 转 角的变换矩阵。 (2)写出它绕 y 轴旋转 角,然后再绕 x 轴 旋转 角的变换矩阵。所得到的变换矩阵的结果一样吗?
0
0 0 1 0
tx ty tz 1
x
补充说明:点的平移、 物体的平移、多面体 的平移、逆变换
2. 比例变换
(1) 相对坐标原点的比例变换 一个点P=(x,y,z)相对于坐标原点的比例变换的矩 阵可表示为
sx 0 0 0
z
x
y
z1
x
y
z
1
0 0
sy 0
0 sz
x z sin x cos
y y
z
y
cos sin 0 0
x y z1 x y z 1 sin cos 0 0
0
0 1 0
0
0 0 1
绕 z 轴旋转
1 0
0 0
x y z1 x y z 10 cos sin 0
0 0
0 0 0 1
x y
x xsx , y ysy , z zsz 其中 sx , sy , sz 为正值。
(2) 相对于所选定的固定点的比例变换
z
z
(xf,yf,zf)
(1)
(xf,yf,zf)
y (2)
y
x z
x yz
(3) (xf,yf,zf)
(xf,yf,zf)
z
将原坐标系xyz下的坐标转换成新坐标系x’y’z’的坐标 可由以下两步完成:
首先, 平移坐标系xyz,使其原点与新坐标系x’y’z’的 原点(x0,y0,z0)重合;
平移矩阵为:
1 0 0 0
T
0
1
0 0
0 0 1 0
x0 y0 z0 1
y
y’
y
uy
(1)平移物体使旋转轴通过坐标原点;
y
y
P2 •
• P’2
P1 •
P• ’1
x
xz
z
(1)
(2)旋转物体使旋转轴与某个坐标轴(如z轴)重合;
(3)关于该坐标轴进行指定角度的旋转;
y
y
P• ’1
x
P2’’•
z
(2)
P• ’1
x
P2’’•
z
(3)
(4) 应用逆旋转变换将旋转轴回到原方向; (5) 应用逆平移变换将旋转轴变换到原位置。
0 sin cos 0
0 0
0 1
绕 x 轴旋转
cos 0 sin 0
x y z1 x y z 1
0
1
0
0
sin 0 cos 0
0
0
0
1
绕 y 轴旋转
旋转变换矩阵规律: xyz
x 1 0 0 0
对于单位矩阵
y 0 z 0
设新坐标系o’x’y’z’ 原点的 y 坐标为(x0,y0,z0),相对 原坐标系其单位坐标矢量 为:
ux ux1, ux2, ux3
y’
uy
x0, y0, z0
ux
x’
uz
z’
uy uy1, uy2, uy3
(0,0,0)
x