5--典型环节传递函数-比例环节
控制工程基础(第三章,控制系统的复数域描述)
负载效应
2、动态结构图的等效变换 结构图表示了系统中各信号之间的传递与运算的全部关 系。但有时结构图比较复杂,需简化后才能求出传递函数, 等效原则是:对结构图任何部分进行变换时,变换前后该 部分的输入量、输出量及其相互之间的数学关系应保持不 变。 (1)串联环节的简化
X 0 (s)
G1 ( s )
4. 积分环节 积分环节的动态方程和传递函数分别为
c (t ) K r (t ) dt
K G (s) s
特点:输出量与输入量的积分成正比例,当输入 消失,输出具有记忆功能。 实例:电动机角速度与角度间的传递函数、电容 充电、模拟计算机中的积分器等。
5. 二阶振荡环节
振荡环节的运动方程和传递函数分别为
(a)
(b)
结构图的相加点(a)和分支点(b)
绘制系统方框图的一般步骤 1) 写出系统中每一个部件的运动方程式 2) 根据部件的运动方程式写出相应的传递函数,一个 部件用一个方框表示在框中填入相应的传递函数
3)根据信号的流向,将各方框单元依次连接起来,并 把系统的输入量置于系统方框图的最左端,输出量置 于最右端 例 绘制下图所示电路的方框图 方程有
Gs 就是该系统的传递函数 阵
用拉氏变换做微分方程组的传递函数矩阵,中间变量的消元
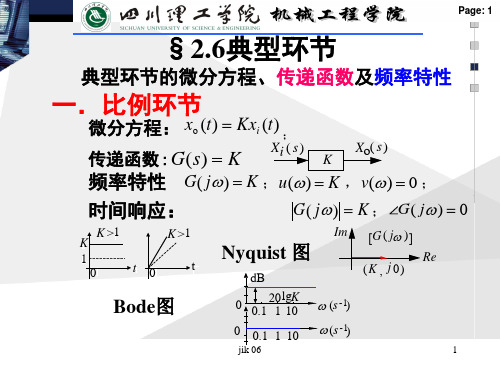
三、典型环节的传递函数 1. 比例环节
比例环节又称放大环节,该环节的运动方程和相 对应的传递函数分别为
c(t ) Kr (t )
式中K为增益。
C ( s) G( s) K R( s )
特点:输入输出量成比例,无失真和时间延迟。
R-L-C电路
c
弹簧-质量-阻尼器系统
6. 纯时间延时环节
延时环节的动态方程和传递函数分别为
自动控制理论_哈尔滨工业大学_2 第2章线性系统的数学模型_(2.4.1) 典型环节的传递函数PPT
0
t
积分环节在单位阶跃输入下的响应
例:积分器
i2
C
ui R
_
i1
uo
+i1 i2Fra bibliotek1 Rui
(t)
C
d dt
u0
(t )
uo
(t)
1 RC
ui (t)dt
G(s) Uo (s) 1 1 Ui (s) RC s
二、几种典型环节的数学模型
4.微分环节
c(t) d r(t)
斜率1/T
0τ
t
例: • 汽车加速、火箭升空; ——作用力和输出速度
• 加热系统; ——加热量和温度变化
• 励磁回路; ——输入电压和励磁电流
惯性大小用τ来量度。 ——τ越大,接近目标值越慢 ,惯性越大;τ越小,接近 目标值越快,惯性越小。
几乎任何物理系统都包含 大大小小的惯性。
二、几种典型环节的数学模型
滞后环节
二、几种典型环节的数学模型
1.比例环节
y(t) Ku(t)
G(s) Y(s) K U (s)
K——称为比例系数或放大系数,也称为环节的增益,有量纲。
输出量无失真、无滞后、成比例地复现输入。
• 无弹性变形的杠杆;
——作用力和输出力
• 忽略非线性和时间迟后的运算放大器;
——比例放大器的输入电压和输出电压
τ=RC—时间常数
当 r(t) 1(t) 时, R(s) 1
s
Y(s) s 1 1 s 1 s s 1
t
y(t) e
t=0时,输出幅值为1;
t→∞时,指数衰减至0。
二、几种典型环节的数学模型
传递函数及方块图剖析

则G(s) = Uo s = RCS
(RC = T
K 1
Ui s RCS + 1
K = 1)
Gs k
4 积分环节
s
时间域方程
xo t k xi t dt
X o s
k
X i s
s
X o s X i s
k s
例9
i2(t)
i1(t) ui(t)
R
A
B
C
_
K0 +
uo(t)
ui (t) = -C duo (t)
传递函数及 典型环节的传递函数
一、传递函数定义:
在初始条件为零时,线性
定常系统输出象函数 Xo s与输 入象函数 Xi s 之比。
Gs
X o s Xi s
Xi s Gs Xo s
设线性定常系统的微分方程为:
a
0
xon
t
a1
x
n1
o
t
a
n1
x
o
t
a
n
x
o
t
b0
x
m
i
t
b1
x
m
i
1
t
bm 1
x i
t
则G(s) = Uo s =
1
Ui s RCS + 1
(RC = T)
例4
弹簧-阻尼系统
K
xi
t
xo
t
D
dxo
dt
t
KXi s KXo s DsXo s
Gs
Xo s Xi s
K Ds
K
D
1 s 1
K
Gs Ks
五、传递函数

C ui(t) i(t) R uo(t)
RCs Ts , T RC RCs 1 Ts 1
无源微分网络
显然,无源微分网络包括有惯性环节和微分环 节,称之为惯性微分环节,只有当|Ts|<<1时, 才近似为微分环节。 除了上述纯微分环节外,还有一类一阶微分环 节,其传递函数为:
14
X o ( s) G( s) K ( s 1) X i ( s)
16
如:有源积分网络 i1 ( t)
R a +
i2 ( t)
C
u i( t)
u o ( t)
du o (t ) RC ui (t ) dt 1 1 G( s ) , T RC RCs Ts
17
振荡环节
含有两个独立的储能元件,且所存储的能量能 够相互转换,从而导致输出带有振荡的性质, 运动方程为:
20
L-R-C电路
(t ) uo (t ) ui (t ) Li
uo (t ) 1 ic (t ) dt C
整理后得传递函数为:
il ic iR
G(S )
UO ( S ) 1 Ui ( S ) LCs 2 L S 1 R
21
二阶微分环节 运动方程:
2 d2 d xo (t ) K x (t ) 2 xi (t ) xi (t ), 0 1 2 i dt dt
8
的零极点分布图
4、典型环节及其传递函数 环节 具有某种确定信息传递关系的元件、元件组或 元件的一部分称为一个环节。经常遇到的环节 称为典型环节。
任何复杂的系统总可归结为由一些典型环节所 组成。
典型环节示例
第二章5典型环节.
5
Page: 6
三.积分环节
1 微分方程: xo (t ) xi (t )dt T
X o ( s) 1 传递函数: G( s) X ( s) Ts i
Xi ( s) 1 Ts Xo ( s)
频率特性:
1 j 1 G( j ) 0 j j
1
o
幅频特性 ∶ G( j ) = , 相频特性∶∠G( j ) = - 90
KT 虚频特性: v( ) 1 T 2 2 0
jik 06 9
幅频特性:
1 T 2 2 相频特性: G( j ) arctg(T ) 特殊点: 0, G( j 0) K , G( j 0) 0 ;
G ( j )
K
Page: 10
, G( j) 0, G( j) 90o ;
Page: 3
特殊点: =0, G ( j 0) =0,∠ G( j 0) =90 ;
o
∠G (j∞) =90 = ∞, G(j∞) = ∞,
Nyquist 图:
G ( j ) ( 0 , j ) 90 Im
o
Re
dB 20 lg G
20
Bode图:
A( ) 20 lg
ui(t) R1 ∑ R2 -
z1 xi(t)
Page: 2
xo(t) z2
uo(t)
>1 0 t
R2 R2 u o (t ) u i (t ) G ( s ) K R1 R1
二. 微分环节
时间响应:
Xi ( s)
(t) >1 1 0
t
i ( t ) 微分方程: xo (t ) Tx
典型环节分析实验报告

一、实验目的1. 理解并掌握典型环节(比例、惯性、比例微分、比例积分、积分、比例积分微分)的原理及其在控制系统中的应用。
2. 通过实验验证典型环节的阶跃响应特性,分析参数变化对系统性能的影响。
3. 熟悉MATLAB仿真软件的使用,掌握控制系统仿真方法。
二、实验原理控制系统中的典型环节是构成复杂控制系统的基础。
本实验主要研究以下典型环节:1. 比例环节(P):输出信号与输入信号成比例关系,传递函数为 \( G(s) = K \)。
2. 惯性环节:输出信号滞后于输入信号,传递函数为 \( G(s) = \frac{K}{T s + 1} \)。
3. 比例微分环节(PD):输出信号是输入信号及其导数的线性组合,传递函数为\( G(s) = K + \frac{K_d}{s} \)。
4. 比例积分环节(PI):输出信号是输入信号及其积分的线性组合,传递函数为\( G(s) = K + \frac{K_i}{s} \)。
5. 积分环节(I):输出信号是输入信号的积分,传递函数为 \( G(s) =\frac{K_i}{s} \)。
6. 比例积分微分环节(PID):输出信号是输入信号、其导数及其积分的线性组合,传递函数为 \( G(s) = K + \frac{K_i}{s} + \frac{K_d}{s^2} \)。
三、实验设备1. 计算机:用于运行MATLAB仿真软件。
2. MATLAB仿真软件:用于控制系统仿真。
四、实验步骤1. 建立模型:根据典型环节的传递函数,在MATLAB中建立相应的传递函数模型。
2. 设置参数:设定各环节的参数值,例如比例系数、惯性时间常数、微分时间常数等。
3. 仿真分析:在MATLAB中运行仿真,观察并记录各环节的阶跃响应曲线。
4. 参数分析:改变各环节的参数值,分析参数变化对系统性能的影响。
五、实验结果与分析1. 比例环节:阶跃响应曲线为一条直线,斜率为比例系数K。
2. 惯性环节:阶跃响应曲线呈指数衰减,衰减速度由惯性时间常数T决定。
孙炳达版 《自动控制原理》第5章 控制系统的频率特性分析法-3
比例环节可以完全、真实地复现任何频率的输入 信号,幅值上有放大或衰减作用;υ (ω)=0º ,表示输 出与输入同相位,既不超前也不滞后。
5.3 典型环节的频率特性
二、积分环节 1.代数表达式 传递函数
G (s) 1 s 1
频率特性 相频特性
幅频特性
A( )
1 1 1 j 90 G( j ) j e j () 90
对数频率特性曲线是一条斜线, 斜率为-20dB/dec, 称为高频渐 近线,与低频渐近线的交点为ωn=1/T,ωn称为交接频率或转 折频率,是绘制惯性环节的对数频率特性时的一个重要参数。
5.3 典型环节的频率特性
3.伯德图 对数幅频图
L( ) 20lg A( ) 20lg 1 1 2T 2 20lg 1 2T 2
G ( j ) 1 j 2 2 2 (1 2 2 ) j 2 (1 2 2 ) 2 (2 ) 2 e
2 T j arctan 1 2 2
5.3 典型环节的频率特性
2.极坐标图 理想微分环节的极坐标图在0 <<的范围内,与正虚轴重合。 可见,理想微分环节是高通滤 波器,输入频率越高,对信号的 放大作用越强;并且有相位超前 作用,输出超前输入的相位恒为 90º ,说明输出对输入有提前性、 预见性作用。 (纯微分)
在控制工程中,采用分段直线表示对数幅频特征 曲线,作法为: a.当Tω<<1(ω<<1/T)时,系统处于低频段 L( ) 20lg1 0 b.当Tω>>1(ω>>1/T)时,系统处于高频段
L( ) 20lg T
此直线方程过(1/T,0)点, 且斜率为-20dB/dec。
典型环节数学模型与阶跃响应
第三章 自动控制系统的数学模型
当输入量r(t)=1(t)时, 输出量 C(s)为
K 1 C ( s ) G ( s ) R( s ) Ts 1 s
可得其单位阶跃响应为
c(t)= L-1[C(s)]=K(1-e-t/T)
第三章 自动控制系统的数学模型
当K=1时, 惯性环节的单位阶跃响 应曲线如上图 (b)所示。 对惯性环节的阶 跃 响 应 曲 线 进 行 分 析, 可 得 C(0)=0 , C(T)=0.632 , C(3T)=0.95 , C(4T)=0.982 , C(∞)→1。因此, 惯性环节在输入量突变 时, 输出量不能突变, 只能随着时间的 推移按指数规律变化, 这表明该环节具 有惯性特点。 常见的惯性环节如下图所 示。
2 n G( s ) 2 2 s 2n s n
振荡环节的方框图如下图 (a)所示。
c(t) c(t) R(s)
2 n 2 s 2 2 n s n
C(s)
1
r(t)
0 (a) (b)
t
图 振荡环节方框图及单位阶跃响应曲线 (a) 振荡环节方框图; (b) 振荡环节单位阶跃响应
第三章 自动控制系统的数学模型
对上式作拉氏变换, 可得 T2s2C(s)+2ζTsC(s)+C(s)=R(s) 移项整理有
C ( s) 1 G( s) 2 2 R( s) T s 2Ts 1
第三章 自动控制系统的数学模型
令T=1/ωn, ωn为该环节的无阻尼自然 振荡频率, 则上式可改写成如下形式:
振荡环节的单位阶跃响应曲线一般 如上图 (b)所示。 振荡环节的单位阶跃响应, 随着阻 尼比 ζ 的不同, 表现出不同的动态响应 过程, 如下图 所示。
传递函数
(t)
则在零初始条件下,对上式进行拉氏变换,可得系 统传递函数的一般形式:
G(s) Xo Xi
s s
b0 s m a0sn
b1sm1 a1sn1
bm1s bm (n m) an1s an
2.2.1 传递函数的性质
性质1 传递函数只表示输出量与输入量的关系,是一 种函数关系。这种函数关系由系统的结构和参 数所决定,与输入信号和输出信号无关。这种 函数关系在信号传递的过程中得以实现,故称 传递函数。
输出量与输入量之间能用一阶线性微分方程描述的
环节称为一阶惯性环节:
T xo (t) x0 (t) xi (t)
一阶惯性环节的传递函数为:
G(s)
1
Ts 1
式中 T-时间常数,表征环节惯性,和结构参数有关。
特点:含一个储能元件,当输入量突然变化时,由于物理状
态不能突变,输出量也就不能立即复现,而是按指数规律逐渐变
性质5
如果系统的G(s)未知,可以给系统加上已知 的输入,研究其输出,从而得出传递函数。
2.2.1 传递函数的性质
性质6 传递函数G(s)的拉氏反变换是脉冲响应g(t)。
脉冲响应(脉冲过渡函数)g(t)是系统在单位 脉冲输入时的输出响应。
Xi (s) L[ (t)] 1
xo (t) L1[ X o (s)] L1[G(s) Xi (s)] L1[G(s)]
这样,任何复杂的系统总可归结为由一些典型环节所 组成,从而给建立数学模型,研究系统特性带来方 便,使问题简化。
2.2.3 典型环节及其传递函数
系统的传递函数可以写成:
b
c
K
典型环节的传递函数
1、比例环节 凡输出量与输入量成正比,输出不失真也不延迟 而按比例地反映输入的环节,称为比例环节又叫 放大环节、无惯性环节、零阶环节
•动力学方程为:
xotKxit
•传递函数为:
Gs
Xo s Xi s
K
典型环节的传递函数
2、积分环节(纯积分环节) 凡输出量与输入量的积分成正比,称为积分环节, 又称为理想积分环节
•动力学方程为:
Tdxdottxotxit
•传递函数为:
GsXXoi ss
1 Ts1
典型环节的传递函数
5、导前环节(一阶微分环节) 又称为一阶微分环节,是一个相位超前环节。
•传递函数为:
GsXXoi ssTs1
典型环节的传递函数
6、振荡环节(二பைடு நூலகம்积分环节) 振荡环节是二阶环节,又称二阶振荡环节
•传递函数为:
•动力学方程为:
xotT1xi tdt
•传递函数为:
Gs
Xo s Xi s
1 Ts
典型环节的传递函数
3、微分环节(纯微分环节) 凡输出量与输入量的微分成正比,称为微分环节, 又称为理想微分环节
•动力学方程为:
xo
t
T
dxi t
dt
•传递函数为:
Gs
Xo s Xi s
Ts
典型环节的传递函数
4、惯性环节(一阶积分环节) 又称一阶惯性环节,是一个相位滞后环节。
G sX Xo isss22 n 2 nsn 2
GsX Xo issT2s22 1Ts1
典型环节的传递函数
7、二阶微分环节
•传递函数为:
G sX Xo isss22 n 2 nsn 2 GsX Xo issT2s22Ts1