作业2-轴对称问题的平衡微分方程推导
弹性力学总结

弹性力学总结第一章绪论一、弹性力学的内容:弹性力学的研究对象、内容和范围。
二、弹性力学的基本量1、外力(1)体力(2)面力2、内力——应力3、应变4、位移以上基本量要求掌握其定义、表达式、分量的符号、正负号规定、量纲。
三、弹性力学中的基本假定1、连续性2、完全弹性3、均匀性4、各向同性以上是对材料性质的假定,凡符合以上四个假定的物体,称为理想弹性体。
5、小变形假定(对物体的变形状态所作的假定)要求掌握各假定的内容和意义(在建立弹性力学基本方程时的作用)。
习题举例:1、弹性力学,是固体力学的一个分支,它的任务是研究弹性体由于受外力作用、边界约束或温度改变等原因而发生的(),从而解决各类工程中所提出的强度、刚度和稳定问题。
A.应力、应变和位移;B.弯矩、扭矩和剪力;C.内力、挠度和变形;D.弯矩、应力和挠度。
2、在弹性力学中,作用于物体的外力分为()。
A.体力和应力;B.应力和面力;C.体力和面力;D.应力和应变。
3、重力和惯性力为(C )。
A .应力;B .面力;C .体力;D .应变。
4、分布在物体体积内的力称为( C )。
A .应力;B .面力;C .体力;D .应变。
5、物体在体内某一点所受体力的集度的表达式及体力分量的量纲为( A )。
A .0lim V F f V∆→∆=∆,-2-2L MT ; B .0lim S F f S ∆→∆=∆,-1-2L MT ; C .0lim A F p A ∆→∆=∆,-1-2L MT ; D .0lim V F f V ∆→∆=∆,-1-2L MT 。
6、弹性力学研究中,在作数学推导时可方便地运用连续和极限的概念,是利用了( )假定。
A .完全弹性;B .连续性;C .均匀性;D .各向同性。
7、( A )四个假设是对物体的材料性质采用的基本假设,凡是符合这四个假设的物体,就称为理想弹性体。
A .完全弹性,连续性,均匀性和各向同性;B .完全弹性,连续性,均匀性和小变形;C .连续性,均匀性,各向同性和小变形;D .完全弹性,连续性,小变形和各向同性。
《弹性力学简明》习题提示和参考答案
题提示和答案《弹性力学简明教程》习题提示和参考答案第二章习题的提示与答案2-1 是2-2 是2-3 按习题2-1分析。
2-4 按习题2-2分析。
2-5 在的条件中,将出现2、3阶微量。
当略去3阶微量后,得出的切应力互等定理完全相同。
2-6 同上题。
在平面问题中,考虑到3阶微量的精度时,所得出的平衡微分方程都相同。
其区别只是在3阶微量(即更高阶微量)上,可以略去不计。
2-7 应用的基本假定是:平衡微分方程和几何方程─连续性和小变形,物理方程─理想弹性体。
2-8 在大边界上,应分别列出两个精确的边界条件;在小边界(即次要边界)上,按照圣维南原理可列出3个积分的近似边界条件来代替。
2-9 在小边界OA边上,对于图2-15(a)、(b)问题的三个积分边界条件相同,因此,这两个问题为静力等效。
2-10 参见本章小结。
2-11 参见本章小结。
2-12 参见本章小结。
2-13 注意按应力求解时,在单连体中应力分量必须满足(1)平衡微分方程,(2)相容方程,(3)应力边界条件(假设)。
2-14 见教科书。
2-15 见教科书。
2-16 见教科书。
2-17 取它们均满足平衡微分方程,相容方程及x=0和的应力边界条件,因此,它们是该问题的正确解答。
2-18 见教科书。
2-19 提示:求出任一点的位移分量和,及转动量,再令,便可得出。
第三章习题的提示与答案3-1 本题属于逆解法,已经给出了应力函数,可按逆解法步骤求解:(1)校核相容条件是否满足,(2)求应力,(3)推求出每一边上的面力从而得出这个应力函数所能解决的问题。
3-2 用逆解法求解。
由于本题中l>>h, x=0,l 属于次要边界(小边界),可将小边界上的面力化为主矢量和主矩表示。
3-3 见3-1例题。
3-4 本题也属于逆解法的问题。
首先校核是否满足相容方程。
再由求出应力后,并求对应的面力。
本题的应力解答如习题3-10所示。
应力对应的面力是:主要边界:所以在边界上无剪切面力作用。
弹性力学中平衡微分方程推导方法的一点小改进
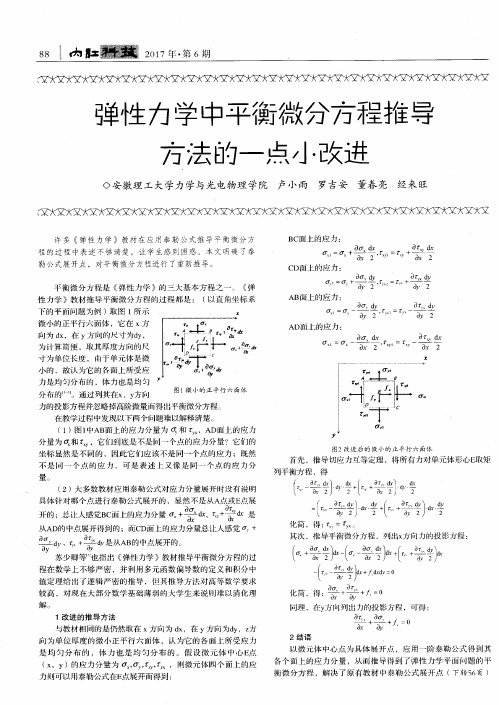
以微 元 体 中心 点 为 具 体 展 开 点 ,应 用一 阶泰 勒 公 式 得 到 其 各 个 面上 的应 力分 量 ,从 而 推 导 得 到 了 弹性 力学 平面 问题 的平 衡 微 分方 程 .解 决 了原 有 教 材 中泰 勒 公 式 展 开 点 ( 下转 5 6 页)
5 6{ 南I
2 0 1 7 年 . 第6 期
根 据 以上 分 析 ,虚 拟 样 机 技 术 应 用 于 课 堂 教 学 能够 较好 地
的 计 算 及 稳 态 、动 态 性 能 的 形 象 表 达 。G a s T u r b是 德 国J o a c h i m
K u r z k e 博士开发的燃气轮机 ( 航空发动机和地面燃气轮机 ) 总
璺 矗
A D 面 上 的应 力 :
O' x 4 O " x
+
2 , x
小 的 ,故 认 为 它 的 各面 上 所受 应
力 是均 匀 分 布 的 ,体 力 也 是 均 匀
分 布的 ” 一 。 通过 列 其在 x 、y 方 向
图1 微 小的正 平 行 六面 体
力的投影方程并忽略掉高阶微量而得出平衡微分方程。
量。
图 2改 进 后 的 微 小 的 正 平 行 六 面 体
首 先 ,推导 切 应 力互 等 定理 ,将 所有 力对 单 元体 形 心 E 取矩
列 平衡 方程 ,得 3 x ) O r d:
( 2)大 多数 教 材应 用 泰 勒 公式 对 应 力 分量 展 开 时没 有 说 明
8 8
耘
2 0 1 7 年・ 第6 期
单 性 学中平衡 微分方程 推 导
‘
/
去的 厶口 . J 点/ J . 改 进
弹性力学简明教程-第四章-平面问题的极坐标解答习题详解

第四章 平面问题的极坐标解答典型例题讲解例4-1 如图所示,矩形薄板在四边受纯剪切力作用,切应力大小为q 。
如果离板边较远处有一小圆孔, 试求孔边的最大和最小正应力。
例4-1图【解】(1)根据材料力学公式,求极值应力和量大正应力的方位角max min 2x y σσσσ+⎫=⎬⎭ 其中0,,x y x q σστ===得max min ,q q σσ==-。
最大正应力 所在截面的方位角为max 0max 0tan 104yqq τασσπα=-=-=-→--=-qqx若在该纯剪切的矩形薄板中,沿与板边成方向截取矩形ABCD ,则在其边界上便承受集度为q 的拉力和压力,如图所示。
这样就把受纯剪切作用的板看作与一对边受拉,另一对边受压的板等效。
(2)取极坐标系如图。
由2222442222cos 2(1)(13),cos 2(13),(4-18)sin 2(1)(13).ρφρφr r σq φρρr σq φρr r τq φρρ⎫=--⎪⎪⎪⎪=-+⎬⎪⎪=--+⎪⎪⎭得矩形薄板ABCD 内的应力分量为()()()2222442222cos 2(1)(13)cos 2(13)sin 2(1)(13)ρφρφa a σq φa ρρa σq φb ρa a τq φc ρρ=--=-+=--+ 其中 为小孔的半径,而孔边最大与最小正应力由式(b ),在 处得到44cos 2(13)4cos 2,φa σq φaϕ=-+=-当 , 时,孔边最小正应力为,当时,孔边最大正应力为。
分析:矩形板ABCD 边界上各点的应力状态与板内无孔时的应力状态相同。
也可以应用叠加法,求解薄板的各种较复杂的平面应力(应变)问题。
习题全解4-1试比较极坐标和直角坐标中的平衡微分方程、几何方程和物理方程,指出哪些项是相似的,哪些项是极坐标中特有的?并说明产生这些项的原因。
【解】 (1)极坐标,直角坐标中的平衡微分方程10210f f ρρϕρϕρρϕϕρϕϕστσσρρϕρτστρρϕρ∂∂-⎧+++=⎪∂∂⎪⎨∂∂⎪+++=⎪∂∂⎩ 00yxx x y xy yf xy f y x τσστ∂⎧∂++=⎪∂∂⎪⎨∂⎪++=⎪∂∂⎩将极坐标中的平衡微分方程与直角坐标中的平衡微分方程相比较,第一式中,前两项与直角坐标相似;而项是由于正 面上的面积大于负 面上的面积而产生的,是由于正负 面上的正应力 在通过微分体中心的 方向有投影而引起的。
轴对称问题

轴对称应力状态分析当作用力对称分布于回转体时,其内部的应力状态称为轴对称应力状态,轴对称应力状态的特点是:(1)通过旋转体轴线的子午面在变形过程中始终不会扭曲,所以在θ面上没有剪应力,即pθτ=Zθτ=0,所以θσ就是一个主应力。
(2)各应力分量与θ坐标无光,对θ的偏导数为零。
采用圆柱坐标系时,轴对称的应力张量为:ij 0=000P ZPP ZZ θσσσσ⎛⎫ ⎪ ⎪ ⎪⎝⎭ττ设点a 的坐标为(P ,θZ),应力状态为ijσ,a 1的坐标为(p p d +,d θθ+,z z d +),应力状态为ij ijd σσ+,即z z z ij ij z zzzzzz z z=zzz z d d d d d d d d d d θθθθθθθθθθσσθθσσσσθθσθσθ∂∂∂⎛⎫+++⎪∂∂∂⎪∂∂∂ ⎪++++ ⎪∂∂∂⎪∂∂∂ ⎪+++ ⎪∂∂∂⎝⎭ρρρρρρρρρρττρττρτττρτρτττρτρ 根据力的平衡条件=P ∑ρ0;=0P θ∑;=0Z P ∑,可得以下圆柱坐标系的平衡微分方程为:z zzz 0z 0z θσσσσ∂∂-⎫++=⎪⎪∂∂⎬∂∂⎪++=⎪∂∂⎭ρρρρρτρρττρρ在有些轴对称问题(例如圆柱体的均匀镦粗、挤压和拉拔等)中,由于=d d ρθεε,由增量理论可知,当某两个正应变增量的分量相等时,其对应的应力也相等,所以=ρθσσ。
那么轴对称的平衡方程可简化为:z zz z =0z =0z ρρρρσρσρρ∂∂⎫+⎪∂∂⎪⎬∂∂⎪++⎪∂∂⎭τττ轴对称的屈服应力: 1 Tresca 屈服准则Tresca 认为当最大剪应力达到某定值时材料就会发生屈服,开始塑性变形阶段,即 max cτ=,由于屈服时的定值c 与应力状态无光,故可由单周俊宇拉伸实验或薄壁管扭转实验确定。
单向均匀拉伸中230σσ==,屈服时1sσσ=,所以最大剪应力为:13113222scσσσστ-====,该剪应力也应等于纯剪屈服时的剪应力k ,所以当假定 123σσσ≥≥,塑性条件可写成31==2ks σσσ-,该公式同样可用于轴对称问题中。
Hertz理论

2 1
1 K2 E2
2 2
方程(19)
由方程(14)和(17)可以求得 方程(19)的表达式为:
K1 K 2 q ds d r
2
现在问题转化为寻求 q 的一个表达式 以满足上式。
当两球体受到力P的作用而沿着0点的法向 相互压紧时,在接触处发生局部变形,而形 成一个小的圆形接触面(斑),其接触区半 径及变形均远远小于两球半径R1、R2。 因此M和N两点的距离为:
r z1 z2 2
2
1 1 R R 2 1
弹性变形量计算(14)
设 w1 表示球体1面上的点M由于局部变形 所产生的沿 z1 轴方向的位移,w2 表示球2 面上的点N由于局部变形所产生的沿 z2 轴方 向的位移,两球的中心O1O2彼此接近的距 离为。如果M和N点在接触区域内,则可以 得到: z z w w
按照Hertz假设,接触区域的压力分布是半球体 形式的,这样接触中心的压力最大,为q0,其
位置在接触中心O处。所以接触区的压力 分布q的积分可以表达为(见图4):
q0 q ds a F F
a 2
2
r 2 sin 2
式中F是虚线半圆的面积,a 是接触圆半径。 积分表达式是把接触压力沿弦 mn 进行积分, 可以求得。 将上述方程代入到方程(19)式,得:
方程(1)
因为 d 很小,所以可以认为式中的
d d sin 2 2
并略去高阶微量,并除以 r· dr · d · dz, 前式整理后可得:
轴对称问题

(i , j , m )
由上式可见,单元内应变 εr、εz、γrz都是常量,但φi, φj, φm与各单元中各点的位置(r, z)有关,环向应变εθ不是常量; 当结构包含对称轴(r = 0)在内时,φi , φj , φm是奇异的, 这将给数值计算带来困难。
汽车工程系
结构分析与CAE研究室
- 16 -
z j
wj uj wi ui
单元结点力向量:
wm um
i m
{ f }e
⎧ fi ⎫ ⎪ ⎪ = ⎨fj ⎬ ⎪ ⎪ ⎩ f m ⎭ 6×1
r
汽车工程系
结构分析与CAE研究室
- 11 -
4.2 三结点三角形轴对称单元
4.2.2 单元位移模式 由于有三个结点,在r方向和z方向上各有三个结点条件, 因此设它的单元位移模式为
u ( r , z ) = α1 + α 2 r + α 3 z ⎫ ⎬ w(r , z ) = α 4 + α 5 r + α 6 z ⎭
该位移模式与平面问题三结点三角形单元完全相同。同样, 将结点坐标和结点位移代入上式可得到单元内部位移
⎧ ui ⎫ ⎪w ⎪ ⎪ i⎪ 0 ⎤ ⎪uj ⎪ e ⎪ ⎪ ⎨ ⎬ = [ N (r , z )]{δ } Nm ⎥ ⎪ wj ⎪ ⎦ ⎪ um ⎪ ⎪ ⎪ ⎪ wm ⎪ ⎩ ⎭
-5-
4.1 基本概念
4.1.2 基本方程 ①平衡方程
∂σ r ∂τ zr σ r −σ θ + + + br = 0 ∂r ∂z r ∂σ z ∂τ rz τ rz + + + bz = 0 ∂z ∂r r ⎫ ⎪ ⎪ ⎬ ⎪ ⎪ ⎭
Hertz理论

按照Hertz假设,接触区域的压力分布是半球体 形式的,这样接触中心的压力最大,为q0,其
位置在接触中心O处。所以接触区的压力 分布q的积分可以表达为(见图4):
q0 q ds a F F
a 2
2
r sin
2 2
式中F是虚线半圆的面积,a 是接触圆半径。 积分表达式是把接触压力沿弦 mn 进行积分, 可以求得。 将上述方程代入到方程(19)式,得:
Hertz弹性接触理论
1. 2. 3. 4. 5.
弹性力学基础理论
空间轴对称问题的基本微分方程
空间轴对称问题
弹性接触问题(Hertz弹性接触理论) 一般接触问题
弹性力学的应力与应变关系
在弹性力学中假设物体是均匀、连续、 和各向同性的,应力和应变的关系只决 定于物体的物理性质,所以弹性力学与 塑性力学的主要区别主要是应力和应变 的关系定性。
Hertz假设接触表面的压应力分布为半椭 圆体。 (3)、静力平衡方程:根据接触表面压 应力分布规律求得表面接触压力所组成 的合力应等于外加载荷。 将上述三方面的方程表达式联合求 解,即可求得各种接触问题的公式。
现推导两个球体弹性接触时的公式。 设两圆球体的半径分别为R1、R2 。开 始时在公切平面上的0点相互接触,如 图3所示。
方向的应变,则有:
x = [x - (y +z )]/E
同理可以得到 y轴和 z轴方向的应变。
剪应变与剪应力的关系
同样的方法可以得出剪应变与剪应力的 关系表达式:
xy =
xy
/G
式中G为剪切弹性模量。