(数学补充)柱坐标系、球坐标系与直角坐标系之间单位矢量的转换
直角坐标球坐标柱坐标的转化
直角坐标球坐标柱坐标的转化1. 直角坐标系在三维空间中,直角坐标系是最为常见和直观的坐标系表示方法之一。
通过三个互相垂直的轴来定位点的位置,分别是x轴、y轴和z轴,通常用(x, y, z)的形式表示点的坐标。
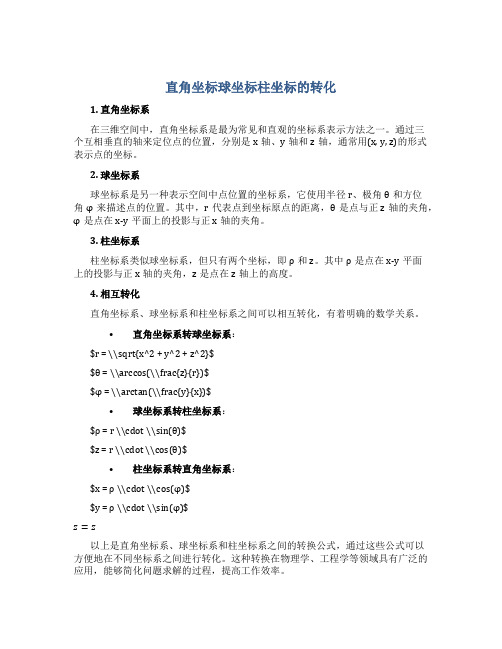
2. 球坐标系球坐标系是另一种表示空间中点位置的坐标系,它使用半径r、极角θ和方位角φ来描述点的位置。
其中,r代表点到坐标原点的距离,θ是点与正z轴的夹角,φ是点在x-y平面上的投影与正x轴的夹角。
3. 柱坐标系柱坐标系类似球坐标系,但只有两个坐标,即ρ和z。
其中ρ是点在x-y平面上的投影与正x轴的夹角,z是点在z轴上的高度。
4. 相互转化直角坐标系、球坐标系和柱坐标系之间可以相互转化,有着明确的数学关系。
•直角坐标系转球坐标系:$r = \\sqrt{x^2 + y^2 + z^2}$$θ = \\arccos(\\frac{z}{r})$$φ = \\arctan(\\frac{y}{x})$•球坐标系转柱坐标系:$ρ = r \\cdot \\sin(θ)$$z = r \\cdot \\cos(θ)$•柱坐标系转直角坐标系:$x = ρ \\cdot \\cos(φ)$$y = ρ \\cdot \\sin(φ)$z=z以上是直角坐标系、球坐标系和柱坐标系之间的转换公式,通过这些公式可以方便地在不同坐标系之间进行转化。
这种转换在物理学、工程学等领域具有广泛的应用,能够简化问题求解的过程,提高工作效率。
5. 总结直角坐标系、球坐标系和柱坐标系是描述点在空间中位置的常用数学工具,它们之间的转换关系在解决复杂问题时能够提供便利。
合理地运用这些坐标系相互转化的方法,可以更有效地解决空间中点位置相关的问题,为科学研究和工程实践带来便利。
直角坐标系转换成圆柱坐标系单位坐标矢量
直角坐标系转换成圆柱坐标系单位坐标矢量直角坐标系和圆柱坐标系是数学中常见的两种坐标系。
在进行几何或物理问题的分析和计算时,我们经常需要在不同坐标系之间进行转换。
本文将重点介绍如何将直角坐标系中的单位坐标矢量转换为圆柱坐标系中的单位坐标矢量。
直角坐标系直角坐标系是平面几何中常见的坐标系,它由x轴和y轴组成,其中原点为坐标系的起点。
我们可以使用(x, y)来表示该坐标系中任意一点的位置。
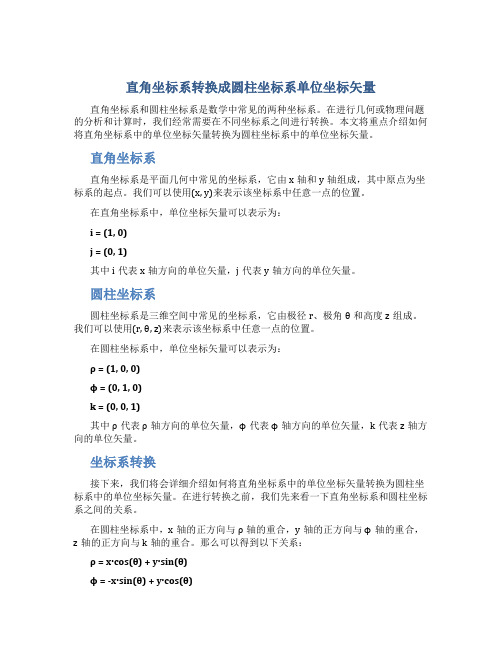
在直角坐标系中,单位坐标矢量可以表示为:i = (1, 0)j = (0, 1)其中i代表x轴方向的单位矢量,j代表y轴方向的单位矢量。
圆柱坐标系圆柱坐标系是三维空间中常见的坐标系,它由极径r、极角θ和高度z组成。
我们可以使用(r, θ, z)来表示该坐标系中任意一点的位置。
在圆柱坐标系中,单位坐标矢量可以表示为:ρ = (1, 0, 0)ϕ = (0, 1, 0)k = (0, 0, 1)其中ρ代表ρ轴方向的单位矢量,ϕ代表ϕ轴方向的单位矢量,k代表z轴方向的单位矢量。
坐标系转换接下来,我们将会详细介绍如何将直角坐标系中的单位坐标矢量转换为圆柱坐标系中的单位坐标矢量。
在进行转换之前,我们先来看一下直角坐标系和圆柱坐标系之间的关系。
在圆柱坐标系中,x轴的正方向与ρ轴的重合,y轴的正方向与ϕ轴的重合,z轴的正方向与k轴的重合。
那么可以得到以下关系:ρ = x·cos(θ) + y·sin(θ)ϕ = -x·sin(θ) + y·cos(θ)z = z通过对上述关系进行求导,我们可以得到单位坐标矢量之间的转换关系。
单位坐标矢量的转换如下:ρ = i·cos(θ) + j·sin(θ)ϕ = -i·sin(θ) + j·cos(θ)k = k示例为了更好地理解直角坐标系到圆柱坐标系单位坐标矢量的转换过程,我们来看一个示例。
假设有一个点P在直角坐标系中的位置为(3, 4),我们需要将该点的单位坐标矢量转换为圆柱坐标系中的单位坐标矢量。
(数学补充)柱坐标系、球坐标系与直角坐标系之间单位矢量的转换
er r
0,
e 0, r
e 0 r
er
e ,
e
er ,
e 0
er
e sin ,
e
e cos ,
e
er sin e cos
7、球坐标系中两矢量间的夹角公式
cos cos1 cos 2 sin1 sin 2 cos(1 2 )
A
B
C
B
C
A
C
A
B
以A、B、C为棱的平行六面体的
Ax Ar sin cos A cos cos A sin
Ay
Ar
sin
sin
A
cos
sin
A
cos
Az
Ar
cos
A
sin
Ar Ax sin cos Ay sin sin Az cos
A
Ax cos cos
A
cos sin
Az sin
A
Ax sin
Ay cos
6、球坐标系单位矢量的偏导数
z
x 2 y 2 z 2
tan 1
y x
er ex sin cos ey sin sin ez cos
e
ex cos cos
ey cos sin
ez sin
e ex sin ey cos
、球坐标系与笛卡儿坐标系中矢量的坐标变换
A Axex Ayey Az ez Ar er A e A e
r
e
1 r
e
1
r sin
u
er
u r
e
1 r
u
e
1
r sin
u
1
直角坐标与柱坐标球坐标的互化方法
直角坐标与柱坐标球坐标的互化方法1. 引言在数学和物理学中,常常需要在不同的坐标系下描述和计算空间中的点或向量。
而直角坐标系、柱坐标系和球坐标系是最常用的三种坐标系。
本文将介绍如何在直角坐标系和柱坐标、球坐标系之间进行转换,帮助读者更好地理解和应用这些坐标系。
2. 直角坐标系直角坐标系是最常见的坐标系,使用x、y和z坐标轴来描述空间中的点。
以原点(0, 0, 0)为起点,x轴正方向为正,y轴正方向为正,z轴正方向为正。
给定一个点P在直角坐标系下的坐标为(Px, Py, Pz)。
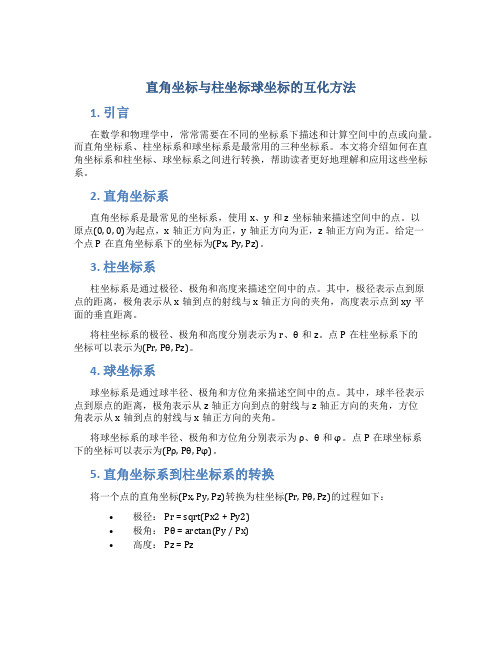
3. 柱坐标系柱坐标系是通过极径、极角和高度来描述空间中的点。
其中,极径表示点到原点的距离,极角表示从x轴到点的射线与x轴正方向的夹角,高度表示点到xy平面的垂直距离。
将柱坐标系的极径、极角和高度分别表示为r、θ和z。
点P在柱坐标系下的坐标可以表示为(Pr, Pθ, Pz)。
4. 球坐标系球坐标系是通过球半径、极角和方位角来描述空间中的点。
其中,球半径表示点到原点的距离,极角表示从z轴正方向到点的射线与z轴正方向的夹角,方位角表示从x轴到点的射线与x轴正方向的夹角。
将球坐标系的球半径、极角和方位角分别表示为ρ、θ和φ。
点P在球坐标系下的坐标可以表示为(Pρ, Pθ, Pφ)。
5. 直角坐标系到柱坐标系的转换将一个点的直角坐标(Px, Py, Pz)转换为柱坐标(Pr, Pθ, Pz)的过程如下:•极径: Pr = sqrt(Px2 + Py2)•极角:Pθ = arctan(Py / Px)•高度: Pz = Pz6. 柱坐标系到直角坐标系的转换将一个点的柱坐标(Pr, Pθ, Pz)转换为直角坐标(Px, Py, Pz)的过程如下:•x坐标:Px = Pr * cos(Pθ)•y坐标: Py = Pr * sin(Pθ)•z坐标: Pz = Pz7. 直角坐标系到球坐标系的转换将一个点的直角坐标(Px, Py, Pz)转换为球坐标(Pρ, Pθ, Pφ)的过程如下:•球半径:Pρ = sqrt(Px2 + Py2 + Pz2)•极角:Pθ = arccos(Pz / Pρ)•方位角:Pφ = arctan(Py / Px)8. 球坐标系到直角坐标系的转换将一个点的球坐标(Pρ, Pθ, Pφ)转换为直角坐标(Px, Py, Pz)的过程如下:•x坐标:Px = Pρ * sin(Pθ) * cos(Pφ)•y坐标:Py = Pρ * sin(Pθ) * sin(Pφ)•z坐标:Pz = Pρ * cos(Pθ)9. 结论本文介绍了直角坐标系、柱坐标系和球坐标系的基本概念,以及它们之间的转换方法。
柱坐标系、球坐标系与直角坐标系之间矢量的转换

tan 1
y x
er e
ex ex
sin cos ey sin sin ez cos cos cos ey cos sin ez sin
e ex sin ey cos
A Axex Ayey Azez Ar er A e A e
Ax Ar sin cos A cos cos A sin
f
f
fg
f
g
f gffgg
f
g
g
f
f
g
g
f
fg
f
f
f
S
f
ds
V
f dV
L
f
dl
S
f
ds
S ds V 2 dV S ds V 2 2 dV
r r
rr 0
r 3
f r f
'
r
r
1 r r r3
f rr 0
2 1 rr 4r
r
r3
r r3
0
ei a r i aei a r
av rv ar rv av
ex
x
ey
y
ez
z
ex
x
ey
y
ez
z
A
Ax
Ay
Az
x y z
ex ey ez
A
x y z
2 2 2 2
x 2 y 2 z 2
Ax Ay Az
2A
2 Ax
ex
2 Ay
2A
2
Ar
er
2
A
e
2 A
e
其中
2A r
2 Ar
2 r2
柱坐标系、球坐标系与直角坐标系之间单位矢量的转换 PPT

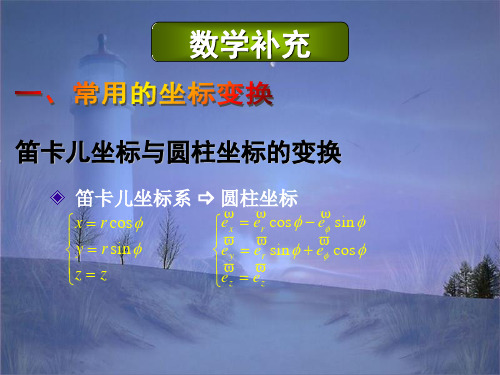
笛卡儿坐标系 圆柱坐标
x r cos
ex er cos e sin
y
r
sin
ey er sin e cos
z z
ez ez
圆柱坐标 笛卡儿坐标系
r x2 y2
tan 1 y
x
z
z
er ex coseysin e ex siney cos
ez ez
A A x e x A y e y A z e z A r e r A e A z e z
定义:标量场中的某点上定义一个矢量,其方向为 函数在该点变化率最大的方向,其大小等于这个最 大变化率的值,这个矢量叫做函数在该点的梯度。
函数在该点附近沿 l 方向的增量为
dr g r r a d l d
fd if v
fro f t
grad
2
2 f f f
f f 2 f
f g f g f g g f f g g f f g
f f f
Sf d s V f dV
Lf d l S f d s
S d s V 2 dV
Ax Ar cos A sin Ay Ar sin A cos
Az Az
Ar Ax cos Ay sin A Ax sin Ay cos
Az Az
er
er
r er z
e , e
r e
z
e
er ,
ez 0 r
ez 0 z
ez 0
x r sin cos 源自A A x e x A y e y A z e z A r e r A e A e
Ax Ars incosAcoscosAs in Ay Ars ins inAcoss inAcos Az ArcosAs in
矢量的坐标变换
y
aˆ aˆy aˆr
求:变换到直角坐标系中, A 的表达式。
aˆx r
解:根据题意,在直角坐标系中
o
x
Ax A aˆx (raˆ zaˆz) aˆx raˆ aˆx r sin
Ay A aˆy (raˆ zaˆz) aˆy raˆ aˆy r cos
Az A aˆz (raˆ zaˆz) aˆz zaˆz aˆz z
0 1 z
在直角坐标系中
Ax r sin y
Ayr cos x
Az z
得到: A yaˆx xaˆy zaˆz
2. 球坐标系与直角坐标系的变换 (1)坐标变量的变换关系
直角坐标系: ( x, y, z) 球坐标系: (R, ,)
x Rsin cos y Rsin sin z Rcos
z p
R
o
y
x
球坐标系: (R, ,) 直角坐标系: ( x, y, z)
R x2 y2 z2
arccos[
z
]
x2 y2 z2
arctan( y )
x
z
p
R o
y
x
(2)矢量函数在两坐标系中的变换
矢量 A 在直角坐标系: A Axaˆx Ayaˆy A azˆ z
其中:Ax, Ay , Az 是 (x, y, z) 的函数。
矢量 A 在球坐标系: A ARaˆR Aaˆ Aaˆ
其中:AR, A, A是 (R, ,) 的函数。
z aˆR
p aˆ
R aˆ o
y
x
利用矢量点积的定义:
AR A aˆR (Axaˆx Ayaˆy Azaˆz) aˆR Axaˆx aˆR Ayaˆy aˆR AzaˆzaˆR
1.2 三种常用坐标系中的矢量场
三维空间任意一点的位置可通过三条相互正交线 的交点来确定。 三条正交线组成的确定三维空间任意点位置的体 系,称为正交坐标系;三条正交线称为坐标轴;描述 坐标轴的量称为坐标变量。
在电磁场与波理论中,三种常用的正交坐标系为:
直角坐标系、柱坐标系和球坐标系。
09:39:28
1
1.2 三种常用的正交坐标系
A cos sin 0 Ax A sin cos 0 Ay A 0 0 1 Az z
1.2 三种常用的正交坐标系
柱坐标系下的矢量运算:
A A e A e Az e z
Ar sin cos sin sin cos Ax A cos cos cos sin sin Ay A cos 0 7 sin Az
加减:A B e ( A
B B e B e Bz e z
B ) e ( A B ) e z ( Az Bz )
标积:A B ( A e A e Az e z ) ( B e B e Bz e z )
r , ,
er , e , e
e e er e e
矢量表示: A Ar er A e A e
位置矢量 线元矢量
面元矢量
r er r
dr er dr e rd e rsin d
dS e dlr dl e rdrd dS e dlr dl ez rsin drd dSr er dl dl er r 2sin d d
球坐标和柱坐标的转换
球坐标和柱坐标的转换球坐标和柱坐标是三维空间中常用的坐标系,它们和直角坐标系是相互转换的。
本文将介绍球坐标和柱坐标的定义以及它们之间的转换方法。
球坐标球坐标系是一种描述空间中点的坐标系,它用半径(r)、极角(θ)和方位角(φ)来描述点的位置。
半径(r)表示点到坐标系原点的距离,极角(θ)表示点与z轴的夹角,方位角(φ)表示点在xy平面的投影与x轴的夹角。
球坐标的坐标表示为:(x, y, z) = (r * sinθ * cosφ, r * sinθ * sinφ, r * cosθ)柱坐标柱坐标系是一种描述空间中点的坐标系,它用半径(ρ)、极角(θ)和高度(z)来描述点的位置。
半径(ρ)表示点到柱坐标系极轴的距离,极角(θ)表示点与柱坐标极轴的夹角,高度(z)表示点在z轴上的坐标。
柱坐标的坐标表示为:(x, y, z) = (ρ * cosθ, ρ * sinθ, z)球坐标转换为柱坐标球坐标系和柱坐标系之间的转换是通过数学公式进行的。
球坐标转换为柱坐标的公式如下:ρ = r * sinθz = r * cosθ柱坐标转换为球坐标柱坐标转换为球坐标的公式如下:r = √(ρ^2 + z^2)θ = arctan(ρ / z)总结球坐标和柱坐标是三维空间中常用的坐标系,它们的转换可以通过数学公式进行。
球坐标由三个参数(半径、极角和方位角)表示,柱坐标由三个参数(半径、极角和高度)表示。
通过球坐标转换为柱坐标,可以得到柱坐标系中的坐标值,同样地,通过柱坐标转换为球坐标,可以得到球坐标系中的坐标值。
以上是球坐标和柱坐标的定义以及它们之间的转换方法的介绍。
了解球坐标和柱坐标的概念及其转换方法,有助于我们更好地理解和应用三维空间中的坐标系统。
圆柱坐标系和球坐标系单位矢量关系怎么求
圆柱坐标系和球坐标系单位矢量关系怎么求圆柱坐标系和球坐标系是两种常用于描述三维空间中点的坐标系统。
在这两种坐标系统中,单位矢量是非常重要的概念,它们可以用来表示坐标系中任意一点的方向。
本文将介绍如何求解圆柱坐标系和球坐标系中的单位矢量关系。
1.圆柱坐标系单位矢量关系的求解在圆柱坐标系中,一个点的位置由距离原点的径向距离(r),与正 x 轴的夹角(θ),以及 z 轴的高度(z)三个参数来表示。
单位矢量可以帮助我们确定坐标系中的方向。
单位矢量的求解可以通过对坐标系中的参数进行偏微分来实现。
在圆柱坐标系中,单位矢量可以表示为以下形式:$$\\hat{r} = \\frac{i \\cdot \\partial r}{\\sqrt{(\\partial r)^2 + (\\partial\\theta)^2 + (\\partial z)^2}}$$$$\\hat{\\theta} = \\frac{j \\cdot \\partial \\theta}{\\sqrt{(\\partial r)^2 + (\\partial \\theta)^2 + (\\partial z)^2}}$$$$\\hat{z} = \\frac{k \\cdot \\partial z}{\\sqrt{(\\partial r)^2 + (\\partial\\theta)^2 + (\\partial z)^2}}$$其中,$\\hat{r}$、$\\hat{\\theta}$、$\\hat{z}$分别表示径向、角向和高度方向的单位矢量。
i、j、k分别表示 x、y、z轴的单位矢量。
2.球坐标系单位矢量关系的求解在球坐标系中,一个点的位置由距离原点的半径(r),与正x 轴的夹角(θ),以及与正 z 轴的夹角(φ)三个参数来表示。
单位矢量同样可以帮助我们确定坐标系中的方向。
单位矢量的求解可以使用与圆柱坐标系类似的方法,也是对坐标系中的参数进行偏微分。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2A
2
Ar
er
2
A
e
2 A
e
其中
2A r
2 Ar
2 r2
Ar
1
sin
sin A
1
sin
A
2A
2 A
2 r2
Ar
A
2sin 2
cos sin 2
A
2A
2 A
2
r 2 sin
Ar
ctg
A
2
A sin
f
f
fg
f
g
f gffgg
f
g
g
f
f
g
g
f
fg
f
f
f
S
f
ds
V
f dV
L
f
dl
S
f
ds
S ds V 2 dV S ds V 2 2 dV
r r
rr 0
r 3
f r f
'
r
r
1 r r r3
f rr 0
2 1 rr 4r
函数在该点附近沿 l 方向的增量为
d r
grad
r
d
l
f div f
f rot f
grad
2
2 f f f
f
f
2
f
0
f 0
F fv gv Ffvgv
gv
fv
v f
gv
gv
v f
f
g
f
g
f
ey
2 Az
ez
er
r
e
1 r
ez
z
A
1 r
r
rAr
1 r
A
Az z
u
er
u r
e
1 r
u
ez
u z
er r
e
ez r
A
r z
2u
1 r
r r
u r
1 r2
2u
2
2u z 2
2A
2
Ar
er
2
A
e
2
A
z
ez
Ar rA Az
er
r
e
1 r
r
sin
sin
z r cos
ex er sin cos e cos cos e sin
ey
er sin
sin
e
cos
sin
e
cos
ez er cos e sin
r x 2 y 2 z 2
cos1
z
x 2 y 2 z 2
tan 1
y x
er e
ex ex
= evz
+ev y sinj +evy cosj
v A
=
Axevx
+
Ayevy
+
Azevz
=
Arevr
+
Aj
evj
+ Azevz
ì ïïí ï
Ax Ay
= =
Ar Ar
cosj sinj
ïî Az = Az
- Aj sinj + Aj cosj
ì ïïí ï
Ar Aj
= Ax cosj = - Ax sinj
Ay
Ar
sin
sin
A
cos
sin
A
cos
Az
Ar
cos
A
sin
Ar Ax sin cos Ay sin sin Az cos
A
Ax cos cos A
cos sin Az sin
A
Ax sin
Ay
cos
err r err
err
0,
er ,
f dl
rot f
n
lim S 0
L
S
面元的法线方向与沿边界的绕行方向成右手螺旋 关系。 上式表明:旋度矢量在任一方向上的投影,等于 该方向上的环量面密度。
定义:标量场中的某点上定义一个矢量,其方向为 函数在该点变化率最大的方向,其大小等于这个最 大变化率的值,这个矢量叫做函数在该点的梯度。
r
r3
r r3
0
ei a r i aei a r
av rv ar rv av
ex
x
ey
y
ez
z
ex
x
eyyezz NhomakorabeaA
Ax
Ay
Az
x y z
ex ey ez
A
x y z
2 2 2 2
x 2 y 2 z 2
Ax Ay Az
2A
2 Ax
ex
2 Ay
sin cos ey sin sin ez cos cos cos ey cos sin ez sin
e ex sin ey cos
A Axex Ayey Azez Ar er A e A e
Ax Ar sin cos A cos cos A sin
+ Ay sinj + Ay cosj
ïî Az = Az
ì ï
抖evr
ï 抖j
= evj
,
¶ evj j
= - evr ,
evz ?j
=0
ï ïïí ï
抖evr 抖r
¶ =
evj r
=
evz ?r
=0
ï ï ï ïî
抖evr 抖z
¶ =
evj z
=
evz ?z
=0
x r sin cos
y
B
C
A
C
B
A
B
C
A
B
C
A
C
B
B
C
A
定义:设闭合曲面S 包围着体积V ,穿过S 的 矢量场的通量与V 之比,在V 0 时的极限称
为矢量场的散度。
div f lim
S f dS
V 0 V
dS 的正方向沿S 的外法线方向。
定义:在矢量场的某点上定义一个矢量,其方向为 该点有最大环量面密度的方向,其大小等于这个最 大环量面密度的值,这个矢量叫做该点的旋度。
e
1
r sin
u
er
u r
e
1 r
u
e
1
r sin
u
A
1 r2
r
r 2 Ar
1
r sin
sin A
1
r sin
A
er
e
e
r 2 sin r sin
r
A
r
Ar
rA
r sin A
2u
1 r2
r
r 2
u r
1
r 2 sin
sin
u
r2
1 sin
2
2u
2
数学补充
笛卡儿坐标系 圆柱坐标
x r cos
ex er cos e sin
y
r
sin
ey er sin e cos
z z
ez ez
圆柱坐标 笛卡儿坐标系
ì ï
r
=
x2 + y2
ïí f ( = tan- 1 y x)
ï
ïz=z
î
ì ïïí ï ïî
evr evj
evz
= evx cosj = - evx sinj
r e
sin
,
er r er
er
0,
er 0
r
err ,
er 0
r e
cos
,
er
err sin
r e
cos
cos cos1 cos2 sin 1 sin 2 cos(1 2 )
A
B
C
B
C
A
C
A
B
Ax Ay Az
A B C Bx By Bz Cx Cy Cz
A