基于simulink的回路仿真
基于Simulink的脉冲发生器仿真及脉宽调整
87收稿日期:2018-03-12作者简介:梁红卫(1967—),女,河南驻马店人,本科,工程师,教学部长,研究方向:电工电子、电气、机电一体化。
1 引言脉冲波形在电力负荷控制终端的检测、电路测试与维修以及雷达和通信等领域有着广泛的应用[1-2]。
因此,有关脉冲发生器的设计及其脉冲宽度调整电路分析在电子电工课程中具有十分重要的地位。
实际教学中,通过使用示波器直接测量脉冲发生器电路板各个测量点的电压波形,使学生掌握各个器件的特性和脉冲波形的产生过程。
尽管基于实际电路板的测量方法简单,但是电路设计的灵活性欠缺、实验成本高、效率低。
采用计算机仿真是解决这一问题的有效办法。
基于Simulink/Simscape的电路仿真,不仅可以通过物理仿真模块搭建控制灵活的仿真系统[3-4],而且可激发学生对问题本质的探究,具有教学成本低、学习效率高等一系列优势。
本文提出一种基于Simulink/Simscape平台的脉冲波形发生器,并对脉冲宽度进行调整。
根据Simscape工具箱中提供物理模型模块,结合各模块的连接关系,构建脉冲波形发生器电路,以直观形象的方式演示脉冲波形受电容和电阻变化的影响情况。
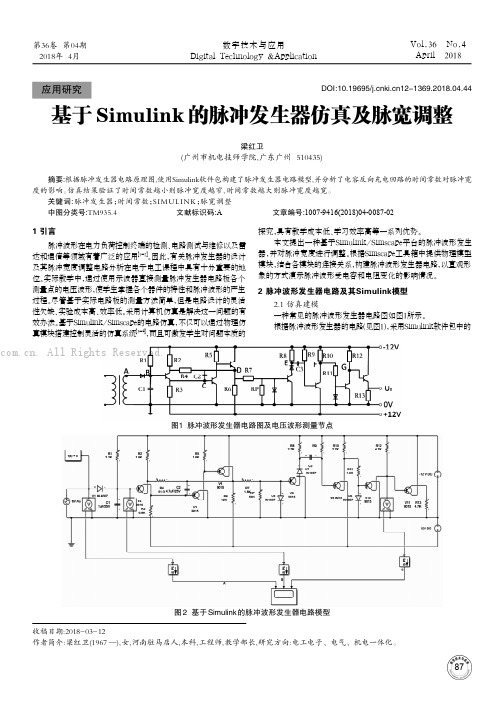
2 脉冲波形发生器电路及其Simulink模型2.1 仿真建模一种常见的脉冲波形发生器电路图如图1所示。
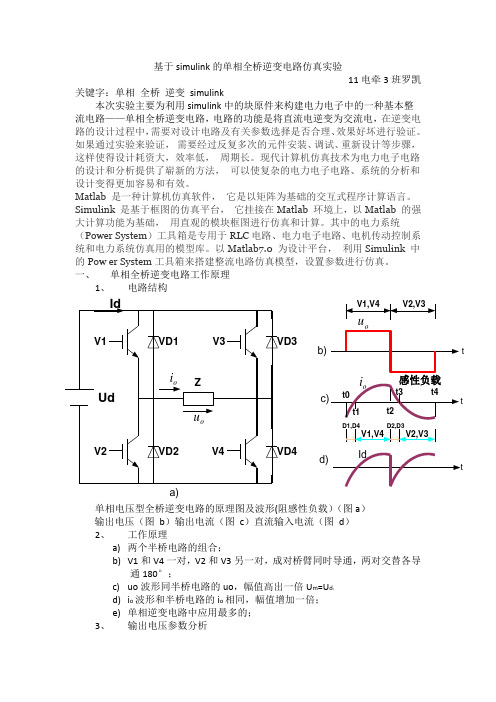
根据脉冲波形发生器的电路(见图1),采用Simulink软件包中的基于Simulink 的脉冲发生器仿真及脉宽调整梁红卫(广州市机电技师学院,广东广州 510435)摘要:根据脉冲发生器电路原理图,使用Simulink软件包构建了脉冲发生器电路模型,并分析了电容反向充电回路的时间常数对脉冲宽度的影响。
仿真结果验证了时间常数越小则脉冲宽度越窄,时间常数越大则脉冲宽度越宽。
关键词:脉冲发生器;时间常数;SIMUL INK;脉宽调整中图分类号:TM935.4文献标识码:A 文章编号:1007-9416(2018)04-0087-02应用研究DOI:10.19695/12-1369.2018.04.44图2 基于Simulink 的脉冲波形发生器电路模型图1 脉冲波形发生器电路图及电压波形测量节点. All Rights Reserved.88第 36 卷 数字技术与应用 A Simulation of the Pulse Generator Based on Simulink and Adjusting the PulseWidthLIANG Hong-wei(Guangzhou Electromechanical Technician College,Guangzhou Guangdong 510435)Abstract:A model of the pulse generator is constructed by using the Simulink package in term of the circuit diagram of the pulse generator. The effect of the time constant of capacitor reverse charging circuit on pulse width is also analyzed. Results of simulation demonstrate that, the smaller the time constant, the narrower the pulse width; the larger the time constant, the wider the pulse width.Key words:pulse generator; time constant; Simulink; pulse width adjustmentSimscape工具箱将其建模如图2所示。
基于Simulink的三相逆变SVPWM的仿真实现(精)

Simulink 是MTALAB 最重要的组件之一,它提供一个动态系统建模、仿真和综合分析的集成环境。
在实际设计之前利用Simulink 进行仿真不仅可以降低设计成本,还能及时发现设计中存在的问题,加以改正。
本文给出了基于Simulink 的SVPWM控制策略仿真的全过程和结果。
1SVPWM 的原理介绍SVPWM ,即空间电压矢量控制法,它的主要思想[1]是以三相对称正弦波电压供电时三相对称电动机定子理想磁链圆为参考标准,以三相逆变器不同开关模式作适当的切换,从而形成PWM 波,以所形成的实际磁链矢量来追踪其准确磁链圆。
传统的SPWM 方法从电源的角度出发,以生成一个可调频调压的正弦波电源,而空间电压矢量控制法将逆变系统和异步电机看作一个整体来考虑,模型比较简单,也便于微处理器的实时控制。
相比于传统的SPWM 法,SVPWM 有如下特点[2]:1)在每个小区间虽有多次开关切换,但每次开关切换只涉及一个器件,所以开关损耗小。
2)利用电压空间矢量直接生成三相PWM 波,计算简单。
3)逆变器输出线电压基波最大值为直流侧电压,比一般的SPWM 逆变器输出电压高15%SVPWM 控制的实现[3]通常有以下几步:(1)坐标的变换三相逆变系统有三组桥臂,设a 、b 、c 分别表示三组桥臂的开关状态,上桥臂导通下桥臂关断时其值为1,反之则为0。
那么可以得到三相逆变器输出的相电压和线电压之间的关系如下:V a V b V c 22222222=V dc 2-1-1-12-1-1-1222a b 22c(1)其中,V dc 为逆变桥直流电压,令U=[a,b ,c]表示一个矢量,当a 、b 、c 分别取1或者0的时候,该矢量就有8中工作状态,分别为[0,0,0],[0,0,1],[0,1,0],[0,1,1],[1,0,0],[1,0,1],[1,1,0],[1,1,1],如果我们用U 0和U 7表示零矢量,就可以得到6个扇区,三相控制可以用一个角速度为W=2πF 的空间矢量电压U 表示,当U 遍历圆轨迹时,形成三相瞬时输出电压,理论证明,当U 落入某一扇区后,用该扇区两边界矢量和零矢量去合成U 可以得到最佳合成效果。
基于simulink的单相全桥逆变电路仿真实验
基于simulink 的单相全桥逆变电路仿真实验11电牵3班罗凯关键字:单相 全桥 逆变 simulink本次实验主要为利用simulink 中的块原件来构建电力电子中的一种基本整流电路——单相全桥逆变电路,电路的功能是将直流电逆变为交流电,在逆变电路的设计过程中,需要对设计电路及有关参数选择是否合理、效果好坏进行验证。
如果通过实验来验证, 需要经过反复多次的元件安装、调试、重新设计等步骤, 这样使得设计耗资大,效率低, 周期长。
现代计算机仿真技术为电力电子电路的设计和分析提供了崭新的方法, 可以使复杂的电力电子电路、系统的分析和设计变得更加容易和有效。
Matlab 是一种计算机仿真软件, 它是以矩阵为基础的交互式程序计算语言。
Simulink 是基于框图的仿真平台, 它挂接在Matlab 环境上,以Matlab 的强大计算功能为基础, 用直观的模块框图进行仿真和计算。
其中的电力系统(Power System )工具箱是专用于RLC 电路、电力电子电路、电机传动控制系统和电力系统仿真用的模型库。
以Matlab7.0 为设计平台, 利用Simulink 中的Pow er System 工具箱来搭建整流电路仿真模型,设置参数进行仿真。
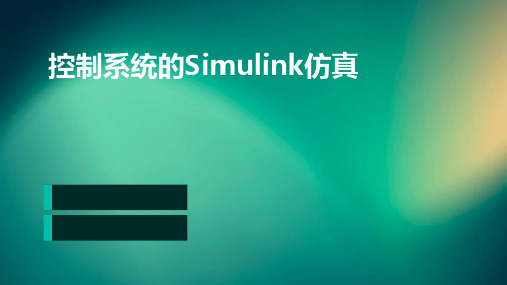
一、 单相全桥逆变电路工作原理1、 电路结构单相电压型全桥逆变电路的原理图及波形(阻感性负载)(图a) 输出电压(图 b )输出电流(图 c )直流输入电流(图 d ) 2、 工作原理a)两个半桥电路的组合;b) V1和V4一对,V2和V3另一对,成对桥臂同时导通,两对交替各导通180°;c) uo 波形同半桥电路的uo ,幅值高出一倍U m =U d ; d) i o 波形和半桥电路的i o 相同,幅值增加一倍; e) 单相逆变电路中应用最多的; 3、 输出电压参数分析a)tb)c)d)tuo 成傅里叶级数基波幅值基波有效值当uo 为正负各180°时,要改变输出电压有效值只能改变Ud 来实现 4、 移相调压方式(通过逆变器本身开关控制,适用于单相)图示单相全桥逆变电路的移相调压方式可采用移相方式调节逆变电路的输出电压,称为移相调压各栅极信号为180°正偏,180°反偏,且V 1和V 2互补,V 3和V 4互补关系不变但V 3的栅极信号只比V 1落后q ( 0<q <180°)u o 成为正负各为q 的脉冲,改变q 即可调节输出电压有效值 uo 成傅里叶级数输出电压的有效值:⎪⎭⎫ ⎝⎛+++= t t t U u ωωωπ5sin 513sin 31sin 4d o ddo1m 27.14U U U ==πdd1o 9.022U U U ==πa)b)图5-7VD 3VD 4u u u u i o u od o 1,3,54sin sin 2n U n u n t n θω∞==π∑o dU U =基波有效值随着θ 的变化,谐波幅值也发生变化,特别是当θ 较小时,较低次的谐波幅值将与基波的幅值相当,所以,这种调压方式不适合大范围的调压。
simulink电路仿真

求i3,U4,U7; , , ;
1. Simulink常用模块介绍 常用模块介绍 要熟练地使用Simulink进行仿真,首先要求能够熟练 进行仿真, 要熟练地使用 进行仿真 使用Simlink 常用模块。在模块浏览器中的 常用模块。在模块浏览器中的Simulink节点 使用 节点 下包含了搭建一个Simulink模块所需要的基本模块。本节 模块所需要的基本模块。 下包含了搭建一个 模块所需要的基本模块 主要对其中的Sources模块库、Sinks 模块库、Math 模块库、 模块库、 主要对其中的 模块库 Operations库和 库和Continuous模块库中的常用模块进行介 库和 模块库中的常用模块进行介 绍。 Sources 模块 阶跃函数,起始时间是第1秒而非 秒而非0秒 双击step 阶跃函数,起始时间是第 秒而非 秒。双击 模块,对仿真起始时间(step time)和阶跃值 和阶跃值(Initial value, 模块,对仿真起始时间 和阶跃值 Final value)的大小进行设置。 的大小进行设置。 的大小进行设置 信号发生器, 信号发生器,可以产生给定频率和幅值的正 弦波(sine wave)、方波 弦波 、方波(square wave)和锯齿波 和锯齿波 (sawtooth wave),双击图标可以设置。 ,双击图标可以设置。
Simulink电路仿真 电路仿真
Simulink 是MATLAB 的一个重要的工具箱,是结合了框图 的一个重要的工具箱, 界面和交互仿真能力的系统级设计和仿真工具。它以MATLAB 界面和交互仿真能力的系统级设计和仿真工具。它以 核心数学,图形和语言为基础,可以让用户完成从算法开发, 核心数学,图形和语言为基础,可以让用户完成从算法开发, 仿真或者模型验证的全过程,而不需要传递数据, 仿真或者模型验证的全过程,而不需要传递数据,重写代码或 改变软件环境。 改变软件环境。 进入Simulink菜单,选择 Simulink Library 菜单, 在start进入 进入 菜单 Browser,打开 库函数, 打开编辑窗口。 ,打开Simulink库函数,选择 File New打开编辑窗口。 库函数 打开编辑窗口 窗口直接键入Simulink即可打 在MATLAB的 Command窗口直接键入 的 窗口直接键入 即可打 工作窗口。 开Simulink工作窗口。 工作窗口 Simulink 作为面向框图的仿真软件,具有以下的功能和 作为面向框图的仿真软件, 优点: 优点: (1)用方框图的绘制代替了程序的编写。构成任何一个系统框 )用方框图的绘制代替了程序的编写。 图有三个步骤, 选定典型环节,相互联结和给定环节参数。 图有三个步骤,即选定典型环节,相互联结和给定环节参数。 (2)仿真的建立和运行是智能化的。首先,画好了框图并存起 )仿真的建立和运行是智能化的。首先, 自动建立一个仿真的过程; 来,Simulink自动建立一个仿真的过程;其次,在运行时用户 自动建立一个仿真的过程 其次, 可以不给步长,只给出要求的仿真精度, 可以不给步长,只给出要求的仿真精度,软件会自动选择能保 证给定精度的最大步长, 证给定精度的最大步长,使得在给定的精度要求下系统仿真具 有最快的速度。 有最快的速度。
基于SIMULINK的整流电路的设计与仿真研究

基于SIMULINK的整流电路的设计与仿真研究摘要:MA TLAB是一种科学计算软件,它是一种以矩阵为基础的交互式程序计算语言。
SIMULINK是基于框图的仿真平台,它挂接在MATLAB环境上,以MATLAB的强大计算功能为基础,以直观的模块框图进行仿真和计算。
本文主要以MA TLAB/SIMULINK仿真软件为基础,完成了对整流电路的建模与仿真,并且给出了仿真结果波形,同时根据仿真结果进行了分析和计算。
证实了该方法的简便直观、高效快捷和真实准确性。
关键字:MA TLAB/SIMULINK;建模;仿真;整流电路一、前言在电力电子电路如变流装置的设计过程中,需要对设计出来的初步方案及有关元件参数选择是否合理,效果如何进行验证。
采用MA TLAB/SIMULINK可视化图形化仿真环境来对电力电子电路进行建模仿真则可使之变得直观,简单易行,效率高且真实准确。
本课题主要研究的是利用MATLAB/SIMULINK建立电力电子电路仿真模型并进行仿真。
对单相整流电路和三相整流电路主要研究其半波可控和桥式全控整流电路,分别建立其Simulink仿真模型,进行系统仿真,对其仿真波形进行对比分析,并与理论结果进行对比。
利用Simulink中的模块库建立单相/三相整流电力变换电路,进行仿真后,对仿真波形进行比较分析,证实了该方法的简便直观、高效快捷和真实准确性。
由于计算机中修改参数方便,可以通过改变方针参数就可观察各种现象,加深了对其电路原理的理解。
同时,通过对本课题的研究最终能够熟悉并掌握Matlab /Simulink的应用环境,熟练应用Simulink模块库中模块建立电力电子电路的系统仿真模型,设定系统仿真参数,进行系统仿真。
二、实验研究与分析(一)单相可控整流电路的仿真1、单相半波可控整流电路单相桥式半控整流电路原理图如右图所示,电路由交流电源u1、整流变压器T、晶闸管VT、负载电阻R以及触发电路组成。
在变压器二次侧电压u2的正半周触发晶闸管VT,则在负载上可以得到方向不变的直流电,改变晶闸管的控制角可以调节输出直流电压和电流的大小。
控制系统的Simulink仿真
06 结论与展望
结论
控制系统Simulink仿真是一种有 效的工具,可用于模拟和分析各 种控制系统的性能。通过使用 Simulink,研究人员和工程师可 以轻松地构建和修改控制系统模 型,并使用各种仿真工具进行系 统分析和优化。
Simulink提供了广泛的模块库和 工具,可用于构建各种类型的控 制系统模型,包括线性、非线性、 离散和连续系统。这些模块可以 方便地组合和修改,以适应特定 的控制系统需求。
非线性系统仿真
总结词
对非线性系统的动态行为进行模拟的过程。
详细描述
非线性系统在Simulink中可以通过使用非线性模块进行模拟。非线性系统是指系统的 输出与输入不成比例的系统,例如某些电子设备或机械系统。在Simulink中,可以使 用非线性模块来模拟这些系统的行为,例如非线性增益、饱和等。通过调整模块参数,
• 未来,Simulink可能会引入更多先进的仿真技术和算法,以提高仿真精度和 效率。例如,基于模型的控制设计、自适应控制、预测控制等先进控制算法可 能会被集成到Simulink中,以提供更强大的分析和优化工具。
• 此外,随着物联网和智能制造等领域的快速发展,Simulink可能会扩展其模 块库和工具箱,以支持这些领域的控制系统建模和仿真。例如,增加与传感器 、执行器和其他智能设备的接口模块,以及支持实时仿真和嵌入式系统开发的 工具箱。
保障生产安全
控制系统能够及时检测和预防潜在的安全隐患, 降低事故发生的可能性。
3
节能减排
优化控制参数,降低能耗和排放,符合绿色环保 要求。
控制系统的发展历程
01
02
03
模拟控制系统
实验六 基于simulink的时分多路复用系统的仿真
实验六基于simulink的时分多路复用系统的仿真一、实验目的1、掌握时分复用的概念;2、理解时分复用的原理及简单实现方法;3、进一步熟悉simulink在通信系统中的使用2、实验原理抽样定理:一个频带限制在0到f m以内的低通模拟信号x(t),可以用时间上离散的抽样值来传输,抽样值中包含有x(t)的全部信息。
当抽样频率f s≧2f m时,可以从已抽样的输出信号中用一个带宽为f m≦B≦f s—f m的理想低通滤波器不失真地恢复出原始信号。
时分复用是建立在抽样定理基础上的。
抽样定理使连续(模拟)的基带信号有可能被在时间上离散出现的抽样脉冲值所代替。
这样,当抽样脉冲占据较短时间时,在单路抽样信号在时间上离散的脉冲间留出很大的空隙。
因此,可以在空隙中插入若干路其他抽样信号,只要各路抽样信号在时间上不重叠并且能区分开,那么一个信道就可以能同时传输多路信号,达到多路复用的目的。
这种多路复用技术称为时分多路复用,图6-1为基带信号的时分复用原理框图。
图6-1 基带信号时分复用原理假设有N路PCM信号进行时分多路复用,系统框图及波形如图6-2和图6-3所示。
各路信号首先通过相应的低通滤波器使之变为带线信号,然后送到抽样电子开关,电子开关每T s秒将各路信号依次抽样一次,这样N个样值按先后顺序错开插入抽样间隔T s,之内,最后得到的复用信号是N个抽样信号之和,其波形如图6-3所示。
各路信号脉冲间隔为T s,各路复用信号脉冲的间隔为T s /N。
由各个消息构成单一抽样的一组脉冲叫做一帧,一帧中相邻两个脉冲之间的时间间隔叫做时隙,未被抽样脉冲占用的时隙叫做保护时间。
图6-2 时分复用系统框图图1.3 时分复用波形(a)第一路波形(b)第二路波形(c)第三路波形(d)合成波形在接收端,合成的多路复用信号由与发送端同步的分路转换开关区分不同路的信号,把各路信号的抽样脉冲序列分离出来,再用低通滤波器恢复各路所用的信号。
基于MATLABsimulink的某电液比例调速阀控同步系统仿真
基于MATLAB/Simulink的某电液比例调速阀控同步系统仿真C液压缸总泄漏系数tpP液压缸负载压力L体积弹性模量eA液压缸有杆腔作用面积pq液压缸有杆腔和无杆腔作用面积之比B黏性阻尼系数PU为比例电磁铁初始电压,K为传感器及放大电路增益,fk为节流阀弹簧刚度,sK为比例电磁铁增益,ax为液压缸1输出位移。
1 概述同步系统是液压系统中实现多个执行元件的位移、力或速度相等的回路, 主要类型有机械同步回路、流量控制同步回路和容积控制同步回路等。
图1 系统原理图系统采用的同步回路如图1所示, 液压缸1、2的结构和参数完全相同, 缸1为主动缸, 用普通调速阀控制; 缸2为从动缸, 用电液比例调速阀控制。
位移传感器1和2分别对应地测量缸1和2的位移, 用两传感器测得的差值作为电液比例调速阀的控制信号, 控制液压缸2跟随液压缸1动作, 从而实现两缸同步动作。
液压缸1和2为非对称双作用液压缸。
液压缸伸出时, 供油压力即为系统压力, 回油经过调速阀, 液压缸两腔油压均较大。
液压缸缩回时, 回油压力可忽略, 数学模型较伸出时简单, 可参照出油数学模型构建其模型。
作者仅以液压缸伸出为例建立数学模型。
2 功率键合图本文章以液压缸1的输出作为整个系统的输入,即液压缸1输出唯一为已知,针对液压缸2伸出过程建立功率键合图如下:图2 液压缸2键合图1 )共势结,根据能量流的关系及容性元件C 的特性得下述关系:123L Q Q Q Q =-- (1)其中1.4e L eV V Q P C β∙==211112P q Q A v A v +==311Ltp L Q P C P R ==02(1)e s p V V q P A =+-⋅代入(1)式得:11 (42)e L tp L L P eV q Q C P P A v β∙+=++(2)对上式进行拉氏变换得:.(1).().().().()42e L tp L L P eV s q sQ s C P s P s A Y s β+=++(3)2) 共流结点根据惯性元件I 和转换器TF 的特征关系,得到下列关系式:21345F F F F F =--- (4)其中:2F m a = ; 110F P A =⋅ ;3F F = ;4P F B v =⋅ ;52p F P A =⋅;取(1)e s p F F q P A =--⋅以及12L P P P =- 1s P P = 代入上式得:P L p e m y B y P A F ∙∙∙+⋅=⋅- (5)对上式进行拉氏变换得:2()()()P p L e m s Y s B s Y s A P s F ⋅⋅+⋅⋅=⋅- (6)3 )系统流量方程L dt v Q C x =⋅ (7)阀芯位移方程:0[()]f v a sU K y x x K k --=⋅ (8)对以上两式进行拉式变化得:()()L dt v Q s C X s =⋅ (9)0()()()f af aav sssK K K K U K X s X s Y s k k k ⋅⋅⋅=+⋅-⋅ (10)4) 建立数学模型 联立(3)、(6)、(9)式,可得阀控缸的数学模型:假设液压缸为无阻尼缸, 忽略油液黏性阻尼, 则上式变换为:式中,为液压系统固有频率;为系统阻尼系数。
电机控制基于Simulink的仿真
控制系统 设计:用 于控制系 统的设计、 分析和优 化
THNK YOU
汇报人:
等
仿真结果分析: 分析仿真结果 包括步进电机 的转速、转矩、
位置等参数
仿真优化:根 据仿真结果对 步进电机控制 模型进行优化 提高控制精度
和稳定性
Simulink仿真的优 缺点和实际应用
Simulink仿真的优点
强大的建模能力:可以模拟 各种复杂的系统
易于使用:图形化界面易于 理解和操作
高效的仿真速度:可以快速 得到仿真结果
仿真结果分析和优化
仿真结果:电机转速、电流、扭矩 等参数
优化方法:调整控制参数、优化控 制算法
添加标题
添加标题
添加标题
添加标题
结果分析:分析仿真结果与实际工 况的差异
优化效果:提高电机控制精度、降 低能耗、提高效率
仿真案例分析
案例一:直流电机控制仿真
直流电机控制仿真概述 直流电机控制仿真模型搭建 直流电机控制仿真参数设置 直流电机控制仿真结果分析
搭建控制电路:包括电源、 控制器、电机等
设定仿真参数:如转速、 转矩、电流等
运行仿真:观察电机运行 情况分析结果
参数设置和仿真运行
电机模型选择: 根据实际需求选 择合适的电机模 型
控制策略设置: 设置PID控制器 参数如比例、积 分、微分系数等
仿真时间设置: 设置仿真运行的 时间范围
仿真运行:点击 运行按钮开始仿 真运行观察仿真 结果
闭环控制: 通过实时检 测电机的转 速、转矩和 位置并根据 检测结果调 整控制参数 实现对电机 的控制
自适应控制: 根据电机的 运行状态和 环境变化自 动调整控制 参数实现对 电机的控制
电机控制算法
基于matlab simulink的直流微电网的建模和仿真
直流微电网的建模和仿真目录1 引言 (3)1.1 目的 (3)1.2 文档格式 (3)1.3 术语 (3)1.4 参考文献 (3)2 系统概述 (4)3直流微网的能量管理方法 (4)4系统建模 (5)4.1PV电池 (5)4.2 PV电池DCDC变换器建模 (8)4.3蓄电池双向DCDC1变换器建模 (9)4.4逆变器建模 (11)4.5负载建模 (12)4.6蓄电池建模 (13)5仿真验证 (13)6结论 (18)1 引言1.1 目的该文档针对独立智能供电及生活保障系统的需求,给出了提供智能供电的直流微电网系统框架,并根据这一框架搭建理论模型和仿真模型。
验证这一直流微电网系统的功能可行性。
1.2 文档格式本文档按以下要求和约定进行书写:(1)页面的左边距为2.5cm,右边距为2.0cm,装订线靠左,行距为最小值20磅。
(2)标题最多分三级,分别为黑体小三、黑体四号、黑体小四,标题均加粗。
(3)正文字体为宋体小四号,无特殊情况下,字体颜色均采用黑色。
(4)出现序号的段落不采用自动编号功能而采用人工编号,各级别的序号依次为(1)、1)、a)等,特殊情况另作规定。
1.3 术语1.4 参考文献2 系统概述图1 直流微网的系统框图图1为直流微网的系统框图,仿真系统包括以下几个部分:1)PV组件的特性模型2)蓄电池的模型3)PV组件后的DCDC拓扑模型和控制模型4)蓄电池后双向DCDC1的拓扑模型和控制模型5)逆变器包括:单相逆变器和三相逆变器的拓扑模型和控制模型6)交流负载模型7)直流负载模型8)超级电容模型(暂缺)9)超级电容后双向DCDC2的拓扑模型和控制模型(暂缺)10)柴油机模型(暂缺)11)智能控制器2与光伏智能控制器的协调控制模型(暂缺)3直流微网的能量管理方法能量管理思想:管理微网中各分布电源的能量流动,使得微网工作最优状态。
以下为结合我们项目的一个能量管理原则,有了这个管理原则,就可以明确各个分布电源的控制方法。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
建立仿真模型时,将输入 定为常数1,常数 设为1, 设为1时,输出的图像如图3.2所示(理论上应该是一阶系统的单位阶跃响应)。横轴为时间 ,纵轴为活塞位移 。
图3.2活塞位移 -特性曲线
,响应较慢。增大时间常数,将 设定为10,其余参数不变源自此时 。仿真系统输出图像如图3.3。
图3.3活塞位移 -特性曲线( )
比较两条曲线,可以发现,时间常数越小,响应越快。活塞位移 大概经过5 得到稳态值,且稳态值与输入位移 一致。
其中, 为常数。这使得补给的气流进入活塞的左侧,则
但是,由于
其中, 为气缸的横断面面积,那么有
则有
其中 。上式表明,活塞位移 与挡板位移的时间积分成正比,且输入 与输出 之间的关系式为
也可以写成
其中
得出方框图如图2.1所示
图2.1待仿真气动控制系统方框图
3.气动控制系统的仿真模型
根据方框图可知,该系统为一阶系统,在simulink中建立系统的仿真模型,如图3.1所示。
1.待仿真气动控制系统介绍
如图所示,该气动控制系统用于由低压水平输入位移 提供一个高压水平输出位移 。本文将仿真输出位移-时间( )曲线,由曲线分析该系统的控制情况。
图1.1待仿真气动控制系统
2.气动控制系统的数学模型
如上页图中所示,如果输入是向左的位移 ,输出是向右的位移 ,则沿着连杆在它们中部的误差连接杆以图示方向移动一个距离 。喷口处挡板的移动为 ,其中 是常数,它可以通过改变增益而变化。这可通过相对于喷口移动挡板的上端来实现。如果可以忽略负载中的惯性和摩擦,气缸每侧的压力将保持恒定。如果假设流经喷口的空气量 随着挡板的位移而线性变化,并且当挡板位于喷口的中心时等于 ,那么当挡板向左移动时,由左喷口减少的气流为