6 从传递函数求离散状态方程
现代控制理论谢克明版习题解答
s2
5s 6 2s s2 5s 6
5
1
2s 5 s2 5s
6
x
0 6
1 0 5x 1u
y [5 2] u
结构图如图题 3-1-5 图 2(a)所示
7
现代控制理论习题详解
2
u
x2 x3 x2 x1
x1
5
5
6
或有
题 3-1-5 图 2(a)
s 2 3s 1
11
G(s) s 2 5s 6 1 s 2 s 3
1 1 2 P11
1
当 1 3 时,由 (1I A)P1 0 得: 1
3
2P2
1
0
,取
P1
1
1 1 0 P31
1
1 1 2 P12 1
1
当 2 3 时,由 (2I A)P2 P1 得: 1
3
2
P22
1 ,取
P2
0
1 1 0 P32 1
0
3 1 2 P13
0
特征值为:
1 1, 2 2, 3 3 。
P11 P12 P13
设变换阵:P= P21
P22
P23
P31 P32 P33
由 (i I A)Pi 0 得
1 1 0 P11
P11 1
当 1 1时, 3 1 2P21 0 取 P1 P21 1
12 7 5 P31
P31 1
2 1 0 P12
(4) y(4) 3y 2y 3u u
【解】:
5
现代控制理论习题详解
在零初始条件下,方程两边拉氏变换,得到传递函数,再根据传递函数求状态空间
表达式。
离散系统的状态空间表达式
(1)连续系统:用微分方程来表示,采用拉 普拉斯变换传递函数进行分析。
离散系统:用差分方程来描述,用Z变 换脉冲传递函数进行分析。
因此,离散系统的状态空间表达式可通过差 分方程或脉冲传递函数。
(2)离散系统的信号采用数字形式,输入和 输出都是脉冲序列或数字序列。计算机控制 系统属离散系统。
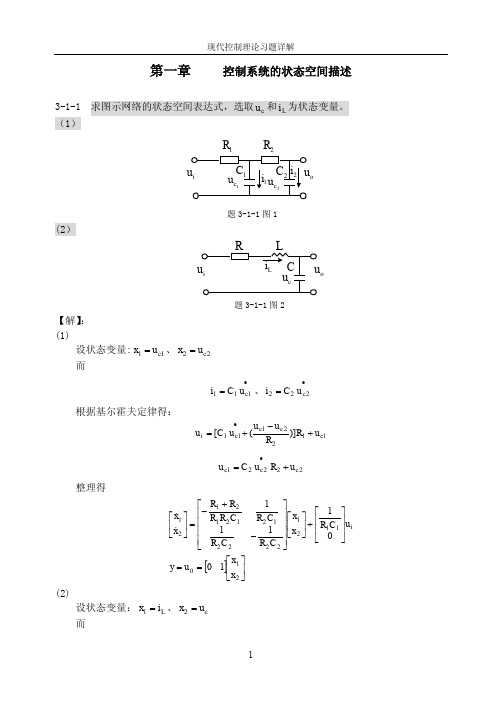
试写出其状态方程和输出方程 。
解:
x1 (k 1) 0
1
0 x1(k) 0
x2
(k
1)
0
0
1
x
2
(k
)
0
u(k)
x3 (k 1) 6 5 2x3 (k) 1
x1(k)
y(k) x(k) 1
0
0x2 (k)
x3 (k )
例1.10 已知 y(k+3)+2y(k+2)+5y(k+1) +6y(k)=3u(k+2)+2u(k+1)+6u(k)
脉冲传递函数:
G(z)
Y (z) u(z)
bmzm bm1zm1 b1z b0 zn an1zn1 a1z a0
二 、状态方程的建立
1、由差分方程
设T=1 输入仅有(kT)项,b0=1 整个方程可以写为: y(k+n)+an-1y(k+n-1)+……+a0y(k)=u(k) 设x1(k)=y(k) x2(k)=y(k+1)=x1(k+1) x3(k)=y(k+2)=x2(k+1) ……
xn(k)=y(k+n-1)=xn-1(k+1) xn(k+1)=y(k+n)=-a0 x1(k)-a1 x2(k)-
由传递函数求状态空间表达式根据前面介绍的微分方程与状态空间

b0sm b1sm1 L bm1s bm sn a1sn1 L an1s an
c1 c2 L cn
s 1 s 2
s n
(n m)
其中:
ci
lim G(s)(s
si
i )
X
1
(s
)
s
1
1
U (s)
X
2
(
s)
s
1
2
U (s)
X
n
(s)
s
1
n
U (s)
分解式第二部分表示状态变量与输出的关系, 输出y等于各状态变量与输入的线性组合,即式中 的C和D阵。
若传递函数等效为:
G(s)
b0
b1s n1 b2 s n1 s n a1s n1
bn1s an1s
bn an
式中
bi (bi aib0 ), (i 1,2, , n)
:
此时,式中的C阵和D阵可直接写成
sX 1(s) 1 X1 (s) U (s)
sX2
(s)
2
X
2 (s) U (s)
sX n (s) n X n (s) U (s)
x1 1x1 u
x2
2 x2
u
xn n xn u
Y (s) G(s)U (s) c1 U (s) c2 U (s) L cn U (s)
sn
a1s n1
b
an1s an
系统的微分方程为:
y (n) a1 y (n1) an1 y an y bu
则根据上节公式,可直接写出状态空间表达 式。即:
0 1 0
0
A
0
,
B , C 1
计算机控制系统复习资料(精简版 列出重点知识点)
第一章概论,讲述计算机控制系统的发展过程;计算机控制系统在日常生活和科学研究中的意义;计算机控制系统的组成及工作原理;计算机控制的特点、优点和问题;与模拟控制系统的不同之处;计算机控制系统的设计与实现问题以及计算机控制系统的性能指标。
1.计算机控制系统与连续模拟系统类似,主要的差别是用计算机系统取代了模拟控制器。
2.计算机系统主要包括:.A/D转换器,将连续模拟信号转换为断续的数字二进制信号,送入计算机;.D/A转换器,将计算机产生的数字指令信号转换为连续模拟信号(直流电压)并送给直流电机的放大部件;.数字计算机(包括硬件及相应软件),实现信号的转换处理以及工作状态的逻辑管理,按给定的算法程序产生相应的控制指令。
3.计算机控制系统的控制过程可以归结为:.实时数据采集,即A/D变换器对反馈信号及指令信号的瞬时值进行检测和输入;.实时决策,即计算机按给定算法,依采集的信息进行控制行为的决策,生成控制指令;.实时控制,即D/A变换器根据决策结果,适时地向被控对象输出控制信号。
4.计算机控制系统就是利用计算机来实现生产过程自动控制的系统。
5.自动控制,是在没有人直接参与的情况下,通过控制器使生产过程自动地按照预定的规律运行。
6.计算机控制系统的特性系统规模有大有小系统类型多种多样系统造价有高有低计算机控制系统不断推陈出新7.按功能分类1)数据处理系统2)直接数字控制(DDC)3)监督控制(SCC)4)分散型控制5)现场总线控制系统按控制规律分类1)程序和顺序控制2)比例积分微分控制(PID)3)有限拍控制4)复杂控制5)智能控制按控制方式分类1)开环控制2)闭环控制9.计算机控制系统的结构和组成控制算法软件网络硬件11.硬件平台运算处理与存储部分:CPU,存储器(RAM,ROM,EPROM,FLASH-ROM,EEPROM以及磁盘等),时钟,中断,译码,总线驱动等。
输入输出接口部分:各种信号(模拟量,开关量,脉冲量等)的锁存、转换、滤波,调理和接线,以及串行通讯等。
《现代控制理论》第三版_.习题答案
1 0 0 3 1 0 5 2 1 52 7 1 5 2 70 125 3 5 7 5 0 0 1 1 B 2 ; 2 5 5
1 0 a1 0 0 1 0 1 0 0 1 a2 3 7 5
0 B 0 1
C (b0 a0bn ) (bn1 an1bn ) 2 1 0
3 1 a 或者 2 2 1 a1 0 a0
e At I At 1 22 1 33 A t A t 2! 3! t2 t4 t6 t3 t5 1 4 16 64 , 4 16 t 2! 4! 6! 3! 5! 3 5 2 4 6 t t t t t t 4 16 64 , 1 4 16 64 3! 5! 2! 4! 6!
0 0 1 B M 1 0 0 0 0 1 M2
1 0 B 1 M1 B1 M2
1 B1 M1 B1 B2 M2
0
0 0 1 0 C 0 0 0 1
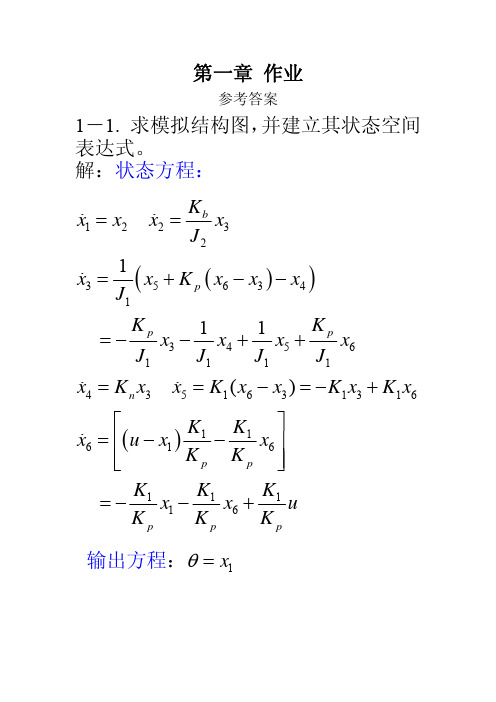
1-5. 根据微分方程, 写状态方程, 画模 拟结构图。
1 a2 a2 2 a1 3 2 a a a 1 2 2 a0
1 a2 a1
1 a2
12 b1 b0
b3 b 2 b1 1 b0
凯莱哈密顿法: 1,2 2 j
0 (t ) 1 1 e1t 1 2(e 2 jt e 2 jt ) (t ) 1 2t 4 2 jt 2 jt e j ( e e ) 2 1
已知传递函数求状态空间表达式
已知传递函数求状态空间表达式在控制系统理论中,常常需要将已知的传递函数转换为状态空间表达式。
这是因为状态空间形式更加直观,便于进行控制器设计和系统分析。
首先,我们需要将传递函数化简为标准形式:$$G(s) = frac{b_0 s^n + b_1 s^{n-1} + cdots + b_{n-1} s + b_n}{s^n + a_1 s^{n-1} + cdots + a_{n-1} s + a_n}$$其中 $n$ 为传递函数的阶数,$b_i$ 和 $a_i$ 是系数。
接下来,我们可以通过状态空间的基本方程来表示传递函数: $$begin{aligned}dot{x} &= Ax + Buy &= Cx + Duend{aligned}$$其中,$x$ 是 $n$ 维状态向量,$u$ 是 $m$ 维输入向量,$y$ 是$p$ 维输出向量。
$A$、$B$、$C$、$D$ 是系数矩阵,它们的维度分别为 $n times n$、$n times m$、$p times n$ 和 $p times m$。
我们可以通过下列步骤获得$A$、$B$、$C$ 和 $D$:1. 首先,将传递函数分解为零极点形式:$$G(s) =kfrac{(s-z_1)(s-z_2)cdots(s-z_n)}{(s-p_1)(s-p_2)cdots(s-p_n )}$$其中,$k$ 是比例系数,$z_i$ 和 $p_i$ 是零点和极点。
2. 利用零极点分解结果,构造传递函数的控制分式表达式:$$G(s) = kfrac{(s-z_1)}{(s-p_1)} cdot frac{(s-z_2)}{(s-p_2)} cdots frac{(s-z_n)}{(s-p_n)}$$3. 对每个控制分式,构造对应的状态空间模型:$$begin{aligned}dot{x_i} &= p_i x_i + uy_i &= z_i x_iend{aligned}$$其中,$i$ 取值为 $1$ 到 $n$。
python 将传递函数转换为离散状态方程
python 将传递函数转换为离散状态方程如何将传递函数转换为离散状态方程引言:传递函数是描述连续系统的一种数学表示方法,它能够清晰地表示系统输入和输出之间的关系。
然而,在某些情况下,我们可能需要将传递函数转换为离散状态方程,以便对离散系统进行分析和控制。
在本文中,我们将介绍如何将传递函数转换为离散状态方程,并详细讨论每个步骤。
第一步:确定离散时间点在将传递函数转换为离散状态方程之前,我们需要确定离散时间点。
离散时间点是指我们对系统进行观测和采样的时间点。
通常情况下,我们选择等间隔的时间点进行采样,以简化计算和分析。
根据系统的动态响应速度和采样需求,我们可以选择适当的采样频率。
第二步:转换传递函数为差分方程传递函数将系统的输入和输出之间的关系表示为一个比例关系。
换句话说,传递函数描述了系统对输入信号的响应。
我们可以通过将传递函数转换为差分方程来描述系统的离散状态方程。
差分方程是离散系统中状态和输入与输出之间的关系的数学描述。
它类似于传递函数中的比例关系,但是使用差分方程我们可以更直接地描述系统在每个离散时间点的状态。
通过使用差分方程,我们可以更好地理解离散系统的动态行为。
为了将传递函数转换为差分方程,我们需要使用z变换的方法。
z变换是用于离散系统分析的一种数学工具,它可以将离散时间域的信号转换为z域的复数函数。
通过对传递函数进行z变换,我们可以得到离散系统的差分方程。
第三步:离散化传递函数的参数在使用z变换将传递函数转换为差分方程之后,我们需要离散化传递函数的参数。
传递函数中的参数通常是比例、积分和微分项,它们代表了系统对不同输入的响应。
为了在离散系统中使用这些参数,我们需要根据所选的采样频率对它们进行离散化。
离散化的方法有多种,常用的方法包括零阶保持、一阶保持和Tustin方法。
这些方法可以将传递函数的参数转换为离散系统中的等效参数,以便我们可以在离散系统中进行分析和控制。
第四步:确定差分方程的初始状态在离散系统中,初始状态非常重要,它决定了系统在初始时刻的行为。
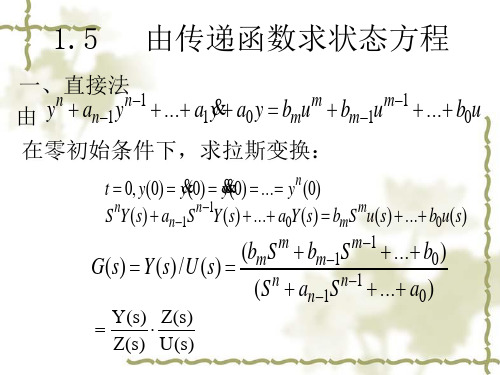
由传递函数求状态方程
& 0 x 1 1 x 1 1 0 x = 0 2 0 x + 1 u & 2 2 x 3 0 0 3 x 3 1 &
x1 y = [3 6 3] x 2 x 3
&1 λ x & x2 = M xn &
1
λ2
…… λn
x 1 x2 M xn
+
1 1 M 1
u
输出方程
n
Y ( s ) = ∑ ci xi ( s )
i =1
n
y(t) = ∑ci xi (t) = [c1c 2 L c n ]
i=1
x1 x2 M xn
ci可通过拉氏变换求留数
ci = lim G ( s)( s + λi )
ci Y(s) = ∑ u (s) i =1 s + λ i
n
s → λi
令
1 xi (s) = u(s) s + λi sxi (s) + λi xi (s) = u(s)
& x i = λ i x i + u 反变换: & x 1 = λ 1 x 1 + u & x 2 = λ 2 x 2 + u ... & x n = λ n x n + u
4S 3 + 9S 2 + 14 S + 23 G (s ) = 2S 3 + 4S 2 + 6S + 10
将分母最高次幂变为1 将分母最高次幂变为1
1 2 3 S +S+ 2 2 = Y(s) G (s) = 2 + 3 2 S + 2S + 3S + 5 u (s) 1 2 3 S +S+ 2 u (s) Y(s) = 2u (s) + 3 2 2 S + 2S + 3S + 5