《自动控制原理》3-6线性系统的稳态误差分析
自动控制原理(3-4)
式中Φn(s)——系统的扰动误差传递函数。
Φn
(s)
=
1+
Gc
Go (s) (s)Go (s)H
(s)
=
Go (s) 1+ G(s)
五、给定稳态误差终值的计算
Er
(s)
1
1 G(
s)
R(s)
esr
lim e(t)
t
lim
s0
sEr
(s)
lim s s0 1 G(s)
R(s)
esr为给定稳态误差的终值;G(s)为开环传递函数。
Er
(
s)
1
1 G(s)
R(s)
e
(s)R(s)
假定输入信号r(t)是任意分段连续函数,则可以利用
卷积公式计算给定误差:
式中
t
er (t) 0e (t) r(t ) d
er
(t)
1
2
j
c j
E c j r
(
s)
e
st
ds
e
(t)
1
2
j
c j
3.对于给定输入为抛物线函数时
r(t) Rt 2 2
R R(s) s3
则
esr
lim
s0
1
s G(s)
R(s)
lim
s0
s2
R s2G(s)
R Ka
式中
Ka
lim s2 G(s) s0
Ka为加速度误差系数,或称抛物线误差常数。
自动控制原理 线性系统的误差分析
e ss =
α 1 + k + ∞ + ∞ = ∞ , β , = 0 + + ∞ = ∞ k γ γ 0+0+ = , k k
本章作业
P134 • 3-3(3) • 3-4(2) • 3-6 • 3-7 • 3-11 • 3-12(2) • 3-13 • 3-14 • 3-15 • 3-16 • 3-18
系统输入r(t)=(α+βt+γt2/2)1(t),求0 型、Ⅰ型、Ⅱ型 例3.9 系统输入 α β γ , 系统的稳态误差。 系统的稳态误差。 解:利用叠加原理,可得系统的稳态误差为: 利用叠加原理,可得系统的稳态误差为:
α β γ + + 1+ kp kv ka 0 型系统 Ι 型系统 Ι I 型系统
N(s)
例3.8 G 1 (s) =
250 2 , G 2 (s ) = s + 50 s(s + 1)
R(s) (-) -
C(s) G1(s) G2(s)
时系统稳态误差。 求r(t)=1(t)+2t, n(t)=-1(t)时系统稳态误差。 时系统稳态误差 解:r(t)作用时:Kp=∞, Kv=K=10, essr=0+2/10=0.2 。 作用时: 作用时 n(t)作用时: 作用时: 作用时
2( s + 50) = lim sE ( s ) = lim = 0.2 s →0 s →0 s( s + 50)( s + 1) + 500
• 对扰动作用来讲,减小或消除误差的措施: 对扰动作用来讲,减小或消除误差的措施:增大扰动作用点之 前的前向通路增益、增大扰动作用点之前的前向通路积分环节数。 前的前向通路增益、增大扰动作用点之前的前向通路积分环节数。 • 终值定理法不能表示稳态误差随时间变化的规律。 终值定理法不能表示稳态误差随时间变化的规律。
自动控制原理(北航)电子教案扰动下对稳态误差及减小稳态误差的措施(第10讲)
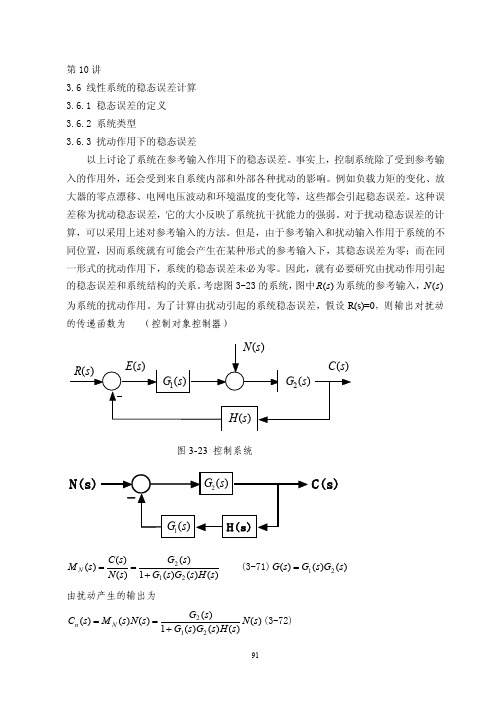
第10讲3.6 线性系统的稳态误差计算3.6.1 稳态误差的定义3.6.2 系统类型3.6.3 扰动作用下的稳态误差以上讨论了系统在参考输入作用下的稳态误差。
事实上,控制系统除了受到参考输入的作用外,还会受到来自系统内部和外部各种扰动的影响。
例如负载力矩的变化、放大器的零点漂移、电网电压波动和环境温度的变化等,这些都会引起稳态误差。
这种误差称为扰动稳态误差,它的大小反映了系统抗干扰能力的强弱。
对于扰动稳态误差的计算,可以采用上述对参考输入的方法。
但是,由于参考输入和扰动输入作用于系统的不同位置,因而系统就有可能会产生在某种形式的参考输入下,其稳态误差为零;而在同一形式的扰动作用下,系统的稳态误差未必为零。
因此,就有必要研究由扰动作用引起的稳态误差和系统结构的关系。
考虑图3-23的系统,图中)(s R 为系统的参考输入,)(s N 为系统的扰动作用。
为了计算由扰动引起的系统稳态误差,假设R(s)=0,则输出对扰动的传递函数为 (控制对象控制器)图3-23 控制系统N(s)C(s))()()(1)()()()(212s H s G s G s G s N s C s M N +== (3-71))()()(21s G s G s G = 由扰动产生的输出为)()()()(1)()()()(212s N s H s G s G s G s N s M s C N n +==(3-72)系统的理想输出为零,故该非单位反馈系统响应扰动的输出端误差信号为)()()()(1)()(0)(212s N s H s G s G s G s C s E n n +-=-=(3-73) 根据终值定理和式(3-73)求得在扰动作用下的稳态误差为)()()()(1)()(lim 2120s N s H s G s G s sG s sE e n s ssn +-==→ (3-74) 若令图3-23中的21)()(,)()(222111ννs s W K s G s s W K s G == (3-75)为讨论方便起见假设1)(=s H 则系统的开环传递函数为νs s W K s W K s G s G s G )()()()()(221121==(3-76)1)0()0(,2121==+=W W ννν。
3-6线性系统的稳态误差计算

m 1
m2
2
+ 2ζ kτk s +1) + 2ζlTs +1) l
∏(T s +1)∏(Ts
=
2
K ⋅ G0 (s) sν
sR(s) 1 essr = lim = = s→0 1+ G (s) 1+ limGk (s) k
s→0
1 1 = K 1+ Kp 1+ lim ν ⋅ G0 (s) s→0 s
三、扰动作用下的稳态误差(3) 扰动作用下的稳态误差(3) [例]系统结构图如图所示。当 r(t) = n(t) = 1(t) 系统结构图如图所示。 时,求系统的稳态误差 ess;若要求稳态误差 为零,如何改变系统结构。 为零,如何改变系统结构。 解:该系统对给定输入而言属于Ⅰ型系统。 该系统对给定输入而言属于Ⅰ型系统。 所以当给定输入为单位阶跃函数时的稳态误差 essr = 0
3、单位抛物线输入时的稳态误差
R(s) =
1 s3
sR(s) 1 essr = lim = = 2 s→0 1+ G (s) lims ⋅ Gk (s) k
s→0
1 1 = K Ka lim ν −2 ⋅ G0 (s) s→0 s
∞ 1 = K 0
Ka
根据
ν =0,1 ν =2 ν ≥3
m2
=
K ⋅ G0 (s) ν s
K-开环增益
系统型别(即积分环节的个数) ν − 系统型别(即积分环节的个数)
当ν =0,无积分环节,称为0型系统 无积分环节,称为0
当 = ,有一个积分环节,称为Ⅰ型系统 ν 1 有一个积分环节,称为Ⅰ
自动控制原理 自动控制原理 第三章3:线性定常系统的稳定误差计算P

∞ v R00 ess = K 0
ν =0 ν =1 ν ≥2
13
e ss
∞ R v 00 = K 0
ν = 0 ν = 1 ν ≥ 2
0型系统稳态时不能跟踪斜坡输入 Ⅰ型系统能跟踪斜坡输入,但存在一个稳态位置误差 型系统能跟踪斜坡输入, Ⅱ 型及 Ⅱ 型以上系统 , 稳态时能准确跟踪斜坡输入 型及Ⅱ型以上系统, 信号,不存在位置误差. 信号,不存在位置误差.
( 3 66 )
K p : 静态位置误差系数
K G (s)H (s) = s
20102010-7-11
ν
∏1 i= ∏1 j=
n ν
m
(τ (T
i
s + 1) ,
j
n ≥ m
s + 1)
K
p
K ,ν = 0 = ∞ ,ν ≥ 1
10
第三章 线性系统的时域分析法
K
p
K ,ν = 0 = ∞ ,ν ≥ 1
2 s→ 0
K s v2
s→ 0
20102010-7-11
第三章 线性系统的时域分析法
17
误差系数 类型
静态位置误 差系数
Kp
静态速度误差 系数
Kv
静态加速度误 差系数
K
a
0型
K
∞ ∞
0
0
Ⅰ型
K
∞
0 K
Ⅱ型
20102010-7-11
第三章 线性系统的时域分析法
18
输入
类型
r(t ) = R0
R0 1+ K
e
ss
ν 与 K R (s)
系统型别 开环增益有关 输入信号
《自动控制原理》第三第讲
误差系数 Kp Kv Ka
单位阶跃 输入
r(t) = u(t)
单位速度 输入
r(t) = t
单位加速 度输入
r(t) = 1 t 2 2
0
K0 0
1 1+K
I
∞ K0
0
II
∞ ∞K
0
∞
∞
1
∞
K
1
0
K
1. 稳态误差与输入信号有关;与开环增益有关;与积分环节的个 数有关。
2. 减小或消除稳态误差的方法: a、增加开环放大系数K; b、提高系统的型号数;
R(s)
E(s) -
G1 ( s)
+ G2 (s) C(s)
H (s) (b)
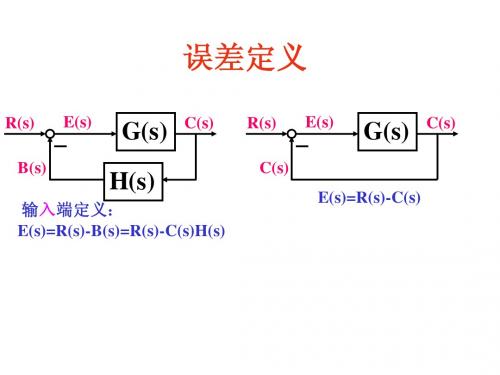
通常,给定输入作用产生的误差为系统的给定误差
(E=R-HC),扰动作用产生的误差为扰动误差。认为扰动输入时 系统的理想输出为零,故从输出端的误差信号为:
En
= C理想
− C实际
=
−C实际
=
−Cn
= − G2 1+ G1G2 H
=
lim sv+1R(s)
s→0
lim sv + K
s→0
由上式可见, ess 与系统的型号v﹑开环增益K及输入信号
的形式及大小有关,由于工程实际上的输入信号多为阶跃信号
﹑斜坡信号(即等速度信号) ﹑抛物线信号(即等加速度信号) 或者为这三种信号的组合, 所以下面只讨论这三种信号作用 下的稳态误差问题.
Ka
m
G(s)H (s)
=
K sv
∏ (τ is +1)
i =1
n−v
∏ (Tjs +1)
《自动控制原理》第三章 35 稳态误差计算

两种定义的联系: E ' ( s ) E ( s ) H (s)
H ( s ) 1时, E ( s ) E ' ( s )
能源与动力学院 第三章 线性系统的时域分析法
3
1. 误差与稳态误差的定义…
e(t ) L1[ E (s)] L1[e (s) R (s)] L1[ R (s) ] 1 G(s)H (s)
3-6 线性系统的稳态误差计算 (Steady-state error)
稳定性 系统性能 动态性能
稳态性能 稳态误差
稳态性能
原理性误差 结构性误差 (附加稳态误差)
系统结构 输入类型、形式 摩擦,间隙 死区等非线性
能源与动力学院
第三章 线性系统的时域分析法
1
3-6 线性系统稳态误差计算
本节内容:
N(s)
C(s)
G2 (s)
H (s)
输出端误差定义
E'n
(s)
Cn(s)
G2(s)
1G1(s)G2(s)H(s)
N(s)
输入端误差定义
En(s)
Cn(s)H(s)
G2(s)H(S) 1G1(s)G2(s)H(s)
ets (t ) ess (t ) 稳态误差
ess ( )
Lim
s0
sE (s)
Lim
s0
1
sR (s) G(s)H
(s)
ess():终值误差 条件s: E(s)在右半平面及析 虚( 轴原 上点 解除外)
能源与动力学院 第三章 线性系统的时域分析法
4
1. 误差与稳态误差的定义…
例1
R(s) E(S)
误差与稳态误差的定义 系统的类型 输入作用下稳态误差计算 扰动作用下稳态误差 减小或消除稳态误差的措施
自动控制原理第三章

3-2 一阶系统的时域分析
用一阶微分方程描述的控制系统
3-2-1 一阶系统数学描述 RC电路 其微分方程为: 电路, 例如 RC电路,其微分方程为:
R + r(t) _ I
1 Cs
+ C c(t) _ C(s)
ɺ T c+c = r
其中:c(t) 为电路输出电压, 其中: 为电路输出电压, R(s) UR r(t) 为电路输入电压, 为电路输入电压, T=RC为时间常数 为时间常数 由原理图得系统结构图。 由原理图得系统结构图。 R(s) 当初始条件为零时,其传递函数为: 当初始条件为零时,其传递函数为 C ( s) 1 = Φ ( s) = 一阶惯性环节 R(s) Ts + 1
t − 1 2 c (t ) = t − Tt + T 2 1 − e T 2
误差: 误差:
(t ≥ 0)
t − e (t ) = r (t ) − c (t ) = Tt − T 1 − e T 2
(t ≥ 0)
跟踪误差随时间推移而增大,直至无限大。 跟踪误差随时间推移而增大,直至无限大。 因此,一阶系统不能跟踪加速度输入。 因此,一阶系统不能跟踪加速度输入。
1 R
-
1 Ts
C(s)
6
3-2-2 一阶系统单位阶跃响应 系统输入: 系统输入:R(s ) = 1 系统输出: 系统输出:C ( s ) = Φ ( s ) R( s ) = 1 ⋅ 1 Ts + 1 s 1 T = − s Ts + 1 变换, Λ−1变换,得:h( t ) = 1 − e ,t ≥ 0 阶跃响应的特点: 阶跃响应的特点: 1 1) 在 t=0 时的斜率最大,为: 时的斜率最大,
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Step Response
1.8
N(s)
1.6
R(t) E(s)
G1 ( s)
+ G2(s)
C(s)
-
1.4
B(s)
H (s)
1.2
System: untitled2 Settling Time (sec): 6.81
理想值
System: untitled2
Final Value: 1
1
Amplitude
-
b(t)
N(s) C(t)
+ G2 (s)
e’(t) -
C(s)
式中: r(t)为给定输入;
B(s)
H (s)
b(t)为系统主反馈信号。
图 典型反馈系统结构图
H(s)是测量装置的传递函数(通常我们认为是理想的),故
此时误差就是给定输入与测量装置的输出量之差。
2020/4/11
误差的定义
“希望值”的基本概念:
给定输入量变化时,要求系统输出量以一定的精度跟 随输入量的变化,因而用给定稳态误差来衡量系统的稳态 性能。给定输入量不变时,需要分析输出量在扰动作用下 所受到的影响,因而用扰动稳态误差来衡量系统的稳态性 能。
2020/4/11
原理性误差、给定稳态误差、扰动稳态误差。
>> step(feedback(tf(1*[0.0,1],conv([1,1],[1.67,1])),1),0:.01:35)
一
从系统输出端定义的稳态误差,概念清晰,
பைடு நூலகம்
物理意义明确,也符合基本定义,但在实际
系统中 无Cr法(t) 测量,因而,一般只有数学意
义。而从系统输入端定义的稳态误差,它在
系统中是可以测量的,因而具有实用性。对
于单位反馈系统,要求输出量C(t)的变化规律
与给定输入r(t)的变化规律一致,所以给定输
入r(t)也就是输出量的希望值 ,即
典型系统结构如图所示,其误差定义有两种形式: E'(s) E(s) H (s)
(1)输出端定义法:e’ (t)C r(t)C (t)
式中:Cr (为t) 系统输出量的希望值;
C(t)为输出量的实际值。
R(t)
r(t)
(2)输入端定义法:e(t)r(t)b(t)
Cr (t)
1/H(s)
e(t)
E(s) G1(s)
从图形中体会误差和稳态误差
Time (sec)
阶跃响应:稳态误差为零
20
>>t=0:.01:20; 18 >>u=t;
斜坡响应:稳态误差为常数
Linear Simulation Results
16 >>lsim(feedback(tf(5*[0,1],conv([1,0],[1.67,1])),1),u,t)
第三章 线性系统的时域分析法
3-6 线性系统的稳态误差分析
项目
内容
教 学 目 的 理解稳态及稳态误差的概念,掌握其计算方法和
计算结果,进而熟悉减小或消除稳态误差的措施。
教 学 重 点 稳态误差系数定义和典型输入信号作用下的稳态
误差,即表3-5 ;减小或消除稳态误差的措施。
教 学 难 点 广义(动态)误差的概念和广义(动态)误差系
数的计算方法,各种补偿措施。
讲授技巧及注 意事项
表达式推导、图形显示和表格总结相辅相成。
2020/4/11
稳定性、过渡过
程性能(动态性能)和 稳态性能是我们分析
系统、评价系统、改
善系统时所用的三类 重要衡量标准。
2020/4/11
3-6 控制系统的稳态误差
系统响应的稳态分量(例如t>ts的输出分量)反映了系 统跟踪给定控制信号或希望输出信号的准确度或抑制扰动 信号的恢复能力。通常用稳态误差来衡量。它与系统本身 的结构、参数及外作用的形式有关,也与元件的不灵敏、 零点漂移、老化及各种传动机械的间隙、摩擦等因素有关。 本书只讨论由于系统结构、参数及外作用等因素所引起的 稳态误差,即原理性误差。 ➢ 给定稳态误差(由给定输入引起的稳态误差) ➢ 扰动稳态误差(由扰动输入引起的稳态误差)
误差
14
输入(理想值)
12
Amplitude
10
K=5
8 6 4 2
K=0.3
K=1
G KTds1 s1.67s1
Td 0
阶跃响应
0
0
2
4
6
2020/4/11
从图形中体会误差和稳态误差
8
10
12
14
16
18
20
Time (sec)
一、稳态误差的定义和基本概念
系统的误差 e(t)的基本定义为输出量的希望值与实际值之差。
0.8 System: untitled1
Settling Time (sec): 2.86 0.6
System: untitled1 Final Value: 0.909
System: untitled4 Final Value: 0.5
0.4
System: untitled4
Settling Time (sec): 2.49
0.2
>> step(feedback(tf(10*[0.0,1],conv([1,0],[1.67,1])),1),0:.01:35)
>> step(feedback(tf(10*[0.0,1],conv([1,1],[1.67,1])),1),0:.01:35)
0
0
5
10
15
20
25
30
35
2020/4/11
希望情况下偏差信号E(S)=0,R (s)C r(s)H (s) 则系统在输入信号作用下的希望输出为:
Cr
(s)
1 H(s)
R(s)
希望的状态
E(s) 0
对于扰动信号N(s)而言,希望的情况就是扰动 信号引起的输出为0(R=0,E=0),即系统的 希望输出Cn(t)一点都不受扰动的影响。
总2之020:/4/11C h o p eC r(s)C n(s)C r(s)H 1 (s)R (s)
。
此时Cr,(t) 上述两种Cr定(t) 义r(统t) 一为
e(t)= r(t) - c(t)
2020/4/11
一
说明
对于非单位反馈系统,若设定义1的误差为 E’(s), 定义2的误差为E(s),则E(s)与E’(s)的关系如下:
E' (s) E(s) H (s)
可见,两种定义对非单位反馈系统是存在差异的, 但两种定义下的误差之间具有确定的关系,即误差 E’(s)可以直接或间接地由 E(s)来确定。从本质上 看,它们都能反映控制系统的控制精度。在本书以 后的讨论中,将采用第二种误差定义。 E(t)通常也 称为系统的误差响应,它反映了系统在输入信号和 扰动信号作用下整个工作过程中的精度。误差响应 中也包含有瞬态分量和稳态分量两个部分,如果所 研究的系统是稳定的,那么当时间t趋于无穷大时, 瞬态分量趋近于零,剩下的只是稳态分量。