自动飞行控制系统 第十三章 自动飞行系统的余度技术
飞行自动控制系统统

飞行自动控制系统统一、电传操纵系统(FIY-BY-Wire)及其余度技术装有控制增稳系统的高性能飞机,适应了现代飞行的需要提高了飞机性能和操纵品质。
但是驾驶员还必须通过机械操纵系统才能操纵飞机。
而机械操纵系统的传输线在分布上较集中,所以在战斗中飞机一旦被火力击中后,很可能使整个操纵系统失灵,造成机毁人亡的事故。
所以为了现代高性能军用机的战斗生存性,在控制增稳的基础上又出现了一种电传操纵系统。
这种系统从驾驶杆到助力器之间的联系全部由电气方式联系起来。
从而克服了机械操纵系统所固有的摩擦、间隙、弹性、时间滞后等缺陷。
同时该系统布局灵活,可分散安装,这样就可大大提高战斗机的生存能力。
因此近年来在美国的F-16、F-18等飞机上己广泛获得应用。
简单电传操纵系统的方块图如图8.25所示。
由图可知,简单的电传操纵系统类似于控制增稳系统它也有杆力或杆位移传感器输出电指令信号,以及测飞机运动的角速度和法向加速度等返馈信号。
所不同的是它没有驾驶杆产生的机械信号输入到助力器去直接操纵舵面的偏转,所以它实际上是一个全权限的控制增稳系统。
操纵时,驾驶员操纵驾驶杆经杆力或杆位移传感器、指令模型形成所需的指令信号,并与来自测量飞机运动参数的速率陀螺仪和法向加速度计综合后的信号相比较,产生误差信号,经放大校正后送入舵回路,使得舵面偏转,操纵飞机作相应的运动。
当飞机运动参数达到驾驶员所希望的控制值时,比较后的误差信号也随趋于零,舵面则停止偏转,使飞机保持在驾驶员所期望的运动状态。
如果飞机受到扰动,破坏了该运动状态,那么速率陀螺和法向加速度计输出信号与所期望的电指令信号相比较产生误差信号,操纵舵面偏转,使飞机恢复到原来运动状态。
从上面的工作原理可看出,电传操纵是一种全电的闭环飞行自动控制系统。
而不能仅仅理解为把机械联接换成电的联接。
由于电传操纵系统己不再保留机械操纵系统作备份系统,所以一旦电传操纵系统失灵会造成机毁人亡。
为此对电传操纵系统提出很高的可靠性要求所允许的事故率为10-7数量级(即每一千万飞行小时只准发生一次故障)显然要实现这样高的可靠性,单套系统是不能保证的,必须采用余度技术来保证。
【系统】飞控考试题型
【关键字】系统一、飞行控制系统组成及主要系统的作用。
飞行控制系统组成:自动驾驶仪A/P、飞行指引仪FD、安定面配平(STAB/T)、偏航阻尼系统(Y/D)飞行指引仪的作用:1、在自动驾驶仪衔接前,指引仪将飞机实际飞行路线与目标路线比较,计算出进入目标路线所需要的操纵量,为驾驶员提供目视飞行指引指令2、在自动驾驶仪衔接后,监控自动驾驶仪的工作状态。
即(1)提供目视操作指令;(2)监控自动驾驶仪。
偏航阻尼系统作用:(1)阻尼飞机“荷兰滚”运动;(2)协调转弯。
安定面配平(STAB/T)的作用:(1)产生附加力矩,以保持纵向力矩的平衡。
卸掉由于升降舵偏转产生的铰链力矩(间接),使升降舵回到相对零位,驾驶杆力也为零。
(2)解决自动驾驶仪的衔接与断开过程中引起飞机的剧烈运动。
分为M/T、SPD/T、AP/T、人工电气配平、备用电气配平。
AP/T:驾驶仪接通后,保持姿态的稳定。
自动配平系统是在自动驾驶衔接后工作。
SPD/T:(适用于起飞、复飞阶段):提供纵向平衡力矩,保证速度的稳定。
在飞机起飞和复飞过程中减小因速度变化引起的不稳定,是根据计算空速的变化对安定面进行配平。
在起飞、复飞阶段,速度配平系统提供在低速大推力条件下的速度稳定。
即当空速增加时使飞机抬头配平,当空速减小时使飞机低头配平。
速度配平是在飞机起飞20秒后,并且人工配平和自动配平都没有衔接的情况下开始衔接。
一旦人工配平或自动配平衔接则速度配平就脱开。
M/T(范围一般在0.6-0.9,高速巡航阶段):当马赫数接近临界值时,飞机因焦点后移而引起下俯力矩,此时,自动控制升降舵(或安定面)的偏转来进行补偿,使飞机不再出现速度不稳定的现象,飞机的操纵也符合正常规律。
作用是提供纵向平衡力矩,保证速度的稳定性,防止“反操纵”。
马赫配平系统是为了防止飞机马赫数增加时产生的俯冲。
人工电气配平:由飞行员操纵配平电门输入配平指令给配平计算机。
备用电气配平:当人工电气配平失效时应急使用偏航阻尼系统:主要功用是由偏航阻尼器通过计算,输出方向舵偏转信号来控制方向舵的偏转来抑制荷兰滚,稳定飞机的航向,并对飞机的转弯起协调作用。
飞行控制计算机的余度分析与设计
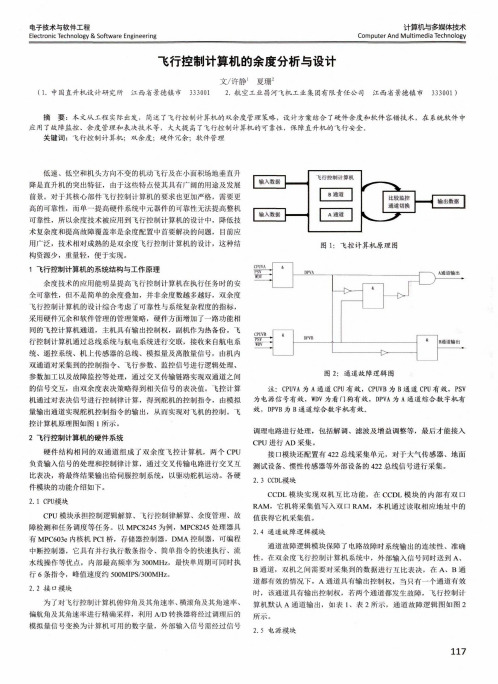
计算机与多媒体技术Computer And Multimedia Technology电子技术与软件工程Electronic Technology & Software Engineering 飞行控制计算机的余度分析与设计文/许静I 夏珊2(1.中国直升机设计研究所 江西省景德镇市333001 2.航空工业昌河飞机工业集团有限责任公司 江西省景德镇市333001 )摘 要:本文从工程实际出发,简述了飞行控制计算机的双余度管理策略,设计方案结合了硬件余度和软件容错技术,在系统软件中 应用了故障监控、余度管理和表决技术等,大大提高了飞行控制计算机的可靠性,保障直升机的飞行安全。
关键词:飞行控制计算机;双余度;硬件冗余;软件管理低速、低空和机头方向不变的机动飞行及在小面积场地垂直升降是直升机的突出特征,由于这些特点使其具有广阔的用途及发展前景。
对于其核心部件飞行控制计算机的要求也更加严格,需要更高的可靠性,而单一提高硬件系统中元器件的可靠性无法提高整机可靠性,所以余度技术被应用到飞行控制计算机的设计中,降低技术复杂度和提高故障覆盖率是余度配置中首要解决的问题,目前应用广泛,技术相对成熟的是双余度飞行控制计算机的设计,这种结构资源少,重量轻,便于实现。
1飞行控制计算机的系统结构与工作原理余度技术的应用能明显提高飞行控制计算机在执行任务时的安全可靠性,但不是简单的余度叠加,并非余度数越多越好,双余度飞行控制计算机的设计综合考虑了可靠性与系统复杂程度的指标,釆用硬件冗余和软件管理的管理策略,硬件方面增加了一路功能相 同的飞控计算机通道,主机具自输出控制权,副机作为热备份。
飞行控制计算机通过总线系统与航电系统进行交联,接收来自航电系 统、遥控系统、机上传感器的总线、模拟量及离散量信号,由机内双通道对采集到的控制指令、飞行参数、监控信号进行逻辑处理、参数加工以及故障监控等处理,通过交叉传输链路实现双通道之间的信号交互,由双余度表决策略得到相关信号的表决值。
四余度电传飞行控制系统研究

四余度电传飞行控制系统研究发布时间:2022-06-07T01:38:01.339Z 来源:《中国科技信息》2022年4期作者:贾涛[导读] 余度技术是提高部件和系统可靠性的主要方法贾涛中航西安飞机工业集团股份有限公司陕西省西安市 710087【内容摘要】余度技术是提高部件和系统可靠性的主要方法,在航空航天和军事工业方面有着广泛的应用,飞行控制系统多采用余度技术,本文以四余度电传控制系统为研究对象,对系统的余度配置、余度管理及检测方法BIT技术进行了简单介绍。
关键词:余度;飞行控制;BIT0 研究目的及背景飞行控制系统(Flight Control System,简称FCS)是飞行器的核心部件,其可靠性高低直接关系到飞行器的飞行安全。
飞行控制系统大致经历了四个阶段,最原始的机械控制系统,增稳和控制增稳系统,电传飞行控制系统和光传飞行控制系统,电传操纵系统的可靠性比起传统的机械式操纵系统要可靠很多,同时因为加入了反馈控制是飞行员的操纵压力大大减小。
电传飞行控制系统(Fly by Wire Flight ControlSystem,简称FBW FCS)是目前世界各国军用和民用飞机广泛采用的飞行控制系统形式。
电传飞行控制技术多采用余度技术(Redundant Technology,简称RT),通过余度配置和余度管理来提高系统可靠性。
余度技术在电传飞行控制系统中得到广泛的应用,余度技术首先运用于军用战斗机。
美国的F-16A/B采用四余度模拟式电传飞行控制系统;F-16C/D、F-18A 均采用四余度数字电传控制系统;法国的“幻影”2000分别采用三余度和四余度模拟与数字电传飞行控制系统;前苏联的苏-27采用四余度模拟电传飞行控制系统;A-129攻击直升机采用两余度综合电子飞行控制系统。
另外,世界上研制长航时无人机的美国、以色列、加拿大、法国、意大利和德国等,飞行控制系统均采用不同程度的余度控制系统。
飞行控制系统的余度设计也已应用到民用飞机上,如空客A320采用数字双-三非相似余度飞行控制系统。
新型操舵控制系统余度管理技术
新型操舵控制系统余度管理技术新型操舵控制系统余度管理技术随着科技的不断进步,现代化的操舵控制系统被广泛应用于航空、航海、轮船和汽车等领域。
为了进一步提高操舵控制系统的可靠性和安全性,余度管理技术不断得到应用。
本文将介绍新型操舵控制系统余度管理技术的原理、应用和未来发展。
什么是余度管理技术余度是指操纵系统在给定时间内所能实现的最大运动范围。
余度范围内的变形称为弹性形变,是操纵系统的可逆变形。
余度管理技术即是对操纵系统余度进行有效管理,以保证系统在正常使用中不会超出余度范围。
新型操舵控制系统余度管理技术原理新型操舵控制系统余度管理技术基于数学模型和算法原理,通过对余度进行实时监测和控制,以确保操纵系统稳定性和可靠性。
其主要原理包括以下几个方面:1.余度监测新型操舵控制系统配备高精度传感器,对操纵系统余度进行实时监测。
当余度超出预设范围时,系统将自动发出警报,提示操作者必须采取措施限制操纵系统移动范围。
2.余度控制操纵系统余度控制是指通过控制系统来限制余度的最大范围,以确保系统的稳定性和可靠性。
新型操舵控制系统采用精准的PID算法,通过在线调节控制器的参数来适应不同的运动条件和环境。
3.余度预测余度预测是指对操纵系统未来可能出现的余度进行预测和分析,以便系统能够在未来某个时刻自动限制操纵系统的运动范围。
新型操舵控制系统通过利用神经网络模型等技术,对余度进行预测和分析,以提高系统的智能化程度和精度。
新型操舵控制系统余度管理技术应用新型操舵控制系统余度管理技术应用广泛,涉及航空、航海、轮船和汽车等多个领域。
以下是其主要应用场景:1.航空领域航空领域是新型操舵控制系统余度管理技术的重要应用领域之一。
飞机的操纵系统在高飞行速度和复杂环境下易出现超过余度范围的情况。
新型操舵控制系统余度管理技术能够有效监测和控制飞机操纵系统的余度范围,以确保飞机在飞行过程中的稳定性和安全性。
2.航海领域在航海领域,操纵系统余度管理技术能够摆脱传统独立算法的弊端,有效提高导航系统的性能和精度。
先进飞行控制系统》第(1)
2021/4/22
19
7.1.3 电传操纵系统的特点与分类
(1)特点 1)FBW系统主要靠电路传递飞行员指令,因而在这种系统中
不再含有机械操纵系统。 a) 这有利于提高飞机战场的生存能力。由电路代替机械杆
系,可使飞机操纵系统被炮火击中的概率减小,提高战 场生存能力。
2021/4/22
20
b)此外,因无机械杆系,可以减轻重量,消除机械系统存 在的间隙摩擦等非线性与弹性变形的影响,有利微小信号 传递。
舵回路 A
故障逻辑
表决器/ 监控器B
舵回路 B
故障逻辑
表决器/ 监控器C
表决器/ 监控器D
舵回路 C
故障逻辑
舵回路 D
故障逻辑
助力器
9
▪ [四余度杆力传感器]―接收驾驶员指令输入信号
▪ [四余度传感器]―含速率陀螺与加速度计,用于提供增稳 信号;
▪ [四余度的综合补偿器]―是电子组件,也是模拟式飞控计 算机完成数据处理、增益调整、滤波、动态补偿、信号放 大等功能;
目前所用的数字式电传,实际上是混合式系统(半数字系统)
2021/4/22
26
7.1.4 电传操纵系统的功能与控制原理
▪ 电传操纵系统实际上是在控制增稳基础上,取消不可逆助力 机械操纵通道,只保留驾驶杆经杆力传感器输出电气指令信 号的通道构成的。无论模拟式或数字式系统的功能与控制原 理都是相同的。对每一种给定的飞机来说可能有不同的系统 结构和功能要求,也即有不同的控制规律,但是在基本方面 将是大同小异的。
2021/4/22
13
(4)解析余度技术
▪ 与硬件余度相对照,解析余度不是通过“相似”硬件的多重 设计,而是用数学(软件)方法来构成余度的。它通常采用 与测量变量有关的物理过程的解析模型来形成余度。现阶段 采用的多套硬件余度有一个本质的弱点,其基本可靠性平均 无故障间隔MTBF会成倍下降,给地面维护工作增加了负担 。解析余度技术可以实现在提高系统安全可靠性的同时,又 可以保证系统的MTBF不降低。
自动飞行控制系统介绍
2、人工操纵过程
陀螺地平 仪
眼睛
大脑
胳膊 手
驾驶杆
升降舵
驾驶员
飞机
3
航空自动化学院
第一节 飞行器的自动飞行
3、自动驾驶过程
自动驾驶仪
敏感元件
放大计算 装置
执行机构
升降舵
4
飞机
航空自动化学院
第一节 飞行器的自动飞行
4、飞行控制: 人工操纵 自动控制:自动控制是指在没有人直接参与的条件下由控 制系统自动控制飞行器(这里主要是指飞机和导弹)的飞 行。这种控制系统成为飞行自动控制系统。 自动控制的基本原理就是自动控制理论中最重要、最本质 的“反馈控制”原理。 5、自动飞行控制系统的作用 对飞行器进行稳定 引导/制导飞行器:把飞行器按照一定的方式引导或制导到 一定的位置 改善飞行器的静、动态性能
14
航空自动化学院
第二节 空气动力学的基本知识
也可以写成微分形式:
d
dV dA 0 V A
15
在飞行速度不大的情况下,绕飞行器流动的流场各 点流速差异不大,温度、压强变化很小,因而密度 变化也很小,可以认为空气是不可压缩的流体, =常数。于是连续方程可以简化为: VA 常数 此时表明,流管截面积大的地方流速小,流管截面 积小的地方流速大。
9
航空自动化学院
第一章 飞行原理
飞机控制系统的核心问题是研究由控制系统和飞行 器组成的闭合回路的静、动态性能,为此必须建立 控制系统和飞行器的数学模型,其形式可以是微分 方程、传递函数或状态空间表达式等。 飞行原理是研究飞行器运动规律的学科,属于应用 力学范畴。本章主要讨论在大气中飞行的有固定翼 飞机的运动特性,并简要介绍有关空气动力学的基 本知识。
各种飞机的操纵原理
北京摩诘创新科技 吕兆波
ppt课件
飞行操纵系统概述
ppt课件
飞行操纵系统定义
❖飞机飞行操纵系统是飞机上用来传递操纵指令,驱动舵面运动
的所有部件和装置的总合
❖驾驶员通过操纵飞机的各舵面和调整片实现飞机绕纵轴、横轴
和立轴旋转,以完成对飞机的飞行状态、气动外形的控制
ppt课件
固定翼飞机的操纵面
飞机高速飞行时由于气动载荷而引起的机翼扭 转弹性变形,使得偏转副翼时所引起的总滚转 力矩与预期方向相反的现象。
副翼操纵的失效和反逆是怎样产生
副翼操纵的失效和反逆是怎样产生
操纵力矩M1=反力矩M2, 再操纵副翼就不会产生 滚转力矩,这种现象叫 副翼失效。这个飞行速 度叫副翼反逆临界速度。
M1<M2时,副翼反效。
●横侧反操纵
小迎角时,压右盘,飞机右滚,形成右侧滑,出现横侧稳 定力矩,阻止右滚。接近临界迎角时,压右盘,下偏副翼的左 侧机翼阻力很大,上偏副翼的右侧机翼阻力较小,这一阻力差 将加大飞机的侧滑角,从而加大使飞机左滚的横侧稳定力矩。 当稳定力矩大于操纵力矩时,出现压右盘导致飞机左滚。
偏转副翼引起的有害偏航
ppt课件
Page4
➢ 大型客机常采用混合副翼: ❖内副翼:全速副翼 ❖外副翼:低速副翼
低速副翼 全速副翼 滚转扰流板 升降 可配平的水平安定面 方向舵
ppt课件
Page5
固定翼飞机的操纵面
左副翼
右副翼
ppt课件
Page6
固定翼飞机的操纵面
左副翼
右副翼
左升降舵
右升降舵
ppt课件
Page7
固定翼飞机的操纵面
① 直线飞行中改变迎角的基本原理
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
实现对所发现 差误和故障的 处理,目的是 故障隔离或故 障效应的软化
实施对系统的 重构
进行系统工作 状况(故障、 故障影响)的 申报与咨询等
12
13.2 余度管理技术
监控面设计原则
在不过分增加系统复杂性的前提下,通过监控面的 设置尽量提高系统的可靠性。因为从数学计算的角 度上讲,监控面的数目越多,在相同余度配置的条 件下。系统的可靠性越高。当然,监控面的过多设 置又带来不可避免的负面效应——系统复杂性的提 高和故障率的增加。因此,监控面的位置与数目的 选择是一个综合考虑各方面因素的折中设计。
自动飞行系统
课程回顾
第十一章 偏航阻尼器系统 第十二章 电传操纵系统
问题导入
保证系统有足够的可靠性,并且应 不低于机械操纵系统的水平。但是, 在当前的技术条件下,单通道的数 字飞行控制系统是无法实现所规定 的飞行安全可靠性指标的
3
解决措施
一种途径是进一步提高元部件的 可靠性,这是有限的; 另一种有效方法是采用余度技术, 即采用多重可靠性较低的、相同或 相似的元部件组成可靠性较高的系 统,通常称这样的系统为余度系统。
13.5 故障综合与故障申报
故障申报
是由系统的显示、告警装置实现的。 故障申报的原则、方式和信息量的多少受 系统上述部件能力的约束,而且故障综合 应同故障申报要求相兼容。
13.6 故障的恢复
故障恢复
故障恢复功能为一部分“原已发生,而 且也已被隔离并被申报”的故障,当其故 障状态确已消失、信息恢复正常后,再度 被使用提供了条件。
10
Hale Waihona Puke 13.1 余度配置相似余度:采 用完全相同的 硬件(或软件) 所组成的多重 余度系统。
弱点在于:无 法抗拒共性故 障的雪崩式损 害。
余
度 非相似余度:
形
可以大大减少 各余度通道之
间遭受共同故
式
障而同时丧失 功能的概率,
从而增加系统
的生存能力和
提高可靠性。
11
13.2 余度管理技术
1
2
3
4
实行对系统各 分系统、各部 件的工作状况 的检测与监控, 目的是发现差 误和故障
也称冷备份余度方案, 是指系统虽然具有N个余 度,但是在工作时间内, 在运行,其他余度通道 只有一个工作通道不运 行、不参与控制,而只 是处于备份状态。
15
13.2 余度管理技术
平均值表 决法
中值表决法
多数表决法
信号表决是指在正常工作和各种故障状态下, 从余度通道的信号中选择适宜的信号作为工作信 号参与控制。
4
本节课内容
第十三章 自动飞行系统的余度技术
13-1、余度配置 13-2、余度管理技术 13-3、故障监控和隔离 13-5、故障综合与故障申报 13-6、故障恢复
13.1 余度配置
自动飞行控制系统的余度配置可 以用其硬件的基本余度等级来表示, 是指和飞机飞行安全至关重要、并 决定系统可靠性的要害部件的余度 配置数目。
7
13.1 余度配置
飞行控制计算机、伺 服舵机和主要的传感 装置(驾驶员指令传 感器、飞机运动传感 器)
决定系统可靠性要害的部件
8
13.1 余度配置
9
13.1 余度配置
选择
飞行控制系统的硬件基本余度等级以四余度和 具有自监控能力的三余度方案最为常见,均可 以实现双故障工作。但是,依据目前实际技术 水平的情况分析,自监控能力尚待完善,自监 控的覆盖率也不理想,所以,四余度方案常常 是首选构型。
故障隔离方法
在地面维护性测试条 件下,可以通过BIT 将故障定位至LRU、 SRU级,进行人工的
更换,从而达到隔离 的目的
13.5 故障综合与故障申报
故障综合
是将整个飞行控制系统所发生的全部故 障(包括各功能单元的瞬态故障及永久故 障)逐一进行分类、登记,并根据预先制 定的综合准则.实施申报等级的划分与显 示方案的处理。
16
13.3 故障监控和隔离
故障监控是由监控器实现的 一种功能,它能检测并识别 有故障的部件及通道,发出 监控信号以便执行警告与切 换。自动飞行控制系统中的 故障有两类:飞行中故障和 潜在故障。
17
13.3 故障监控和隔离
比较监控
把各余度信号加 以相互比较的方 法,实现对故障 的检测和识别
自主式监控
13
13.2 余度管理技术
监控面设计具体安排
特殊信号 的监控
传感器输出信 号的自检测与 余度信号的比 较监控
开关量、离
散信号的比 较监控
伺服作动系
统自监控与 比较监控
计算机自 监控
输出指令 监控
14
13.2 余度管理技术
余度通道间的运行状态
热并行运行方式
全部余度均在执行同 一任务的热运行之中
主备方式
通过硬件、软件或 硬/软件综合等手 段,无需外部任何 支持条件而仅依靠 本通道自身的能力, 所提供的故障检测 与识别方式,
18
13.3 故障监控和隔离
利用表决器及监控 器的重构,完全舍 弃已发生故障的信 号,使其不再参加 信号链信息的表决 和传递
利用转换机构(开关、 离合器)、转换线路 (逻辑电路)切除已发 生故障功能对系统的影 响