现代控制理论 第5章线性时不变系统的多项式矩阵描述[精]
绪论

出生日期: 1831年06月13日 逝世日期: 1879年11月5日 职业: 物理学家
Harbin Engineering University
3 公因子和最大公因子
公因子的定义
• 相同列数的两个多项式矩阵间可以定义右公因子(是多项式 矩阵).假定N(s)和D(s)列数相同,若 N ( s) N ( s) R( s)
D(s) D (s) R(s) 则R(s)称为N(s)和D(s)的右公因子.
认识他们吗??
Edward John Routh :1831年1月20日出 生在加拿大的魁北克。
Routh 11岁那年回到英国,在de Morgan指导下学 习数学。在剑桥学习的毕业考试中,他获得第一名。并 得到了“Senior Wrangler”的荣誉称号。 毕业后Routh开始从事私人数学教师的工作。从 1855年到1888年Routh教了600多名学生,其中有27位获 得“SEnior Wrangler”称号。建立了无可匹敌的业绩。
Harbin Engineering University
哈罗德·史蒂芬·布莱克( Harold Stephen Black)
Harold Stephen Black (April 14, 1898 – December 11, 1983) was an American electrical engineer, who revolutionized the field of applied electronics by inventing the negative feedback amplifier in 1927. To some, his invention is considered the most important breakthrough of the twentieth century in the field of electronics, since it has a wide area of application. However, a negative feedback amplifier can be unstable such that it may oscillate. Once the stability problem is solved, the negative feedback amplifier is extremely useful in the field of electronics. Black published a famous paper, Stabilized feedback amplifiers, in 1934.
现代控制理论第版课后习题答案
现代控制理论第版课后习题答案Prepared on 22 November 2020《现代控制理论参考答案》第一章答案1-1 试求图1-27系统的模拟结构图,并建立其状态空间表达式。
解:系统的模拟结构图如下: 系统的状态方程如下: 令y s =)(θ,则1x y =所以,系统的状态空间表达式及输出方程表达式为1-2有电路如图1-28所示。
以电压)(t u 为输入量,求以电感中的电流和电容上的电压作为状态变量的状态方程,和以电阻2R 上的电压作为输出量的输出方程。
解:由图,令32211,,x u x i x i c ===,输出量22x R y =有电路原理可知:•••+==+=++3213222231111x C x x x x R x L ux x L x R 既得22213322222131111111111x R y x C x C x x L x L R x u L x L x L R x =+-=+-=+--=•••写成矢量矩阵形式为:1-4 两输入1u ,2u ,两输出1y ,2y 的系统,其模拟结构图如图1-30所示,试求其状态空间表达式和传递函数阵。
解:系统的状态空间表达式如下所示: 1-5系统的动态特性由下列微分方程描述列写其相应的状态空间表达式,并画出相应的模拟结构图。
解:令..3.21y x y x y x ===,,,则有相应的模拟结构图如下: 1-6 (2)已知系统传递函数2)3)(2()1(6)(+++=s s s s s W ,试求出系统的约旦标准型的实现,并画出相应的模拟结构图解:ss s s s s s s s W 31233310)3(4)3)(2()1(6)(22++++-++-=+++= 1-7 给定下列状态空间表达式[]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡----=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡321321321100210311032010x x x y u x x x x x x ‘(1) 画出其模拟结构图 (2) 求系统的传递函数 解:(2)⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+-+-=-=31103201)()(s s s A sI s W 1-8 求下列矩阵的特征矢量(3)⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=6712203010A 解:A 的特征方程 061166712230123=+++=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+---=-λλλλλλλA I 解之得:3,2,1321-=-=-=λλλ当11-=λ时,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---3121113121116712203010p p p p p p 解得: 113121p p p -== 令111=p 得 ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=1113121111p p p P(或令111-=p ,得⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=1113121111p p p P ) 当21-=λ时,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---32221232221226712203010p p p p p p 解得: 1232122221,2p p p p =-= 令212=p 得 ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=1423222122p p p P(或令112=p ,得⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=21213222122p p p P )当31-=λ时,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---33231333231336712203010p p p p p p 解得: 133313233,3p p p p =-= 令113=p 得 ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=3313323133p p p P1-9将下列状态空间表达式化成约旦标准型(并联分解)(2)⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡32121321321110021357213311201214x x x y y u x x x x x x解:A 的特征方程 0)3)(1(311212142=--=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡------=-λλλλλλA I 当31=λ时,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--3121113121113311201214p p p p p p 解之得 113121p p p == 令111=p 得 ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=1113121111p p p P当32=λ时,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--1113311201214312111312111p p p p p p 解之得 32222212,1p p p p =+= 令112=p 得 ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=0013222122p p p P当13=λ时,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--332313332313311201214p p p p p p 解之得3323132,0p p p == 令133=p 得 ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=1203323133p p p P约旦标准型1-10 已知两系统的传递函数分别为W 1(s)和W 2(s)试求两子系统串联联结和并联连接时,系统的传递函数阵,并讨论所得结果 解:(1)串联联结 (2)并联联结1-11 (第3版教材)已知如图1-22所示的系统,其中子系统1、2的传递函数阵分别为求系统的闭环传递函数解:1-11(第2版教材) 已知如图1-22所示的系统,其中子系统1、2的传递函数阵分别为求系统的闭环传递函数 解:1-12 已知差分方程为试将其用离散状态空间表达式表示,并使驱动函数u 的系数b(即控制列阵)为(1)⎥⎦⎤⎢⎣⎡=11b解法1: 解法2:求T,使得⎥⎦⎤⎢⎣⎡=-111B T 得⎥⎦⎤⎢⎣⎡=-10111T 所以 ⎥⎦⎤⎢⎣⎡-=1011T 所以,状态空间表达式为第二章习题答案2-4 用三种方法计算以下矩阵指数函数At e 。
《现代控制理论》课后习题全部答案(最完整打印版)
第一章习题答案1-1试求图1-27系统的模拟结构图,并建立其状态空间表达式。
解:系统的模拟结构图如下:系统的状态方程如下:阿令,则所以,系统的状态空间表达式及输出方程表达式为状态变量的状态方程,和以电阻上的电压作为输出量的输出方程。
解:由图,令,输出量有电路原理可知:既得写成矢量矩阵形式为:1-4两输入,,两输出,的系统,其模拟结构图如图1-30所示,试求其状态空间表达式和传递函数阵。
解:系统的状态空间表达式如下所示:1-5系统的动态特性由下列微分方程描述列写其相应的状态空间表达式,并画出相应的模拟结构图。
解:令,则有相应的模拟结构图如下:1-6(2)已知系统传递函数,试求出系统的约旦标准型的实现,并画出相应的模拟结构图解:1-7给定下列状态空间表达式(1)画出其模拟结构图(2)求系统的传递函数解:(2)1-8求下列矩阵的特征矢量(3)解:A的特征方程解之得:当时,解得:令得(或令,得)当时,解得:令得(或令,得)当时,解得:令得1-9将下列状态空间表达式化成约旦标准型(并联分解)(2)解:A的特征方程当时,解之得令得当时,解之得令得当时,解之得令得约旦标准型1-10已知两系统的传递函数分别为W1(s)和W2(s)试求两子系统串联联结和并联连接时,系统的传递函数阵,并讨论所得结果解:(1)串联联结(2)并联联结1-11(第3版教材)已知如图1-22所示的系统,其中子系统1、2的传递函数阵分别为求系统的闭环传递函数解:1-11(第2版教材)已知如图1-22所示的系统,其中子系统1、2的传递函数阵分别为求系统的闭环传递函数解:1-12已知差分方程为试将其用离散状态空间表达式表示,并使驱动函数u的系数b(即控制列阵)为(1)解法1:解法2:求T,使得得所以所以,状态空间表达式为第二章习题答案2-4用三种方法计算以下矩阵指数函数。
(2)A=解:第一种方法:令则,即。
求解得到,当时,特征矢量由,得即,可令当时,特征矢量由,得即,可令则,第二种方法,即拉氏反变换法:第三种方法,即凯莱—哈密顿定理由第一种方法可知,2-5下列矩阵是否满足状态转移矩阵的条件,如果满足,试求与之对应的A阵。
现代控制理论基础_周军_第五章状态反馈与状态观测器
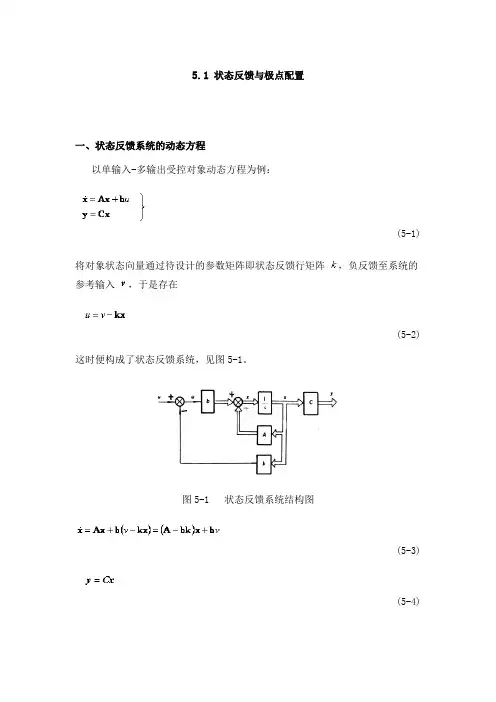
5.1状态反馈与极点配置一、状态反馈系统的动态方程以单输入-多输出受控对象动态方程为例:(5-1)将对象状态向量通过待设计的参数矩阵即状态反馈行矩阵,负反馈至系统的参考输入,于是存在(5-2)这时便构成了状态反馈系统,见图5-1。
图5-1 状态反馈系统结构图(5-3)(5-4)式中v为纯量,为维向量,为维矩阵,为维向量,为维行矩阵,为维向量,为维矩阵。
为闭环状态阵,为闭环特征多项式。
二、用状态反馈使闭环极点配置在任意位置上的充要条件是:受控对象能控证明若式(5-1)所示对象可控,定可通过变换化为能控标准形,有若在变换后的状态空间内引维状态反馈矩阵:(5-5)其中分别为由状态变量引出的反馈系数,则变换后的状态反馈系统动态方程为:(5-6)(5-7)式中(5-8)该式与仍为能控标准形,故引入状态反馈后,系统能控性不变。
特征方程为:(5-9)显见,任意选择阵的个元素,可使特征方程的个系数满足规定要求,能保证特征值(即闭环极点)任意配置。
将逆变换代入式(5-6),可求出原状态空间内的状态反馈系统状态方程:(5-10)与式(5-3)相比,式(5-10)所示对象应引入状态反馈阵为:(5-11)需指出,当受控对象可控时,若不具有能控标准形形式,并不必象如上证明那样去化为能控标准形,只要直接计算状态反馈系统闭环特征多项式,这时,其系数为的函数,与给定极点的特征多项式系数相比较,便可确定。
能控的多输入-多输出系统,经如上类似分析可知,实现闭环极点任意配置的状态反馈阵K为维。
若受控对象不稳定,只要有能控性,完全可由状态反馈配置极点使系统稳定。
状态变量受控情况下,引入状态反馈表示增加一条反馈通路,它能改变反馈所包围环节的传递特性,即通过改变局部回路的极点来改变闭环极点配置。
不能控状态变量与控制量无关,即使引入状态反馈,对闭环极点位置也不会产生任何影响,这是因为传递函数只与系统能控、能观测部分有关的缘故。
若不能控状态变量是稳定的状态变量,那么系统还是能稳定的,否则,系统不稳定。
现代控制理论 第5章线性时不变系统的多项式矩阵描述
2021/4/27
7
(3)前两种情况的组合
P(s),Q(s)非左互质,消去其gcld H(s), 得
H 1(s)P(s) (s) H 1(s)Q(s)u(s)
y(s)
R(s)
(s)
W
(s)u(s)
再消去H 1(s)P(s)和R(s)的gcrd F (s) ,即做代换
(s) F (s) (s)
2021/4/27
8
5.2 PMD的状态空间实现
一. PMD实现的定义
给定{P(s),Q(s),R(s),W(s)},若能找到状态空 间描述{A,B,C,E(p)},使
R(s)P1(s)Q(s) W (s) C(sI A)1 B E(s) 则称{A, B,C, E( p)}为给定PMD的实现.
P(s)F (s) (s) Q(s)u(s)
y(s) R(s)F (s) (s) W (s)u(s) 设 (s) F (s) (s),则
P(s) (s) Q(s)u(s)
y(s) R(s) (s) W (s)u(s)
不可简约
rank P(s) Q(s) rank P(s) Q(s) ,故P(s),Q(s)左互质.
则:{系统完全能控且能观} g(s)无零极点相消 {系统完全能控} adj(sI-A)b和(s)无零极对消现象 {系统完全能观} c adj(sI-A)和(s)无零极对消现象
2021/4/27
14
5.4 传输零点和解耦零点
• 一般地,系统的零、极点与传递函数矩阵的零极点不是 等同的,后者包含在前者之中,是前者的一个子集。
• 注:PMD实现具有强不唯一性
二 .构造PMD实现的方法
以构造观测器形实现为最简便 已知:{P(s),Q(s),R(s),W(s)}, 求实现
《现代控制理论基础》第2版 现代控制理论基础_上海交通大学_施颂椒等_PPT_第5章

① 定义 有理函数 g(s) 当s 时,
② g(假)设
常n数(s〔) d(s) g(s)〕, 就称为正那么有理函数。
③ g假( 设)那么有理函数。
④
假g(设) 〔 n(s)d(s)
g(〕s) , 就是 非正那么有理函数。
有理函数阵 G (s) 假设G() 0 ,那G (s么) 是严格正那么有理函数阵〔其每个元均为
G (s) C (sI A )1BD
那么(称A,B,C,D) 是G (s) 的一个实现。
•实现研究的问题
⑴ G (s)可实现为 (A,B,C,D) 的条件问题 ⑵ G (s) 实现的方法
〔5-1〕
•最小实现
如果 (A,B,C,D)是G (s) 的一个实现,那么其所有等价系统也都是其 实现 。 G (s) 可有不同维数的实现,其中维数最小的实现称为最小实 现。它描述了系统的既能控又能观的局部。通常要求的实现 为最小实现。
s 1 s4 s(s1) (s1)s(3) (s1)s(3)
s
1
3
s(s 1 )s( 2 ) (s 1 )s( 2 )s( 3 ) s(s 1 )s( 2 )s( 3 )
G (s) 的特征多项式为:s(s1)s(2)s(3),deG g(s)4。
⑵ G (s) 可实现为 (A,B,C,D) 的条件
③ 非正那么传递函数〔G() 〕,也存在实现,其实现具有
④ 如下形式
Ex(t)A(xt)Bu(t) y(t)Cx(t)Du(t)
〔5-9〕
式中 E为奇异阵。这种形式的系统称为广义系统,或奇异 系统。(本书不予讨论,在专门文献中研究)
5.2.2 最小实现的性质
如果将例〔5-5〕的传递函数阵写成
G ( s ) G 1 ( s )G 2 ( s )
现代控制理论完整版
现代控制理论HEN system office room 【HEN16H-HENS2AHENS8Q8-HENH1688】1、什么是对偶系统,从传递函数矩阵,特征多项式和能控、能观性说明互为对偶的两个系统之间的关系。
答:定义:如果两个系统满足A2=A1T,B2=C1T,C2=B1T,则称这两个系统互为对偶函数。
互为对偶系统传递函数矩阵互为转置特征多项式相同,一个函数的能控性等价于另一个函数的能观性。
2、什么是状态观测器?简述构造状态观测器的原则。
答:系统的状态不易检测,以原系统的输入和输出为输入量构造,一动态系统,使其输出渐近于原系统状态,此动态系统为原系统的状态观测器。
原则:(1)观测器应以原系统的输入和输出为输入量;(2)原系统完全能观或不能观于系统是渐近稳定的;(3)观测器的输出状态应以足够快速度超近于原系统状态;(4)有尽可能低的维数,以便于物理实现。
3、说明应用李氏第二法判断非线性系统稳定性基本思想和方法步骤和局限性。
答:基本思想:从能量观点分析平衡状态的稳定性。
(1)如果系统受扰后,其运动总是伴随能量的减少,当达到平衡状态时,能量达到最小值,则此平衡状态渐近稳定:(2)如果系统不断从外界吸收能量,储能越来越大,那么这个平衡状态就是不稳定的:(3)如果系统的储能既不增加也不消耗,那么这个平衡状态时李亚普诺夫意义下的稳定。
方法步骤:定义一个正定的标量函数V(x)作为虚构的广义能量函数,然后根据V(x)=dV(x)/dt的符号特征来判别系统的稳定性。
局限性:李雅普诺夫函数V(x)的选取需要一定的经验和技巧。
4、举例说明系统状态稳定和输出稳定的关系。
答:关系:(1)状态稳定一定输出稳定,但输出稳定不一定状态稳定;(2)系统状态完全能观且能控=状态稳定与输出稳定等价。
举例:A的特征值 =-1 =1 所以状态不是渐进稳点的,W(s)的极点S=-1,所以输出稳点。
5、什么是实现问题什么是最小实现说明实现存在的条件。
《现代控制理论》第3版课后习题答案
《现代控制理论参考答案》第一章答案1-1 试求图1-27系统的模拟结构图,并建立其状态空间表达式。
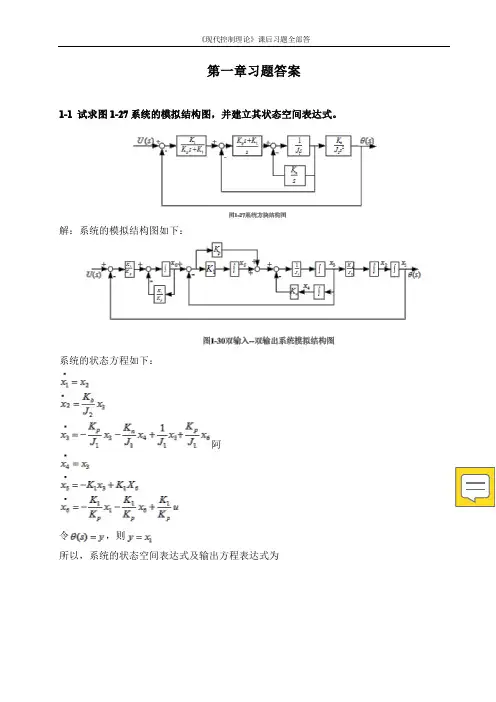
11K s K K p +sK s K p 1+s J 11sK n 22s J K b -++-+-)(s θ)(s U 图1-27系统方块结构图解:系统的模拟结构图如下:)(s U )(s θ---+++图1-30双输入--双输出系统模拟结构图1K pK K 1pK K 1+++pK n K ⎰⎰⎰11J ⎰2J K b ⎰⎰-1x 2x 3x 4x 5x 6x系统的状态方程如下:u K K x K K x K K x X K x K x x x x J K x J x J K x J K x x J K x x x pp p p n pb1611166131534615141313322211+--=+-==++--===••••••令y s =)(θ,则1x y =所以,系统的状态空间表达式及输出方程表达式为[]⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡-----=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡••••••654321165432111111112654321000001000000000000010010000000000010x x x x x x y uK K x x x x x x K K K K K K J K J J K J K J K x x x x x x p p pp npb1-2有电路如图1-28所示。
以电压)(t u 为输入量,求以电感中的电流和电容上的电压作为状态变量的状态方程,和以电阻2R 上的电压作为输出量的输出方程。
R1L1R2L2CU---------Uc ---------i1i2图1-28 电路图解:由图,令32211,,x u x i x i c ===,输出量22x R y =有电路原理可知:•••+==+=++3213222231111x C x x x x R x L ux x L x R 既得22213322222131111111111x R y x C x C x x L x L R x u L x L x L R x =+-=+-=+--=•••写成矢量矩阵形式为:[]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎣⎡----=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡32121321222111321000*********x x x R y u L x x x CCL L R L L R x x x 。
现代控制理论课后答案(俞立)第五章
《现代控制理论》第5章习题解答5.1 已知系统的状态空间模型为Cx y Bu Ax x =+=, ,画出加入状态反馈后的系统结构图,写出其状态空间表达式。
答:具有状态反馈的闭环系统状态空间模型为:u Kx =−+v ()xA BK x Bv y Cx=−+=相应的闭环系统结构图为闭环系统结构图5.2画出状态反馈和输出反馈的结构图,并写出状态反馈和输出反馈的闭环系统状态空间模型。
答:具有状态反馈的闭环系统状态空间模型为u Kx =−+v ()xA BK x Bv y Cx=−+=相应的反馈控制系统结构图为具有输出反馈的闭环系统状态空间模型为u Fy =−+v ()x A BFC x Bv y Cx=−+=相应的反馈控制系统结构图为后案网 ww w.kh d5.3 状态反馈对系统的能控性和能观性有什么影响?输出反馈对系统能控性和能观性的影响如何?答:状态反馈不改变系统的能控性,但不一定能保持系统的能观性。
输出反馈不改变系统的能控性和能观性。
5.4 通过检验能控性矩阵是否满秩的方法证明定理5.1.1。
答:加入状态反馈后得到闭环系统K S ,其状态空间模型为()x A BK x Bv y Cx=−+=开环系统的能控性矩阵为0S 1[,][]n c A B BAB A B −Γ="闭环系统K S 的能控性矩阵为 1[(),][()()]n cK A BK B B A BK B A BK B −Γ−=−−"由于222()()()()(A BK B AB BKBA BKB A ABK BKA BKBK B)A B AB KB B KAB KBKB −=−−=−−+=−−−#以此类推,总可以写成的线性组合。
因此,存在一个适当非奇异的矩阵U ,使得()m A BK B −1,,,m m A B A B AB B −[(),][,]cK c A BK B A B U Γ−=Γ由此可得:若rank([,])c A B n Γ=,即有个线性无关的列向量,则n [(),]cK A BK B Γ−也有个线性无关的列向量,故n rank([(),])cK A BK B n Γ−=5.5 状态反馈和输出反馈各有什么优缺点。
多项式矩阵理论
6.1 多项式及其互质性
1 多项式及其性质
以复数 s 为自变量的实系数多项式 d(s)
d (s) dnsn dn1sn1 d1s d0 , s C, di R, i 0,1,2,n
❖ d(s) 的次数
:n = deg d(s);
❖ d(s)为n 次多项式 :最高次幂系数dn ≠ 0;
可化简有理函数:倘若g(s) = n(s)/d(s)中, n(s)和d(s)不互质。
6.2 多项式矩阵及其属性
1 多项式矩阵
多项式矩阵:以多项式为元素的矩阵。
以aij(s)为元素的m×n多项式矩阵A(s)记为
a11(s) a1n (s)
A(s)
am1(s) amn (s)
【例6-3】一个2×3的多项式矩阵
最大公因式:如果 r(s) 是 d(s) 和 n(s) 的公因式,而且可被 d(s) 和 n(s) 的每个 公因式整除,则称 r(s) 是 d(s) 和 n(s) 的最大公因式。
注:若r(s) 最大公因式,c为常数,则cr(s)也是最大公因式,若限定r(s) 为首一多项式,则最大公因式具有唯一性。
互质多项式:如果 d(s) 和 n(s) 的最大公因式是(与 s 无关的)非零常数,则称 d(s) 和 n(s) 为互质多项式,简称 d(s) 和 n(s) 互质。
第六章
多项式矩阵理论 (数学基础部分)
引言(经典控制理论、现代控制理论、多项式矩阵理论的应用)
50年代以前,以控制理论和电路理论为两大支柱的线性系统理论已经发展成为相当成熟的 “经典线性系统理论”。
经典线性系统理论的主要特征: 研究对象 → 线性定常单变量系统; 数学工具 → 复变函数(特别是傅里叶变换和拉普拉斯变换); 研究方法 → 频率响应法; 理论优点 → 输入、输出和反馈信号的物理概念清晰、易于测量; 理论缺点 → ⑴ 只能反映系统的外部特性和行为,是一种外部描述法; ⑵ 设计自由度小、指标模糊,需要反复试凑才能完成任务。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2019/11/10
12
5.3 多项式矩阵描述的互质性 和状态空间描述的能控性与能观测性
• 互质性与能控性、能观性的等价性
1.给定{P(s),Q(s),R(s),W(s)},其维数为n=deg detP(s)=dimA
的一个实现为{A,B,C,E(p)},则
• 注:PMD实现具有强不唯一性
二 .构造PMD实现的方法
以构造观测器形实现为最简便 已知:{P(s),Q(s),R(s),W(s)}, 求实现
2019/11/10
9
• 思路: – 前面已讲过的MFD实现方法,要求分母矩阵行 (列)既约,严格真;
– 在P(s)ζ(s)=Q(s)u(s)中,先求 (s)P 1(s)Q (s)u(s)
-总之
Co(sI Ao)1Bou(s) Y(s)u(s)
y(s)R(s)(s)W(s)u(s)
R(s)Co (sIAo)1Bou(s)[R(s)Y(s)W(s)]u(s)
X(s)(sIAo)C
C(sIAo)1Bou(s)[X(s)BoR(s)Y(s)W(s)]u(s)
注:它是系统的内部描述,是最一般的描述。
2019/11/10
3
二. PMD和其他描述的关系
1 多项式矩阵的传递函数矩阵
G (s) R (s)P 1 (s)Q (s) W (s)
2 状态空间描述的PMD
给 定 y x C A x x E B (ur1观(s)Q 测r(器s) 形实现,则
PMD的一个实现(A,B,C,E(p))为:
最小实现
A C [
Ao R(
, s
B Bo )Co ]s
A
E
(
p)
E(s)
|s
p
当且仅当PMD为不可简约时,其维数为
n=deg detP(s)的任何实现均为最小实现。
第5章 线性时不变系统的 多项式矩阵描述
5.1 多项式矩阵描述(PMD) 5.2 多项式矩阵描述的状态空间实现 5.3 多项式矩阵描述的互质性和状态空间描
述的能控性与能观测性 5.4 传输零点和解耦零点 5.5 系统矩阵和严格系统等价
主要的数学描述
输入 输出 描述
状态 空间 描述
矩阵 分式 描述
系统 矩阵 描述
则状态空间描述等价的PMD为:
(SIA)ˆ(s)Buˆ(s)
yˆ(s)Cˆ(s)E(s)uˆ(s)
2019/11/10
4
3.矩阵分式描述的PMD
给 定 G (s ) N (s )D 1 (s )+ E (s )
则等价的PMD为: D(s)ˆ(s)Iuˆ(s) yˆ(s)N(s)ˆ(s)E(s)uˆ(s)
(s) F (s) (s)
H 1 ( s ) P ( s ) F 1 ( s ) ( s ) H 1 ( s)Q ( s )u ( s )
y(s)
R(s)F
1 ( s )
(s)
W
( s )u ( s )
P(s) H 1(s)P(s)F 1(s),Q (s) H 1(s)Q (s)
C(sIAo)1Bou(s)E(s)u(s)
实现为 2019/11/10 {A,B,C,E(p)}
11
[结论]
对线性时不变系统的PMD(P(s),Q(s),R(s),W(s)),
表 P 1 ( s ) Q ( s ) P r 1 ( s ) Q r ( s ) P r 1 ( s ) Q r ( s ) Y ( s )
2019/11/10
2
5.1 多项式矩阵描述(PMD)
一 多项式矩阵描述的形式
多输入多输出线性定常系统:
输 入 u=u1,广 义 状 态 =1, 输 出 y=y1
up
m
yq
系统的多项式矩阵描述为:
P(s)(s)Q (s)u(s) y(s)R(s)(s)W (s)u(s)
R(s) R(s)F 1(s),W (s)
{P (s), Q (s), R (s),W (s)}即 为 不 可 简 约
2019/11/10
8
5.2 PMD的状态空间实现
一. PMD实现的定义
给定{P(s),Q(s),R(s),W(s)},若能找到状态空 间描述{A,B,C,E(p)},使
R(s)P1(s)Q (s)W (s)C(sIA)1BE(s) 则{称 A,B,C,E(p)为 } 给 PM 定 的 D实 . 现
6
2019/11/10
7
(3)前两种情况的组合
P(s),Q(s)非左互质,消去其gcld H(s), 得
H 1(s)P (s) (s) H 1(s)Q (s)u (s)
y(s)
R (s)
(s)
W
(s)u
(s)
再 消 去 H 1 (s) P (s)和 R ( s)的 gcrd F (s ) ,即 做 代 换
2019/11/10
strictly proper
10
-对 Pr1(s)Q求r(s观) 测器形实现(利用上节方法), 得 {Ao,Bo,C必o}有,
Co(sI Ao)1Bo Pr1(s)Qr (s) ( Ao , Co )observable
(s) [Pr1(s)Qr (s) Y(s)]u(s)
的实现。 • 步骤:
– 先把 P1(s)Q化(s成) 满足左MFD求实现的条件,即 P(s)化为行既约, Pr1(s)严Qr(格s)真;
(s)P1(s)Q(s)u(s)[M(s)P(s)]1[M(s)Q(s)]u(s)
Pr(s)
Qr(s)
Pr1(s)Qr(s)u(s)[Y(s)Pr1(s)Qr(s)]u(s)
三.不可简约PMD
不可简约PMD:{P(s),Q(s)}左互质,且{P(s),R(s)}
右互质
不可简约PMD不唯一
{P(s),Q(s),R(s),W(s)}不可简约
{U(s)P(s)V(s),U(s)Q(s),R(s)V(s),W(s)}不可简约
U(s),V(s)为单模矩阵
2019/11/10
5
2019/11/10