毕业设计(论文)-空间3-rps并联机构的运动分析与仿真[管理资料]
基于ANSYS的3-RPS型柔顺并联机构的运动仿真
SCIENTIST90 柔顺并联机构[1]是通过部分或整体柔性杆件的弹性变形来产生位移和传递运动、力或能量的机构,是将并联机构和柔性机构优点的有机结合。
1983年Hunt 提出3-RPS 型并联机构的构型和相关理论。
Lee 将这种机构应用于微动机器人;黄真[2]等于1996年根据螺旋理论探究了该机构的运动学特征,建立了运动学及动力学模型。
本文根据3-RPS 型并联机构的运动特性,在并联机构的基础上设计柔顺并联机构,利用ANSYS 软件分析柔顺并联机构的运动特性及运动的数量级,为柔顺并联机构用于微动平台提供理论研究。
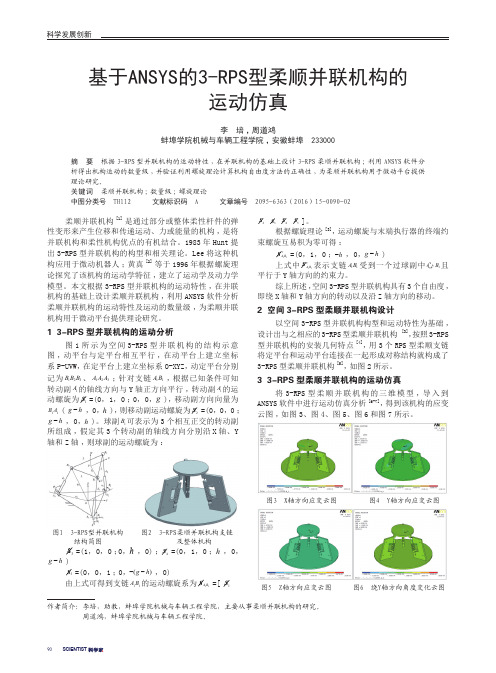
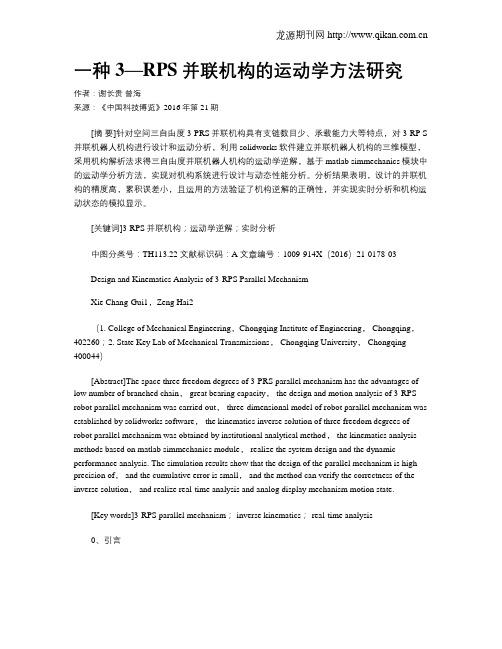
1 3-RPS 型并联机构的运动分析图1所示为空间3-RPS 型并联机构的结构示意图,动平台与定平台相互平行,在动平台上建立坐标系P-UVW,在定平台上建立坐标系O-XYZ,动定平台分别记为123B B B 、123A A A ;针对支链11A B ,根据已知条件可知转动副1A 的轴线方向与Y 轴正方向平行,转动副1A 的运动螺旋为1S =(0,1,0;0,0,g ),移动副方向向量为11B A (g h −,0,h ),则移动副运动螺旋为2S =(0,0,0;g h −,0,h )。
球副1B 可表示为3个相互正交的转动副所组成,假定其3个转动副的轴线方向分别沿X 轴、Y 轴和Z 轴,则球副的运动螺旋为:图1 3-RPS型并联机构 图2 3-RPS柔顺并联机构支链结构简图 及整体机构3S =(1,0,0;0,h ,0);4S =(0,1,0;h ,0,g h −)5S =(0,0,1;0,()g h −−,0)由上式可得到支链11A B 的运动螺旋系为11A B S =[1S 2S 3S 4S 5S ]。
根据螺旋理论[3],运动螺旋与末端执行器的终端约束螺旋互易积为零可得:11r A B S =(0,1,0;h −,0,g h −)上式中11rA B S 表示支链11A B 受到一个过球副中心1B 且平行于Y 轴方向的约束力。
3-RPS并联稳定平台设计与仿真研究

Z
(Heave)
(Roll) X
(Pitch) Y
图 1 பைடு நூலகம்船六自由度运动示意图
作者简介:张峰(1989-) ꎬ男ꎬ安徽淮北人ꎬ硕士研究生ꎬ主要研究方向为计算机应用技术ꎬ机器人学ꎬ嵌入式系统方向等ꎮ
Keywords:warshipꎻ parallel stable platformꎻ workspaceꎻ dynamic simulation
0 引言
随着我国军事科技的发展ꎬ舰载平台机构也在飞速发 展ꎮ 舰船在海面上行驶ꎬ不可避免发生不稳定运动ꎬ会对 舰船上摄像系统的正常工作产生不良影响ꎮ 因此需要一 种稳定平台来隔离舰船的不稳定运动ꎬ从而保障摄像系统 的稳定ꎮ
Research on Design and Simulation of 3-RPS Parallel Stable Platform
ZHANG Fengꎬ JIA Yinliangꎬ ZHANG Chiyuꎬ LIANG Kangwu ( College of automation Engineeringꎬ Nanjing University of Aeronautics & Astronauticsꎬ Nanjing 211106ꎬ China) Abstract: To prevent the influence of the wave motion in warship travelling on the camera systemꎬ this paper designs the 3-RPS
目前采用的机械稳定平台ꎬ多为传统的二、三轴串联 转动平台ꎮ 如陕西某公司研制的舰载 X-Y 型两轴稳定平 台ꎬ利用惯性导航设备检测舰船摇荡参数ꎬ通过伺服系统 分别驱动横摇轴、纵摇轴使平台向载体转动相反方向旋 转ꎬ从而保证载体方位轴始终垂直指向大地[1] ꎮ 南京某 大学研制的船载卫星通讯系统稳定平台ꎬ采用三轴( 方 位、横滚、俯仰) 稳定、两轴( 方位、俯仰) 指向的稳定系统 结构[2] ꎮ 这类平台是一种集光机电一体的现代化设备ꎬ 在飞行器、舰船等领域有着广泛的应用ꎬ当作为稳定平台 使用时ꎬ只能隔离转动[3] ꎮ 并联平台也可以作为舰船的 稳定平台来使用ꎮ 并联稳定平台具有负载大、精度高、响 应速度快等优点ꎬ在隔离舰船的转动同时可以部分补偿舰 船的垂荡运动ꎮ
一种3—RPS并联机构的运动学方法研究
一种3—RPS并联机构的运动学方法研究作者:谢长贵曾海来源:《中国科技博览》2016年第21期[摘要]针对空间三自由度3-PRS并联机构具有支链数目少、承载能力大等特点,对3-RP S 并联机器人机构进行设计和运动分析,利用solidworks软件建立并联机器人机构的三维模型,采用机构解析法求得三自由度并联机器人机构的运动学逆解,基于matlab simmechanics模块中的运动学分析方法,实现对机构系统进行设计与动态性能分析。
分析结果表明,设计的并联机构的精度高,累积误差小,且运用的方法验证了机构逆解的正确性,并实现实时分析和机构运动状态的模拟显示。
[关键词]3-RPS并联机构;运动学逆解;实时分析中图分类号:TH113.22 文献标识码:A 文章编号:1009-914X(2016)21-0178-03Design and Kinematics Analysis of 3-RPS Parallel MechanismXie Chang-Gui1,Zeng Hai2(1. College of Mechanical Engineering,Chongqing Institute of Engineering, Chongqing,402260;2. State Key Lab of Mechanical Transmissions, Chongqing University, Chongqing 400044)[Abstract]The space three freedom degrees of 3-PRS parallel mechanism has the advantages of low number of branched chain, great bearing capacity, the design and motion analysis of 3-RPS robot parallel mechanism was carried out, three-dimensional model of robot parallel mechanism was established by solidworks software, the kinematics inverse solution of three freedom degrees of robot parallel mechanism was obtained by institutional analytical method, the kinematics analysis methods based on matlab simmechanics module, realize the system design and the dynamic performance analysis. The simulation results show that the design of the parallel mechanism is high precision of, and the cumulative error is small, and the method can verify the correctness of the inverse solution, and realize real-time analysis and analog display mechanism motion state.[Key words]3-RPS parallel mechanism; inverse kinematics; real-time analysis0、引言并联机器人具有刚度高、承载能力大、结构紧凑等优点,已成为机构学研究的一个重要方向,被广泛应用在工业成产中。
3-RPS型并联机构运动正解的研究

摘
要: 并联 机构 运 动 学正解 是 一个位 置和姿 态耦 合 的复 杂非 线性 问题 , 一 般 难 以求得封 闭形
式的解析 解 . 应 用解析 法对 3一R P S型 并联 机 构进行 运 动 学正 解 问题 进 行 了求解 , 并 给 出正解 方 程 通 式以及 各项 系数值 , 得 到封 闭形式 的解析 解. 并 给 出具体 数 值 实例 进 行 求 解 , 得 出全 部 位 置 解, 同时给 出部 分机构 空间 图形验证 了解 法可靠性 .
机构 的运 动学 分析包 括 两种 问题 , 即运动 学正 解 和运动 学反解 . 运动 学 正 解 ( 即 已知输 入 杆 长 参
运 动 平
数求出运动平台的位置和姿态 ) 是解决机构速度、 加 速度 以及其 他 的受力 分析 、 工 作空 间分 析和 机构 综合等问题的基础 . 4 ] , 而运 动学正解却包含 非线 性方程组而十分复杂. 求解正解通常采用解析法和 数 值法 , 数值法多采用 N e w t o n—R a p h s o n法 、 杆 长 修正法、 同伦连续法 等等 J , 但是这种方法不一 定 能得 到运动 学正 解 的全部 解 , 而且 对初 值 的要求 较高 , 解 析 法 包括 矢 量 代 数法 、 几何 法 、 矩 阵法 、 对 偶 矩 阵法 、 螺旋 代 数法 、 四元 素代 数法 等 等 - l J . 本 文对 3一R P S型 并 联 机 构 进 行 运 动 学 正 解 应用几何解析法进行 了求解 , 得到全部的位置解 ,
并 给 出对 应ቤተ መጻሕፍቲ ባይዱ空 间图形 , 验证 实数 解 的正 确性 .
f 支 链
固 定
1 建 立 坐 标 系及 约 束 方 程
《内(RPS+3SPS)外(PRS+3SPS)环嵌套机构运动学分析与模拟》范文

《内(RPS+3SPS)外(PRS+3SPS)环嵌套机构运动学分析与模拟》篇一一、引言在现代机械设计与自动化控制中,复杂的机械机构与高精度的运动控制成为提高产品性能的关键因素。
本篇文章旨在研究内(RPS+3SPS)与外(PRS+3SPS)环嵌套机构的运动学特性,通过深入的分析与模拟,探讨其运动规律、动力学特性和优化策略。
二、机构概述该嵌套机构由内环和外环两部分组成。
内环采用RPS+3SPS 结构,外环采用PRS+3SPS结构。
RPS表示一个旋转副(Rotation Pair)与两个移动副(Prismatic Pair)的组合,而3SPS则表示三个球面副(Spherical Pair)。
PRS则代表一个移动副与两个旋转副的组合。
这种复杂的结构能够实现在三维空间内的精确运动和位置调整。
三、运动学分析1. 运动学模型建立基于机构的几何结构和运动关系,建立其运动学模型。
通过数学公式和几何关系,描述各部件的运动规律和位置变化。
2. 参数化建模将机构的运动参数(如速度、加速度、转角等)进行参数化处理,以便于后续的模拟和优化分析。
3. 运动轨迹分析分析机构在特定输入条件下的运动轨迹,包括各部件的相对位置变化和整体的运动模式。
4. 动力学分析通过动力学分析,研究机构在运动过程中的力、力矩和能量变化情况,为优化设计提供依据。
四、模拟与实验1. 模拟软件选择选用专业的机械仿真软件进行机构的模拟分析。
该软件具有强大的建模、分析和可视化功能,能够满足本研究的需要。
2. 模拟过程与结果根据运动学模型和参数化建模结果,进行模拟分析。
通过改变输入参数,观察和分析机构的运动轨迹、速度、加速度等变化情况。
同时,记录模拟过程中的数据,为后续的优化提供依据。
3. 实验验证为了验证模拟结果的准确性,进行实际实验。
通过实验数据与模拟数据的对比,评估机构的性能和运动学特性。
五、优化策略与展望1. 优化策略根据模拟和实验结果,提出优化策略。
3PRS并联机构的运动学和误差分析

3PRS并联机构的运动学和误差分析目录一、内容概述 (1)二、概述并联机构及运动学基础 (2)三、3PRS并联机构的运动学分析 (3)3.1 机构描述与基本结构 (5)3.2 运动学建模与方程建立 (6)3.3 运动学仿真与结果分析 (7)四、误差来源及分类分析 (8)4.1 制造误差分析 (9)4.2 安装误差分析 (10)4.3 运行误差分析 (11)五、误差模型建立与误差计算 (12)5.1 误差模型的建立方法 (13)5.2 误差计算过程及影响因素分析 (15)5.3 误差优化策略探讨 (16)六、实验验证与结果讨论 (17)6.1 实验目的与实验方案制定 (18)6.2 实验数据与结果分析对比讨论 (19)七、结论总结与展望未来发展方向分析 (20)一、内容概述本文档旨在探讨“3PRS并联机构的运动学和误差分析”。
我们需要理解并联机构及其重要性,并联机构是一种多输入多输出的机械结构,广泛应用于各种精密制造和加工领域。
3PRS并联机构以其独特的结构特点和性能优势,在机器人技术、航空航天等领域发挥着重要作用。
运动学分析:这一部分的重点在于理解3PRS并联机构的基本运动特性。
这包括对其运动学模型的建立,对其关节、连杆和末端执行器等部件的运动分析,以及对整体运动性能的优化。
理解这些基本知识,对于我们进行误差分析是非常重要的基础。
误差建模:由于在实际应用中,各种因素如制造误差、装配误差等都会对并联机构的运动性能产生影响,因此误差建模是本文的重要部分。
在这一部分,我们将详细介绍如何建立3PRS并联机构的误差模型,并分析误差来源和影响。
我们还将探讨如何对误差进行量化评估。
误差分析:基于建立的误差模型,我们将对3PRS并联机构的误差进行详细的定量和定性分析。
这包括分析误差的分布特性、对运动性能的影响等。
我们还将探讨如何通过优化结构设计、改进制造工艺等方法来减小误差,提高并联机构的运动性能。
实验验证:为了验证理论分析的正确性,本文将介绍相关的实验验证工作。
3—RPR并联机构的位姿分析及其运动仿真

A G R IC U L T U R A L T E C H N O L O G Y &E Q U IP M E N T2016.12总第324期Wu Zhenhua()In this paper,the 3-RPR parallel mechanism is taken as a research object.The position and pose of 3RPR paral-lel mechanism are analyzed.The positive solution and inverse solution of the mechanism position are obtained.Getting six group of solutions,then make the motion simulation through software UG,displacement,velocity and acceleration curve are obtained by individual axle drive and three axis drive.The results provide a basis for further research and development of the 3-RPR parallelmechanism.3-RPR mechanism,Position and orientation analysis,Motion simulation3-R P R 并联机构的位姿分析及其运动仿真武振华(山西农业大学信息学院,山西太谷030800)摘要以3-R P R 并联机构为研究对象,对机构进行了运动分析,计算机构的位姿正解和反解,得出机构的六组解,然后用U G 软件对机构进行运动分析仿真,分别对于单轴驱动和三轴驱动下机构的动平台的位移,速度和加速度的分析,为该机构的以后的分析研究和开发奠定了基础。
3—RPS柔性并联定位机构运动学分析与仿真

3—RPS柔性并联定位机构运动学分析与仿真作者:孟彩茹等来源:《科技创新与应用》2014年第04期摘要:对具有空间三自由度的3-RPS柔性并联定位机构进行了运动学分析及仿真。
首先,以3-RPS并联机构为基础,将机构中的运动副用柔性铰链代替,研制了一台具有三自由度的精密定位机构;其次采用“伪刚体模型”方法将该精密定位工作台等效为伪刚体模型,利用齐次坐标变换方法和矢量闭环方法构建其逆运动学模型;最后,利用软件RecurDyn进行仿真分析,测量出其位移与速度随时间的变化曲线进行验证。
结果表明所建立的机构理论模型合理,且机构具有良好的运动学性能。
关键词:柔性并联机构;伪刚体模型;运动学引言随着纳米技术的兴起与迅猛发展,具有高分辨率和高精度的超精密定位机构在近代科学的研究领域以及尖端工业生产中都扮演着越来越重要的角色,它的各项技术指标已经成为各国高新技术发展水平的重要标志[1]。
运动学分析是机械系统分析中的首要问题。
并联机构的运动学分析主要包括求解机构的输入与输出构件之间的位置、速度以及加速度的关系[2]。
全柔性机构的首要目标就是精确实现所需的运动,因此对其运动学的研究在机构学领域占有重要的地位[3]。
1 机构描述如图1所示为3-RPS空间三自由度柔性并联定位机构的仿真模型。
该机构的定平台与动平台通过三条完全相同的RPS支链相连。
压电陶瓷驱动器位于三个平行板式柔性铰链中,通过平行板式柔性铰链的变形来带动与之相连的杆件进行运动,从而达到驱动整个柔性并联机构实现空间运动的目的。
2 建立伪刚体模型及分析普渡大学的Her I为了体系化的研究柔性机构问题,提出了“伪刚体模型”的概念,该方法是将柔性杆与柔性运动副等效简化为相应的刚性杆、刚性运动副所组成的纯刚性模型,再利用刚性体结构学及运动学对机构进行分析和综合[4]。
2.1 机构自由度计算2.2 运动学逆解分析用封闭向量表示,如图3所示2.3 速度分析3 基于RecurDyn的运动学仿真3.1 基于ANSYS创建*.rfi文件在ANSYS软件中基于CMS生成RFI文件包括如下四步:(1)在ANSYS中建立有限元模型:用SOLIDWORKS软件建立柔性铰链实体模型,将其导入ANSYS里,选择求解精度较高的Solid45单元,它是一种高阶单元,适于各种较复杂的实体模型。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
毕业设计(论文)题目:空间3-RPS并联机构的运动分析与仿真题目类型:论文型学院:机电工程学院专业:机械工程及自动化年级:级学号:学生姓名:指导教师:日期: 2010-6-11摘要3-PRS并联机构是空间三自由度机构,该机构具有支链数目少、结构对称、驱动器易于布置、承载能力大、易于实现动平台大姿态角运动等特点,目前已在工程中得到成功应用。
本文基于空间机构学理论,对3-RPS并联机构进行了相关的运动学分析。
在对机构结构分析的基础上,对机构的输出位姿参数进行了解耦分析,得到了机构输出参数间的解耦关系式;用解析法推导了机构的位置反解方程;用数值法实现了机构的位置正解;依据驱动副行程、铰链转角、连杆尺寸干涉等限制因素确立约束条件,利用极限边界搜索算法搜索了3-PRS并联机构的工作空间,分析了该机构工作空间的特点,并进行了工作空间体积计算。
最后基于ADAMS软件平台,建立了3-RPS并联机构的三维实体简化模型,对3-RPS并联机构的运动进行了仿真。
本文的研究为3-RPS并联机构的结构设计与应用提供了参考。
关键词:3-PRS并联机构;位置正解;位置反解;工作空间;运动仿真ABSTRACT3-PRS parallel mechanism is a three degrees of freedom of space agencies, the agency has a small number of branched-chain, structural symmetry, the drive is easy layout, carrying capacity, easy to implement a large moving platform attitude angle motion and other characteristics, has been successfully applied in engineering . Based on the theory of space agencies, on the 3-RPS parallel mechanism was related to kinematics analysis. In the analysis of the structure, based on the position and orientation of the body of the output parameters of the decoupling analysis, the decoupling of the output parameters of the relationship; analytic method derived by inverse position equations institutions; achieved by numerical methods body forward position; based driver Vice trip, hinge angle, rod size interference and other constraints set constraints, using the limit boundary search algorithm for searching for the 3-PRS parallel mechanism of the working space, analysis of the sector space characteristics, and a working space of volume. Finally, based on ADAMS software platform, the establishment of the 3-RPS parallel mechanism of three-dimensional solid simplified model of 3-RPS parallel mechanism of the movement is simulated. This study for the 3-RPS parallel mechanism structure provides a reference design and application.Key word: 3-PRS parallel mechanism; forward position;inverse position;workspace ;motion simulation.目录摘要IIABSTRACT III前言VII第1章绪论1课题研究的意义 1并联机构简介 2并联机构的国内外发展现状 3少自由度机构介绍 6少自由度的研究意义 6少自由度并联机构的研究现状 (6)本文主要研究内容7第2章并联机构的组成原理及运动学分析 (9)引言9并联机构自由度分析9并联机构的组成原理10并联机构的研究内容11运动学分析11工作空间分析12本章小结13第3章3-PRS并联机构位置分析14引言14空间3-RPS并联机构14机构组成143-RPS并联平台机构的位姿描述 (15)3-RPS并联平台机构位姿解耦 (19)3-RPS并联平台机构的位姿反解203-RPS并联平台机构的位置正解23本章小结:25第4章3-RPS并联机构的工作空间分析 (26)引言263-RPS并联平台机构的工作空间分析 (26)机构的运动学约束263-RPS并联机构工作空间边界的确定 (28)工作空间分析算例29工作空间体积的计算方法29本章小结30第5章3-RPS并联机构的仿真与应用 313-RPS并联机构的的三维建模31ADAMS软件介绍313-RPS并联机构的建模313-RPS并联机构的运动仿真323-RPS并联机构的应用34本章小结37总结与体会38谢辞39参考文献40前言机构的发明与发展同人类的生产、生活息息相关,它促进着生产力的发展、生产工具的改进和人类生活水平的不断提高。
从三国时期诸葛亮的“木牛流马” 到捷克作家查培克笔下强壮的“ R o - b o t ” ,无不体现着人类对新技术、新机构的幻想与渴望。
并联机构的出现,使得机器人的研究、机床的研究出现了新的热点,弥补了串联机构的不足。
由于并联机构结构刚度好、承载能力大、位置精度高等优点,吸引了国内外工程界与学术界的广泛关注,几十年来,人们对并联机构的研究如火如荼,不断致力于新型并联机构的研发。
本文主要研究3-RPS并联机构,通过对其运动特点分析,位姿的正反解推导,及三维模型的建模与仿真,为以后的并联机构设计与应用打下基础。
第1章绪论随着科学技术的迅速发展,机械制造业正经历着前所未有的变化:生产自动化与高精度、高质量;经营策略从大规模生产到敏捷制造;竞争范围从国内市场扩展到全球市场。
无论是对制造模式的宏观研究,还是具体到工艺技术的微观研究,都在不断的推陈出新。
而空间并联机构在工业中的应用正是在这一时刻营运而生,她以所具有的刚度大、承载能力强、精度高、自重负荷小、动力性能好等一些列优点,与目前广泛应用的串联式机构在应用上构成互补关系。
并联机构的出现,不仅引起了世界各国的广泛关注,而且被誉为“机床结构的重大革命”,值得制造业给予高度的重视。
1.1课题研究的意义近年来,并联机构在机器人领域的广泛应用,以及在其他方面如雷达等领域的应用.使得并联机构日益被人们所认知。
如并联驱动机器人要比传统的串联机器人具有较高的刚度和精度,较高的承载与强度之比,而且驱动方便.因此,各种形式的并联机构在机器人中得到了应用.现有对并联机构的研究大多数仍然集中在6自由度Gough(stewart)机构上.不同的作者提出并分析了各种各样的6自由度并联机构.但是,许多工程的应用并不要求运动平台一定要有6个完整的自由度.减少机构的自由度数将会降低机构的总体费用.在许多文献中都论述了3自由度并联机构.工作空间是机器人操作器的工作区域,它是衡量机器人性能的重要指标,但是对3自由度RPS 型并联机构的工作空间的分析并不多.究其原因,RPS型并联机构只有3个独立的自由度,即如果要求得工作空间.必须求出三个移动自由度的坐标.这就要求通过解以一个移动和两个转动的坐标作为独立变量的方程来求解计算三个移动的变量.而这三个变量的方程是高度非线性的,势必会给方程的求解带来很大的困难(~般情况下是求数值解,解析解的工作量复杂较大),而且求出的三个移动变量的解也会不精确.本文对3自由度并联机构的分析,使得求解工作空间的问题变得相对简单而且可靠,便于应用。
在并联机床的研究上,并联机构是并联机床的理论和结构基础。
早在1890~1894年,Clerk [19]; Gough于1948年最先提出平台式并联机构,用于轮胎测试,并于1962年与Whitehall一起设计了由六个并行线性支链支撑两个平台的轮胎测试机;(如图6所示),《APlatform with Six Degrees of Freedom》,成就了其在并联机构研究行业的一世英名,随后6自由度并联机构被称为Stewart平台(也称作Stewart-Gough平台); 1978年,Hunt建议将Stewart平台用做机器人,并指出由于该机构同串连机构相比所具有的精度高、刚度高的优势,非常值得在机器人领域展开深入研究,这可以看作并联机构,特别是Stewart 平台在机器人领域的研究起点。
1979年MacCallion设计出第一台基于Stewart平台的机械手臂[21],将其应用在自动化装配上,从此以后Stewart平台也称作并联机器人。
20世纪80年代,人们对并联机构的应用研究主要放在各种并联机械手、机器人上,这期间出现了DELTA和HEXA并联机构,两者在90年代中后期都已经成功地进行了商品化,瑞士DEMAURREX的DELTA机器人(如图所示) 到2001年底时已经在世界各地卖出了500台套。
图1-1瑞士并联机器人图1-2 并联机床示意图1.2并联机构简介并联机构是一种新型的机构,具有传统串联机构无法比拟的优点,是串联机构的补充和发张,对于机床技术和机器人技术的发展具有重要作用。
机构的发明与发展同人类的生产、生活息息相关,它促进着生产力的发展、生产工具的改进和人类生活水平的不断提高。
从三国时期诸葛亮的“木牛流马”到捷克作家查培克笔下强壮的“Ro—bot”,无不体现着人类对新技术、新机构的幻想与渴望。
并联机构的出现,使得机器人的研究、机床的研究出现了新的热点,弥补了串联机构的不足。
由于并联机构结构刚度好、承载能力大、位置精度高等优点,吸引了国内外工程界与学术界的广泛关注,几十年来,人们对并联机构的研究如火如荼,不断致力于新型并联机构的研发。