3自由度并联机床的运动学和动力学研究(翻译)
3自由度并联机器人的运动学与动力学分析_刘善增

第 45 卷第 8 期 2009 年 8 月
机械工程学报
JOURNAL OF MECHANICAL ENGINEERING
Vo l . 4 5 N o . 8 Aug. 2009
DOI:10.3901/JME.2009.08.011
3 自由度并联机器人的运动学与动力学分析*
刘善增 1, 2 余跃庆 1 佀国宁 1 杨建新 1 苏丽颖 1
(1. 北京工业大学机械工程与应用电子技术学院 北京 100124; 2. 中国矿业大学机电学院 徐州 221116)
1 3-RRS 并联机器人的运动学分析
一种空间 3 自由度并联机器人的结构简图,如 图 1 所示。它由一个动平台 P1P2P3,三条支链 BiCiPi(i=1, 2, 3)和一个静平台(基座)B1B2B3 组成。其 中,动平台通过球面副(S 副)与各支链连接,静平台 通过转动副(R 副)与各支链连接,且 Bi 处转动副的 轴线与 Ci(i=1, 2, 3)处转动副的轴线对应平行。分别 建立与动平台固结的局部(动)坐标系 Pxyz 和系统 (固定)坐标系 OXYZ,如图 1 所示,坐标系的原点 P 和 O 分别位于动平台和静平台的几何中心,轴 z 和 Z 分别垂直于动、静平台向上,轴 x、y 与 X、Y 分 别平行和垂直于上、下平台的边 P2P3 与 B2B3。局部 定坐标系 Bixiyizi (i=1, 2, 3)的 xi 轴与 Bi 处转动副轴线 一致,zi 垂直于静平台 B1B2B3 向上,yi 轴同时垂直 于 xi 和 zi 轴。
一种三自由度并联动力头——A3头的运动学标定方法研究的开题报告

一种三自由度并联动力头——A3头的运动学标定方法研究的开题报告一、研究背景随着机器人技术的不断发展,各种型号和种类的机器人涌现出来,从工业机器人、服务机器人到特殊机器人等,都在不断的发展和更新。
机器人的执行器是机器人的核心部件之一,其性能直接关系到机器人的运动精度和静态特性。
而在机器人的执行器中,动力头是其核心部件之一。
A3动力头是一种常见的三自由度并联动力头,其通过输出力矩实现对机器人末端执行器的控制。
A3动力头的准确定位和定位精度直接影响到机器人的操作精度和性能,因此对其进行运动学标定具有重要意义。
二、研究内容本文将研究A3动力头的运动学标定方法,具体研究内容包括以下三个方面:1. A3动力头的运动学模型建立:通过研究A3动力头的结构和工作原理,建立其运动学模型,包括正运动学和逆运动学。
2. 运动学标定实验设计:本文将设计实验方案,利用指定位置和姿态的标定点,采用示教器手动控制A3动力头在空间中运动,记录各个关节的位置、姿态和输出力矩等数据。
3. 参数估计和误差分析:利用标定点采集的数据,利用最小二乘法对A3动力头的参数进行估计,并对估计结果进行误差分析。
三、研究意义运动学标定是机器人运动控制的基础,其对机器人的精度和性能有着重要影响。
本文将研究A3动力头的运动学标定方法,对于提升A3动力头的运动精度和定位精度,优化机器人操作性能,具有重要的应用价值。
开发和应用该方法还有望进一步推动我国机器人技术的发展及国际竞争力的提升。
四、研究方法和步骤本文将采用实验方法和数学分析方法,在建立A3动力头运动学模型的基础上,设计运动学标定实验并记录数据,利用最小二乘法对参数进行估计,并对估计结果进行误差分析。
具体步骤如下:1. A3动力头的运动学模型建立。
2. 设计A3动力头运动学标定实验,并采集数据。
3. 利用最小二乘法对A3动力头的参数进行估计。
4. 对估计结果进行误差分析并进行优化。
5. 编制研究报告。
三自由度并联机床动力学响应研究
9&:!! 9&;:"#!$
}~VH`IJKxy!
$)%! µ&$
!-'ÚÛÜ7Ä$% U«78$%Ô' ÝÞ)"%&"""$-Ô'7Ä&$ UV78$%Üß) (""!("
67>?M4ÂÅ9^Â'Æ-S²_`0(H`ÂKL?Æ892ªì * ªE01:fÇ+:4?vH`ÂÂD)*fg+,mÇ+ NZXOX PHT3A c?21W :4?ÂmfgKL?f?ÂÍÅ9 $" m[ z g ÅáâãÂ[ º >?ì*Â-[ Æ(èD2ª.Ë/faÐ ÑÂÅ9KL?/2ª?ÆhK50$/12c36-k$Dç42ª5iu U?£ ( z£ ' m[ ÂDÆ-S12×·61z0$/1712ÂÆ -SD_8Å9+ >??pH`Â9:;<(èS8ÂKL?=?ÂÆ hKç4çQ62ª5iõ.61/;<(è¡Dh§ª8Z4.Ë >mÆ2ª2 x>ÂÅ9M4^ø?Þ+x 89:H`Âmf/2ª= ;<=>(KL!%&KM!!$)))%?@ABN
1-0W0@0*+,-&/>E/*5.,W0@L&/@0&61-+00>=TS*+*))0)%*,-./01&&) *+ZM:E! 'MN+K4?LH2@$
!!-X1WHH=HIJ?1W72417=72U <=?16T417=<2@42??T42@'ZHT6W VW427,2D646E6?HIN?THDB71?<2@42??T42@' F
三自由度Delta并联机械手运动学分析及轨迹规划

第32卷第1期青岛大学学报(工程技术版)Vol.32 N o.12 0 1 7 年 2 月JOURNAL OF QINGDAO UNIVERSITY (E&T) Feb. 2 0 17文章编号:1006 - 9798(2017)01 - 0063 - 06; DOI:10. 13306/j. 1006 - 9798. 2017.01.012三自由度Delta并联机械手运动学分析及轨迹规划王娜,王冬青,赵智勇(青岛大学自动化与电气工程学院,山东青岛266071)摘要:针对自动化生产流水线普遍存在的分拣、抓取及包装等大量的重复性工作的问题,本文对三自由度Delta并联机械手进行了机械结构的分析,建立了其正逆运动学方程,推导出运动学正反解公式,进行轨迹规划,并采用M a t l a b编程求解Delta机械手的正解方程组。
同时,通过分析动平台与静平台之间的矢量关系,结合几何原理得出每个点在静坐标系中的坐标,建立了逆运动学方程组,进一步推导出了位置反解。
在反解的基础上,运用矢量关系列写正运动学方程组,结合Matlab得出了正解。
采用三次多项式插值方法对Delta机器人进行关节空间轨迹规划,并结合MatlabRobotics T o o l仿真工具箱对3个关节的角度、速度、加速度随时间的变化进行仿真分析。
仿真结果表明,正解与反解的计算结果完全对应,证明位置正解与位置反解的推导过程完全正确;关节1角度值与时间呈现正相关,关节2与关节3角度值与时间呈现负相关,验证了反解是正确的。
该规划方法对证明Delta机械手的关节空间轨迹规划是有效的。
关键词:Delta并联机械手;正逆运动学方程;关节空间;轨迹规划中图分类号:TP241.3文献标识码:A目前,Delta并联机械手是食品行业中应用最广泛和最成功的并联机械手之一。
各类行业中的自动化生产流 水线普遍存在分拣、抓取以及包装等大量的重复性工作,这些工作如果全部由人工完成,不仅劳动强度大,而且不 可避免地会造成不同程度的污染。
基于Adams的3自由度并联机构运动学分析
2 0 1 3 年 5 月
黑
龙
江
大 学
工
程
学
报
Vo 1 . 4 。 NO . 2
Ma y, 2 01 3
J o u r n a l o f En g i n e e r i n g o f He i l o n g j i a n g Un i v e r s i t y
c r e a t e d t h r o u g h t h e d a t u m c o o r d i n a t e s y s t e m a n d t h e mo t i o n v e c t o r e q u a t i o n . An d t h e a n a l y t i c a l s o l u t i o n o f t h e i n v e r s e s o l u t i o n wa s c a l c u l a t e d o n u s i n g t h e a n a l y t i c a l me t h o d . F i n a l l y t h r o u g h Ad a ms v i r t u a l p r o t o t y p i n g we g o o n t h e s t r u c t u r e o f t h e s i mu l a t i o n a n d d a t a a n a l y s i s .An d we g e t t h e p o s i t i o n d a t a o f t h e u n i o n l e v e r ,t h e mo v i n g p l a t f o r m a n d v e r i f y t h e r a t i o n a l i t y .
并联三自由度运动平台动力学分析

式中: Fz (t ) 为三个电动缸在 a,b,c 三点对动平台作 用力在质心的合力; M1(t ) 为绕 x 轴的转矩; M 2 (t) 为
绕 y 轴的转矩。由此角加速度 和 也就得到了。 根据并联三自由度运动平台系统的机械结构以及技
术指标要求: 三根电动缸总体承受载荷 W=1000kg。
2 动力学分析 由于运动平台的高度非线性和时变性,以及多体系 统的约束条件等都给计算带来巨大困难。利用广义坐标, 对动力学普遍方程进行变换,可以得到与自由度数目相 同的一组独立运动微分方程,从而使方程更简洁,便于 计算。设机构系统广义坐标 qi(t)(i=1,2,3),即为三自由度 运动仿真模拟平台的动平台质心位置的垂直位移 z 和整
基金项目:辽宁省教育厅科研项目(201114126)
1 运动平台自由度的计算 并联三自由度运动平台,其结构简图如图 1 所示。 该机构上下平台支点连接起来后是两个全等的等边三角 形 abc 和 ABC,三条边的长度均为 600mm, 上、下平台 之间用 3 根可伸缩的量程为 400mm 的电动缸相联,即
Dynamic Analysis of a 3-DOF Parallel Platform
FU Jing-shun1,LANG Xiao-hui1,ZHANG Hong2 (1.Shenyang University of Technology,Shenyang 110870; 2.Shenyang Equipment Manufacturing School, Shenyang 110026)
动 平 台 可 以 由 a,b,c 三 点 空 间 坐 标
,
和
完全确定,由于三角形 abc
为等边三角形,且三边长度不变,即 Lab=Lbc=Lca,可列 出三个约束方程:
三自由度并联机床驱动分支动力学分析
软 件 中的示 意 图 。
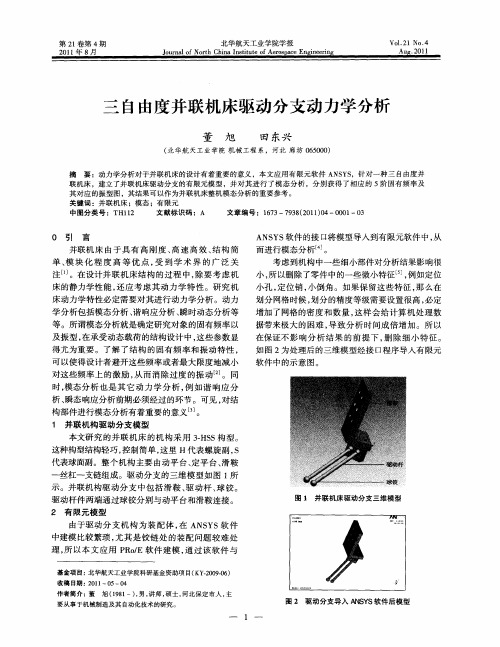
本文研究 的并 联机床 的机构采用 3H S构型。 .S 这种构型结构轻巧 , 控制简单 , 这里 H代表螺旋副 , s 代表球面副。整个机构主要 由动平 台、 定平 台、 滑鞍
—
丝杠 一支链 组成 。驱 动 分支 的三 维 模 型如 图 1 所
基金项 目: 华航天工业学 院科研基金资助项 目( Y 2 0 —6 北 K . 90 ) 0
收稿 日期 : 0 1 5—0 2 1 一O 4
作者简介 : 董
旭 (9 1 , , 18 一) 男 讲师 , 士, 硕 河北保定 市人 , 主
要从事于机械制造及其 自动化技术的研 究。
一
图 2 驱 动分 支 导 入 A S S软 件 后 模 型 NY
床的静力学性能 , 还应考虑其动力学特性。研究机 床动力学特性必定需要对其进行动力学分析 。动力 学分 析包 括模 态 分析 、 响应 分析 、 时动态 分 析等 谐 瞬
等 。所谓 模 态分 析就 是确 定研 究对 象 的 固有 频率 以
及振型 , 在承受动态载荷的结构设计 中, 这些参数显 得尤 为重 要 。 了解 了 结构 的 固有 频 率 和 振 动 特性 , 可以使得设计者避开这些频率或者最大限度地减小 对这 些频 率 上 的激 励 , 而 消 除过 度 的振 动 _ 。同 从 2 ]
考虑 到机构 中一些 细小部 件对 分析 结果 影 响很
小 , 以删 除 了零 件 中的一些微 小特 征 , 所 ]例如 定 位 小孔 , 位 销 , 倒 角 。如果 保 留这些 特 征 , 么在 定 小 那 划分 网格 时候 , 划分 的精 度等 级需要 设 置很高 , 定 必 增加了网格的密度和数量 , 这样会 给计算机处理数 据带来极 大 的 困难 , 导致 分 析 时 间 成倍 增 加 。所 以
一种三自由度并联机构的运动学分析
龙源期刊网
一种三自由度并联机构的运动学分析
作者:刘锟泽
来源:《科技资讯》2013年第05期
摘要:本文设计了一种三自由度混连机构,介绍了该机构的组成、计算了该机构的自由度,推导了并联部分的运动学正反解求解公式。
给出了具体的算例进行验证,结果对该机器人机构的设计控制等有重要的指导意义。
关键词:三自由度正反解并联机构
中途分类号:TG156 文献标识码:A 文章编号:1672-3791(2013)02(b)-0128-01
并联机构相对于串联机构具有刚度高、陈承载能力大、运动精度高、动态特性好等特点。
但并联机构的缺点也同样明显:位置正解运算复杂、工作空间小、难以实现大倾角加工以及运动特性和力特性的非线性关系、机床标定困难等。
因此混连机构的研究成为当下研究的热门课题。
混联结构机床是机床技术、并联机器人技术、现代伺服驱动技术和数控技术相结合而产生的一种新型自动化加工设备。
1 结构及其自由度
2 运动学正反解
3 算例
4 结语
本文以一种三自由度混连机构为研究对象,研究了该机构的自由度,提出了该机构的正反解计算公式,给出了具体算例,结果符合要求,计算简单,效率高。
参考文献
[1] 熊有伦.机器人技术基础[M].华中科技大学出版社,1996:1-92.
[2] 黄真,孔令富,方跃法.并联机器人机构学理论及控制[M].机械工业出版社,1997,12。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
3自由度并联机床的运动学和动力学研究
摘要:中国东北大学已经研制出一种用于钢坯研磨的新型3自由度并联机床。
它具有结构简单,刚度大的优点,更高的力量重量比,较大的工作空间,简单的运动学方程,没有运动的奇异位姿。
在使用相应刀具情况下该机器人可用于磨削,研磨,抛光等加工过程。
在本文中,介绍了简单的机器人的结构和自由度,运动学和工作空间,精度分析,静态和动态的分析及其相关参数。
关键词:并联机床;运动学;动力学;3自由度
1.前言
与传统机床相比,并联机床具有更高的精度,高刚度的优点,和更高的刚度质量比,所以近些年它得到了行业和机构大量的研究和评估。
由美国Giddings & Lewis公司研制的“六足虫”并联机床被认为是21世纪机床领域中的革命性理念。
然而这个Stewart平台存在运动耦合的缺点,并且具有复杂的运动学和构件要求十分严格。
这类少于六自由度并联机床在行业和机构也因此受到越来越多的关注。
意大利Comau研制出了一种命名为Tricept的四条腿的的三自由度并联机床。
东北大学已经开发出了一种新型三自由度的三腿平行磨削机床(图1)。
与“六足虫”并联机床相比,此三腿平行磨削并联机床具有以下优点:(1)结构简单且具有更大工作空间;(2)动力学方程简单便于控制操作;(3)在工作空间没有运动耦合状态。
图1
2.并联机床
2.1 3自由度系统的布局
该三自由度并联机构由一个移动平台,基础平台,一个平行的联动和三条腿的连接两个平台。
中间腿支链控制的移动平台的三个自由,如图2所示。
移动平台的转换是由平行连杆机构控制。
图2
2.2 运动学和工作空间
移动平台平行于基础平台,一个坐标系统(O- X,Y,Z)选择如图2所示,这种机制的逆向运动学正解方程可以表示为:
123l l l ===其中w=a-b
,2m = ,n=w/2 ,a 和分别表示基础平台的两侧的长度和等边三角形状的移动平台的长度。
该机构的位置正解方程可表示为:
2222
222132X l l w Y w Z =
-+=
=
从公式1和2可知系统在整个工作空间无奇异位姿和运动耦合。
其工作空间的形状如图3所示:它是一个三角曲面的金字塔。
其最大断面和深度均大于正常工作情况的数值。
这对于如磨削、抛光、焊接等加工形式都是非常适合的。
图3
3.控制系统
研磨操作应进行连续路径控制,
控制连续路径符合雅可比矩阵之间的
关系。
p V (动平台的速度)和l V (腿的延伸率)可以表示为p l V JV = 其中:312
1[
],[]T
T
p dl dl dl dX dY dZ V V dt
dt
dt dt
dt
dt
== 该雅克比矩阵计算如下:
3
1
222222222222[
]l l J w
w
-=
如果P ∆和 θ∆分别代表每分钟位置的变化和动平台的旋转角度,并且K 描述角度对三条腿的线位移,如下方程可以确立:
1kJ P θ∆=∆
根据上述所提到的,连续的路径控制单元的设计已经完成。
三条腿的控制是用C 语言编制的软件程序来实现的。
它具有良好的适应性和可移植性。
机器人示意图如图4所示。
图
4
4. 静力学和动力学分析 4.1 静力学
假设三脚并联机床载荷(如磨削载荷)矩阵是F ,驱动臂力矩阵是1F (图5),则有:
[]X
Y
Z F F F F =和11
2
3[]F F F F =
且根据虚位移理论,正解矩阵为:1T F J F =-,静力学逆解为11()T F J F -=-从上面的静力学分析也可以看出转矩是由平动机构承担的。
此外切削力是由三个环节的拉力承担。
这个机制在力学结构上是合理的。
图5
4.2.动力学
根据朗格朗日方程,每条腿的轴驱动力i F 为:
(),1,2,3i i i i
d K K P
F i dt q q q ∂∂∂=
-+=∂∂∂ 其中K 是动能,P 的潜在能量,i q 是关节的广义坐标。
用于驱动腿如图6所示,忽略关节摩擦力和平移运动机理,可以得出以下的动力学
方程:
3
33
2
2
1111
()(2())()(()sin cos )i i P P P ci ci i ci i
ci ci ci i i ci i i i i m m m m F M X Y Z m l l l l m m l Mg mg l m m θθθθθ===--=+++++--+++∑∑∑
其中ci l 是固定端到质心的距离,m 是连杆i 的质量,m 是较低的联络线振荡环节i 的质量,M 是动平台质量,1θ是连杆i 和底平台夹角。
图6
5.结论
这种新型并联机床是非常方便实用。
由于机构的独特运动转换方式,其运动学是简单的,且无奇异位形和运动。
因此,该机构易于进行实时控制。
如果有其他的刀具,这个机器人还可以改装发展其他机床和机器人进行应用。