三自由度并联机械手动力学分析与控制
3自由度并联机器人的运动学与动力学分析_刘善增

第 45 卷第 8 期 2009 年 8 月
机械工程学报
JOURNAL OF MECHANICAL ENGINEERING
Vo l . 4 5 N o . 8 Aug. 2009
DOI:10.3901/JME.2009.08.011
3 自由度并联机器人的运动学与动力学分析*
刘善增 1, 2 余跃庆 1 佀国宁 1 杨建新 1 苏丽颖 1
(1. 北京工业大学机械工程与应用电子技术学院 北京 100124; 2. 中国矿业大学机电学院 徐州 221116)
1 3-RRS 并联机器人的运动学分析
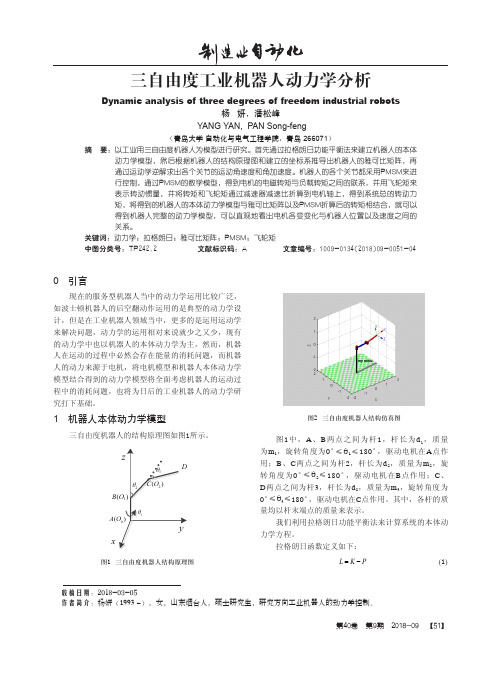
一种空间 3 自由度并联机器人的结构简图,如 图 1 所示。它由一个动平台 P1P2P3,三条支链 BiCiPi(i=1, 2, 3)和一个静平台(基座)B1B2B3 组成。其 中,动平台通过球面副(S 副)与各支链连接,静平台 通过转动副(R 副)与各支链连接,且 Bi 处转动副的 轴线与 Ci(i=1, 2, 3)处转动副的轴线对应平行。分别 建立与动平台固结的局部(动)坐标系 Pxyz 和系统 (固定)坐标系 OXYZ,如图 1 所示,坐标系的原点 P 和 O 分别位于动平台和静平台的几何中心,轴 z 和 Z 分别垂直于动、静平台向上,轴 x、y 与 X、Y 分 别平行和垂直于上、下平台的边 P2P3 与 B2B3。局部 定坐标系 Bixiyizi (i=1, 2, 3)的 xi 轴与 Bi 处转动副轴线 一致,zi 垂直于静平台 B1B2B3 向上,yi 轴同时垂直 于 xi 和 zi 轴。
3自由度的机械手控制器设计原理

3自由度的机械手控制器设计原理3自由度的机械手是指可以在三个方向上移动的机械手,通常是由三个关节组成的。
这样的机械手可以进行基本的平移和旋转运动,可以用于各种应用场景,如工业生产、医疗手术和科研实验等。
为了实现对3自由度机械手的精确控制,需要设计一个有效的控制器来实现对机械手的精准运动控制。
3自由度机械手的控制器设计原理主要包括以下几个方面:1.传感器系统设计:传感器系统是机械手控制器的基础,通过传感器系统可以获取机械手的位置、速度和力信息。
在设计3自由度机械手的控制器时,需要选择合适的传感器来获取机械手各个关节的位置信息,以实现对机械手的闭环控制。
常用的传感器包括编码器、惯性传感器和力传感器等。
2.运动控制算法设计:运动控制算法是机械手控制器的核心部分,通过运动控制算法可以实现对机械手的轨迹规划和动态控制。
在设计3自由度机械手的控制器时,通常采用PID控制算法或者模型预测控制算法来实现对机械手的动态控制。
PID控制算法通过调节比例、积分和微分参数来实现对机械手位置和速度的精确控制,而模型预测控制算法则通过对机械手的动态模型进行建模,并利用预测控制器来预测未来的行为,并实现对机械手的精确控制。
3.人机交互界面设计:为了方便用户对机械手进行操作和监控,需要设计一个友好的人机交互界面。
在设计3自由度机械手的控制器时,可以采用图形界面或者虚拟现实界面来实现对机械手的控制和监控。
通过人机交互界面,用户可以实时监控机械手的状态,并进行控制参数的设定和调整,以实现对机械手的精确控制。
总的来说,设计一个有效的3自由度机械手控制器需要综合考虑传感器系统设计、运动控制算法设计和人机交互界面设计等方面,通过合理的设计和实现,可以实现对机械手的精确控制,并满足不同应用场景的需求。
通过不断优化和改进,可以实现对机械手的更精准和高效的控制,为各种应用场景提供更好的解决方案。
三自由度Delta并联机械手运动学分析及轨迹规划

第32卷第1期青岛大学学报(工程技术版)Vol.32 N o.12 0 1 7 年 2 月JOURNAL OF QINGDAO UNIVERSITY (E&T) Feb. 2 0 17文章编号:1006 - 9798(2017)01 - 0063 - 06; DOI:10. 13306/j. 1006 - 9798. 2017.01.012三自由度Delta并联机械手运动学分析及轨迹规划王娜,王冬青,赵智勇(青岛大学自动化与电气工程学院,山东青岛266071)摘要:针对自动化生产流水线普遍存在的分拣、抓取及包装等大量的重复性工作的问题,本文对三自由度Delta并联机械手进行了机械结构的分析,建立了其正逆运动学方程,推导出运动学正反解公式,进行轨迹规划,并采用M a t l a b编程求解Delta机械手的正解方程组。
同时,通过分析动平台与静平台之间的矢量关系,结合几何原理得出每个点在静坐标系中的坐标,建立了逆运动学方程组,进一步推导出了位置反解。
在反解的基础上,运用矢量关系列写正运动学方程组,结合Matlab得出了正解。
采用三次多项式插值方法对Delta机器人进行关节空间轨迹规划,并结合MatlabRobotics T o o l仿真工具箱对3个关节的角度、速度、加速度随时间的变化进行仿真分析。
仿真结果表明,正解与反解的计算结果完全对应,证明位置正解与位置反解的推导过程完全正确;关节1角度值与时间呈现正相关,关节2与关节3角度值与时间呈现负相关,验证了反解是正确的。
该规划方法对证明Delta机械手的关节空间轨迹规划是有效的。
关键词:Delta并联机械手;正逆运动学方程;关节空间;轨迹规划中图分类号:TP241.3文献标识码:A目前,Delta并联机械手是食品行业中应用最广泛和最成功的并联机械手之一。
各类行业中的自动化生产流 水线普遍存在分拣、抓取以及包装等大量的重复性工作,这些工作如果全部由人工完成,不仅劳动强度大,而且不 可避免地会造成不同程度的污染。
三自由度工业机器人动力学分析
(18)
【下转第65页】 第40卷 第9期 2018-09 【53】
将式(11)代入式(10)中可得:
(12)
当Te>TL时,
dω dt
>
0 ,系统加速;
图3 机器人动力学控制原理图
当Te<TL时, dω < 0 ,系统减速; dt
当Te=TL时,系统以恒速运动,即稳态运动,在稳 态时,电动机的电磁转矩大小由电动机的负载转矩所 决定。
在实际的系统中,在电机与负载之间往往有减速 器,如图4所示。
图4 多轴传动系统图
在计算过程当中,我们通常将负载转矩折算到电机
转矩上。
首先,按照能量守恒,折算到电机轴上的负载功率
应等于工作机械的负载工率加上减速器中的损耗,即:
TL′ωM
= TLωL η
(13)
两种运动负载折算到电机轴上的转矩为:
(14)
式中,η<<1为1 传动效率,i
=
ωM ωL
为减速器减速比。
按照能量守恒:
1 2
J ωM2
=
1 2
J M ωM2
+
1 2
J LωL2
(15)
等效的转动惯量和飞轮矩分别为:
J
=
JM
+
JL
(ωM / ωL )2
=
JM
+
JL i2
(16)
GD2
=
GDM2
+
GDL2 i2
(17)
4 机器人动力学模型
机器人的动力学模型就是将机器人的本体模型与 雅可比矩阵和电机模型相结合,即由式(3)、式(9)、式 (12)、式(17)可得:
三自由度绳驱动并联机器人运动学分析
5 )完全分 离 的传 动 :用全 绳驱 动控 制器 ,所
有 的传 动 和 敏 感部 分 可 以放 在 离 终端 执 行 器 和工 作地带 很远 的地方 。可适应 危险 的工作环境 。
作 者 简i :乔 文 刚 (9 1 ), 男 ,副 教 授 ,硕 士 ,研 究 方 向为 机 电控 制 工程 与 液 压 技 术 。 t 16 一 [2] 第3卷 14 3 第2 期 2 1- ( ) 01 2上
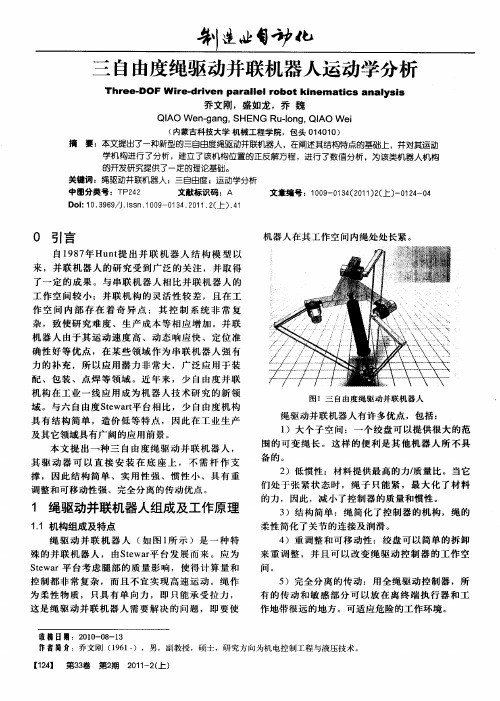
作 空 间 内部 存 在 着 奇 异 点 ;其 控 制 系 统 非 常 复 杂 ,致 使 研 究难 度 、 生产 成本 等 相 应增 加 。并联 机 器人 由于其 运 动速 度 高 、动 态 响 应快 、定 位 准
确性 好 等 优点 ,在某 些 领域 作 为 串联 机 器 人 强有
力 的补充 ,所 以应 用 潜 力 非常 大 ,广 泛 应 用于 装 配 、包 装 、点焊 等领 域 。近 年 来 , 少 自 由度并 联
7 l i )Oi 与 的夹 角 :x 8 2 绳 与Xi )0i : 的夹 角 9 3 绳 与Y 的夹 角 )0i :
和 气缸 与上 下 平 台的 连 接 ) 。由于 气 缸 的两 端 分
别 安装 在 两 平 台的 几何 中 心 ,所 以起 辅 助 支 撑 作
用 不参 与机 构 主 要 运动 。 该机 构 的 动 力 源 来 自安 装 在基 座 上 的伺 服 电机 ,每 个 电机 驱 动 一 组 摆 杆
、 l
1 动 作原理 . 2
三 自由 度绳 驱 动 并 联 机 器 人 共 计 九 个 关 节 ,
包 括 三个 转 动 关 节 ( 电机 与摆 杆 的 连 接 )和 有 即 六 个球 面 副关 节 ( 绳 与 摆 杆机 、动 平 台的 连 接 即
DELTA并联机器人运动学分析与控制系统研究共3篇

DELTA并联机器人运动学分析与控制系统研究共3篇DELTA并联机器人运动学分析与控制系统研究1DELTA并联机器人是一种特殊的平面机器人,其构建方式是有三个"手臂"连接到一个平台上,形成了一个三角形的平面结构。
它具备高速、高精度和高可靠的特性,因此在组装、分拣和包装等领域有着广泛的应用。
机器人的运动学分析是研究机器人在运动时各种运动参数、关节位姿、速度和加速度等因素的关系。
DELTA机器人因为它的三角形平面结构,运动学模型相比于其他机器人则非常复杂。
在这种结构中,每个关节的运动都会对另外两个关节产生影响,因为每个关节都是相互连接的。
因此,建立运动学模型需要使用到复杂的几何算法和数学方程式。
在控制系统中,我们需要用某种方式去实现机器人的轨迹规划以及运动控制。
对于DELTA机器人,高速度和高精度都是极其重要的考虑因素。
在轨迹规划方面,我们需要考虑运动学模型,同时结合应用中的实际需求来确定机器人工作范围和路径规划。
在运动控制方面,我们需要提供特定的学习算法和控制器,同时考虑实时性需求,以确保机器人的控制是稳定和可靠的。
总的来说,DELTA并联机器人运动学分析与控制系统是一个复杂的问题,需要对机器人的构造和应用进行全面的考虑。
要想达到最佳的控制效果,我们需要基于准确的运动学模型建立合适的控制系统,并且不断地优化和改善整个系统,从而使得机器人在应用中得到最大的利用价值。
DELTA并联机器人运动学分析与控制系统研究2DELTA并联机器人是一种非常灵活和高效的机器人系统,它可以用于许多不同的应用领域,包括工业自动化、医药制造、食品加工、航空航天等等。
但是,要充分发挥DELTA并联机器人的优势,需要对其进行正确的运动学分析和控制系统研究。
一、DELTA并联机器人的基本结构和工作原理DELTA并联机器人由三个运动自由度的臂和三个固定的连杆组成,臂和连杆的结构构成一个平行四边形,并通过球面铰链联接。
并联三自由度运动平台动力学分析

式中: Fz (t ) 为三个电动缸在 a,b,c 三点对动平台作 用力在质心的合力; M1(t ) 为绕 x 轴的转矩; M 2 (t) 为
绕 y 轴的转矩。由此角加速度 和 也就得到了。 根据并联三自由度运动平台系统的机械结构以及技
术指标要求: 三根电动缸总体承受载荷 W=1000kg。
2 动力学分析 由于运动平台的高度非线性和时变性,以及多体系 统的约束条件等都给计算带来巨大困难。利用广义坐标, 对动力学普遍方程进行变换,可以得到与自由度数目相 同的一组独立运动微分方程,从而使方程更简洁,便于 计算。设机构系统广义坐标 qi(t)(i=1,2,3),即为三自由度 运动仿真模拟平台的动平台质心位置的垂直位移 z 和整
基金项目:辽宁省教育厅科研项目(201114126)
1 运动平台自由度的计算 并联三自由度运动平台,其结构简图如图 1 所示。 该机构上下平台支点连接起来后是两个全等的等边三角 形 abc 和 ABC,三条边的长度均为 600mm, 上、下平台 之间用 3 根可伸缩的量程为 400mm 的电动缸相联,即
Dynamic Analysis of a 3-DOF Parallel Platform
FU Jing-shun1,LANG Xiao-hui1,ZHANG Hong2 (1.Shenyang University of Technology,Shenyang 110870; 2.Shenyang Equipment Manufacturing School, Shenyang 110026)
动 平 台 可 以 由 a,b,c 三 点 空 间 坐 标
,
和
完全确定,由于三角形 abc
为等边三角形,且三边长度不变,即 Lab=Lbc=Lca,可列 出三个约束方程:
三自由度并联机床驱动分支动力学分析
软 件 中的示 意 图 。
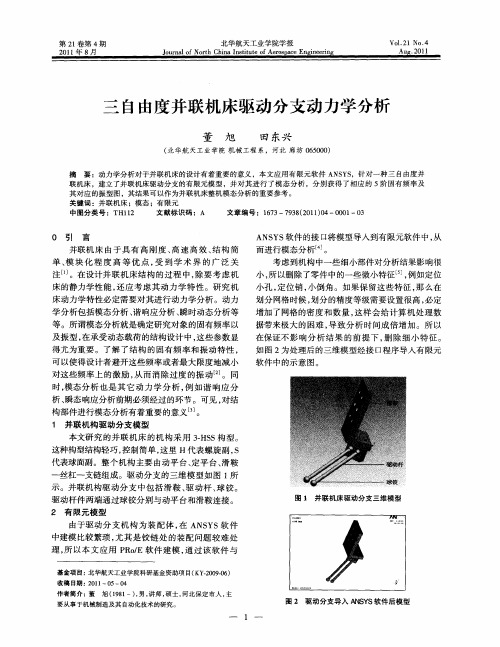
本文研究 的并 联机床 的机构采用 3H S构型。 .S 这种构型结构轻巧 , 控制简单 , 这里 H代表螺旋副 , s 代表球面副。整个机构主要 由动平 台、 定平 台、 滑鞍
—
丝杠 一支链 组成 。驱 动 分支 的三 维 模 型如 图 1 所
基金项 目: 华航天工业学 院科研基金资助项 目( Y 2 0 —6 北 K . 90 ) 0
收稿 日期 : 0 1 5—0 2 1 一O 4
作者简介 : 董
旭 (9 1 , , 18 一) 男 讲师 , 士, 硕 河北保定 市人 , 主
要从事于机械制造及其 自动化技术的研 究。
一
图 2 驱 动分 支 导 入 A S S软 件 后 模 型 NY
床的静力学性能 , 还应考虑其动力学特性。研究机 床动力学特性必定需要对其进行动力学分析 。动力 学分 析包 括模 态 分析 、 响应 分析 、 时动态 分 析等 谐 瞬
等 。所谓 模 态分 析就 是确 定研 究对 象 的 固有 频率 以
及振型 , 在承受动态载荷的结构设计 中, 这些参数显 得尤 为重 要 。 了解 了 结构 的 固有 频 率 和 振 动 特性 , 可以使得设计者避开这些频率或者最大限度地减小 对这 些频 率 上 的激 励 , 而 消 除过 度 的振 动 _ 。同 从 2 ]
考虑 到机构 中一些 细小部 件对 分析 结果 影 响很
小 , 以删 除 了零 件 中的一些微 小特 征 , 所 ]例如 定 位 小孔 , 位 销 , 倒 角 。如果 保 留这些 特 征 , 么在 定 小 那 划分 网格 时候 , 划分 的精 度等 级需要 设 置很高 , 定 必 增加了网格的密度和数量 , 这样会 给计算机处理数 据带来极 大 的 困难 , 导致 分 析 时 间 成倍 增 加 。所 以
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
r u n n i n g r e s u l t s s h o w t h t a t h e r e s p o n s e f o d e r o b o t i s i n l i n e w i t h e x p e c t .t h e cc a u r a c y s i h i g h e r t h n a c o m p u t e d t o r q u e c o n t r o l a n dt h e t r ck a i n g r e s u l t s s i s ti a s f a c t o r y .
PENG Z hi — we n,GAO Ho n g - l i ,W EN Ga ng,L I ANG Cha o
ห้องสมุดไป่ตู้
( S c h o o l o f Me c h a n i c a l E n g i n e e r i n g , S o u t h w e s t J i a o t o n g U n i v e r s i t y , S i c h u a n C h e n g d u 6 1 0 0 3 1 , C h i n a )
摘
要: 以三 自由度 D e l t a并联机械手作为研究对象, 在S i m u l i n k 环境 下建立基于虚功原理法得到 的并联机构 系统动力
学求解模 型,并在 S i m m e c h a n i c s中建立系统物理模型。在 系统动力学方程 的基础上设计 了基 于动力学的模糊解耦控制 器, 综合考虑 了机构的运动学和动力学特性。给 出平 台运动的期望轨迹 , 分别在 S i m u l i n k和 S i m m e c h a n i c s 中进行逆动力 学仿真分析 , 验证逆动力学方程的准确性 , 之后进行模糊解耦控制 S i m u l i n k / S i m me c h a n i c s 联合仿真分析 。 运行结果表 明, D e l t a 机械手的响应符合预期期望 , 精度 高于计算力矩控制 , 跟踪效果较好 。 关键 词: D e l t a机械手 ; S i mu l i n k ; S i mme c h a n i c s ; 计算力矩控 制; 模糊解耦控制
第 9期
2 0 1 7年 9月
机 械 设 计 与 制 造
Ma c hi n e r y De s i g n & Ma n u f a c t u r e 2 4 3
三 自由度 并联机械手动 力学分析 与控 制
彭 志文 , 高宏 力 , 文 刚, 梁 超
6 1 0 0 3 1 ) ( 西南交通大学 机械工程学 院, 四川 成都
中图分类号 : T H1 6 文献 标 识 码 : A 文章编号 : 1 0 0 1 — 3 9 9 7 ( 2 0 1 7 ) o 9 — 0 2 4 3 — 0 3
D y n a mi c s An a l y s i s a n d Co n t r o l o f 3 - DOF Pa r a l l e l Ma n i p u l a t o r
f u n c t i o n a n d t h e p r o p e r t i e s f o k i n e m a t i c s ,a f u =y d e c o u p l i n g c o n t r o l l e r W s a d e s i g n e d . A’ t a r g e t t r a j e c t o r y W s a g i v e n ,t h e i n v e r s e yn d a mi c s s i m u l ti a o n W s a c a r r i e d o u t b o t h i n S i mu l i n k a n d S i m me c h a n i c s t O p r o v e t h e c o r r e c t n e s s f o d y n mi a c mo d e l
A b s t r a c t : A 3 - D O F d e l t a r o b o t W C l 8 s t u d i e d . T h e S i m u l i n k w a s a p p l i e d t o b u i l d t h e d y n a mi c m o d e l b se a d o n p r i n c i p l e o f v i r t u a l w o r k . Ac c o r d i n g t O t h e s t r u c t u r e fm o a n i p u l a t o r , t h e S i m me c h a n i c s mo d e l W s a e s t a b l i s h e d . A s s o c i a t e d w i t h t h e yn d mi a c