惯性器件模型分析
MEMS陀螺误差模型标定实验与分析

MEMS陀螺误差模型标定实验与分析李勋;张欣;孙朔冬;鲍其莲【摘要】In this paper, two simplified linear and nonlinear models were established for MEMS gyroscopes static errors as well as a random model for random errors exiting in gyroscopes. Parameters of static models were estimated by least square method. The parameters of random error models were given by Allan variance analysis. The experiment results of two MEMS gyroscopes showed that the characteristic parameters are determined by given methods.%陀螺仪的误差模型与标定对于陀螺仪误差补偿非常关键.本论文针对陀螺仪的误差,分别建立了静态一阶与二阶简化模型以及随机误差模型,通过采用最小二乘法与Allan方差分析法进行了参数标定.最后,通过MEMS陀螺的实验结果获得了陀螺的特性参数,验证了模型及标定方法的有效性.【期刊名称】《电子设计工程》【年(卷),期】2017(025)017【总页数】4页(P164-167)【关键词】陀螺仪;误差模型;最小二乘法;Allan方差【作者】李勋;张欣;孙朔冬;鲍其莲【作者单位】深圳供电局有限公司广东深圳 518048;深圳供电局有限公司广东深圳 518048;上海交通大学电子信息与电气工程学院,上海200240;上海交通大学电子信息与电气工程学院,上海200240【正文语种】中文【中图分类】TN967.2微惯性器件是MEMS发展的重点,如硅微加速度计、硅微陀螺仪和硅微惯性测量组合等,硅微惯性器件相较于传统陀螺,具有轻便易于安装、使用寿命长、可靠性高、耐冲击、易于批量生产等特点,在汽车、无人机、等导航系统中具有广泛应用。
基于Kalman滤波的AUV两位置对准方法

高精度 的初始对准 。这种方法主要是解决静基座条件 下东 向 陀螺漂移的完全不可观测 ,以及 由此导致的方位 失准角精 度
不高的 问题 。一 般情 况下 ,基于 K l n滤波的静基座对 准 a ma
都是在载体完全静止 的情况下进行 的。此时 ,地 理坐标系下
系统的初始对准 。
』( ) = (0 l0 R ( 0) + 0) R A‘ ) ’ aM
从 而可得 :
‘
( 4 )
㈣
即£ 的相关时间1 比 的相关时间1 多 / ( 倍。 / / 0 )
由此可 得到 陀螺 的误差方程 :
基金项 I :黑龙江省教育厅基金资助项 目(14 3 0 i 1 15 19 )
t wo— o ii n i t g a e l n n a e n Ka ma l rn sp o o e n t i a e . ei e t l a i a i n e r rmo e i n ep i c p e o p sto e r t d a i me t s d o l n g b n f t i g i r p s d i sp p r Th ri v g to ro d l sbu l a d t rn i l f i e h n an i t h t wo- o ii n a i n n s a ay e Th y t ma c o e v b l y i mp o e y c n g n e sr p o r x The d g e f o e v b l y f r p sto lg me ti n l z d. e s se t bs r a ii s i r v d b ha i g t ta d wn ma i t h . e r e o bs r a ii o t
第六章(惯性仪器测试与数据分析)时间序列

x (h)
p k 1
ak
x
(h
k
)
w x
(h) (0)
x (m)
p k 1
ak
x
(m
k
)
研究表明,x (m) 按负指数函数衰减,理论上是无限延伸趋于0的,这种性质 称为拖尾性。
为了判断AR(p)过程的阶数,引入偏自相关系数函数定义
A)每只 i 电阻电压随时间是一条随机波动的曲线
xi (t), (i 1,2,..., N ) ——样本曲线(轨迹、现实) B)在同一特定 t j 时刻各个电阻的电压值各不相同
x1(t j ), x2 (t j ),..., xN (t j ) ——随机变量 X (t j )取值
5
一、随机过程的基本概念
自协方差函数 CX (n1, n2 ) Cov[X (n1), X (n2 )]
E{[X (n1) X (n1)][X (n2 ) X (n2 )]}
lim 1 N N
N[
i1
xi
(n1 )
X
(n1 )][xi
(n2
)
X
(n2
)]
自相关系数函数
X (n1, n2 )
CX (n1, n2 )
15
二、ARMA模型及其特点
按定义不好计算,研究发现X (k) 恰好与k阶Y-W方程的解系数 kk 完全相同
1
x (1)
...
P(X 0) 0.5
•••
P(X 1) 0.5
E( X ) 0 0.5 1 0.5 0.5
D( X ) (0 0.5)2 0.5 (1 0.5)2 0.5 0.25
基于主成分分析法的惯性器件寿命预测

P I :i ( J) t 时刻 , 在 t条件 下 的概 率 密 度 函 ,
数。
2 2 模 型 的 建 立 .
因 此该 模 型减 少 了有 用 信 息 的使 用 ; 目前 所 使 且
用 单 维 数据 的选 取 主 要 依 靠 专 家 评 判 , 不 同 的 所
P Y ) 描 述 。模 型 中所 用 符 号 如 下 : ( 来
t:
,
当前 监 测 时 刻 ;
值, 因此 , 可 避 免 地 存 在 主 观 误 差 。 基 于 随 不 机 滤 波 理 论 的 剩 余 寿 命 预 测 方 法 不 需 要 设 定 阈 值, 因此 提 供 了 1个 很好 的 寿命 预测 途 径 ¨ 。 基 于 随 机 滤 波 的 寿 命 预 测 将 设 备 的 剩 余 寿
d m e i n l b n e g n ei g m u t d m e son li f r ai n c n us ly b bti e i nso a , uti n i e rn li— i n i a n o m t a ual e o a n d.On y s m e o o l o f d t r ee t d y x e t t t i ,s me o he us f l i f r a in s aa a e s l ce b e p r ,ha s o f t e u n o m t i misn o s i g.I o d r t s l e h s n r e o o v t i
摘
要 : 基 于 随 机 滤 波 理 论 的 剩 余 寿命 预 测 模 型 中 , 使 用 的输 人 数 据 为 单 维 , 在 所 而工 程 实 践 中惯 性 器 件 有 多 维 监
MEMS惯性传感器技术的误差补偿及可靠性研究_李瑞养
84
数字技术 与应用
应用研究
表 1 失效信息 表 3 可靠性试验项目
表 2 失效机理与外界关系
模式,最大化系统共振振幅;二是提高检测模态的质量因 子QS ,一 般是通过真空手段来降低它的阻尼,提高质量因子。 美国佐治亚理 工学院在2008年采用一种使用自动模态匹配技术的音叉振动板陀 螺( M 2 - TFG ),此陀螺的驱动模态和检测模态间的频率差为0,从 而获得了很好的噪声水平和较小的零偏漂移 [2]。
4 MEMS惯性传感器发展趋势
近年来MEMS惯性传感器的性能迅速的提升,目前正由速率级 向战术级精度迈进,MEMS惯性技术随着系统技术的进步和工艺水 平的提高不断发展;未来的发展趋势为:(1)MEMS惯性传感器将向 微型化、 高精度方向发展;(2)多轴MEMS惯性传感器成为趋势;(3) MEMS惯性传感器性能要求将侧重于误差漂移、 迟滞效应小;(4)多 MEMS惯性传感器片上集成化、 智能化成为新的发展方向。
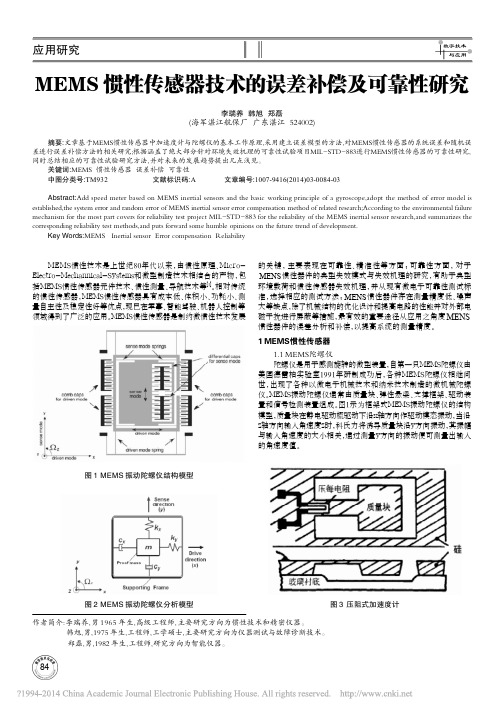
图 1 MEMS 振动陀螺仪结构模型
图 2 MEMS 振动陀螺仪分析模型 作者简介:李瑞养,男 1965 年生,高级工程师,主要研究方向为惯性技术和精密仪器。 韩旭,男,1975 年生,工程师,工学硕士,主要研究方向为仪器测试与故障诊断技术。 郑磊,男,1982 年生,工程师,研究方向为智能仪器。
图 3 压阻式加速度计
MENS 振动型陀螺的分析模型如2所示, kx 是驱动模态, k y 检 测振动模态弹性系数, cx 与 c y 是系统的阻尼。 MENS振动陀螺仪一
般通过交流电压应用于静电梳状驱动器来驱动它的振动。 因图2中 系统由于频率为 的电压驱动,在 x 轴方向作驱动模态振动,因此 方程可以表示为:
d 2 x d x c x k x x F 0 s in t d t 2 d t 当沿z轴方向有旋转角速度Ωs 运行,将会有沿 y 轴方向(垂于 x z 平面)的可理奥历力,使得质量块在 y 轴方向的振动,即测试 m
单质量块的单轴集成惯性测量器件的设计

1 Nain l yL bf rEl to i esrme t n eh oo y, r nvri f C i , . toa a o e rnc aue n d T c nlg No hU ies yo hn Ke c M a t t a Ke brtr f Isrme tt nS i c yL oaoyo ntu n ai c n e& Dy a c esrme tNot nvri f C i ) M ii r f a o e n mi M au e n ( r U ies yo n . ns yo h t h a t
摘 要 : 介绍了一种单质量块的单轴集成惯性测量器件的结构 , 提出一种可以利用一个敏感头同时测量某一方向加速度和
陀螺信 号的集成 测量结构形式 ; 同时建立 了单 轴集成测 量器 件的模 型 , 并运用 计算 机辅助 软件对其 进行 仿真 , 对惯性 测量器 件 的加 速度信号和陀螺信号的产生及仿真进行了阐述 ; 最后 , 了保证 器件有 高的成 品率 , 为 对测 量器件 的版 图进行 了优化设 计和修 改 ; 了保证高 的检测精度 , 为 还就测量器件的后续处理 电路进行 了研究 。
i r p e e td t o b i ua in I h n s e rs n e o y sm lt . nt ee d,f rt ep r o eo i hr t ffns e r d c s h r c s o o h u p s f g aeo iih d p o u t ,t ep o e s h
E] CC: 32 E 7 0
学眦
单 质 量 块 的单 轴 集 成 惯 性 测 量 器 件 的设 Jl ,
惯性导航基本原理PPT课件

21
2.对准要求 精确、快速。传感器精度高,同时对陀螺、加速
度计进行补偿
3.对准方法和过程 过程:分两步即粗对准和精对准 自主对准,不依赖外信息,受控式(依赖外信息) 方法:光的方法,天文的方法 粗对准:利用重力和地球自转角速率,直接估算
t
v i ( t ) v i ( t ) a i ( ) d 0 t0
t
r i ( t ) r i ( t ) v i ( u ) d u 0 t0
:视加速度,测量值;g :引力加速度。
12
平台式惯导系统组成
13
5捷联惯性导航工作原理
陀螺、加速度计固联在载体上。 测量载体相对于惯性系的旋转角速度、加速 度矢量(在载体坐标系中的值)。然后依据初始 时刻载体的位置、速度及姿态,计算出载体坐标 系相对于惯性系的姿态角、加速度,对加速度一 次(二次)积分得到速度(位置)。
14
Ri (t) Ri (t) b (t)
b
b
ib
33
33
33
f i(t) R i (t) f b(t)
b
31
31
0
z
y
b ib
z
0 x
y
x
0
其中
R i :b系至 i系的旋转变换矩阵; b
b :捷联陀螺测得的 b系相对于i系旋转角速度矢 ib
量在 b系中的值,、、 为其轴向分量。
2
0
x 1 f (t t )3
6
惯性导航与卫星导航组合定位精度分析及仿真

惯性导航与卫星导航组合定位精度分析及仿真周俊;王琳;徐永强;黄海;李枭楠【摘要】随着导航领域的逐渐发展,卫星导航的应用成为重要课题.阐述了惯性导航、卫星导航及其组合导航系统的基本原理和优缺点,对惯性导航系统的定位精度进行分析及仿真验证,并给出分析和验证的过程及结果.对惯性导航与卫星导航松组合模式的定位精度进行了分析和测试,并给出所使用的Kalman滤波器的详细参数及测试结果.测试结果表明,组合后的定位精度比单INS定位精度有大幅提高,且误差不随时间发散.【期刊名称】《无线电工程》【年(卷),期】2018(048)012【总页数】5页(P1086-1090)【关键词】卫星导航;惯性导航;组合导航;Kalman滤波【作者】周俊;王琳;徐永强;黄海;李枭楠【作者单位】陆军航空兵学院陆军航空兵研究所, 北京 101121;陆军航空兵学院陆军航空兵研究所, 北京 101121;陆军航空兵学院陆军航空兵研究所, 北京101121;陆军航空兵学院陆军航空兵研究所, 北京 101121;中国电子科技集团公司第五十四研究所, 河北石家庄 050081【正文语种】中文【中图分类】TP30 引言惯性导航系统(INS)是依据牛顿惯性原理,利用陀螺、加速度计等惯性敏感元件及初始信息来计算载体的姿态、速度和位置[1-2]。
惯性导航完全依靠载体自身设备独立自主地进行导航,是一种保密性好且不易受干扰的导航系统[3-4]。
但由于惯性器件存在测量误差,这种误差进入导航解算时会随时间累积,导致导航结果的误差随时间发散[5]。
全球卫星导航系统(GNSS)是一种星基无线电导航系统,能为全球陆、海、空、天的各类军民载体提供全天候、全天时和高精度的三维位置、速度和精密时间信息[6-8]。
但由于用户接收机在接收其导航定位信号时容易受到遮挡、折射和高动态等因素的干扰,导致信号质量不稳定,进而影响定位精度,甚至失锁[9-10]。
而INS与GNSS的组合能够有效地解决惯导误差随时间发散的问题,同时可以增强GNSS接收机对信号的捕获与跟踪性能,提高导航系统的稳定性[11-13]。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
26
惯性器件性能精度的主要标志
除了上面的漂移速率和零位偏值之外,分辨率也被看作陀 螺仪和加速度计的主要性能指标: 设地球是个半径R=6.370×106m的球体,过地心大圆 (地球表面)的弧长为1nmile,即1852m,圆心角的一角 秒对应大圆弧长为30.48m。对定位精度为300m的惯性系统 来说,陀螺仪的分辨率应为10〞左右,或5×10-5rad。同 样,加速度计的分辨率也可作为相似的说明,当完全由它 来考虑惯性系统的定位精度时,300m的定位精度要求加速 度计的分辨率约为:5×10-5g。
22
加速度计的性能指标
交叉耦合系数crosssensitivity: 交叉耦合系数cross-axis sensitivity:沿加速度计的 cross 输入轴及其垂直方向都有加速度作用时,加速度计的输 出中有一项与这两个加速度的乘积成比例,这个比例系 数称为交叉耦合系数。这种系数随着交叉加速度的方向 而变化。交叉耦合系数在模型方程中以Kio表示。
内容安排
典型误差模型 典型特征参数 误差项) (误差项)
陀螺仪 加速度计
统 计 分 析 特 性
1
第一节 1. 惯性器件的性能指标 1.1 陀螺仪的性能指标 1.2 加速度计的性能指标 1.3 惯性器件性能精度的主要标志
2
陀螺仪的性能指标
从惯性系统的要求来说,陀螺仪性能指标中首 先要考虑的是它的精度指标 精度指标,然后才是它的电 精度指标 电 气性能、机械性能、环境条件及寿命等; 气性能、机械性能、环境条件及寿命 当仪器的工作原理变化时,某些性能指标或参 数会有变动。
24
第一节 1. 惯性器件的性能指标 1.1 陀螺仪的性能指标 1.2 加速度计的性能指标 1.3 惯性器件性能精度的主要标志
25
惯性器件性能精度的主要标志
惯性级陀螺仪的随机漂移速率优于0.015°/h r,惯性级加速度计的零位偏值也应优于10-4 g 时,才能满足标准惯性系统要求的定位精度— —每小时定位误差不超过1nm。 从系统性能出发,陀螺仪的随机漂移率和加 速度计的零位偏值分别为它们的主要性能指标。
5
陀螺仪的性能指标
Maximum rate :陀螺仪所能测得的最大输入角速 率,可指导陀螺仪的应用环境。单位:(deg/h,deg/s) 零位偏值Bias :当输入角速率为零时,陀螺仪的输出量。 零位偏值 用规定时间内测得的输出平均值相应的等效输入角速率 表示。单位:(deg/h,deg/s)
6
陀螺仪的性能指标
误差模型的概念及原理
一 些 物 理 因 素
元件发热造成的温度梯度 形成干扰力 矩作用于惯 性器件
29
误差模型的概念及原理
表示惯性仪器误差与有关物理量之间关系的数学表 达式,称为惯性仪器的误差数学模型。
建立惯性仪器误差数学模型并设法在惯性系统中补 偿,是惯性技术领域中必须解决的一个重要课题。
30
误差模型的概念及原理
惯性器件误差模型的意义在于计算惯性器件的各误 差项,并进行合理的补偿,使得惯性器件的输出值更 接近于真实值。 惯性仪器种类繁多,其工作原理和误差模型也不尽 相同,但人们在长期工作中总结出了惯性仪器的较为 通用的误差模型。
31
误差模型的概念及原理
引起惯性仪器误差的原因主要可以归为以下三类: 由于惯性仪器本身结构的不尽完善引起 由于一些物理因素引起 由于运载器的线运动和角运动引起
32
误差模型的概念及原理
惯 性 仪 器 本 身 结 构 的 不 尽 完 善 结构的弹性形变 不等弹性以及工艺上的误差
33
支承的摩擦 输电装置的弹性约束 质量不平衡 形成干扰力 矩作用于惯 性器件
Maximum acceleration :加速度计所能测得的最大输 入加速度,可指导加速度计的应用环境。单位:(g) 零位偏值Bias :当没有比力输入时,加速度计的输出量。 零位偏值 在模型方程中以K0表示。单位:(g)
18
加速度计的性能指标
零偏稳定性Bias stability:当输入加速度为零时,衡量加速 零偏稳定性 : 度计输出量围绕其均值的离散程度。以规定时间内输出量的 标准偏差相应的等效输入加速度表示,也可称为零漂。单位: (mg) 零偏重复性Bias repeatability:当输入加速度为零时,在同 零偏重复性 : 样条件及规定时间间隔内,多次通电过程中,加速度计零偏 相对其均值的离散程度。以多次测试所得零偏的标准偏差表 示。单位:(mg)
19
加速度计的性能指标
标度因数Scale factor: 标度因数Scale factor:标度因数是加速度计输出量 的变化与施加的输入量变化的比值。加速度计的标度 因数由所选择的模型方程的系数(通常为K)表示。
20
加速度计的性能指标
标度因数非线性度scale nonlinearity: 标度因数非线性度scale factor nonlinearity:在输入 加速度范围内,加速度计输出量相对于最小二乘法拟合直 线的最大偏差值与最大输出量之比。单位:(%,ppm) 标度因数不对称度scale asymmetry: 标度因数不对称度scale factor asymmetry:在输入加速 度范围内,加速度计正、反方向输入角速率的标度因数差 值预期平均值之比。单位:(%,ppm)
12
IEEE Std 5 28-2001(R 28-2001 evision of I EEE Std 52 8-1994)
陀螺仪的性能指标
13
陀螺仪的性能指标
感系数g-sensitivity:表征机械陀螺与加速度有 感系数 : 关的指标,反映陀螺仪在加速度作用下的性能。此系 数在光学陀螺仪中一般不考虑。单位:(deg/h/g) 启动时间turn-on-time:陀螺仪在规定工作条件下,从 : 启动时间 加电开始至达到规定性能所需要的时间。单位:(s)
27
惯性器件性能精度的主要标志
习惯上按照C.S.Draper的意见:以漂移速率为地球转速 的千分之一为参考,如果陀螺漂移小于0.015°/h,可 以满足一般精度的惯导系统的需要。以此为界限,分为: 惯性级: <0.015°/h 战术级:0.1 °/h 速率级5页
第二节 2. 惯性器件的误差模型 2.1 误差模型的概念及原理 2.2 陀螺仪的误差模型 2.3 加速度计的误差模型 2.4 误差模型的说明
3
陀螺仪的性能指标
精度性能指标: 精度性能指标:阈值和分辨率;标度因数及误差;输 出非线性误差;零位输出;交叉耦合输出; g0漂移速率; g1漂移速率;g2漂移速率;随机漂移速率;与时间有关 的性能稳定性;与重复启动有关的性能稳定性; 电气性能指标:陀螺电动机电源的相数、电压、频率、 电气性能指标 电流和功率;信号器电源的电压、频率和标度因数;力 矩器的施矩电流、功率、阻抗和标度因数;温度控制电 源的电流和功率。
4
陀螺仪的性能指标
机械性能指标:测量范围或转角自由度;陀螺动量矩; 机械性能指标 陀螺转子转动惯量;陀螺转子转速;时间常数;阻尼系数; 固有频率;启动、停转时间;安装对准要求。 环境条件: 环境条件:环境压力范围;环境温度范围;环境湿度范 围;振动;冲击;电磁环境;辐射环境。 寿命和可靠性: 寿命和可靠性:工作寿命;启动次数;平均故障间隔时 间等。
7
共105页
陀螺仪的性能指标
标度因数Scale factor: 标度因数Scale factor:陀螺仪输出量与输入角速率 的比值。用某一特定直线的斜率表示,该直线是根据 整个输入角速率的范围内测得的输入输出数据,用最 小二乘法拟合求得。
8
陀螺仪的性能指标
标度因数非线性度scale nonlinearity: 标度因数非线性度scale factor nonlinearity:在输入 角速度范围内,陀螺仪输出量相对于最小二乘法拟合直线 的最大偏差值与最大输出量之比。单位:(%,ppm) 标度因数不对称度scale asymmetry: 标度因数不对称度scale factor asymmetry:在输入角速 率范围内,陀螺仪正、反方向输入角速率的标度因数差值 预期平均值之比。单位:(%,ppm)
零偏稳定性Bias stability:当输入角速度为零时,衡 零偏稳定性 : 量陀螺仪输出量围绕其均值的离散程度。以规定时间 内输出量的标准偏差相应的等效输入角速度表示,也 可称为零漂。单位:(deg/h,deg/s) 零偏重复性Bias repeatability:当输入角速度为零时, 零偏重复性 : 在同样条件及规定时间间隔内,多次通电过程中,陀 螺仪零偏相对其均值的离散程度。以多次测试所得零 偏的标准偏差表示。单位:(deg/h,deg/s)
14
第一节 1. 惯性器件的性能指标 1.1 陀螺仪的性能指标 1.2 加速度计的性能指标 1.3 惯性器件性能精度的主要标志
15
加速度计的性能指标
对于加速度计,它的性能指标也可分为精度性能、电气参数、 机械参数、环境条件和寿命等,列出如下: 精度性能指标: 精度性能指标:阈值和分辨率;标度因数及误差;输出非线 性误差;零位输出;交叉耦合误差;随机误差与时间有关的 性能稳定性;与重复启动有关的性能稳定性。 电气性能指标: 电气性能指标:信号器电源的电压、频率和标度因数;力矩 器的施矩电流、功率、阻抗和标度因数;温度控制电源的电 流和功率。
21
加速度计的性能指标
二阶非线性系数: 二阶非线性系数:二阶非线性系数表示加速度计输出变 化与平行于输入基准轴的外加加速度的平方之间的比例 常数。在模型方程中,二阶非线性系数是以K2来表示。 三阶非线性系数: 三阶非线性系数:三阶非线性系数表示加速度计输出变 化与平行于输入基准轴的外加加速度三次方之间关系的 比例常数。在模型方程中,三阶非线性系数是以K3来表示。
9
陀螺仪的性能指标
10
陀螺仪的性能指标
随机游走系数random coefficient: 随机游走系数random walk coefficient:表征陀螺 仪中角速度输出白噪声大小的一项技术指标,它反映 的是陀螺仪输出的角速度积分(角度)随时间积累的不 确定性(角度随机误差),因此也可称为角随机游走。 单位:(deg/√h) 频带宽度bandwidth: 频带宽度bandwidth:陀螺仪频率特性测试中,规定 bandwidth 在测得的幅频特性中幅值降低3dB所对应的频率范围。 单位:(Hz)