RecurDyn成功案例-三一
基于RecurDyn的履带车辆动力学仿真_骆清国

车辆与动力技术 Vehicle & Power Technology
文章编号: 1009 - 4687(2011)04 - 0026 - 03
总第 124 期
基于 RecurDyn 的履带车辆动力学仿真
骆清国1, 司东亚1, 龚正波1, 赵新军2
( 1. 装甲兵工程学院机械工程系,北京 100072; 2. 北方发动机研究所,大同 037036)
车辆完成加速阶段,达到目标行驶速度后以稳 定车速匀速行驶. 匀速行驶阶段,左右两侧侧减速 器被动轴上测点转矩时域波形如图 5 所示.
为了进一步验证仿真模型的正确性,利用该模 型进行不同速度工况下的虚拟测试,得到相应的转 矩变化情况,并与相同工况下的实车道路试验结果 进行对比分析. 表 1 中给出了实车道路试验采用的 车速大小,在进行仿真时需将该速度转化为施加在 主动轮旋转副上的角速度.
比对,验证了模型的准确性,为下一步实现车辆动力-传动-行动装置联合仿真提供基础.
关键词: 履带车辆; RecurDyn; 多体动力学; 动态转矩
中图分类号: TP391. 9
文献标识码: A
Dynamic Simulation of a Tracked Vehicle Based on RecurDyn
LUO Qing-guo1 ,SI Dong-ya1 ,GONG Zheng-bo1 ,ZHAO Xin-jun2 ( 1. Department of Mechanical engineering of the Academy of Armored Force Engineering,Beijing 100072,China;
图 5 转矩时域波形图
可见,仿真结果比较理想,两侧转矩响应曲线 几乎是吻合的. 图中转矩的波动主要由履带和主动 轮轮齿的啮合造成,且由于仿真模型中,主动轮与 履带销之间是刚性连接,导致仿真输出的转矩幅值 比实测结果要大很多,在平均转矩较小时,会出现 转矩为负的情况. 计算得到左右两侧的平均转矩分 别为 318. 070 N·m、318. 894 N·m.
基于RecurDyn和Simulink的电传动车辆转矩控制策略
2 履带车辆样机模型构建
性提供给车辆行驶不同的法向力 、牵引力和滚动阻 力 。到目前为止 , 尽管车辆地面力学已经取得了很 大的进展 ,但描述地面与车辆相互关系的参量一般 还是采用公认的地面滚动阻力系数 f 、地面附着系 数 φ及地面转向阻力系数μ。本虚拟样机路面模型 充分利用一般的试验统计数据 , 针对仿真需要 , 在 RecurDyn/ HM 模块中定义了水平硬质地面 ,地面附 着系数 φ为 017 , 转向阻力系数 μ 为 0149 , 滚动阻 力系数 f 为 0105[4 ] 。整车动力学模型及路面模型 如图 2 所示 。
或者转速实现[2 ] 。由于车辆的直线行驶稳定性和 转向行驶性能完全依赖于控制策略的优劣 ,因此 ,准 确与实时的控制策略是车辆良好行驶的前提 。
图 1 电传动履带车辆结构框图 Fig. 1 Configuration of t he electric drive tracked vehicle
213 电动机及其控制系统模型 本文研究重点不是电动机驱动系统 , 从工程应
用的角度考虑 ,利用电动机驱动系统试验数据在控 制软件 Simulink 中建立 Look2Up Table 模块 , 利用 查表功能实现驱动系统的响应过程 , 因电动机转动 惯量与整车惯量相比较小 , 对整车动态性能的影响 可以忽略[5 ] 。仿真模型如图 3 所示 。
立的驱动电动机控制系统模型 ,构建了整车虚拟样机 ;分析和建立了转矩控制策略 ,对驾驶员信号进行了解析 ,利
用 Stateflow 建立了控制逻辑 ;在此虚拟样机基础上利用联合仿真的方法对转矩策略进行了仿真和样机试验 ,验证
了转矩控制策略方法的正确性 。
关键词 : 履带车辆 电传动 控制策略 RecurDyn Matlab/ Simulink
基于RecurDyn与Simulink的控制仿真平台在滚筒药柜上的应用

图 2 电气原理 图 1 . 2 滚 筒 药 柜 仿 真 平 台原 理
建立滚筒药柜仿真平台, 应首先建立三维模型 , 其 次加 入控
制模块 , 建立数学模型 , 进 而 对 整 合 的 系 统进 行 仿 真 和 调 试 。
首先通 过 R e c u r Dy n软 件 建 立 系 统 传 动 部 分 的 三 维 模 型 , 建立原件 、 约束 、 驱动 等 。然后通 过 R e c u r Dy n软件 自带 的控制 移 动 。 利 用 上 下 传 动 轴 承 载 药 品和 储 药 斗 的 重 量 , 轴 的两 端 安 设 定控制 的输入信号 , 以及 需 要 输 出 的 系 统 信 号 , 进而输 装有链 轮等传 动机构 , 带动储 药斗A T L A B软件调 用 的 M 文件 。在 MAT L A B 是 一根 通 轴 , 一端与传动链 轮、 电 动机 的 减 速 箱 连 接 。 动 力 驱 动 软件 中, 首先读 取 R e c u r D y n输 出的 M 文件 , 进 而输 出传 动 系 机构 由电动机 、 减速器 、 两级减速 的链 轮链条等 组成 。 平衡 杆及 统的R e c u r Dy n P l a n t B l o c k模块 , 然后 在此模块基 础上 , 加入相 平衡 杆导轨用于 保持储药斗 的水平及 平行状态 。 传动链 导轨用 应 的模块构 建控制系统 。最 后在 S i mu l i n k中运行 , 通过输 出的 于传 动链 的导 向, 保 证 传 动 链 条 的平 稳 运 行 以及 降 低 噪 声 。 张 各种数据 , 检验控制系 统的可靠性 。 紧 装置用于储 药斗传动 链条 的张紧 。此外 还有机架 、 底座 与壳
基于recurdyn的三叉杆滑移式万向联轴器疲劳寿命预测

0 引言
三叉杆滑移式万向联轴器是一种性能优越的传 动机构,它是对现有滚子型三叉杆万向联轴器在结 构上的一种改进。与滚子型三叉杆万向联轴器相比, 三叉杆滑移式万向联轴器具有传输能力强的明显优 势,应用范围更加广泛[1]。
+
R 2
(
1 cos β
-
1 )cos3φisin β
(1)
速度方程为
v
=
2R (
1 cos
β
-
1 ) ωicos
ω i tsin2ω i tsin
β
-
3R 2
(
1 cos β
-
1 ) ωisin3ωitsin β
-
ωisin ωitsin β [ R
-
R 2
(
1 cos β
-
1) -
R(
1 cos β
前期对三叉杆滑移式万向联轴器的研究多集中 在运动学 、 [2]22-23 动力学[3]和摩擦学方面 。 [4]62-88 滑杆作 为三叉杆滑移式万向联轴器的重要传递元件,其工 作过程中的接触应力与使用寿命息息相关 。 [4]36-40 通 过对三叉杆滑移式万向联轴器进行刚柔耦合动力学 仿真分析,得到实际工况下滑杆接触应力随输入轴 和输出轴夹角、转动频率、负载的变化情况,在此 基础上运用 RecurDyn 软件中的 Durability 模块对该联
关键词 三叉杆滑移式万向联轴器 滑杆 刚柔耦合 接触应力 疲劳寿命预测
RecurDyn电钜运动分析仿真
jigsaw本範例使用RecurDyn V7R1軟體的介面操作出處來自虎門科技公司廖偉志之線上學習資源網¾Part 1¾操作介面認識¾「merge」工具使用¾將多個單一零件,合併成單一零件¾旋轉 / 平移 / 固定接頭¾運動函數撰寫¾ Part 2¾複製接觸力所需接觸曲面¾進入「Body Edit Mode」編輯¾曲面接觸力定義¾Ext. Surface to Surface contact force ¾Part 3¾求解( Eigenvalue / Kinematic / Dynamic) ¾線性化分析¾動力學分析Part 11. 輸入模型名稱,中間不要有空格,第一字需要是英文字。
「中文命名不建議使用」輸入完後按OK( Parasolid , IGES , STEP , SAT , STL , etc2. 引入外部CAD檔案3.點選Icon Size ,改變Icon & Marker 大小後,按OK4. 點選上方功能表Tools → Merge Body,點選如圖的資料後按空白鍵取消打勾(有打勾,表示要合併的物體,所以要將沒有要合併之物體打勾取消)「Merge Body」可以將數個零件合併成單一零件,但使用上要注意合併後之質心位置和慣性特性是否與合併前相同,若有明顯差異則需要以人工方式填入正確的質量和慣性矩資料!!5. 接著點選B,點選要合併在該物體上3.出現該物體名稱1.2.6. 點選上方功能表Tools → Merge Body ,點選如圖的資料後按空白鍵(留下三個打勾之合併物體)7. 接著點選B ,點選要合併在該物體上3.出現該物體名稱1.2.8. 除了Ground 外,共有四個物件9. 點選視窗,View at Front10. 點選Joint → Translational 平移接頭(只有軸向一個單自由度)定義物體之間的拘束關係--「JOINT」依不同運動自由度,RECUDYN提供豐富的選擇定義彼此之間的關係,接頭也有人稱作「運動副」,但基於英文原意JOINT,簡稱「接頭」。
履带式设备及防脱轨技术探讨——以浙江三一装备有限公司带防脱轨装置和履带式设备为例

履带式设备及防脱轨技术探讨——以浙江三一装备有限公司带防脱轨装置和履带式设备为例摘要:随着近年来我国经济的不断发展,房地产、基建等建设领域快速发展,推动了市场对履带式起重机需求量的持续增加。
然而,实际工作过程中,设备在长时间工作容易出现履带松弛,并且由于工作路面不平整,履带下方容易悬空,从而在转弯过程中造成脱轨现象。
下面本文将从产品设备、技术方案、使用示例等方面介绍我司设计的防脱轨装置和履带式设备。
关键词:履带式设备、防脱轨前言随着近年来我国经济的不断发展,房地产、基建等建设领域快速发展,推动了市场对履带式起重机需求量的持续增加,同时,在近年来风电等领域的火热,进一步促进了行业需求的增加,使得我国履带式起重机销量在疫情期间也能保持高速增长。
然而目前中大吨位履带起重机缺乏限制履带脱轨的方式。
实际工作过程中,设备长时间工作容易出现履带松弛,在转弯过程中,由于履带齿与支重轮并未啮合,从而容易造成脱轨现象。
为了克服这些缺点,我司设计出一种履带防脱轨装置和履带式设备以缓解此技术问题。
履带防脱轨装置和履带式设备我司设计了一种履带防脱轨装置和履带式设备。
该产品包括限位器和滑道组件。
滑道组件用于与履带架连接,限位器插装在滑道组件的内腔中,且能够沿滑道组件的内腔上下滑动。
限位器的底部设置有卡槽,卡槽用于与履带板上的履带齿相配合,用于防止履带脱轨。
滑道组件包括上滑道和下滑道,限位器分别与上滑道和下滑道滑动连接。
上滑道用于限制限位器在履带式设备的行驶方向的移动;下滑道用于限制限位器在垂直于履带式设备的行驶方向的移动。
限位器上设置有减重孔。
限位器包括相互连接的滑动部和卡接部;滑动部与滑道组件滑动连接,卡槽设置在卡接部上,且卡槽的开口背向滑动部的方向延伸。
沿滑动部朝向卡接部方向,卡接部的宽度逐渐增加。
限位器包括两个第一立板、两个第二立板和封板。
两个第一立板平行设置,两个第二立板平行设置;第一立板与第二立板垂直;两个第二立板连接在两个第一立板之间,且一个第二立板连接在两个第一立板的一侧,另一个第二立板连接在两个第一立板的另一侧;第二立板的长度小于第一立板的长度,封板连接在第二立板的下端,且处于两个第一立板之间;两个第一立板、两个第二立板的侧向形成滑动部;两个第一立板的内侧和封板的下端面形成卡接部。
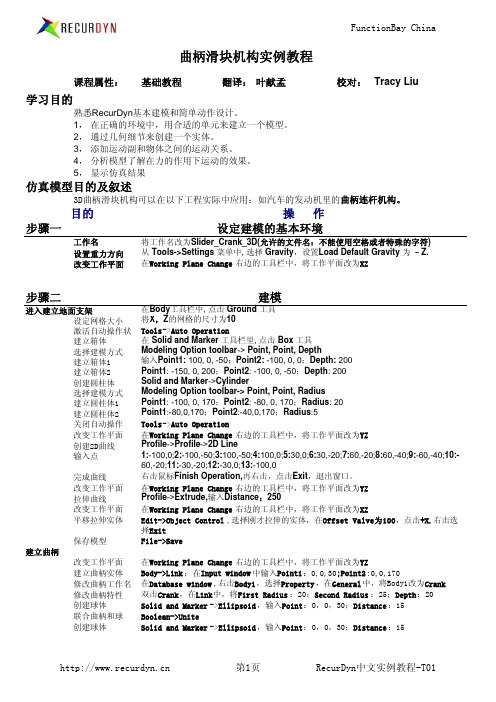
RecurDyn中文实例教程_T01_叶献孟
第1页
RecurDyn中文实例教程-T01
FunctionBay China
创建连杆 创建滑块
移动球体 修剪体 创建圆柱体
移动曲柄体 改变颜色 保存模型
选择Ellipsoid2 ,点击Object Control ,在Offset Value 中输入5.点击+X Boolean ->Subtract ,先选择Unite1 ,再选择Ellpsoid2
改变工作平面 在Working Plane Change 右边的工具栏中,将工作平面改为YZ
创建箱体
Body->Box ;在Modeling Option toolbar 中选择Point,Point,Depth .输入Point1 :0,-
60,-20;Point 2:0,60,-40. Depth :100
选择Point,Point,Radius,输入Point1 :10,0,170;Point2 :30,0,170;Radius: 20.右 击选择Exit 选择Object Control ,将Link1向-X方向移动70mm 右击Crank,选择Propeties ,选择Graphic Property .将颜色设置为灰色,点击OK File->Save
三一重工并购德国普茨迈斯特案例分析

企业并购与重组课程作业题目名称:三一重工并购德国普茨迈斯特案例分析XX:王文涵学号:1102391021专业名称:金融硕士指导老师:祚军目录一,企业介绍31.1 三一重工简介31.2 德国普茨迈斯特简介3二,并购过程32.1并购过程3三,并购动因分析43.1 三一重工方面43.1.1企业经营战略43.1.2国竞争环境恶化,海外竞争加剧53.2 德国普茨迈斯特方面63.2.1企业自身经营不善63.2.2 家族式企业后继无人7四,并购效果分析74.1拓宽销售渠道74.2降低产品成本,产品结构升级84.3 企业规模及研发能力升级8 .................................................................................................4.4 并购后财务分析9五,并购后可能遇到的问题95.1 产品成本与产品竞争力的矛盾问题95.2 企业文化融合问题10六,并购案引发的思考106.1 产业基金介入揭示的精细化并购趋势106.2 中联重科出局背后的政治因素11一,企业简介1.1 三一重工简介三一重工股份由三一集团投资创建于1994年,总部坐落于经济技术开发区,是三一集团的核心企业。
公司主要从事工程机械的研发、制造、销售,是中国最大、全球第六的工程机械制造商。
三一重工产品包括混凝土机械、挖掘机、汽车起重机、履带起重机、桩工机械、筑路机械等,其中三一混凝土机械、挖掘机、履带起重机、旋挖钻机已成为国第一品牌,混凝土输送泵车、混凝土输送泵和全液压压路机市场占有率居国首位,泵车产量居世界首位。
自公司成立以来,三一重工每年以50%以上的速度增长。
2011年,公司实现营业收入507.76亿元,同比增长49.54%;净利润86.49 亿元,较上年同期增长54.02% ;每股收益1.14元,同比增长54.02%。
2011年7月,三一重工以215.84亿美元的市值,首次入围FT全球500强,成为唯一上榜的中国机械企业。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
(起重机的整机动力学模型)
支撑与环轨变形协调等技术难题。
为解决超起配重小车与主机同步运动的技术难点,必须利用数字样机技术建立多体动力学模型、液压模型和控制模型,并通过联合仿真进行验证和优化分析。
而建立完整的多体动力学模型的关键是多履带系统的建模与仿真,只有履带系统真实的反映物理现象,才能对控制方案进行验证,并最终实现超起配重小车与主机的同步运动。
而回转支撑与环轨的变形协调影响回转支撑和环轨的受力分配,其结果对结构设计和液压系统设计有关键的影响。
常规的理论计算和整机
的算出其载荷分配,三一通过多体动力学软件建立整机柔性体模型,并借助超算中心的强大计算能力,分析。