幅相曲线
绘制下列传递函数的幅相曲线:
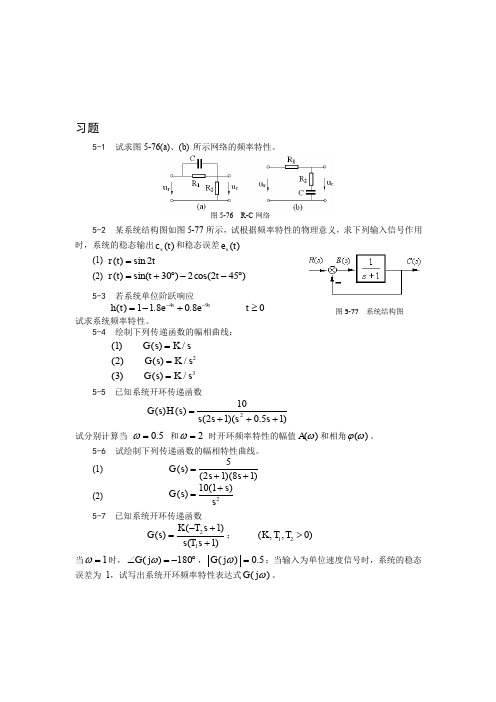
已知系统开环传递函数
试分别计算当 5-6 (1) (2) 5-7
0.5 和 2 时开环频率特性的幅值 A( ) 和相角 ( ) 。
5 ( 2 s 1)(8s 1) 10(1 s) G ( s) s2 G ( s)
试绘制下列传递函数的幅相特性曲线。
已知系统开环传递函数
试确定闭环系统临界稳定时的 K h 。 5-23 若单位反馈系统的开环传递函数
G ( s)
Ke 0.8s s 1
试确定使系统稳定的 K 的临界值。 5-24 设单位反馈系统的开环传递函数
G( s)
5s 2 e s ( s 1) 4
10 K1 ,当 r (t ) 10t 时,要 s(0.1s 1)( s 1)
题 5-17 图
5-18
已知系统开环传递函数
G(s)
10 s(0.2s 2 0.8s 1)
试根据奈奎斯特判据确定闭环系统的稳定性。 5-19 已知单位反馈系统的开环传递函数,试判断闭环系统的稳定性。
G ( s)
5-20 (1) (2) (3)
10 s2 s( s 1)( 1) 4
5-37
0. 4 s 1 0. 08s 1
计算校正后系统的相角裕度和幅值裕度,说明超前校正对系统动态性能的影响。 设单位反馈系统的开环传递函数
G ( s)
K s( s 1)
试设计一串联超前校正装置,使系统满足如下指标 (1) 在单位斜坡输入下的稳态误差 ess 1 15 ; (2) 截止频率ωc ≥7.5 rad/s ; (3) 相角裕度γ≥45°。 5-38 设单位反馈系统的开环传递函数
试确定闭环系统稳定的延迟时间τ的范围。 5-25 某单位反馈系统的开环传递函数为 G ( s )
4-2 第二节 幅相特性曲线
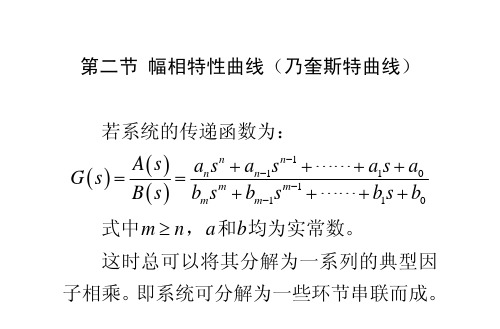
对于Ⅰ型系统,当w → 0时,幅相特性曲线
有一条平行于虚轴的渐进线,该直线与实轴
的交点坐标u ,可以用下式确定。
ua
=
u0
=
lim
w→0
Re
⎡⎣G
(
jw)⎤⎦
例 1: G (s) = K ⎡⎣S (TS +1)⎤⎦
G(
jw)
=
(
K
jw) (1 +
jTw)
( ) =
−
1
KT + T 2w2
−
j
w
K 1+ T 2w2
出幅角超前输入幅角(导前)。
6、二阶振荡环节
G(s)
=
S2
+
wn 2
2ξ wnS
+
wn 2
wn——无阻尼自然频率 ξ ——阻尼比
G
(
jw)
=
(
jw)2
+
wn 2
2ξ wn (
jw)
+
wn 2
=
1
⎛⎜1 − ⎝
w2 wn 2
⎞ ⎟
+
⎠
j
2ξ w
wn
⎡ = ⎢1
⎢ ⎣
⎛ ⎜1
−
⎝
w2 wn2
⎞2 ⎟ ⎠
(3)曲线的中间形状取决于分子的一阶、
二阶微分环节的个数及G ( jw)中各因子的系
数。 一般标准传递函数的典型幅相特性曲线
如下图。
而对于非标准的传递函数则只能按照基 本定义进行分析。
例 1:绘制G (s) = K 的幅相特性曲线。
TS −1
G( jw) =
自动控制原理 第5章 频率法_2-1

1 2
)
(5-28)
M (w )
0.2 0.5
1
0.9
0
Mr
wr
wn w c
w
振荡环节的幅频特性
2 2
1 Tw 1 2 2 2 1 T w 2
这是一个标准圆方程,其圆心坐标是 1 ,0 , 2 半径为 1 。且当ω 由 0 时, G( jw ) 由 0 90 , 2 说明惯性环节的频率特性在 G( jw ) 平面上是实轴下 方半个圆周。
20
1 T
和
(w ) 45
0
的交点为
工程上常用简便的作图法来得到L(w曲线,方法如下:
w
1 T
L(w ) 20 lg
1 T w
2
2
0 (dB)
即当频率很低时, L(w可用零分贝线近似; 低频渐近线
w
1 T
L(w ) 20 lg
1 T w
2
2
20 lg wT (dB)
当 w 10 时,20 lg G( j10) 20 lg 10 20(dB)
。
8
设 w'
10w
'
,则有
(5-36)
dB L(w )
60
20 lg w 20 lg 10w 20 20 lg w
可见,积分环节的对数幅频特 性是一条在w=1(弧度/秒)处 穿过零分贝线(w轴),斜率为 -20dB/dec的直线。 几何 意义 积分环节的相频特性是
(1) 幅相曲线 振荡环节的传递函数为: ( s) G
1 T w j 2Tw 1
2 2
自动控制原理常用名词解释
词汇第一章自动控制 ( Automatic Control) :是指在没有人直接参与的条件下,利用控制装置使被控对象的某些物理量(或状态)自动地按照预定的规律去运行。
开环控制 ( open loop control ):开环控制是最简单的一种控制方式。
它的特点是,按照控制信息传递的路径,控制量与被控制量之间只有前向通路而没有反馈通路。
也就是说,控制作用的传递路径不是闭合的,故称为开环。
闭环控制 ( closed loop control) :凡是将系统的输出量反送至输入端,对系统的控制作用产生直接的影响,都称为闭环控制系统或反馈控制 Feedback Control 系统。
这种自成循环的控制作用,使信息的传递路径形成了一个闭合的环路,故称为闭环。
复合控制 ( compound control ):是开、闭环控制相结合的一种控制方式。
被控对象:指需要给以控制的机器、设备或生产过程。
被控对象是控制系统的主体,例如火箭、锅炉、机器人、电冰箱等。
控制装置则指对被控对象起控制作用的设备总体,有测量变换部件、放大部件和执行装置。
被控量 (controlled variable ) :指被控对象中要求保持给定值、要按给定规律变化的物理量。
被控量又称输出量、输出信号。
给定值 (set value ) :是作用于自动控制系统的输入端并作为控制依据的物理量。
给定值又称输入信号、输入指令、参考输入。
干扰 (disturbance) :除给定值之外,凡能引起被控量变化的因素,都是干扰。
干扰又称扰动。
第二章数学模型 (mathematical model) :是描述系统内部物理量(或变量)之间动态关系的数学表达式。
传递函数 ( transfer function) :线性定常系统在零初始条件下,输出量的拉氏变换与输入量的拉氏变换之比,称为传递函数。
零点极点 (z ero and pole) :分子多项式的零点(分子多项式的根)称为传递函数的零点;分母多项式的零点(分母多项式的根)称为传递函数的极点。
概略幅相曲线例题
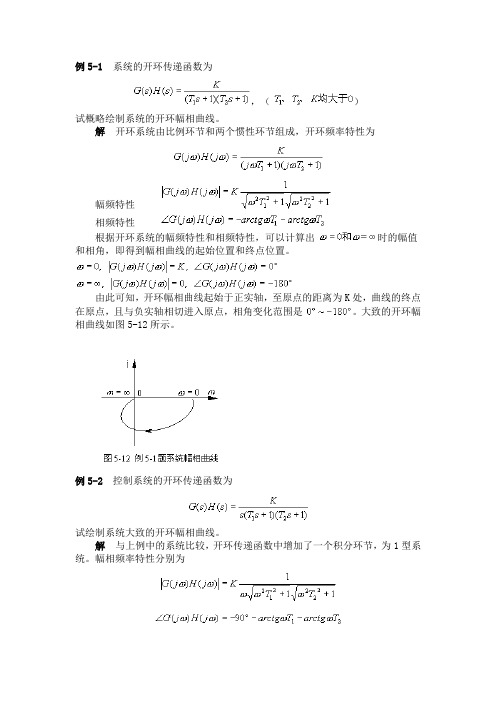
例5-1系统的开环传递函数为
,()
试概略绘制系统的开环幅相曲线。
解开环系统由比例环节和两个惯性环节组成,开环频率特性为
幅频特性
相频特性
根据开环系统的幅频特性和相频特性,可以计算出时的幅值和相角,即得到幅相曲线的起始位置和终点位置。
由此可知,开环幅相曲线起始于正实轴,至原点的距离为K处,曲线的终点
在原点,且与负实轴相切进入原点,相角变化范围是。
大致的开环幅相曲线如图5-12所示。
例5-2 控制系统的开环传递函数为
试绘制系统大致的开环幅相曲线。
解与上例中的系统比较,开环传递函数中增加了一个积分环节,为1型系统。
幅相频率特性分别为
可知,相角变化范围:,开环幅相曲线起始于负实轴无穷远处,终点在原点,且曲线与正虚轴相切进入原点。
将频率特性写成实部与虚部的形式
分别称和为开环系统的实频特性和虚频特性。
在起点,
求幅相曲线与实轴交点(该点对于分析系统的稳定性非常重要),可令
,得
将代入实部,可得
系统的开环幅相曲线如图5-13所示。
若在系统的开环传递函数中再增加一个积分环节,即
则当时,,开环幅相曲线起始
于负实轴无穷远处,当,开环幅相曲线与正实轴相切进入原点,如图5-14所示。
开环幅相曲线绘制

( jω ) 2 + j 2ζω nω + ω n 2
ωn 2
1) 极坐标图
Im
ωn 2
2) 伯德图
ω 2 2 ω = (1 − ( ) ) + j 2ζ ωn ωn
40dB/dec ω
L(ω)/dB
ω =ωn
ω →∞ 0 ω →0 Re 1 1 φ(ω)/(o) 180 90 0 -90 ω
27
10
0 10
0
10
1
10
2
Frequenc y (rad/s ec )
(ω ) = 20 log [1 + (ωT ) 2 ] ≈ 20 log ωT ( dB )
26
5.3. 二阶微分环节
G ( s) = T 2 s 2 + 2ζ Ts + 1 = G ( jω ) = s 2 + 2ζω n s + ωn 2
Im ω →∞ Re
ϕ +90 对数相频特性: (ω ) = +90 对数相频特性:
L(ω)/dB 20dB/dec 0 1 φ(ω)/(o) 90 10 ω
o
0 ω →0
0 -90
ω
24
思考:一阶微分环节与惯性环节的 bode图之间的关系?
5.2 一阶微分环节 G(s)=1+Ts G(jω)= 1+jωT Im ω →∞ 1) 极坐标图 2 2 ω →0 幅频特性: 幅频特性:A(ω ) = 1 + ω T 0 1 ϕ 相频特性: 相频特性: (ω ) = arctan ωT 2) 伯德图
18
取一次近似, 取一次近似,且令
19
20
21
4.2.1 常用于描述频率特性的几种曲线
G1 ( jw)G2 ( jw) G1 ( jw) e j1 (w ) . G2 ( jw) e j2 (w ) G1 G2 e j1 2
20lg G1G2 20lg G1 20lg G2
几个频率特性相乘,对数幅、相曲线相加
G1G2 1 2
两个频率特性互为倒数,幅、相特性反号,关于轴对称
线 性 分 度
L( w)
40 20
dB
w
0.1 1 10 100
w 2f
rad / s (弧度/秒)
线 性 分 度
( w )
900
度
w
0.1 1 10 100
rad / s (弧度/秒)
-900
对数频率特性优点 – 展宽频率范围 – 对于不含不稳定环节的系统,可由对数频率特性得到系 统的传函。 – 典型环节可用直线或折线近似表示
• 幅频特性是w 的偶函数 • 相频特性是w 的奇函数
w : 0 的曲线和w : 0的曲线关于实轴对称
• 性能分析(尤其是稳定性)时不需要绘制精确 的幅相特性曲线,只需绘制大致形状即可
对数分度:
lg 2 0.301
lg 5 0.699
lg 7 0.845
lg 8 3 lg 2 0.903
4.2. 典型环节频率特性
4.2.1 常用于描述频率特性的几种曲线
• 幅相频率特性曲线简称幅相曲线,又称极坐标图。在复平面 上,以角频率 w为自变量,把频率特性的幅频特性 ——模和 相频特性 ——相角同时在复平面上表示出来的图就是幅相曲 线。
• 开环对数频率特性图(对数坐标图或Bode图) 包括 开环对数幅频曲线 和 开环对数相频曲线 横坐标为w,以对数分度, 十倍频程,单位是rad/s 频率w每扩大10倍,横轴上变化一个单位长度。因此,对 于w坐标分度不均匀,对于lgw 则是均匀的。
自动控制原理
幅频特性和相频特性分别为
G( j )H ( j ) K
1
1
T12 2 1 T22 2 1
G(
j )H (
j )
arctgT1
arctgT2
arctg
(T1 T2 ) 1 T1T2 2
34
1 极坐标图
当 0 时,G( j)H ( j) K,G( j)H ( j) 00
当 1
时,G( j )H ( j ) K T1T2 ,G( j )H ( j ) 900
对数相频特性
ω
tg1
2ζ Tω 1 T2ω2
低频段,即ωT<<1时
Lω 20lg1=0 dB
——低频渐近线为一条0dB的水平直线。
22
Lω 20lg 1 T2ω2 2 2ζ Tω 2
高频段,即ωT>>1时
L( ) 20 lg( 2T 2 ) 40 lg(T )
当ω增加10倍
部和虚部,求出渐近线;
5. 最后在G(jω)H(jω)平面上绘制出系统开环频率特性的
极坐标图。
2
绘制系统开环频率特性的极坐标图,需把系统所包含 的各个环节对应频率的幅值相乘,相角相加。
例5.2 :求如下传递函数的极坐标图。
Gjω ejω T
1 jω T 解: G(jω)可写为:
Gjω e jω T 1
0.1
0.2 0.3
0.7 1
0.1
0.2 0.3 0.7
1
0.2
0.4 0.6 0.8 1
/n
2
4 6 8 10
24
可见:当频率接近 ω ωn 时,将产生谐振峰
值。阻尼比的大小决定了谐振峰值的幅值。
自动控制_05c开环频率特性曲线的绘制
K (1 T1T2 2 ) Q( ) (1 T12 2 )(1 T22 2 )
而 A( ) K
1
1 T
2 1
2
1 1 T
2 2 2
( ) 90 arctanT1 arctanT2 ,
当ω=0时 P(0) K (T1 T2 ),Q() , A(0) , (0) 90 表 明低频率段的渐近线是一条过实轴-K(T1+T2)点且平行于 虚轴的直线。 当ω→∞时 P() 0, Q() 0, A() 0, () 90 90 90 270 可见,此时高频段是以-270°作为极限角而卷入坐标原点 的。
设系统开环传递函数 G ( s ) 中含有V个积分环节,其相应 的频率特性为 m1 m2 2 2 ( 1 j ) [ ( j ) 2 k k ( j ) 1] i k K i 1 k 1 G ( j ) n1 n2 v ( j ) (1 jT j ) [Tl 2 ( j ) 2 2 lTl ( j ) 1]
图5-26 例5-2系统的幅相频率特性
在绘制系统的开环极坐标时,应注意曲线所具 有的一些特征。例如:当ω→0时低频段曲线从何 处出发?而当 ω→∞时的高频段特性曲线以什么姿 态卷向原点?曲线在ω值为多大时跨越实轴或虚轴? 跨越点的坐标值如何?等等。后两个问题我们已经 作过说明,下面讨论前两个问题。
K (1 jT1 )(1 jT2 ) G ( j ) (1 jT1 )(1 jT2 )(1 jT1 )(1 jT2 )
K [(1 T1T2 2 ) j (T1 T2 ) ] 2 2 2 2 (1 T1 )(1 T2 ) K (1 T1T2 2 ) K (T1 T2 ) j 2 2 2 2 (1 T1 )(1 T2 ) (1 T12 2 )(1 T22 2 )
自动控制原理 第五章第二节幅相频率特性(上)
(6) 振荡环节
G(s) =
s2
2 n
+
2
n
s
+
2 n
=
(
s
1 )2 + 2
s
=
2 n
+ 1 (s − 1 )(s − 2 )
1
n
n
G(jω)
=
1−
ω2 ωn2
+
j2ξ
ω ωn
G=
1
[1
−
2
2 n
]2
+ [2 2
n
]2
G
=
−arctan
1
−
ωn
2
2 n
G(j0) = 10 G(j) = 0 − 180
5.2 幅相频率特性(Nyquist图)(上)
⑺ 二阶复合微分
G(j ) = 1 − 2
G(s) = T2s2
+ j2
+
2
Ts
+
T=1
1=
n
(
s
n
)
2
+
2
s
n
+1
2 n
n
G=
[1
−
2
2 n
]2
+
[2
n
]2
2
G + = arctan
n 2
1
-
2 n
5.2 幅相频率特性(Nyquist图)(上)
0.707 ( 45)
= 0.707
( = 45) 0 0.707
( 45 90)
=0 ( = 90)
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
自动控制原理
本次课程作业(19)
5 — 4, 5, 6, 7 5 — 8 (选作)
自动控制原理
(第 19 讲)
§5. 线性系统的频域分析与校正
§5.1 §5.2 §5.3 §5.4 §5.5 §5.6 §5.7 §5.8 §5.9 频率特性的基本概念 幅相频率特性(Nyquist图) 对数频率特性(Bode图) 频域稳定判据 稳定裕度 利用开环频率特性分析系统的性能 闭环频率特性曲线的绘制 利用闭环频率特性分析系统的性能 频率法串联校正
X jY
A:
w A 1 6.2 0.402 G( jw A ) 0.0267 j 0
wB 6.2 2.49 B: G( jw ) 0 j 0.412 B
§5.2.2
开环系统的幅相频率特性 (5)
5 例9 G ( s ) ,画G(jw)曲线。 s( s 1)(2 s 1) 5 j 5(1 jw )(1 j 2w ) 解 G( jw ) jw (1 jw )(1 j 2w ) w (1 w 2 )(1 4w 2 )
⑻ G( jw ) e
j w
w2 w 1 2 j 2 wn wn
1
1 jw
1
w w j 2 2 wn wn
2
§5.3.2
开环系统的幅相频率特性 (1)
K ( τ i s 1)
i 1 n v m
§5.2.2 开环幅相特性曲线的绘制
K ( τ 1 s 1)( τ m s 1) G( s ) v s (T1 s 1)(Tn v s 1)
由j(w0):
G( jw0 ) 90
w 0 w n
w0 wn 10
1 3
K 2 由|G(w0)|: G(w0 ) 3 2 2
2 102 G( s) 1 s 2 2 10s 102 3
200 s 2 6.67s 100
§5.2
K ( s 1) G2 ( s ) 2 s (T1 s 1)(T2 s 1)(T3 s 1)
G2 ( j 0) 180
G2 G2 ( 180)
G2 G2 ( 180)
G2 ( j) 0 360
§5.2.2
开环系统的幅相频率特性 (4)
s3 s3 例8 G ( s ) ( s 0.2)(s 1)(s 5) (1 5s )(1 s )(1 0.2s )
G( j 0) 0 270
G G
G( j) 10
jw 3 (1 j 5w )(1 jw )(1 j 0.2w ) G( jw ) (1 25w 2 )(1 w 2 )(1 0.04w 2 ) w 4 (6.2 w 2 ) jw 3 (1 6.2w 2 ) (1 25w 2 )(1 w 2 )(1 0.04w 2 )
15 5(1 2w 2 ) j 2 2 (1 w )(1 4w ) w (1 w 2 )(1 4w 2 )
G( j 0) 90 G( j) 0 270
§5.2
⑻ 延迟环节
r (t ) (t )
幅相频率特性 ( Nyquist )(12)
G( s) e s
c( t ) k ( t ) ( t ) R( s ) 1
C ( s) G( s ) e s R( s )
C ( s) e s
G( jw ) e
1 jwT
⑷ G( jw ) 1 ( 1 jwT) ⑸ G( jw ) 1 jwT
e-j w
K
w2 w ⑹ G( jw ) 1 1 w 2 j 2 w n n
1 1 jw T
1 1 jw T
w2 w G ( j w ) 1 j 2 ⑺ 2 wn wn
1 w 2T2 G arctan wT
课程回顾(3)
不稳定惯性环节
G ( jw )
1 1 jwT 1 G 1 w 2T2
1 G( s) Ts 1
G arctan
⑸ 一阶复合微分
wT
-1
180 arctanwT
G( s ) Ts 1
K 1 j iw
m m
s v (Tj s 1)
j 1
G (w )
w
v
i 1 n v
1 jT jw
j 1
K 1 i2w 2
w v 1 T j2w 2
j 1
i 1 n v
j (w ) G( jw ) (1 j iw ) v 90 (1 jT jw )
v
起点
v0 K0 90v v 0
终点 0 90( n m )
§5.2.2
例7 G1 ( s )
开环系统的幅相频率特性 (3)
K s 2 (T1 s 1)(T2 s 1)
G1 G1
G1 ( j 0) 180 G1 ( j) 0 360
G ( jw ) 定义二: G ( jw ) G ( s ) s jw G ( jw ) 定义三: G( jw ) C ( jw ) R( jw )
课程回顾(2)
§5.2 幅相频率特性(Nyquist图)
G( jw ) K G ( jw ) jw
§5.2.1 典型环节的幅相特性曲线
⑴ 比例环节
⑵ 微分环节 ⑶ 积分环节 ⑷ 惯性环节
G( s ) K
G( s ) s
1 G( s) s
G( s)
1 G( jw ) jw
G K G 0 G w G 90 G 1 w G 90
1 Ts 1
G
1
1 G ( jw ) 1 jw T
G( jw ) 1 jwT
G 1 w 2T 2
G arctan wT
180 arctan wT
§5.2
幅相频率特性 ( Nyquist )(6)
§5.2.1 典型环节的幅相特性曲线
2 2 1 wn wn ⑹ 振荡环节 G( s ) 2 2 s s s 2wn s w n ( ) 2 2 1 ( s 1 )(s 2 ) wn wn 1 G( j 0) 10 G ( jw ) 2 w w G( j ) 0 180 1 2 j 2 wn wn
G ( j )
0 180 0 270 0 360 0 450
G( j 0) G ( jw ) K K 0 0 (1 jwT1 )(1 jwT1 ) K I jw (1 jwT1 )(1 jwT1 ) 90 K II ( jw )2 (1 jwT )(1 jwT ) 180 1 1 K III ( jw )3 (1 jwT )(1 jwT ) 270 1 1
jw
G 1
G w
§5.2
⑴ G( jw ) K ⑵ G ( jw ) jw ⑶ G( jw ) 1 jw
幅相频率特性 ( Nyquist )(13)
- 1 jwT
典型环节的幅相频率特性
jw
w2 w 1 2 j 2 wn wn
1
w2 w 1 2 j 2 wn wn
G 1 [1
d G 0 dw
w 2 w 2 ] [ 2 ] 2 wn wn
d w2 2 w 2 [1 ] [ 2 ] 0 2 dw wn wn
w2 w w 2 2[1 2 ][2( 2 ) ] 2 [ 2 ]( ) 0 wn wn wn wn 4w w2 2 [ 1 2 ] 0 2 2 wn wn
w 2 1 2 2 wn
2
例4:当 0.3, wn 1 ,时
wr 1 1 2 0.32 0.9055
Mr 1 2 0.3 1 0.3
2
1.832
§5.2
谐振频率 谐振峰值 M r
幅相频率特性 ( Nyquist )(8)
w r w n 1 2 2
自动控制原理
(第 19 讲)
§5.2 幅相频率特性
(Nyquist 曲线)
课程回顾(1)
频率特性 G(jw) 的定义
G ( jw ) 定义一:G( jw ) G( jw ) G( jw )
ucs ( t ) 1 G( jw ) ur ( t ) 1 w 2T2
G( jw ) ucs (t ) ur (t ) arctan wT
( 90)
0
1 2 1
2
wr wn
2 1
2
Mr
§5.2
幅相频率特性 ( Nyquist )(9)
G K
G( jw ) 幅相特性
w2 2 w 2 例5 系统的幅相曲线如图所试,求传递函数。 [1 2 ] [2 ] w w K n n G ( s ) 由曲线形状有 w s2 s 2 2 1 wn 2 G arctan wn wn w2 1- 2 wn G( j 0) K0 由起点: K 2
1
w2 2 w 2 [1 2 ] [2 ] wn wn w w 2 2 wn wn G arctan 360 arctan 2 w2 w 1- 2 1- 2 wn wn
G
§5.2
2
幅相频率特性 ( Nyquist )(11)
2 2
T 1 w n