基于MatlabSimulink的四轮转向汽车操纵动力学仿真分析
基于MATLABSimulink的车辆转向稳定性的仿真研究

10.16638/ki.1671-7988.2021.03.010基于MATLAB/Simulink的车辆转向稳定性的仿真研究马园杰,周旭(湖北汽车工业学院机械工程学院,湖北十堰442000)摘要:汽车的操纵稳定性是衡量汽车安全性最基本的指标之一,影响汽车行驶稳定性的基本因素主要有横摆角速度与质心侧偏角,将汽车简化为二自由度模型,建立关于横摆角速度与质心侧偏角的转向微分方程。
基于MA TLAB/Simulink软件建立仿真模型,对前轮转向与四轮转向典型的二自由度汽车模型进行仿真分析。
对比两轮转向和四轮转向的稳定性。
且四轮转向采用线控转向,将线控转向系统与四轮转向系统的优点结合起来,观察采用线控对汽车稳定性的影响。
关键词:二轮转向;四轮转向;横摆角速度;质心侧偏角中图分类号:TP391.9;U463.41 文献标示码:A 文章编号:1671-7988(2021)03-34-03 Simulation Research on Vehicle steering stability based on MATLAB/SimulinkMa Yuanjie, Zhou Xu(Department of Mechanical Engineering, Hubei University of Automotive Technology, Hubei Shiyan 442000)Abstract:Vehicle handing stability is the index to measure automobile safety. Yaw velocity and side slip angle are the basic factors that affect the vehicle handing stability. Simplify the car to two degree of freedom model. This paper establi -shed the differential equations of Yaw velocity and side slip angle. Using the MA TLAB/Simulinl to create the simulation model and analyze the stability of Vehicle steering system. Combine the advantage of the wire steering system with four wheel steering , Observe its effect on stability.Keywords: Two wheel steering; Four wheel steering; Yaw velocity; Side slip angleCLC NO.: TP391.9; U463.41 Document Code: A Article ID: 1671-7988(2021)03-34-03前言随着人们对现代汽车安全性及操纵稳定性的关注,汽车行驶稳定性越来越成为人们备受关注的焦点。
基于Simulink的四轮转向汽车神经网络控制策略仿真
万方数据趋向非线性,转向时的侧倾运动也不容忽视,故而,基于线性二自由度汽车模型得出的四轮转向控制规律不能适应汽车的实际状况.文中考虑了侧倾对汽车的影响,建立了三自由度四轮转向汽车模型,运用Simulink进行了分析,得出该汽车模型的控制特性.在此基础上,运用BP神经网络方法训练得到了四轮转向汽车控制器,并将其和汽车模型一起在Simulink中仿真.1三自由度四轮转向汽车动力学模型包含侧向、横摆、侧倾运动的线性三自由度四轮转向汽车模型的运动微分方程‘31:mu(口+r)一m。
鄙=砖(卢+詈一岛一Rr咖)+后,(p—brH一6,一Rr4,)(1)ti—k吊=。
k,(/3+arM一&一月r咖)一bkr(fl—br“一艿,一尺,咖)(2)厶‘|I—Li—m。
矗u(口+r)=m。
ghq,一后击咖一c,6(3)式中m为整车质量;m。
为簧载质量;a,b为质心至前后轴距离;h为侧倾力臂;Ix为簧载质量绕戈轴的转动惯量;t为整车绕z轴的转动惯量;乞为惯性积;k,,矗,分别为前、后轴综合侧偏刚度;k。
为前、后悬架侧倾角刚度之和;C小为前、后悬架侧倾角阻尼之和;咖为车身侧倾角;r为横摆角速度;u为纵向速度;卢为质心处侧偏角;,国,6,分别为汽车前、后轮转角;R,,R,分别为前、后轮侧倾转偏系数.考虑轮胎侧偏特性的非线性因素,文中引入由郭孔辉院士提出的轮胎统一模型的侧偏力模型H】:巧=1一exp(一日一E0:一(E2+丧)矿)(4)其中r等㈩h老式中参数E为曲率因子;“为轮胎侧偏角;墨为侧偏刚度;p,为侧向摩擦系数;Z为垂直载荷;Fy为侧偏力.2四轮转向汽车神经网络控制器设计四轮转向控制目标…:汽车中高速行驶情况下,小转角时,保持汽车的质心处侧偏角为0;大转角时,能够控制后轮转向角度而抗侧滑,保持行车的稳定性;汽车低速行驶情况下,在机构允许的范围内具备最大的机动性.在Simulink环境下建立四轮转向汽车模型,汽车参数见表1.表1汽车参数Tab.1Vehicleparameters名称数值名称数值m/kg1067kt/(N/rad)一55ooom。
基于Matlab_Simulink和神经网络的四轮转向车辆控制研究
β1
β β2 β β1
β2
o1
(a)
o2
β2 β1
(b)
β2
β1
o1
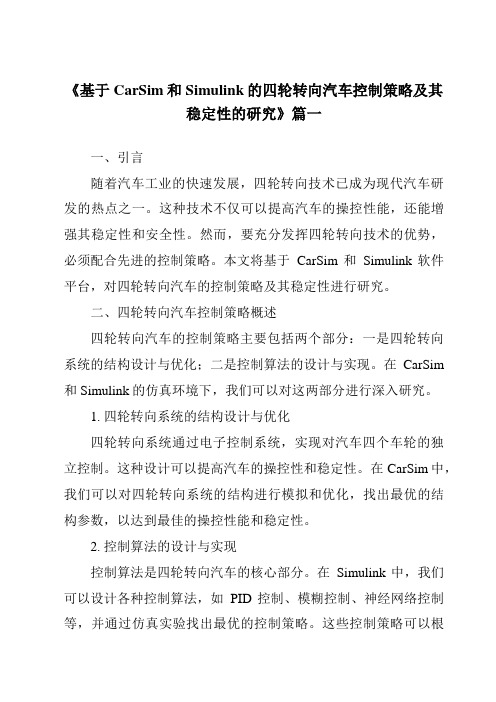
(c) (a)前轮低速转向 (c)四轮低速转向 图 1.1
o2
(d) (b)前轮高速转向 (d)四轮高速转向
两轮转向与四轮转向的对比
1
基于 Matlab/Simulink 和神经网络的四轮转向车辆控制研究
四轮转向的车辆在低速时,在后轮上附加一个与前轮转角相反的转角,可 以减小车辆的转弯半径。 由阿克曼 (Ackerman) 转向模型即可得出这样的结论[3], 即当前轮转角相同时,四轮转向车辆的转弯半径明显小于前轮转向车辆,使车 辆在低速转弯时更加灵活[4-8]。
Key words: 4WS, Nonlinear Tire, Neural Network, Handling and Stability, Simulation Analysis
基于 Matlab/Simulink 和神经网络的四轮转向车辆控制研究
第一章 绪论
1.1 四轮转向原理简介
随着汽车工业的不断发展,改善车辆的操纵稳定性,使驾乘更加舒适和安 全,是现今汽车技术的一个重要发展方向[1]。作为提高车辆操纵稳定性、主动安 全性的四轮转向技术在这种背景下应运而生,并得到了很大的发展。 四轮转向技术能使车辆在转弯时后轮直接参与对车辆侧偏角和侧向运动的 控制,不仅可以减少转向力产生的滞后,而且还能独立地控制车辆的运动轨迹 与姿态[2]。图 1.1 所示为两轮转向与四轮转向的对比[2],其中(a)和(b)为前轮转向 情况,(c)和(d)为四轮转向情况。由图可见,四轮转向车辆的姿态得以控制,车 辆的方向角与航向角重合,提高了车辆的侧向稳定性。
《基于CarSim和Simulink的四轮转向汽车控制策略及其稳定性的研究》范文
《基于CarSim和Simulink的四轮转向汽车控制策略及其稳定性的研究》篇一一、引言随着汽车工业的快速发展,四轮转向技术已成为现代汽车研发的热点之一。
这种技术不仅可以提高汽车的操控性能,还能增强其稳定性和安全性。
然而,要充分发挥四轮转向技术的优势,必须配合先进的控制策略。
本文将基于CarSim和Simulink软件平台,对四轮转向汽车的控制策略及其稳定性进行研究。
二、四轮转向汽车控制策略概述四轮转向汽车的控制策略主要包括两个部分:一是四轮转向系统的结构设计与优化;二是控制算法的设计与实现。
在CarSim 和Simulink的仿真环境下,我们可以对这两部分进行深入研究。
1. 四轮转向系统的结构设计与优化四轮转向系统通过电子控制系统,实现对汽车四个车轮的独立控制。
这种设计可以提高汽车的操控性和稳定性。
在CarSim中,我们可以对四轮转向系统的结构进行模拟和优化,找出最优的结构参数,以达到最佳的操控性能和稳定性。
2. 控制算法的设计与实现控制算法是四轮转向汽车的核心部分。
在Simulink中,我们可以设计各种控制算法,如PID控制、模糊控制、神经网络控制等,并通过仿真实验找出最优的控制策略。
这些控制策略可以根据汽车的行驶状态,实时调整四个车轮的转向角度,以达到最佳的操控性能和稳定性。
三、基于CarSim和Simulink的仿真研究在CarSim和Simulink的联合仿真环境下,我们可以对四轮转向汽车的控制系统进行深入研究。
首先,在CarSim中建立四轮转向汽车的模型,并设置各种行驶工况。
然后,将CarSim中的模型导入到Simulink中,设计控制算法,并进行仿真实验。
通过不断调整控制参数和控制策略,找出最优的控制方案。
四、四轮转向汽车的稳定性研究四轮转向汽车的稳定性是其重要的性能指标。
在CarSim和Simulink的仿真环境下,我们可以对四轮转向汽车的稳定性进行深入研究。
首先,通过仿真实验找出影响汽车稳定性的因素,如路面状况、车速、载荷等。
四轮转向论文:四轮转向后轮转向改装转向特性MTLABSIMULINK仿真ADAMS仿真
四轮转向论文:四轮转向后轮转向改装转向特性MTLAB/SIMULINK仿真 ADAMS仿真【中文摘要】汽车的四轮转向技术,在高速行驶时能明显地改善操纵稳定性;在低速行驶时能明显地减小转弯半径和操纵的灵活性。
由于目前大量使用的还是前轮转向汽车,为了使这些车辆通过简单的改装也具有四轮转向的功能,论文以改装两个后轮使其成为两个独立转向后轮的四轮转向车作为研究对象,对其特性进行了研究。
论文的主要工作如下:改装了后轮系统,使其具有转向功能,改装的后轮转向系统左右轮能实现独立转向。
设计了电动后轮转向系统的转向机构、无刷直流电机及其驱动电路和基于DSP控制器的四轮转向控制电路。
研究了改装汽车的后轮转向特性,分析了后轮转向系统的转向特性和理想四轮转向系统的高、低速转向特性。
此外,着重研究了本系统的转向中心不一致引起的轮胎磨损。
以四个车轮为研究对象,建立了三自由度汽车模型。
以前轮几何关系、稳态质心侧偏角、三种典型四轮转向中心为约束的控制目标。
并通过MATLAB/SIMULINK建立了仿真模型,对三种典型模式进行了仿真分析比较。
考虑实际车轮的非线性,使用ADAMS建立了改装的四轮转向汽车的虚拟样机,此样机包括前/后悬架模型、前/后转向系模型、轮胎模型和车身模型。
并结合MATLAB 进行联合仿真,其仿真结果和三自由度车辆的SIMULINK仿真基本相同。
通过论文的研究,得出了合适的控制约束使改装的汽车基本具有了四轮转向功能。
【英文摘要】Four-wheel steering technology of car can significantly improve the operational stability at high speed, and can significantly reduce the turning radius and operational flexibility at low speed. Because of the front wheel steering vehicle large-scale used currently, this paper choosesfour-wheel steering vehicle based on rear-wheel modified as the research object to study their properties in order to make these vehicles also have the advantages of four-wheel steering through a simple modification. The Major research results are:The rear wheels system was modified to make them achieve steering independence. The electric rear-wheel steering system, steering mechanism, brushless DC motor and its DSP-based controller, drive circuit and four-wheel steering control circuit were designed.The rear wheel steering characteristics of modified vehicle were studied. The high or low speed steering characteristics of the rear wheel steering system and ideal four-wheel steering system were analyzed. Besides, the tire wear caused by inconsistent steering center was focused on.Four wheels were chosen as the research object, and established3-DOF vehicle model. The geometric relationship of previous wheel , the steady-state sideslip angle, and the three typical four-wheel steering center were elected as control objectivesfor the constraint. Meanwhile simulation model was establishedby MATLAB / SIMULINK, and the three typical patterns were also simulated comparison.Considered the nonlinear of actual wheel,the virtual prototype of modified four-wheel steering vehiclewas established by ADAMS, including front / rear suspension model, front / rear steering system model, tire model and body model. Co-simulation was done combined with MATLAB, and the results are basically the same as that of the 3-DOF vehicle’s SIMULINK simulation.By this study, the conclusion of appropriate control constraints can make the vehicle havefour-wheel steering features basically was came to.【关键词】四轮转向后轮转向改装转向特性 MTLAB/SIMULINK仿真 ADAMS仿真【采买全文】1.3.9.9.38.8.4.8 1.3.8.1.13.7.2.1同时提供论文写作定制和论文发表服务.保过包发.【说明】本文仅为中国学术文献总库合作提供,无涉版权。
《基于CarSim和Simulink的四轮转向汽车控制策略及其稳定性的研究》

《基于CarSim和Simulink的四轮转向汽车控制策略及其稳定性的研究》篇一一、引言随着汽车技术的快速发展,四轮转向汽车因其在提高操控性能、稳定性及行驶安全性等方面的显著优势,受到了业界的广泛关注。
为深入探究四轮转向汽车的控制策略及其稳定性,本文结合CarSim和Simulink两款仿真软件,对四轮转向汽车的控制系统进行建模与仿真分析。
二、CarSim与Simulink的联合仿真1. 软件介绍CarSim是一款汽车动力学仿真软件,可以用于构建复杂的汽车模型并进行多体动力学仿真。
而Simulink则是一款多领域仿真建模与工程分析软件,可用于对汽车控制策略进行建模与仿真。
将这两款软件结合起来,可实现对四轮转向汽车的全局仿真。
2. 联合仿真过程在CarSim中构建四轮转向汽车的模型,设置相应的车辆参数和道路环境。
然后,将CarSim作为Simulink的外部模型,将两者进行联合仿真。
在Simulink中,建立控制策略模型,并通过对CarSim中的车辆模型进行实时控制,实现四轮转向汽车的仿真。
三、四轮转向汽车的控制策略1. 控制器设计四轮转向汽车的控制策略主要涉及到转向控制和稳定性控制两部分。
其中,转向控制主要通过调整各车轮的转角,实现车辆的灵活转向。
稳定性控制则主要通过实时监测车辆的行驶状态,对车轮的转角、制动力等进行调整,保证车辆的稳定性。
2. 控制策略的实现在Simulink中,通过建立控制器模型,实现对四轮转向汽车的控制。
控制策略主要包括PID控制、模糊控制、神经网络控制等多种方法。
在实际应用中,可根据需求选择合适的控制方法。
四、四轮转向汽车的稳定性分析1. 稳定性评价指标四轮转向汽车的稳定性主要受到车辆动力学特性的影响。
为评估四轮转向汽车的稳定性,本文采用侧向加速度、横摆角速度、质心侧偏角等指标进行评价。
2. 仿真结果分析通过CarSim和Simulink的联合仿真,得到四轮转向汽车在不同工况下的行驶数据。
基于Matlab_Simulink的四轮转向车辆操纵稳定性仿真
引
言1
四轮转向[1] (Four-wheel steering, 4WS)作为一种有效
描述系统典型环节,因此十分方便地建立系统模型而不 需要花较多时间编程。并可以对系统作适当的实时修正 或者按照仿真的最佳效果来调试及整定控制系统的参 数,以提高系统的性能,减少设计系统过程中反复修改 的时间,实现高效率地开发系统的目标。本文基于 Matlab/simulink 对四轮转向车辆的控制系统进行了设计, 并对 4WS 车辆的操纵稳定性进行了仿真研究。
1 4WS 车辆运动的数学模型
理论和实验都证明 [3] , 在正常车速范围 (一般意义 的低速到高速)的非紧急状态( low-g,低侧向加速度) 和小操纵转角输入情况下,二自由度车辆横向运动动 力学模型的精度是足够的。 车辆状态量为质心侧偏角 â 和 横 摆 角 速 度 r, 还 研 究 与 它 们 相 关 的 侧 向 加 速 度 & + r ) ,运动方程[4]如下: a y = V (β
改善车辆操纵性能的技术,近期在高档车中应用正受到 更多重视,有在中低档车上应用的趋势。使用 4WS 技术 的主要目的有:①减少车辆质心侧偏角β;②减少车辆 横摆率与车辆横向加速度之间的相差;③增加轮胎横向 力的裕度,使其远离饱和状态。从驾驶的观点看, 4WS 车辆低速时有较小的转弯半径,这增强了车辆的低速性 能,如更加灵活或和方便于泊车;高速时 4WS 车辆由于 由较小的β角和相差,高速变道将更加平滑,操纵控制 更容易,乘客感觉更加舒适;高速紧急避让时,车体较 少甩尾,减少了车体扫过的包线面积,从而减少了碰撞 的可能性。 Matlab 作为一种面向科学和工程计算的高级计算机 语 言 , 已 成 为 国 际 科 技 界 公 认 的 最 优 秀 应 用 软 件 [2] 。 Simulink 是 Matlab 提供的主要工具箱之一,用于可视化 的动态系统建模、仿真和分析。它采用系统模块直观地
第9章 汽车四轮转向控制系统的仿真 [基于MATLAB的控制系统仿真及应用]
0.41194
0.21239 B 0.85521
0.21149 D 10.67067
18
9.3.3 基于Matlab仿真
Amplitude
1、在低速(V 30km / h )下的系统仿真
0.5
Step Response
0
-0.5
-1
-1.5
-2
-2.5
Amplitude
Step Response
8
7
6
5
4
3
2
1
00
3
6
9
12
15
Time (sec)
图9.3.4高速时横摆角速度响应曲线
4WS车辆的横摆角 速度响应迅速,很 好地实现了驾驶员 的转向意图,同时 准确地跟踪了期望 的横摆角速度。
22
由最优控制理论可知,若控制输入为
c KX R1BT LX 则性能指标J为最小
最优控制可用 c 最优反馈增益矩阵写成:
c KX [k1
得到
k2
]
r
(k1
k2r)
X ( A BK ) X Ds
16
9.3.3 基于Matlab仿真
-3
-3.50
1
2
3
4
Time (sec)
图9.3.1低速时质心侧偏角响应曲线
与2WS汽车相比,采 用最优控制的4WS车 辆的质心侧偏角瞬态 响应性能得到很大改 善,能够很快地到达 稳态值,超调量明显 减小,汽车的运动姿 态得到了很好的控制
19
9.3.3 基于Matlab仿真
1、在低速(V 30km / h)下的系统仿真
基于MATLAB的控制系统仿真及应用第9章应用实例3汽车四轮转向控制系统仿真课件
f
G / f
(s)
c1s c0 m's2 hs
f
Gr /r
(s)
b1s b0 m's2 hs
f
G /r (s)
d1s d0 m's2 hs
f
3
9.2.3 基于Matlab/Simulink仿真
本例采用的汽车模型参数,见表9.2: 表9.2 汽车模型参数设置
变量名称 数值
单位 变量名称 数值
12.369s 14.6688 Gr /r (s) s2 2.5077s 3.2734
0.6339s 9.8231 G / f (s) s2 2.5077s 3.2734
0.6392s 13.0966 G /r (s) s2 2.5077s 3.2734
稳态横摆角速度增益
r
f
s
最后得到4WS系统的传递函数矩阵为:
G(s) Y (s) C[sI A BK ]1 D s (s)
16
9.3.3 基于Matlab仿真
本例中选取 Kc 0.5,权系数 q 5,0 前轮转角 为单 s 位阶跃输入进行Matlab仿真。具体模型 数值设置如表9.3.1所示。
1、在低速( V 30km/ )h 下的系统仿真
0
5
-0.5
2WS系统
4
横摆角速度反馈的4WS系统
-1
3
-1.5
-2 2
-2.5
定前后轮比例控制的4WS系统
横摆角速度反馈的4WS系统
1
-3
0
0
2
4
6
8
10
图9.2.3 低速时横摆角速度响应曲线
-3.5
0
基于MatlabSimulink的四轮转向汽车操纵动力学仿真分析资料
武汉理工大学课程论文基于Matlab/Simulink的四轮转向汽车操纵动力学仿真分析课程:汽车动力学学院(系):汽车工程学院专业班级:汽研学号:学生姓名:任课教师:乔维高基于Matlab/Simulink 的四轮转向汽车操纵动力学仿真分析摘要:本文分析了四轮转向(4WS)汽车的运动特性,建立了三自由度四轮转向汽车动力学模型,并基于Matlab /Simulink 对四轮转向汽车的操纵动力学进行仿真分析,结果表明四轮转向汽车的操纵性能要优于前轮转向汽车。
关键词:汽车,四轮转向,操纵动力学,仿真分析Simulation for the Handling Dynamics of Four-wheelSteering Vehicle Based on Matlab/SimulinkAbstract: In this paper, the motion characteristics of four-wheel steering (4WS)vehicle are analyzed. The three degrees of freedom simulation analysis of four-wheel steering vehicle dynamics model is established. The simulation for the handling dynamics of four-wheel steering vehicle based on Matlab / Simulink is done, and the results show that the handling performance of four-wheel steering vehicle is better than the front wheel steering vehicle.Key words: vehicle, four-wheel steering, handling dynamics, simulation 1 引言早期的汽车均采用前轮转向方式,但传统的前轮转向汽车具有低速时有低速时转向响应慢,回转半径大,转向不灵活;高速时方向稳定性差等缺点。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
武汉理工大学课程论文基于Matlab/Simulink的四轮转向汽车操纵动力学仿真分析课程:汽车动力学学院(系):汽车工程学院专业班级:汽研学号:学生姓名:任课教师:乔维高基于Matlab/Simulink 的四轮转向汽车操纵动力学仿真分析摘要:本文分析了四轮转向(4WS)汽车的运动特性,建立了三自由度四轮转向汽车动力学模型,并基于Matlab /Simulink 对四轮转向汽车的操纵动力学进行仿真分析,结果表明四轮转向汽车的操纵性能要优于前轮转向汽车。
关键词:汽车,四轮转向,操纵动力学,仿真分析Simulation for the Handling Dynamics of Four-wheelSteering Vehicle Based on Matlab/SimulinkAbstract:Inthispaper,themotioncharacteristicsoffour-wheelsteering(4WS)vehicle are analyzed.The three degrees of freedom simulation analysis of four-wheel steering vehicle dynamics model is established. The simulation forthe handling dynamics of four-wheel steering vehicle based on Matlab / Simulink is done, and the results show that the handling performance of four-wheel steering vehicle is better than the front wheel steering vehicle.Key words:vehicle, four-wheel steering, handling dynamics, simulation 1 引言早期的汽车均采用前轮转向方式,但传统的前轮转向汽车具有低速时有低速时转向响应慢,回转半径大,转向不灵活;高速时方向稳定性差等缺点。
随着科学技术的发展,人们生活水平的提高,市场对汽车的要求也越来越高,希望汽车有更高的安全性和舒适性。
因此汽车的操纵稳定性,已经成为当代汽车研究的一个重要方面。
四轮转向(4WS )汽车应运而生。
四轮转向是在前轮转向的基础上,使后轮按一定的控制规律跟随前轮绕自己的转向轴转动,实现汽车转向。
它对于改善汽车高速时的操纵稳定性和减小低速时的转弯半径起到非常大的作用。
本文分析了四轮转向(4WS)汽车的运动特性,建立了三自由度四轮转向汽车动力学模型,并基于Matlab /Simulink 对四轮转向汽车的操纵动力学进行了仿真分析。
2 四轮转向汽车运动特性分析四轮转向汽车转弯时的几何关系如图1所示。
FWS 汽车只有前轮转角,而4WS汽车的后轮也有转角。
由图可知,当仅有前轮转角δ1时,可求得汽车转弯半径10tan δLR =(2.1)当前轮转弯半径不大时,tan δ1=δ1,于是式(1.1)可写为10δLR =(2.2) 当后轮有附加转角δ2时,可求得转弯半径21tan tan δδ-=LR (2.3)同理,当δ1和δ2不大时,式(1.3)可写为()f K LL R -=-=1121δδδ (2.4)式中,f K 为后轮与前轮转角比。
显然,当前轮转向,后轮不转向时,f K =0,R=R 0;当前后轮同向转向时,f K >0,R>R 0;当前后轮反向转向时,f K <0,R<R 0。
也就是说,前、后轮反向转向时会减小转弯半径,增加车辆运动的机动性。
所以, 4WS 汽车低速转弯或急转弯时,前、后轮反向转向;而高速转弯或变换车道时,前、后轮同向转向,实际上增大了转弯半径,减小了离心力,转弯平稳,便于控制。
图1 四轮转向汽车转弯时的转向几何关系3 三自由度四轮转向汽车动力学模型通过研究文献发现,线性二自由度汽车单轨模型没有考虑侧倾、轮胎的受力情况、轮胎的非线性特性等在汽车转向过程中都很重要的因素,所以线性两自由度汽车单轨模型在研究四轮转向系统时不具有很高的仿真度。
因此,为了更精确的研究四轮转向系统的动力学情况,本文建立了三自由度四轮转向汽车动力学模型。
三自由度模型是在二自由度模型的基础上增加了侧倾运动,即4WS汽车三自由度模型包括:侧向、横摆和侧倾三个方向的运动。
为简化系统模型,特作如下假设:(1)车体关于x−z平面对称;(2)整车质量分为两部分:悬挂质量与非悬挂质量;(3)汽车的侧倾轴近似固定不变;(4)忽略各种空气阻力、轮胎滚动阻力及非悬挂质量的侧倾效应;(5)轮胎保持与地面接触,各轮胎所接触的路面条件相同,左右轮胎具有相同的侧偏特性。
图2 三自由度四轮转向汽车动力学模型侧视图图3 三自由度四轮转向汽车动力学模型后视图如图2所示,汽车的前、后车轴均具有一个可认为固结于非悬挂质量的“侧倾中心”,定义为车身发生侧倾时,相对于轮胎接地印迹处不发生任何侧向移的点。
一般汽车的前、后侧倾中心高度不等,而汽车前、后轴侧倾中心的连线被为“侧倾中心轴”,所以侧倾中心轴与水平面通常不平行,即图2中斜线。
s h 表示汽车质心到侧倾中心轴的距离。
∙=ϕr 为车辆横摆角速度;β为质心侧偏角;f δ、r δ分别为车辆前、后轮转角;φ为车身侧倾角;∙φ为侧倾角速度;u 车辆质心处的速度,保持不变。
如图3所示,取参考点O 为通过悬挂质量质心的垂线与侧倾中心轴的交点,将汽车分为不发生侧倾的非悬挂质量(M-Ms)(M 为整车质量),定义为汽车参考基A ,对应有坐标系a ;以及具有侧倾自由度的悬挂车身质量(Ms),定义为车身运动参考基B ,对应有坐标系b ;并定义地面参考基为G 。
坐标系b 的每一矢量b 1、b 2、b 3与坐标系a 的每一矢量a 1、a 2、a 3的转换关系见表1。
表1 坐标系a 与坐标系b 的转换关系b 1 b 2 b 3a 1a 2 a 31 0 0 0 cos φ sin φ0 -sin φ cos φ分别考虑侧向运动、横摆运动和侧倾运动的三自由度四轮转向汽车模型可导出动力学方程:侧向运动:y s S F h M r Mu =-⎪⎪⎭⎫⎝⎛+∙∙∙φβ(3.1) 横摆运动:Z xz z M I r I =+∙∙∙φ (3.2) 侧倾运动:x x xz L I r I =+-∙∙∙φ (3.3) 式中,y F 是外力的和,Z M 和x L 是外力矩的和,z I 、x I 为转动惯量,xz I 为惯性积。
21F F F y += (3.4) 21bF aF M z -=(3.5) φβφφφφφcos sin ⎪⎪⎭⎫⎝⎛+++--=∙∙r u h M gh M K C L s s s s X(3.6) 综合以上各式,可得到侧向、横摆和侧倾三个自由度的四轮转向汽车方程:⎪⎪⎭⎫ ⎝⎛----⎪⎪⎭⎫ ⎝⎛--+-=-⎪⎪⎭⎫ ⎝⎛+∙∙∙φδβφδβφβr r f f s s R r u bk R r u a k h M r Mu 21 (3.7)⎪⎪⎭⎫ ⎝⎛---+⎪⎪⎭⎫ ⎝⎛--+-=-∙∙∙φδβφδβφr r f f xz z R r u bb k R r u a a k I r I 21 (3.8) ()φφβφφφs s s s xzx gh M K C r u h M r I I ---=⎪⎪⎭⎫⎝⎛+--∙∙∙∙∙ (3.9)式中,f R 、r R 为前、后轮转向侧倾系数,φK 为侧倾刚度,φC 为侧倾阻尼。
三自由度四轮转向汽车模型的一般状态表达式为:u M x M x M 321+=∙(3.10) 式中:系统状态变量:][()T r f TTu r x x x x x δδφφβ,,,,,,,,4321=⎥⎦⎤⎢⎣⎡==∙其中:1x =r ——横摆角速度; 2x =β——质心侧偏角:3x =φ——车身侧倾角; 4x =∙φ——车身侧倾角速度。
⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡----=010000001xx s s xz xz zs s I u h M I I I h M MuM⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎣⎡----+-+-+-----=1000)(00)(0)(212122212121212φφC gh M K u h M bR k aR k bk ak u b k a k R k R k k k Mu u bk a k M s s s s r f r f⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-=000021213b k a k k k M 三自由度四轮转向汽车模型的标准状态表达式为: ⎪⎩⎪⎨⎧+=+=∙DuCx y BuAx x (3.11) 式中,311211,M M B M M A --==,⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=00000000,1000010*********D C 。
4 四轮转向汽车操纵动力学仿真分析汽车操纵动力学是研究在横向外力作用下,汽车转向行驶时的操纵稳定性。
包括操纵性和稳定性两种情况,前者是指驾驶员给汽车一个激励,如转向盘转过 一定的角度或受到一个外力矩,汽车遵循驾驶员给定方向行驶的能力。
而稳定性 是指当汽车遭遇外界干扰时抵抗干扰保持稳定行驶的能力,与驾驶员无关。
汽车操纵特性好坏是由其系统的稳定性、转向行驶时的稳态响应和频率响应反映。
Matlab 作为一种面向科学和工程计算的高级计算机语言,已成为国际科技界公认的最优秀应用软件。
Simulink 是 Matlab 提供的主要工具箱之一,用于可视化的动态系统建模、仿真和分析。
它采用系统模块直观地描述系统典型环节,因此十分方便地建立系统模型而不需要花较多时间编程。
并可以对系统作适当的实时修正或者按照仿真的最佳效果来调试及整定控制系统的参数,以提高系统的性能,减少设计系统过程中反复修改的时间,实现高效率地开发系统的目标。
本文基于建立的三自由度四轮转向汽车动力学模型,在Matlab 软件中建立了Simulink 仿真模型,如图4所示。
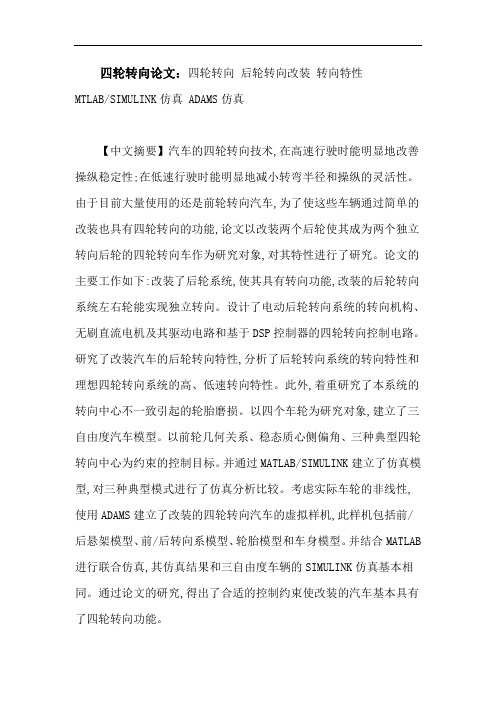
图4 Simulink 仿真模型4.1 频域响应分析实际汽车的横摆角速度频率特性可以通过转向盘角脉冲输入瞬态响应试验求得的。
这样可以把横摆角速度频率特性的幅频特性和相频特性进行对比分析。
幅频特性反映了不同频率输入时,汽车本身失真的程度。
相频特性反映了汽车横摆角速度滞后于转向盘转角的失真程度。
利用 MATLAB 求解系统的幅频响应和相频响应如图5所示。
图5 频域响应分析由频域响应分析图可见,相对于前轮转向系统,四轮转向系统具有较低的横摆角速度,两者相位基本相同。