电子信息工程文献专业英语中英互译资料讲解
电子信息与通信工程专业英语课文翻译1.4
基础电子学电子学衍生于对电力的研究和应用,是工程学和应用物理学的领域。
电力涉及力的产生,传输与使用金属导体。
电子学利用电子不同的运动方式及通过供气材料,如硅与锗等半导体,其他设备如太阳能电池,LED,微波激射器,激光及微波管等实现。
电子学应用于包括广播、雷达、电视、卫星系统传输,导航辅助设备系统,控制系统,空间探测设备,微型设备如电子表,许多电气设备和电脑等方面。
1.电子学的开端电子学的历史始于20世纪,包括三个关键元素:真空管,晶体管和集成电路。
19世纪早期是理论和发明取得重大发展的时代。
发现了红外线和紫外线。
道尔顿在1808年提出了原子理论。
在1840年之前就发现了热电效应、电解效应和光电效应。
20年之间相继产生了工作在低压下的放电管,辉光放电,新型电池及早期的扩音器。
因此,在1800—1875年之间,发现了基本的物理现象,电话,留声机,麦克风及扬声器等在实际应用中达到了极致。
至于19世纪末期,无线电报,磁记录,阴极射线示波器等都被发明了。
20世纪早期也见证了现代电子技术的开端。
1880年爱迪生发明了白炽灯成为现代电子领域的历史先驱者。
他发现有微弱的电流从加热的灯丝流向真空管内附着的金属板。
这就是众所周知的“爱迪生效应”。
如果使用了一个非电器的热源,注意到电池仅是必要的用来加热灯丝使电子移动。
1904年,约翰利用爱迪生效应发明了二极管,李.德.佛列思特紧接着在1906年发明了三极管。
这些真空管设备使电子能源控制的放大及传输成为可能。
20世纪初真空管的引入使现代电子学快速成长。
采用真空管让信号的控制成为可能,这是早期的电报电话电路不可能实现的,也是早期用高压电火花产生无线电波的发射机所不能实现的。
电子管首先应用于无线通信。
Guglielmo Marconi于1896年开辟了无线电报的发展,于1901年实现了远距离广播交流。
早期的收音机包括了无线电报(摩尔斯电码信号传输)或收音机电话(语音留言)。
电子信息工程专业英语 课文翻译 Unit 05 译文
Unit 5 多址技术Unit 5-1第一部分:多址技术:频分多址、时分多址、码分多址多址方案用于使许多用户同时使用同一个固定带宽的无线电频谱。
在任何无线电系统中分配的带宽总是有限的。
移动电话系统的典型总带宽是50MHz ,它被分成两半用以提供系统的前向和反向连接。
任何无线网络为了提高用户容量都需要共享频谱。
频分多址(FDMA )、时分多址(TDMA )、码分多址(CDMA )是无线系统中由众多用户共享可用带宽的三种主要方法。
这些方法又有许多扩展和混合技术,例如正交频分复用(OFDM ),以及混合时分和频分多址系统。
不过要了解任何扩展技术首先要求对三种主要方法的理解。
频分多址在FDMA 中,可用带宽被分为许多个较窄的频带。
每一用户被分配一个独特的频带用于发送和接收。
在一次通话中其他用户不能使用同一频带。
每个用户分配到一个由基站到移动电话的前向信道以及一个返回基站的反向信道,每个信道都是一个单向连接。
在每个信道中传输信号是连续的,以便进行模拟通信。
FDMA 信道的带宽一般较小(30kHz ),每个信道只支持一个用户。
FDMA 作为大多数多信道系统的一部分用于初步分割分配到的宽频带。
将可用带宽分配给几个信道的情况见图5.1和图5.2。
时分多址TDMA 将可用频谱分成多个时隙,通过分配给每一个用户一个时隙以便在其中发送或接收。
图5.3显示如何以一种循环复用的方式把时隙分配给用户,每个用户每帧分得一个时隙。
TDMA 以缓冲和爆发方式发送数据。
因此每个信道的发射是不连续的。
待发送的输入数据在前一帧期间被缓存,在分配给该信道的时隙中以较高速率爆发式发送出去。
TDMA 不能直接传送模拟信号因为它需要使用缓冲,因而只能用于传输数字形式的数据。
由于通常发送速率很高,TDMA 会受到多径效应的影响。
这导致多径信号引起码间干扰。
TDMA 一般与FDMA 结合使用,将可用的全部带宽划分为若干信道。
这是为了减少每个信道上的用户数以便使用较低的数据速率。
电子信息工程专业英语 课文翻译 Unit 12 译文
Unit 12 生物识别技术Unit 12-1第一部分:指纹识别在所有的生物技术中,指纹识别是最早期的一种技术。
我们知道,每个人都有自己独特的、不可变更的指纹。
指纹是由手指表皮上的一系列峰谷组成的。
指纹的独特性是由这些峰谷的形状以及指纹的细节点所决定的。
指纹的细节点是指纹局部凸起处的一些特性,这些特性出现在凸起的分叉处或是凸起的截止处。
指纹匹配技术可以被分为两类:基于细节的指纹匹配技术和基于相关性的指纹匹配技术。
基于细节的指纹匹配首先要找出细节点,然后在手指上对应出与它们相关的位置,如图12.1所示。
但是,使用这种方法存在一些困难。
要精确地提取指纹的细节点是很困难的。
而且,这种方法不能很好地考虑指纹峰谷的整体形状。
基于相关性的指纹匹配技术可以解决部分基于细节的指纹匹配方法存在的问题,但它也存在一些自身的缺陷。
基于相关性的匹配技术需要给出已注册过的特征点的精确位置,并且该方法会受图像平移和旋转的影响。
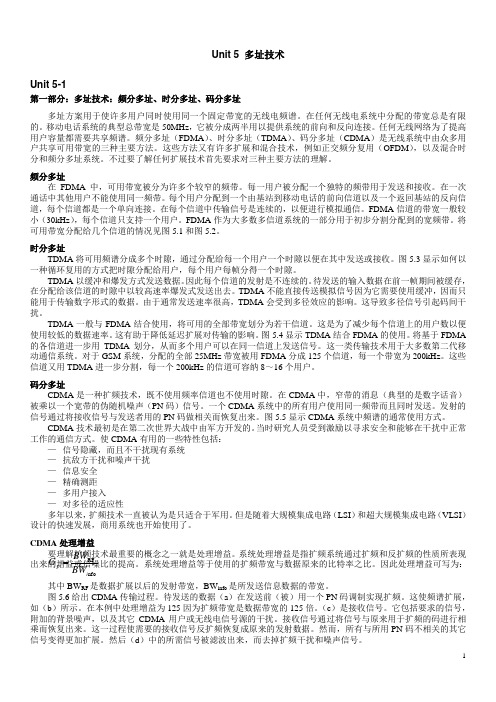
图12.1 基于细节的指纹匹配基于细节的指纹匹配技术在匹配不同大小的细节模型时(未注册过的)会存在一些问题。
指纹上局部的凸起结构不能完全由指纹细节实现特征化。
我们可以尝试另一种表达指纹的方法,它可以获得更多的指纹局部信息并且得到固定长度的指纹编码。
于是,我们只需要计算两个指纹编码之间的欧几里得距离,匹配过程有望变得相对简单。
研发对于指纹图像中噪声更稳健并能实时提供更高精度的算法是重要的。
商用指纹(身份)认证系统对给定的错误接受率要求具有很低的错误拒绝率。
在这点上,任何一项简单的技术都很难实现。
我们可以从不同的匹配技术中汇总多个证据从而提高系统的总体精确度。
在实际应用中,传感器、采集系统、性能随时间的变化是关键因素。
为了评价系统性能,我们有必要对少数使用者在一段时间内进行现场试验。
每天我们可以从法医鉴定、出入口控制、驾驶证登记等多个方面的应用中采集并保存大量的指纹。
基于指纹的自动识别系统需要把输入的指纹与数据库中大量的指纹进行匹配验证。
电子信息工程专业英语翻译清华出版社nglish for IT and EE-08
(bps) of transmitted information in the sense that going to a
higher information rate requires a higher frequency. Thus, the first observation from the frequency line would be that, for optical carriers, which have frequencies in the hundreds of THz, information bandwidth is in some sense free. 信息的带宽在 某种意义上是 免费的 因此在较高的信息率要求较高 的频率这层意义上,要考虑传 输信息的每个bps成本问题
与用于信息传输的光学技术 的潜力有关的
仔细研究表8.1中的频率表可以看到各种用于信息传 A frequency line which gives the wavelengths , the frequencies
, and the photon energy p for the various regions of the frequency
9
2
As wavelengths decrease to approach the size of circuit
components, circuit elements are no longer lumped, and leads
can act as reflective components and/or antennas and lumped
电子行业-电子信息工程专业英语翻译清华出版社EnglishforITandEE02 精品

because it is composed of a sandwich of N-P-N doped silicon.
When a small current is injected into the base terminal, a
查阅大学化学书中的元素周期表, 你会查到半导体是介于金属与非金 属之间的一类元素。
6
1
They are called semiconductors because of their ability to behave as both metals and nonmetals. A semiconductor can be made to conduct electricity like a metal or to insulate as a nonmetal does. These differing electrical properties can be accurately controlled by mixing the semiconductor with small amounts of other elements.
flip-flop触发器,双稳态多谐振荡器 die印模,模子
silicon 硅
valve阀
phosphorous 磷的
insulate绝缘,隔离
bipolar 有两极的,双极的
doping掺杂(质)
base基极
germanium锗
emitter发射极
boron硼
drain漏极
field-effect场效应
9
2
This figure shows both the silicon structures of these elements
电子信息工程专业英语英译汉翻译
1 The transistor is what started the evolution of the modern computer industry in motion.晶体管开启了现代电脑工业的革命2 The storage cell only requires one capacitor and one transistor, whereas a flip-flop connected in an array requires 6 transistors.存储单元仅需要一个电容和晶体管,并而不像触发器整列那样需要6个晶体管3 There has been a never ending series of new op amps released each year since then, and their performance and reliability has improved to the point where present day op amps can be used for analog applications by anybody.从此以后每年都有新系列的运放发布,他们的性能和可靠性得到了提升,如今任何人都能用运放来设计模拟电路。
4 This is capable of very high speed conversion and thus can accommodate high sampling rates, but in its basic form is very power hungry.它具有高速转换能力,从而能适应高速采样速率,但它的基本形式非常耗电。
5 During the “on” period , energy is being stored within the core material of the inductor in the form of flux.在”on”阶段,能量以涌浪形式存储在电感的核芯材料里面6 The design goal of frequency synthesizers is to replace multiple oscillators in a system, and hence reduce board space and cost.频率合成器的设计目标是取代系统中多个振荡器,从而减小板卡面积和成本。
最新电子信息工程专业英语课文翻译(第3版)
电子信息工程专业英语教程第三版译者:唐亦林p32In 1945 H. W. Bode presented a system for analyzing the stability of feedback systems by using graphical methods. Until this time, feedback analysis was done by multiplication and division, so calculation of transfer functions was a time consuming and laborious task. Remember, engineers did not have calculators or computers until the '70s. Bode presented a log technique that transformed the intensely mathematical process of calculating a feedback system's stability into graphical analysis that was simple and perceptive. Feedback system design was still complicated, but it no longer was an art dominated by a few electrical engineers kept in a small dark room. Any electrical engineer could use Bode's methods find the stability of a feedback circuit, so the application of feedback to machines began to grow. There really wasn't much call for electronic feedback design until computers and transducers become of age.1945年HW伯德提出了一套系统方法,用图形化方法来分析反馈系统的稳定性。
电子信息工程文献专业英语中英互译
Electronic power steering systemWhat it is?Electrically powered steering uses an electric motor to drive either the power steering hydraulic pump or the steering linkage directly. The power steering function is therefore independent of engine speed, resulting in significant energy savings.How it works?Conventional power steering systems use an engine accessory belt to drive the pump, providing pressurized fluid that operates a piston in the power steering gear or actuator to assist the driver.In electro-hydraulic steering, one electrically powered steering concept uses a high efficiency pump driven by an electric motor. Pump speed is regulated by an electric controller to vary pump pressure and flow, providing steering efforts tailored for different driving situations. The pump can be run at low speed or shut off to provide energy savings during straight ahead driving (which is most of the time in most world markets).Direct electric steering uses an electric motor attached to the steering rack via a gear mechanism (no pump or fluid). A variety of motor types and gear drives is possible. A microprocessor controls steering dynamics and driver effort. Inputs include vehicle speed and steering, wheel torque, angular position and turning rate.Working In Detail:A "steering sensor" is located on the input shaft where it enters the gearbox housing. The steering sensor is actually two sensors in one: a "torque sensor" that converts steering torque input and its direction into voltage signals, and a "rotation sensor" that converts the rotation speed and direction into voltage signals. An "interface" circuit that shares the same housing converts the signals from the torque sensor and rotation sensor into signals the control electronics can process. Inputs from the steering sensor are digested by a microprocessor control unit that alsomonitors input from the vehicle's speed sensor. The sensor inputs are then compared to determine how much power assist is required according to a preprogrammed "force map" in the control unit's memory. The control unit then sends out the appropriate command to the "power unit" which then supplies the electric motor with current. The motor pushes the rack to the right or left depending on which way the voltage flows (reversing the current reverses the direction the motor spins). Increasing the current to the motor increases the amount of power assist.The system has three operating modes: a "normal" control mode in which left or right power assist is provided in response to input from the steering torque and rotation sensor's inputs; a "return" control mode which is used to assist steering return after completing a turn; and a "damper" control mode that changes with vehicle speed to improve road feel and dampen kickback.If the steering wheel is turned and held in the full-lock position and steering assist reaches a maximum, the control unit reduces current to the electric motor to prevent an overload situation that might damage the motor. The control unit is also designed to protect the motor against voltage surges from a faulty alternator or charging problem.The electronic steering control unit is capable of self-diagnosing faults by monitoring the system's inputs and outputs, and the driving current of the electric motor. If a problem occurs, the control unit turns the system off by actuating a fail-safe relay in the power unit. This eliminates all power assist, causing the system to revert back to manual steering. A dash EPS warning light is also illuminated to alert the driver. To diagnose the problem, a technician jumps the terminals on the service check connector and reads out the trouble codes.Electric power steering systems promise weight reduction, fuel savings and package flexibility, at no cost penalty.Europe's high fuel prices and smaller vehicles make a fertile testbed for electric steering, a technology that promises automakers weight savings and fuel economy gains. And in a short time, electric steering will make it to the U.S., too. "It's just just a matter of time," says Aly Badawy, director of research and development for Delphi Saginaw SteeringSystems in Saginaw, Mich. "The issue was cost and that's behind us now. By 2002 here in the U.S. the cost of electric power steering will absolutely be a wash over hydraulic."Today, electric and hybrid-powered vehicles (EV), including Toyota's Prius and GM's EV-1, are the perfect domain for electric steering. But by 2010, a TRW Inc. internal study estimates that one out of every three cars produced in the world will be equipped with some form of electrically-assisted steering. The Cleveland-based supplier claims its new steering systems could improve fuel economy by up to 2 mpg, while enhancing handling. There are true bottom-line benefits as well for automakers by reducing overall costs and decreasing assembly time, since there's no need for pumps, hoses and fluids.Another claimed advantage is shortened development time. For instance, a Delphi group developed E-TUNE, a ride-and-handling software package that can be run off a laptop computer. "They can take that computer and plug it in, attach it to the controller and change all the handling parameters -- effort level, returnability, damping -- on the fly," Badawy says. "It used to take months." Delphi has one OEM customer that should start low-volume production in '99.Electric steering units are normally placed in one of three positions: column-drive, pinion-drive and rack-drive. Which system will become the norm is still unclear. Short term, OEMs will choose the steering system that is easiest to integrate into an existing platform. Obviously,greater potential comes from designing the system into an all-new platform. "We have all three designs under consideration," says Dr. Herman Strecker, group vice president of steering systems division at ZF in Schwaebisch Gmuend, Germany. "It's up to the market and OEMs which version finally will be used and manufactured." "The large manufacturers have all grabbed hold of what they consider a core technology," explains James Handy sides, TRW vice president, electrically assisted steering in Sterling Heights, Mich. His company offers a portfolio of electric steering systems (hybrid electric, rack-, pinion-, and column-drive). TRW originally concentrated on what it still believes is the purest engineering solution for electric steering--the rack-drive system. The system is sometimes refer to as direct drive orball/nut drive. Still, this winter TRW hedged its bet, forming a joint venture with LucasV arity. The British supplier received $50 million in exchange for its electric column-drive steering technology and as sets. Initial production of the column and pinion drive electric steering systems is expected to begin in Birmingham, England, in 2000.In 1995, according to Delphi, traditional hydraulic power steering systems were on 7596 of all vehicles sold globally. That 37-million vehicle pool consumes about 10 million gallons in hydraulic fluid that could be superfluous, if electric steering really takes off.The present invention relates to an electrically powered drive mechamsm for providing powered assistance to a vehicle steering mechanism. According to one aspect of the present invention, there is provided an electrically powered driven mechanism for providing powered assistance to a vehicle steering mechanism having a manually rotatable member for operating the steering mechanism, the drive mechanism including a torque sensor operable to sense torque being manually applied to the rotatable member, an electrically powered drive motor drivingly connected to the rotatable member and a controller which is arranged to control the speed and direction of rotation of the drive motor in response to signals received from the torque sensor, the torque sensor including a sensor shaft adapted for connection to the rotatable member to form an extension thereof so that torque is transmitted through said sensor shaft when the rotatable member is manually rotated and a strain gauge mounted on the sensor shaft for producing a signal indicative of the amount of torque being transmitted through said shaft. Preferably the sensor shaft is non-rotatably mounted at one axial end in a first coupling member and is non-rotatably mounted at its opposite axial end in a second coupling member, the first and second coupling members being inter-engaged to permit limited rotation there between so that torque under a predetermined limit is transmitted by the sensor shaft only and so that torque above said predetermined limit is transmitted through the first and second coupling members.Now, power steering systems of some cars have become the standard-setting, the whole world about half of the cars used to powersteering. With the development of automotive electronics technology, some cars have been using electric power steering gear, the car of the economy, power and mobility has improved. Electric power steering device on the car is a new power steering system device, developed rapidly in recent years both at home and abroad, because of its use of programmable electronic control devices, the flexibility in the same time there are also potential safety problems. In the analysis This unique product on the basis of the author of the characteristics of electronic control devices, security clearance just that the factors that deal with security measures, and discussed a number of concerns the safety of specific issues. The results show that : Existing standards can not meet the electric power steering device security needs and made the electric power steering device safety evaluation of the idea. Research work on the electric power steering device development and evaluation of reference value.电子动力转向系统电子动力转向系统是什么?电子动力转向系统是通过一个电动机来驱动动力方向盘液压泵或直接驱动转向联动装置。
电子信息专业英语课文翻译(部分)
电子信息专业英语课文翻译1. Chapter 1 Introduction to Electronic Technology电子技术简介1.1. Lesson 1 Development of Electronics 电子技术开展史电子技术的历史是一个关于二十世纪的故事,电子学的三个关键元件是真空管、晶体管和集成电路。
真空管也叫做电子管,它是一个密封的玻璃管,在它里面,电子在有真空隔离的电极之间流动。
在20〔19×〕世纪早期创造了真空管,随着真空管的创造,放大和传输电能成为可能。
电子管的第一应用在于无线电通信。
在第二次世界大战之前,随着越来越多的专门真空管被制造出来用于各种用处,通信技术从而能得到了宏大的进步。
在20世纪20年代时,无线电播送呈天文数字地增长并且成为家庭娱乐的主要来源。
电视机是在1927年创造,并且最终得到了广泛的应用。
电视机作为一种电子设备,其开展得益于在二次世界大战期间雷达上的许多进步。
雷达利用无线电微波回声来测量一个物体的间隔和方向,被用于检测飞机和船只。
世界大战之后,电子管被用于开发第一台计算机,但是因为电子元件的尺寸,所以这些计算机是不实在际的。
在1947年,来自贝尔实验室的一组工程师们创造了晶体管,因为创造了晶体管,他们获得了诺贝尔奖。
晶体管的功能类似于真空管,但与真空管相比,它体积小、重量轻、消耗功率低、更加可靠和制造本钱低。
在几乎所有的电子设备中晶体管取代了真空管。
在20世纪 50年代时,美国德州仪器公司开展出第一个集成电路。
第一个集成电路仅包含了几个晶体管,在随后的20世纪70年代中期,出现了大规模集成电路和超大规模集成电路。
超大规模集成电路技术允许我们在一个单芯片中构建一个包含有成千上万晶体管的系统。
摄像机、手提和个人电脑仅仅是集成电路使之成为可能的一些设备实例。
1.2. Lesson 2 Singapore Polytechnic 新加坡理工学院新加坡理工学院,是新加坡同类学校中的第一家教育机构,创立于1954年,学院着重培养和训练技术人员和专业人员,从而支持新加坡的工业和经济的开展。
电子信息工程专业专业英语三千字翻译
Unit3 computer architecture and microprocessors3--1 Computer Architecture1) Computer architecture , in computer science , is a general term referring to the structure of all or part of computer system . The term also covers the design of system software , such as the operating system (the program that controls the computer) , as well as referring to the combination of hardware and basic software that links the machines on a computer network . Computer architecture refers to an entire structure and to the details needed to make it functional . Thus , computer architecture covers computer systems , microprocessors , circuits , and system programs . Typically the term does not refer to application programs , such as spreadsheets or word processing , which are required to perform a task but not to make the system run .2)1.Design Elements3) In designing a computer system , architects consider five major elements that make up the system's hardware : the arithmetic /logic unit , control unit , memory , input , and output . The arithmetic /logic unit performs arithmetic and compares numerical values . The control unit directs the operation of the computer by taking the user instructions andtransforming them into electrical signals that the computer 's circuitry can understand . The combination of the arithmetic /logic unit and the control unit is called the central processing unit (CPU) . The memory stores instructions and data . The input input and output sections allow the computer to receive and send data , respectively .4) Different hardware architectures are required because of the specialized needs of systems and users . One user may need a system to display graphics extremely fast , while another system may have to be optimized for searching a database or conserving battery power in a laptop computer .5) In addition to the hardware design , the architects must consider what software programs will operate the system . Software , such as programming languages and operating systems , makes the details of the hardware architecture invisible to the user . For example , computers that use the C programming language or a UNIT operating system may appear the same from the user's viewpoint , although they use different hardware architectures .6)2.Processing Architecture7) When a computer carries out an instruction , it proceeds through five steps . First ,the control unit retrieves theinstruction from memory , for example , an instruction to add two numbers . Second , the control unit decodes the instruction into electronic signals that control the computer . Third , the control unit fetches the data (the two numbers) . Fourth , the arithmetic/logic unit performs the specific operation ( the addition of the two numbers ) . Fifth , the control unit saves the result ( the sum of the two numbers ) .8) Early computers used only simple instructions because the cost of electronic capable of carrying out complex instructions was high . As this cost decreased in the 1960s , more complicated instructions became possible . Complex instructions ( single instructions that specify multiple operations ) can save time because they make it unnecessary for the computer to retrieve additional instructions . For example , if seven operations are combined in one instruction , then six of the steps that fetch instructions are eliminated and the computer spends less time processing that operation . Computers that combine several instructions into a single operation are called complex instruction set computers ( CISC ) .9) However , most programs do not often use complexinstructions , but consist mostly of simple instructions . When these simple instructions are run on CISC architectures , they slow down processing because each instruction--whether simple or complex --takes longer to decode in a CISC design . An alternative strategy is to return to designs that use only simple , single--operation instruction sets and make the most frequently used operations faster in order to increase overall performance . Computers that follow this design are called reduced instruction set computers ( RISC ) .10) RISC designs are especially fast at the numerical computations required in science , graphics , and engineering applications . CISC designs are commonly used for non-numerical computations because they provide special instruction sets for handling character data , such as text in a word processing program . Specialized CISC architectures , called digital signal processors , exist to accelerate processing of digitized audio and video signals .11)3.Open and Closed Architectures12) The CPU of a computer is connected to memory and to the outside world by means of either an open or a closed architecture . An open architecture can be expanded after the system has been built , usually by adding extra circuitry ,such as a new microprocessor computer chip connected to the main system . The specifications of the circuitry are made public , allowing other companies to manufacture these expansion products .13) Closed architectures are usually employed in specialized computers that will not require expansion , for example , computers that control microwave ovens . Some computer manufacturers have used closed architectures so that their customers can purchase expansion circuitry only from them . This allows the manufacture to charge more and reduces the options for the consumer .14)work Architecture15) Computers communicate with other computers via networks . The simplest network is a direct connection between two computers . However , computers can also be connected over large networks , allowing users to exchange data , communicate via electronic mail , and share resources such as printers .16) Computers can be connected in several ways . In a ring configuration , data are transmitted along the ring and each computer in the ring examines this data to determine if it is the intended recipient . If the data are not intended fora particular computer , the computer passes the data to the next computer in the ring . This process is repeated until the data arrive at their intended destination . A ring network allows multiple messages to be carried simultaneously , but since each message is checked by each computer , data transmission is slowed .17) In a bus configuration , computers are connected througha single set of wires , called a bus . One computer sends data to another by broadcasting the address of the receive and the data over the bus . All the computers in the network look at the address simultaneously , and the intended recipient accepts the data . A bus network , unlike a ring network , allows data to be sent directly from one computer to another . However , only one computer at a time can transmit data . The others must wait to send their messages .18) In a star configuration , computers are linked to a central computer called a hub . A computer sends the address of the receiver and the data to the hub , which then links the sending and receiving computers directly . A star network allows multiple messages to be sent simultaneously , but it is more costly because it uses an additional computer , the hub , to direct the data .19)5.Recent Advances20) One problem in computer architecture is caused by the difference between the speed of the CPU and the speed at which memory supplies instructions and data . Modern CPUs can process instructions in 3 nanoseconds ( 3 billionths of a second ) . A typical memory access , however , takes 100 nanoseconds and each instruction may require multiple accesses . To compensate for this disparity , new computer chips have been designed that contain small memories , called caches , located near the CPU . Because of their proximity to the CPU and their small size , caches can supply instructions and data faster than normal memory . Cache memory stores the most frequently used instructions and data and can greatly increase efficiency .21) Although a large cache memory can hold more data , it also becomes slower .To compensate , computer architects employ designs with multiple caches . The design places the smallest and fastest cache nearest the CPU and locates a second large and slower cache farther away . This arrangement allows the CPU to operate on the most frequently accessed instructions and data at top speed and to slow down only slightly when accessing the secondary cache . Using separatecaches for instructions and data also allows the CPU to retrieve an instruction and data simultaneously .22) Anther strategy to increase speed and efficiency is the use of multiple arithmetic/logic units for simultaneous operations , called super scalar execution . In this design , instructions are acquired in groups . The control unit examines each group to see if it contains instructions that can be performed together . Some designs execute as many as six operations simultaneously . It is rare , however , to have this many instructions run together ,so on average the CPU does not achieve a six-fold increase in performance . 23) Multiple computers are sometimes combined into single systems called parallel processors . When a machine has more than one thousand arithmetic/logic units , it is said to be massively parallel . Such machines are used primarily for numerically intensive scientific and engineering computation .Parallel machines containing as many as sixteen thousand computers have been constructed .3-3 VLIW Microprocessors24) When Transmeta Corp. revealed its new Crusoe of processors last month ,experts weren’t surprised to learn that the chips are based on Very Long Instruction Word(VLIW)technology .VLIW has become the prevailing philosophy of microprocessor design , eclipsing older approaches such as RISC and complex instruction set computing(CISC) .25) All microprocessor designs seek better performance within the limitations of their contemporary technology. In the 70s of 20th century ,for example ,memory was measured in kilobytes and very expensive .CISC was the dominant approach because it conserved memory .26) In the CISC architecture . there can be hundreds of program instructions-simple commands that tell the system to add numbers, store values and display results. If all instructions were the same length , the simple ones would waste memory .Simple instructions require as little as 8 bits of storage space , while the most complex consume 120 bits .27) Variable-length instructions are more difficult for a chip to process, though, and the longer CISC instructions are especially complex. nonetheless ,to maintain software compatibility, modern chips such as Intel’s Pentium III and Advanced Micro Devices Inc.’s Athlon must still work with all troublesome CISC instructions that were designed in the 1980s , even though their original advantage-memory conservation-isn’t as important .28) In the 1980s , RAM chips got bigger and bigger in capacity while their prices dropped . The emphasis in CPU design shifted to relatively simple , fixed-length instructions , always 32 bits long .Although this wastes some memory by making programs bigger ,the instructions are easier and faster to execute .29) The simplicity of RISC also makes it easier to design superscalar processors-chips that can execute more than one instruction at a time .This is called instruction-level parallelism. Almost all modern RISC and CISC processors are superscalar. But achieving this capability introduced significant new levels of design complexity.30) VLIW chips can cost less , burn less power and achieve significantly higher performance than comparable RISC and CISC chips But there are always trade-offs. One is code expansion-programs grow larger , requiring more memory. Far more important , though , is that compilers must get smarter .A poor VLIW complier will have a much greater negative impact on performance than would a poor RISC or CISC compiler .31) VLIW isn’t a magic bullet , but it’s the new wave in microprocessor design .Within a few years , it’s certain that at least some of your software will be running on VLIW chips .单元3 电脑体系和微处理器3-1 电脑体系电脑体系,在电脑科技中,是一个依据整个或部分电脑结构的通用术语,这个术语也包含软件系统的设计,例如这个操作系统(控制电脑的程序),以及依据这个在电脑网络中连接主机的硬件和基本的软件的结合体。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Electronic power steering systemWhat it is?Electrically powered steering uses an electric motor to drive either the power steering hydraulic pump or the steering linkage directly. The power steering function is therefore independent of engine speed, resulting in significant energy savings.How it works?Conventional power steering systems use an engine accessory belt to drive the pump, providing pressurized fluid that operates a piston in the power steering gear or actuator to assist the driver.In electro-hydraulic steering, one electrically powered steering concept uses a high efficiency pump driven by an electric motor. Pump speed is regulated by an electric controller to vary pump pressure and flow, providing steering efforts tailored for different driving situations. The pump can be run at low speed or shut off to provide energy savings during straight ahead driving (which is most of the time in most world markets).Direct electric steering uses an electric motor attached to the steering rack via a gear mechanism (no pump or fluid). A variety of motor types and gear drives is possible. A microprocessor controls steering dynamics and driver effort. Inputs include vehicle speed and steering, wheel torque, angular position and turning rate.Working In Detail:A "steering sensor" is located on the input shaft where it enters the gearbox housing. The steering sensor is actually two sensors in one: a "torque sensor" that converts steering torque input and its direction into voltage signals, and a "rotation sensor" that converts the rotation speed and direction into voltage signals. An "interface" circuit that shares the same housing converts the signals from the torque sensor and rotation sensor into signals the control electronics can process. Inputs from the steering sensor are digested by a microprocessor control unit that alsomonitors input from the vehicle's speed sensor. The sensor inputs are then compared to determine how much power assist is required according to a preprogrammed "force map" in the control unit's memory. The control unit then sends out the appropriate command to the "power unit" which then supplies the electric motor with current. The motor pushes the rack to the right or left depending on which way the voltage flows (reversing the current reverses the direction the motor spins). Increasing the current to the motor increases the amount of power assist.The system has three operating modes: a "normal" control mode in which left or right power assist is provided in response to input from the steering torque and rotation sensor's inputs; a "return" control mode which is used to assist steering return after completing a turn; and a "damper" control mode that changes with vehicle speed to improve road feel and dampen kickback.If the steering wheel is turned and held in the full-lock position and steering assist reaches a maximum, the control unit reduces current to the electric motor to prevent an overload situation that might damage the motor. The control unit is also designed to protect the motor against voltage surges from a faulty alternator or charging problem.The electronic steering control unit is capable of self-diagnosing faults by monitoring the system's inputs and outputs, and the driving current of the electric motor. If a problem occurs, the control unit turns the system off by actuating a fail-safe relay in the power unit. This eliminates all power assist, causing the system to revert back to manual steering. A dash EPS warning light is also illuminated to alert the driver. To diagnose the problem, a technician jumps the terminals on the service check connector and reads out the trouble codes.Electric power steering systems promise weight reduction, fuel savings and package flexibility, at no cost penalty.Europe's high fuel prices and smaller vehicles make a fertile testbed for electric steering, a technology that promises automakers weight savings and fuel economy gains. And in a short time, electric steering will make it to the U.S., too. "It's just just a matter of time," says Aly Badawy, director of research and development for Delphi Saginaw SteeringSystems in Saginaw, Mich. "The issue was cost and that's behind us now. By 2002 here in the U.S. the cost of electric power steering will absolutely be a wash over hydraulic."Today, electric and hybrid-powered vehicles (EV), including Toyota's Prius and GM's EV-1, are the perfect domain for electric steering. But by 2010, a TRW Inc. internal study estimates that one out of every three cars produced in the world will be equipped with some form of electrically-assisted steering. The Cleveland-based supplier claims its new steering systems could improve fuel economy by up to 2 mpg, while enhancing handling. There are true bottom-line benefits as well for automakers by reducing overall costs and decreasing assembly time, since there's no need for pumps, hoses and fluids.Another claimed advantage is shortened development time. For instance, a Delphi group developed E-TUNE, a ride-and-handling software package that can be run off a laptop computer. "They can take that computer and plug it in, attach it to the controller and change all the handling parameters -- effort level, returnability, damping -- on the fly," Badawy says. "It used to take months." Delphi has one OEM customer that should start low-volume production in '99.Electric steering units are normally placed in one of three positions: column-drive, pinion-drive and rack-drive. Which system will become the norm is still unclear. Short term, OEMs will choose the steering system that is easiest to integrate into an existing platform. Obviously,greater potential comes from designing the system into an all-new platform. "We have all three designs under consideration," says Dr. Herman Strecker, group vice president of steering systems division at ZF in Schwaebisch Gmuend, Germany. "It's up to the market and OEMs which version finally will be used and manufactured." "The large manufacturers have all grabbed hold of what they consider a core technology," explains James Handy sides, TRW vice president, electrically assisted steering in Sterling Heights, Mich. His company offers a portfolio of electric steering systems (hybrid electric, rack-, pinion-, and column-drive). TRW originally concentrated on what it still believes is the purest engineering solution for electric steering--the rack-drive system. The system is sometimes refer to as direct drive orball/nut drive. Still, this winter TRW hedged its bet, forming a joint venture with LucasV arity. The British supplier received $50 million in exchange for its electric column-drive steering technology and as sets. Initial production of the column and pinion drive electric steering systems is expected to begin in Birmingham, England, in 2000.In 1995, according to Delphi, traditional hydraulic power steering systems were on 7596 of all vehicles sold globally. That 37-million vehicle pool consumes about 10 million gallons in hydraulic fluid that could be superfluous, if electric steering really takes off.The present invention relates to an electrically powered drive mechamsm for providing powered assistance to a vehicle steering mechanism. According to one aspect of the present invention, there is provided an electrically powered driven mechanism for providing powered assistance to a vehicle steering mechanism having a manually rotatable member for operating the steering mechanism, the drive mechanism including a torque sensor operable to sense torque being manually applied to the rotatable member, an electrically powered drive motor drivingly connected to the rotatable member and a controller which is arranged to control the speed and direction of rotation of the drive motor in response to signals received from the torque sensor, the torque sensor including a sensor shaft adapted for connection to the rotatable member to form an extension thereof so that torque is transmitted through said sensor shaft when the rotatable member is manually rotated and a strain gauge mounted on the sensor shaft for producing a signal indicative of the amount of torque being transmitted through said shaft. Preferably the sensor shaft is non-rotatably mounted at one axial end in a first coupling member and is non-rotatably mounted at its opposite axial end in a second coupling member, the first and second coupling members being inter-engaged to permit limited rotation there between so that torque under a predetermined limit is transmitted by the sensor shaft only and so that torque above said predetermined limit is transmitted through the first and second coupling members.Now, power steering systems of some cars have become the standard-setting, the whole world about half of the cars used to powersteering. With the development of automotive electronics technology, some cars have been using electric power steering gear, the car of the economy, power and mobility has improved. Electric power steering device on the car is a new power steering system device, developed rapidly in recent years both at home and abroad, because of its use of programmable electronic control devices, the flexibility in the same time there are also potential safety problems. In the analysis This unique product on the basis of the author of the characteristics of electronic control devices, security clearance just that the factors that deal with security measures, and discussed a number of concerns the safety of specific issues. The results show that : Existing standards can not meet the electric power steering device security needs and made the electric power steering device safety evaluation of the idea. Research work on the electric power steering device development and evaluation of reference value.电子动力转向系统电子动力转向系统是什么?电子动力转向系统是通过一个电动机来驱动动力方向盘液压泵或直接驱动转向联动装置。