结构振动的主动控制算法之线性二次型
双层隔振系统的主动最优控制

T eta se n to fo tu efr a c es sip tds r a c so tie . n lzn ea l d n e u n y h r frf cino u t rom n ev ru n u it b n ei ban d Bya ay igt mpi ea d f q e c n u p p u h u t r
壳 的振 动减 小 , 原理 相 当于 双层 隔振 系统 。然 其
线 性 二 次型 L Q控 制 算法 能够 通过 给 出所需 的最优 控 制 指 标 , 定 系 统 状 态变 量 和 控 制变 量 的加 权矩 确 阵, 以使 得 该 控 制 指 标 取 得 最 小值 。在 主 动 隔振
Ab ta t: n i e i g f r e t n misb l y a d t e ma n t d fa t ao u p t n o t a o to sa p id t sr c Co sd r o c r s s i i t n h g i e o c t ro t u ,a p i l nr li p l o a n a i u u m c e d u l - y rv b ai n i o ai n s s m . e r l t n h p b t e i h i g ma x n h e b c r x i a q ie . o b e l e i r t s lto y t a o e Th e ai s i e we n t weg t  ̄i a d t e f d a k ma s c u r d o he n e
a l d —r q e c h a trsi s mp i e fe u n y c a ce it u t r c
隔振 技术 在船 舶 振动 控制 上 已经 得 到广 泛 的应
控制方法
回路传函恢复控制
• 线性二次高斯(Linear Quadratic Gaussian—LQG)方法是 以最优线性二次型调节器(LQR)和Kalman滤波器为中心的 反馈控制系统优化设计方法。由于其理论比较成熟,所以 在工程上被广泛应用。但是由于LQG设计的被控对象没有 考虑模型不确定性,带有Kalman滤波器的LQG方法设计 的控制系统鲁棒性差,模型若存在微小偏差或扰动,闭环 系统就可能出现不稳定的现象。因此,为弥补LQG设计方 法的缺陷,1979年Doyle和Stein提出了回路传函恢复方法。 • LQG/LTR回路传函恢复方法是把虚拟的过程噪声作为设 计参数加到设计模型输入端的鲁棒性恢复方法,能使LQG 设计具有最优线性二次调节器LQR所具有的稳定储备。其 设计思想就是设计滤波器增益,使得全状态LQR调节器自 然拥有的鲁棒特性在系统的输入端通过动态调节器得到基 本恢复。根据LQG/LTR理论,回路传递恢复后的系统具 有接近最优反馈控制系统的鲁棒性。
1. 极点配置法:
yp
y1
y2
y3
A1 P1 Q1 i A Ps B P0
A2 P2 Q2
k1 m m1
k2
k3 m2
m3
Fd
1. 极点配置法:
液压源 加速度 信号输入 加速度 三状态 输入回路 速度 位移 伺服控 制电路 控制 信号 负载 伺服阀 与液压缸 加速度计 速度调理 位移计 振动台 位置 输出
鲁棒控制方法概述
鲁棒控制方法弥补现代控制理论对数学模型的过分依赖,在设计过程 中考虑了对象模型的不确定性,使得在一定误差范围内的所有被控对象均 能满足理想的性能要求。 在设计鲁棒控制器时,仍存在以下的问题需要解决 : 结构数学模型的不确定性估计较为困难,因此准确的分析和刻画不确定 性的大小是进行鲁棒控制器设计的基础。 在鲁棒控制器设计过程中,通常需要依靠权函数的选择来实现控制器对 不确定性的鲁棒性,一般情况下,这种权函数的选择是没有通用的公 式,因此要经过反复多次的试凑才能确定。 设计鲁棒控制器时,往往需要同时满足包括时域、频域在内的多个性能 指标要求。
压电智能结构振动控制的数值模拟

Nu e i a i u a i n o i r to o t o fpiz e e t i m a ts r c u e m r c lsm l to f v b a i n c n r lo e o lc r c s r t u t r
QI AN n 。 W ANG in g o Fe g Ja - u
钱
摘
锋 , 王建 国
200) 3 0 9
( 合肥工业大学 土木与水利工程学院, 安徽 合肥
要: 文章考虑了压 电传感器/ 激励器 的刚度和质 量对系统 的影 响 , 立 了压 电智能结构 的有限元动 力方 建
程; 采用三维八节点实体压 电耦合单元 , 运用 ANS S参数化语 言( P L 编写 了压 电智能结构振动 主动控制 Y AD) 的数值模拟程序 ; 研究 了系统在干扰荷载作用下 P、D和 PD控制器 的控制性能 , 析了不 同控制情况 下的 P 1 分
I to ain
0 引
口
p n v 馈和线 性二次 型 ( QR) uo 反 L 方法实现 了结构 在 冲击 、 简谐 和 任 意激 励 作用 下 的模 态 控 制 。文 献 [] 4 以有 限元 模态 分析 为基础 , 实现 了压 电悬 背 梁在状 态空 间形 式 下 的控制 。文献 [ ] 5 利用 一个 两质点 弹簧 系统验证 了利 用大型 商业有 限元软件
y i fa t evb ain c n r l f iz ee ti s r tu t r .Aciec n r l q a in r e ie y sso ci i rto o to e o lcrc ma tsr cu e v op t o to u to sa ed rv db v e t ed n mi q a in o ie rea tc pe o lcrc lmi ae tu t r . W i h h e — i n in l h y a c e u t fl a lsi iz ee ti a n t d sr cu e o n t t e t r edme so a h eg tn d o p e lme t h lm e tmo e fpe o lcrcs a tsr cu eh sb e e eo e y ih — o ec u ld ee n ,t eee n d l iz ee ti m r tu t r a e n d v lp d b o
第4章线性二次型最优控制
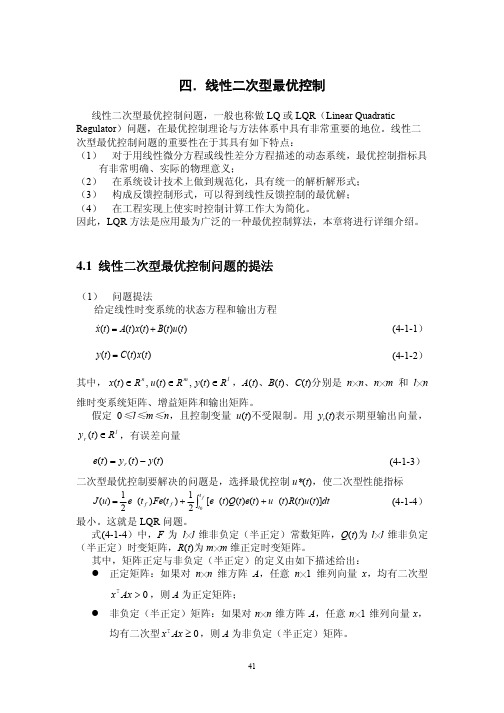
λ(t) = [Ω 22 (t f , t) − FΩ12 (t f , t)]−1[FΩ11 (t f , t) − Ω 21 (t f , t)]x(t)
此式表明λ(t)与 x(t)之间存在线性关系。令
λ(t) = P(t)x(t)
考虑Ω(tf ,tf)=I2n╳2n, 即
首先列出该问题的 Hamilton 函数
H
=
1 2
xT
(t)Q(t)x(t)
+
1 2
uT
(t)R(t)u(t)
+
λT [A(t)x(t)
+
B(t)u(t)]
(4-2-3)
因 u(t)不受约束,所以沿最优轨线有
∂H ∂u (t )
=
0
即
∂H ∂u(t)
=
R(t)u(t)
+
BT
(t )λ (t )
=
0
(4-2-4)
则取较小值。 z 若要减少各分量间的关联耦合作用,系数矩阵可不为对角线矩阵,只需
将在系数矩阵中对应关联分量位置的元素取为非零的正数,其大小也依
对消除各分量间关联的重视程度而定,即最优性能指标也可以用于解耦
控制设计。 z 当 Q、R 取为时变矩阵 Q(t)和 R(t)时,可以反映不同时间阶段的系统控
制要求。如当 t = t0 时 e(t)可能很大,但此时并不反映系统的控制性能, 可以将 Q(t)取得较小;当 t→ tf、e(t)减小时,为保证控制系统性能,可 以将 Q(t)逐渐取大。 二次型性能指标中系数矩阵 F、Q、R 的选取在最优控制理论中是受人为因 素影响最大的步骤,对同样的二次型最优控制问题,选取不同的 F、Q、R 所得 到的最优控制规律也是完全不一样的。 (4) 线性二次型最优控制问题的三种类型 依照系统(4-1-1)~(4-1-3)的情况不同,线性二次型最优控制问题可以分为 如下三类: I. 状态调节器问题 此时有 C(t) = I 为单位矩阵,yr(t) = 0,即有 y(t) = x(t) = -e(t) II. 输出调节器问题 此时有 yr(t) = 0,即有 y(t) = -e(t)。 III. 跟踪问题
线性二次型调节器算法对黏弹性阻尼器参数的优化设计

⑥
2 0 1 4 S c i . T e c h . E n g r g .
建 筑 技 术
线性二次型调节器算法对黏弹性阻尼器 参数 的优化设 计
邹 旭 岩 宋 荣 方
( 中州大学工程技术学院 , 郑州 4 5 0 0 4 4 )
摘 要
鉴于黏弹性阻尼 器( V E D ) 对结构减震控制 的局 限性 , 采用等效 刚度和 等效 阻尼 的力 学模型 , 对V E D的参数优化 问题
9期
邹 旭岩 , 等: 线性二次 型调 节器算法对黏 弹性 阻尼 器参 数的优化设计
2 3 7
式( 1 ) 中, 和 为 阻尼器 的相对 速度 和位 移 。
进行 了研究。基 于 L Q R的最优控 制算 法, 提 出一种 以 V E D控制 下结构 的振 动响应 去逼近最优 控制 下结构振 动响应 的 V E D 参数优化的新方法。通过对 一个加入 V E D的 3层混凝土框架结构进行 动力 响应数值分析 , 得 出结论 。方 法相对简 单, 所提 出 的V E D参数优化方法能够使结构动力响应得到有效的控制, 控制效果与采用最优控制算法的计算结果较为接 近, 验证 了该 方 法的有效性。利 用上述 方法优化 V E D参数, 对结 构进行振 动控制 , 虽然 无法达到全 状态最 优增 益反馈控制 力 的主动控制 效 果, 但经过优化后 的动力反应逼近最优控 制算法的结果。该 方法为 V E D在 结构减震控 制方面取得 更好 的减震效 果提供 了理
第1 4卷
第 9期
2 0 1 4年 3月
科
学
技
术
与
工
程
Vo 1 . 1 4 No . 9 Ma r .2 01 4
振动控制-主动、半主动

振动控制-主动、半主动⽬录0.前⾔ (1)0.1 结构振动控制研究与应⽤概况 (1)1.结构振动主动控制、半主动控制 (2)2.结构振动控制分类 (3)3.各类控制系统构造及性能 (4)3.1 结构振动主动控制概述 (4)3.1.1 主动控制控制原理 (5)3.1.2 加⼒⽅式及加⼒位置 (7)3.1.3 控制装置 (8)3.2 结构振动半主动控制概述 (8)4.结构振动主动控制、半主动控制算法 (11)4.1 主动控制算法 (12)4.1.2 ⼏种算法的简单介绍 (13)4.2 半主动控制算法 (21)4.3 智能控制算法 (22)5.结构主动、半主动控制系统分析⽅法及设计⽅法 (24)5.1 主动控制系统的最优控制⼒设计与分析 (25)5.1.1 主动控制系统的最优控制⼒设计 (25)5.1.2 主动最优控制⼒和受控反应特征分析 (26)5.2 结构主动变阻尼和智能阻尼控制系统的最优控制⼒设计与分析 (30) 5.2.1半主动最优控制⼒设计 (31)5.2.2系统反应分析 (36)5.3 结构主动变刚度控制系统的最优控制⼒设计与分析 (37)5.3.1主动变刚度最优控制⼒设计 (37)5.3.2系统反应分析 (40)6.结构振动主动控制、半主动控制系统的⼯程应⽤ (41)6.1 AMD控制系统的⼯程应⽤ (41)6.2 结构主动变刚度控制系统的⼯程应⽤ (41)6.3 结构主动变阻尼控制系统的⼯程应⽤ (42)6.4 其他结构振动控制系统的⼯程应⽤ (42)7.研究展望 (43)7.1 结构振动主动控制、半主动控制的研究与发展⽅向 (43)7.2 结构振动控制的有待研究的问题 (43)8.结语 (43)参考⽂献 (44)主动控制、半主动控制综述0.前⾔0.1 结构振动控制研究与应⽤概况结构振动控制技术与传统的依靠结构⾃⾝强度、刚度和延性来抵抗地震作⽤的做法不同,通过在结构中安装各种控制装置,从⽽达到减⼩结构地震反应、保障结构地震安全的⽬的。
柔性悬臂梁振动主动控制研究
柔 性 悬 臂 梁 振 动 主 动 控 制 研 究
赵冬冬
摘
张京 军 王 二 成
要: 采用压 电材料作为传感器和致动器 , 建立 了机 电耦合 的压 电智能梁动 力学方程 , 采用基于 线性 二次型( Q 最 L R)
优控制 的独立模 态控制方法对智能梁振 动进行抑制 , 以有效抑制压电悬臂梁的振动。 关键词 : 智能结构 , 动主动控制 , 态控制 振 模 中 图分 类 号 : U32 1 T 5 .
文献 标 识 码 : A
近年来 , 随着科 学技术 的进步 , 特别是航 空 、 天 、 航 机器人 技
需要解决 的问题之 一。智能结 构技术 为这一 问题 的解决 开拓 丁
一
不考虑结构阻尼, 压电致动器施加电压后, 智能梁振动方程
术的发展 , 柔性结构的振动控制 已经 成为人们研究 的热点 和迫 切 如 下 :
2 模 型简化
将挠度展开成模态叠加形式 :
训 z£=∑ () £ (, ) ( )
( 5 )
( ) 式 中: ( ——第 i 1 ) 阶简正模 态函数 ; 式中 : ,D} { } { ——分别 为应力 、 { { ,e ,E} } 电位 移 、 应变及 电场 强 7( ) / t——第 i阶模态坐标 。 i 度 向量 ; 将式( ) 5 代人式 ( ) 3 中传感方程变为 : [ ] [ ][ ——分别为压电材料弹性 系数 阵、 电系数 阵 C ,e , ] 压
个 崭新 的领域 。压 电材料 由于具有正 、 逆压 电效应 , 反应 快 , 致
a A) (
+ E(  ̄E ) a I
“ ( )H( £( ) 一H( z
]
)] ) () 4
柔性机械臂振动的线性二次型最优控制

第3卷 第3 7 期
、 17 , . No 3 o3 .
河
北
工
业
大
学
学
报
20 0 8年 6月
Jn 0 8 u e2 0
J 0URN ^ BE 1 0F HE IUNI VERS Ty 0F T CHN0L I E 0GY
究中 [ . 2 - 4 1 本 文针对在水 平面 内转动的单杆柔性 机械臂 , 先采用假设模态法和 L gag 方程推导出柔性臂的 首 arne
动力学模 型 ; 并在此基础上给 出其面 向控制器设计 的数学 模型 ; 然后设计线性二次型最优调节器 (Q ) L R, 以达到抑制柔性臂末端残余 振动的 目的 ;最后对 柔性机械臂线性二次型最优控 制的效果进行 仿真验 证.
收稿 日期 : 0 8 1 0 20— - 02
基金项 目:天津 市高等学 校科技 发展基 金计划项 目 ( 0Z 0;2010) 2 6 Y 9 0413 0 作者简 介:李坤 (93) 18.,男 ( 汉族 ) ,硕士生 .
维普资讯 第3 期 Fra bibliotek文章 编号 :10 -3 3(0 8 30 3 .5 0 82 7 2 0 )0 .0 80
柔性机械 臂振 动的线 性二次型最优控制
李 坤 ,炱今天
( 天津工 业大学 机械 电子学 院 ,天 津 306 ) 010
摘要 为抑 制柔性机械臂 的弹・振动 ,提 高定位精度 ,推 导 出单杆 柔性机械臂 的动 力学模型并对其进行线性化, 陛 针对 线・ 的系统模型 , 洼化 采用线性二次型最优调 节器对柔性机械臂末端残余振动进行控 制, 仿真 结果表 明调节 器
抑振作 用明显.
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
(2.3)
Z (t ) AZ (t ) BU (t ) DF (t )
其中:
Z (t0 ) Z 0
(2.4)
On A 1 M K
On p B 1 M Bs
M C 2 n2 n In
1
2 n p
Onr D 1 M Ds 2 nr
1.2.2 结构控制系统状态向量和最优控制力
, R I
使用 Matlab 软件中 lsim 函数计算连续状态方程的状态向量 Z(t),如下式。
[ y0 , Z ] lism(( A BG), D, C0 , D0 , x g , T )
(2.6)
其中,权矩阵 C0 和 D0 为观测输出矩阵;因 LQR 控制算法是全状态反馈,故此 C0 和 D0 分别取为单位 矩阵和零矩阵;T 是地震作用时间向量,包括采样时间步长和总持续时间;y0 是输出向量,针对 LQR 算法, 它与状态向量 Z 相同。 将式(2.6)解得的状态向量 Z,代入下式,可求得最优控制力 U,即 (2.7) U GZ ' 将状态向量 Z 和式(2.7)代入式(2.7)得下式
0 引言
在地震区的多层建筑中,采用主动控制方式来减小地震对结构的不利作用,通过前人大量的理论和试 验研究,事实证明 LQR 最优控制对减小地震作用的效果是明显的。为了得到最优的控制效果,分别选用不 同的权矩阵 Q 和 R 进行计算,并加以比较,说明控制规律。本文先通过 LQR 最优控制理论,列出连续时间 状态方程,并给出求解方法;再用一个五层框架结构的算例,用该方法求出结构的层间位移、加速度和控 制力,以及有控结构的阻尼和频率特性,与无控情况下结构的动力响应进行比较,得出了相关结论。
M X (t ) C X (t ) KX (t ) Ds F (t ) BsU (t )
定义系统(2.2)的状态向量 Z(t)
(2.2)
X n1 Z (t ) X n1
在状态空间中,有方程(2.2)描述的受控结构系统可以用如下状态方程描述:
%% LQR 控制算法的结构振动控制算例 %% M=4*10^5*eye(5);%% 质量矩阵 K=10^8*[4 -2 0 0 0;-2 4 -2 0 0;0 -2 4 -2 0;0 0 -2 4 -2;0 0 0 -2 2];%% 刚度矩阵 [V,R0]=eig(inv(M)*K);%% 特征向量(阵型)和特征值(自振频率) %% 用循环体来实现归一化 R1=diag(R0);w_eig=sqrt(R1); for j=1:5 for i=1:5 V(i,j)=V(i,j)/V(5,j); end end %% 确定 Rayleigh 阻尼 ypxl1=0.05;ypxl2=0.05; a=2*w_eig(1)*w_eig(2)*(ypxl1*w_eig(2)-ypxl2*w_eig(1))/(w_eig(2)^2-w_eig(1)^2); b=2*(ypxl2*w_eig(2)-ypxl1*w_eig(1))/(w_eig(2)^2-w_eig(1)^2); C=a*M+b*K; %% 设置主动控制装置,控制力矩阵 U=[u1 u2 u3 u4 u5]'和其位置矩阵 B Bs=[1 -1 0 0 0;0 1 -1 0 0;0 0 1 -1 0;0 0 0 1 -1;0 0 0 0 1]; %% 状态方程 DZ=AZ+BU+D^2Xg 和 Z(0)=0 %% %% Z=[x1 x2 x3 x4 x5 dx1 dx2 dx3 dx4 dx5]' %% A=[zeros(5) eye(5);-inv(M)*K -inv(M)*C]; B=[zeros(5);inv(M)*Bs]; D=[zeros(5,1);-inv(M)*M*ones(5,1)]; %% LQR 控制算法(线性二次型最优控制) %% 设置控制参数,权矩阵 Q 和 R,它们决定了控制力和结构反应的大小 %% erfa=[100 50 53.3]; for i=1:3 Q=erfa(i)*[K zeros(5);zeros(5) M]; switch i case 1, Q1=Q; case 2, Q2=Q; case 3, Q3=Q; otherwise, a1=Q; end end
eig( A BG) a ia 1 2
(2.9)
式中, a 和 分别是结构控制系统的频率和总阻尼比(无控结构和有空结构附加阻尼比之和) 。 由特征值表达式(2.9)的实部和虚部可求得受控结构的频率和阻尼比。
2
4 算例
设某五层钢筋混凝土框架结构,结构层质量都为 m=400000kg,每层刚度都为 k=200000kN/m,结构阻 尼矩阵按 Rayleigh 阻尼由前二阶振型阻尼比确定,即 C=aM+bK(α和β由前二阶振型阻尼比确定) 。取前二阶 振型阻尼比ξ1=ξ2=0.05。外界干扰为 EL Centro(NS,1940)地震波,输入峰值为 200Gal。取 F ( t ) x g ,地 震作用位置矩阵 D S M {1} ,{1}表示为元素均为 1 的列向量。本算例用来说明 LQR 算法设计主动控制 力的步骤,并讨论控制参数对结构控制系统反应、控制力和动力特性的影响规律。
3 主动控制系统的阻尼和频率特性
LQR 控制算法是状态反馈控制器,具有形式 U GZ [ K G CG ][ X
T
X T ]。由此可以看出,LQR
设计的控制力以弹性力和阻尼力施加在结构上,导致结构的频率和阻尼发生变化。以下仍以上述控制参数 来讨论 LQR 控制算法确定的控制力对受控结构频率和阻尼的影响。 使用 Matlab 软件中 eig 函数计算结构控制系统的特征值,如下式:
3
表 1.1 结构地震最大反应和控制力(LQR 算法) 最大层间位移(cm) 工况 1 无控 β α (× 10^6) 0.01 0.1 0.5 1 100 3 5 8 12 15 50 53.3 4 8 0.14 0.38 0.58 0.63 0.90 1.05 1.25 1.44 1.56 1.25 1.56 0.10 0.28 0.48 0.56 0.84 0.98 1.08 1.19 1.29 1.08 1.29 0.08 0.21 0.37 0.48 0.71 0.87 1.01 1.07 1.05 1.01 1.05 0.05 0.13 0.27 0.36 0.52 0.64 0.76 0.85 0.90 0.76 0.90 0.02 0.06 0.13 0.18 0.27 0.34 0.40 0.45 0.48 0.40 0.48 0.77 1.46 1.86 1.96 2.23 2.39 2.52 2.61 2.66 2.52 2.66 1.21 2.04 2.48 2.65 2.73 2.73 2.92 3.07 3.14 2.92 3.14 1.46 2.31 2.89 2.97 2.86 2.75 2.77 2.93 3.02 2.77 3.02 1.60 2.46 3.06 3.06 2.81 2.71 2.68 2.72 2.78 2.68 2.78 1.66 2.57 3.12 3.08 2.81 2.77 2.76 2.86 3.00 2.76 3.00 3813 3403 2678 2213 1480 1169 918 731 640 918 640 3083 2848 2313 1969 1340 1065 840 670 587 840 587 2328 2194 1838 1579 1088 874 697 560 492 697 492 1559 1485 1268 1095 771 625 499 401 368 499 368 781 749 746 560 400 325 260 218 202 260 202 2.79 2 2.43 3 1.91 4 1.28 5 0.65 1 2.93 2 3.68 3 4.23 4 4.48 5 5.04 1 2 3 4 5 最大加速度(m/s^2) 最大控制力(kN)
1 连续时间状态方程及其解
1.1 状态方程 n 各自由度的土木工程结构在环境干扰 F(t)作用下的运动方程可以表示为
M X (t ) C X (t ) KX (t ) Ds F (t )
X (t0 ) X 0
X (t0 ) X 0
(2.1)
其中:X 是位移向量;M、C 和 K 分别是结构的质量、阻尼和刚度矩阵;Ds 是环境干扰位置矩阵;方 程的后两项是初始位移向量和初始速度向量。 为控制结构反应,在结构上安装 p 个控制装置,主动作动器通过拉索给结构提供的控制力 U(t),相应 的位置矩阵为 Bs,于是受控结构运动方程表示为
图 1-2 结构首层最大位移反应和最大控制力与β的关系(α=100)
4
(a)位移
(b)控制力 图 1-3 结构第一层位移反应和控制力时程曲线(α=100,β=8×10^-6)
5
4.2 LQR 控制系统的阻尼和频率特性 由特征值表达式(2.9)的实部和虚部可求得受控结构的频率和附加阻尼比,其第一振型频率与无控结 构第一频率比的值,以及其附加阻尼比见表 1.2 。
频率比 a1 / 1 附加阻尼 a1
从表 1.2 可以看出,当β较小时,受控结构的频率和附加阻尼比与无控结构相比明显增大;但β 取较大 值时(β>3×10^-6) ,随β 的增大,受控结构的频率几乎不变,阻尼比减小,但均给结构增加了阻尼比。因 此,LQR 控制算法这几的主动控制力主要以阻尼力的形式施加在结构上。
-1 1 0 0 0
0 -1 1 0 0
0 0 0 -1 0 1 - 1 0 1 0
(2.12)
受控结构系统状态方程描述如下: