基于RecurDyn和MATLAB的链传动仿真系统
基于RecurDyn的同步带间歇传动的动态性能研究
文章 编 号 :0 05 1 (0 2 0 0 50 10 —8 1 2 1 )50 8 3
基 于 R cr y eu D n的 同步 带 间歇 传 动 的 动 态 性 能 研 究
葛 正 浩 ,马 志平 ,张 凯 凯 ,梁 金 生
( 西科技大学 机电工程学院 , 陕 陕西 西 安 7 0 2 ) 1 0 1
传 统 的传动 装 置 , 般 为链 传 动 或 带传 动 , 一 其
中链传 动 由于多 边 形效 应 而 使 链 条在 链 轮 上 产 生
不均 匀起伏 , 成 主从 动 轮 的非 同步 , 而 影 响 了 造 从
传动 的精 度 ; 带传 动 由于在 传动 过程 中存在 着不 可 避免 的弹性 滑动 . 因此 , 当前 现有 的传 动装 置 , 般 一 不能 提供精 确 的 间歇 、 度传 动 , 分 且存 在 较 大 的噪
声和不 稳定 性[. 1 ]
R c r n对 虚拟样 机 进 行 动态 仿 真 , 论 证 该 装 e uDy 为
置 的 可 行 性 与 实 用 性 提 供 了参 考 . 1 同 步 带 间歇 传 动 装 置 的 设 计 与 建 模 利 用 ReuDy c r n软 件 对 该 模 型 进 行 虚 拟 样 机 建模 , 图 1 示 . 如 所
a e o a ne r bt i d,w hih pr v d s r f r n ef rt u t r r s a c fs c on us b l i t r i— c o i e e e e c o he f r he e e r h o yn hr o e t n e m t t ntdrv . e i e Ke r s: y hr no e t d na i n l i y wo d s nc o us b l ; y m c a a yss;i t r it n rv n e m te t d i e;R e u D y cr n
基于RecurDyn和Simulink的电传动车辆转矩控制策略
2 履带车辆样机模型构建
性提供给车辆行驶不同的法向力 、牵引力和滚动阻 力 。到目前为止 , 尽管车辆地面力学已经取得了很 大的进展 ,但描述地面与车辆相互关系的参量一般 还是采用公认的地面滚动阻力系数 f 、地面附着系 数 φ及地面转向阻力系数μ。本虚拟样机路面模型 充分利用一般的试验统计数据 , 针对仿真需要 , 在 RecurDyn/ HM 模块中定义了水平硬质地面 ,地面附 着系数 φ为 017 , 转向阻力系数 μ 为 0149 , 滚动阻 力系数 f 为 0105[4 ] 。整车动力学模型及路面模型 如图 2 所示 。
或者转速实现[2 ] 。由于车辆的直线行驶稳定性和 转向行驶性能完全依赖于控制策略的优劣 ,因此 ,准 确与实时的控制策略是车辆良好行驶的前提 。
图 1 电传动履带车辆结构框图 Fig. 1 Configuration of t he electric drive tracked vehicle
213 电动机及其控制系统模型 本文研究重点不是电动机驱动系统 , 从工程应
用的角度考虑 ,利用电动机驱动系统试验数据在控 制软件 Simulink 中建立 Look2Up Table 模块 , 利用 查表功能实现驱动系统的响应过程 , 因电动机转动 惯量与整车惯量相比较小 , 对整车动态性能的影响 可以忽略[5 ] 。仿真模型如图 3 所示 。
立的驱动电动机控制系统模型 ,构建了整车虚拟样机 ;分析和建立了转矩控制策略 ,对驾驶员信号进行了解析 ,利
用 Stateflow 建立了控制逻辑 ;在此虚拟样机基础上利用联合仿真的方法对转矩策略进行了仿真和样机试验 ,验证
了转矩控制策略方法的正确性 。
关键词 : 履带车辆 电传动 控制策略 RecurDyn Matlab/ Simulink
分布式电驱动履带车辆性能仿真研究
195电力电子Power Electronic电子技术与软件工程Electronic Technology & Software Engineering●基金项目:国防科技创新工程项目;项目编号:12050005。
1 引言混合动力电驱动履带车辆由于其采用了发动机-发电机组、动力电池和超级电容供电,具备良好的机动性能、静音行驶能力、灵活的空间布置以及较低的燃油消耗等优势,同时可以为电磁炮、激光武器、电装甲等新型装备的应用提供可靠的用电保障,逐渐成为了未来履带车辆的重要研究发展方向[1-2]。
为满足车辆转向、爬坡以及高速行驶需求,履带车辆双侧独立电驱动方案对驱动电机的功率密度、峰值扭矩和调速范围具有较高的要求[3],为降低驱动电机的设计难度,本文提出了一种新型的分布式电驱动履带车辆结构方案,该方案采用主动轮和负重轮协同驱动车辆行驶。
根据车辆的性能指标对电驱动系统各部件进行了参数匹配,并对匹配结果进行了机电联合仿真校验。
2 分布式电驱动履带车辆方案设计以某型履带装甲底盘为基础,开展分布式电驱动履带车辆方案设计。
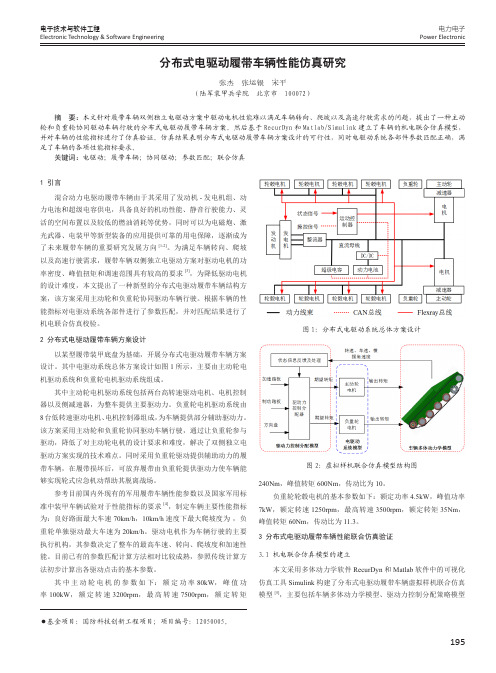
其中电驱动系统总体方案设计如图1所示,主要由主动轮电机驱动系统和负重轮电机驱动系统组成。
其中主动轮电机驱动系统包括两台高转速驱动电机、电机控制器以及侧减速器,为整车提供主要驱动力。
负重轮电机驱动系统由8台低转速驱动电机、电机控制器组成,为车辆提供部分辅助驱动力。
该方案采用主动轮和负重轮协同驱动车辆行驶,通过让负重轮参与驱动,降低了对主动轮电机的设计要求和难度,解决了双侧独立电驱动方案实现的技术难点。
同时采用负重轮驱动提供辅助动力的履带车辆,在履带损坏后,可放弃履带由负重轮提供驱动力使车辆能够实现轮式应急机动帮助其脱离战场。
参考目前国内外现有的军用履带车辆性能参数以及国家军用标准中装甲车辆试验对于性能指标的要求[4],制定车辆主要性能指标为:良好路面最大车速70km/h ,10km/h 速度下最大爬坡度为 ,负重轮单独驱动最大车速为20km/h 。
基于RecurDyn软件的偏心链轮、带传动等柔性传动分析
61科技资讯 S CI EN CE & T EC HNO LO GY I NF OR MA TI ON 工 程 技 术带传动、链传动等柔性传动广泛地应用于机械动力传动。
带传动主要应用在高速传动中,能够对缓和载荷冲击、过载保护起到良好的作用;链传动适用于中低速、对传动比要求较高的传动。
但柔性传动也存在自身的弊端,主要体现在柔性件受力的波动性,交变力对柔性件的疲劳、寿命有着重要的影响,因此,通过软件研究柔性体中的运动、力学问题对实际生产有着重要的指导意义。
Solidworks、Proe等常用软件有动力学等仿真功能,但只适用于刚性零部件;Ad am s软件有着强大的仿真功能,但必须导入Solidworks模型或重建模型,同时链条对装配、约束有着较高的要求。
多体动力学软件RecurDyn可以为链传动、带传动等柔性传动系统仿真提供便捷的方法。
1 RecurDyn软件简介RecurDyn软件(以下简称R软件)是由韩国FunctionBay公司开发出的多体系统动力学仿真软件,它采用相对坐标系运动方程理论和完全递归算法,适合于求解大规模的多体系统动力学问题。
R软件最大的特点是模块化,如:建模模块、铰链模块、力模块等,SubSystem选项中提供了链、带等零件模块及装配模块,用户通过点击所需零件再输入相关参数就可以快速生成零件模型,装配时,点击装配模块再选中零件即可;需要动力仿真时,首先在Joint模块中选择旋转、移动、螺旋等运动副,添加到零件中即可,然后在Database栏中Joint下的运动副上单击右键,选择Prop-erty选项,为运动副添加驱动力或力矩。
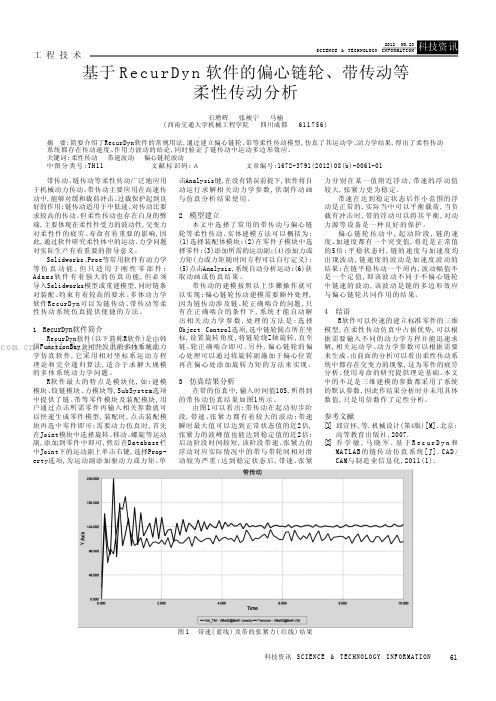
单击Analysis键,在没有错误前提下,软件将自动运行求解相关动力学参数,供制作动画与仿真分析结果使用。
2 模型建立本文中选择了常用的带传动与偏心链轮等柔性传动。
实体建模方法可以概括为:(1)选择装配体模块;(2)在零件子模块中选择零件;(3)添加所需的运动副;(4)添加力或力矩(力或力矩随时间方程可以自行定义);(5)点击Analysis,系统自动分析运动;(6)获取动画或仿真结果。
齿轮仿真耦合实验报告(3篇)
第1篇一、实验背景齿轮作为机械传动系统中的重要组成部分,其性能直接影响着整个系统的效率和寿命。
为了提高齿轮设计的准确性和可靠性,本研究采用有限元分析(FEA)和刚柔耦合动力学仿真(Rigid-Flexibility Coupling)方法,对齿轮进行仿真耦合实验,以评估齿轮在实际工作条件下的力学行为和性能。
二、实验目的1. 建立齿轮的有限元模型,并进行网格划分。
2. 通过有限元分析,计算齿轮在静态载荷作用下的应力分布和变形情况。
3. 利用刚柔耦合动力学仿真,模拟齿轮在实际工作条件下的动态响应。
4. 分析齿轮的疲劳寿命和强度性能,为齿轮设计和优化提供理论依据。
三、实验方法1. 有限元模型建立与网格划分首先,根据齿轮的实际尺寸和材料属性,建立齿轮的几何模型。
然后,采用四面体网格对齿轮进行网格划分,确保网格质量满足仿真要求。
2. 静态载荷下的有限元分析在有限元分析中,将齿轮置于静态载荷作用下,通过求解非线性方程组,得到齿轮的应力分布和变形情况。
主要关注齿轮的齿面接触应力、齿根应力、齿面磨损和齿面疲劳寿命。
3. 刚柔耦合动力学仿真为了模拟齿轮在实际工作条件下的动态响应,采用刚柔耦合动力学仿真方法。
将齿轮视为柔性体,同时考虑齿轮与轴承、轴等部件的相互作用。
通过施加转速和扭矩等激励,模拟齿轮在旋转过程中的动态响应。
4. 疲劳寿命和强度性能分析在仿真过程中,对齿轮的疲劳寿命和强度性能进行分析。
通过计算齿面接触应力、齿根应力等参数,评估齿轮的疲劳寿命和强度性能。
四、实验结果与分析1. 静态载荷下的应力分布和变形通过有限元分析,得到齿轮在静态载荷作用下的应力分布和变形情况。
结果表明,齿轮的齿面接触应力主要集中在齿根附近,齿根应力较大。
同时,齿轮的变形主要集中在齿面和齿根处。
2. 刚柔耦合动力学仿真结果通过刚柔耦合动力学仿真,模拟齿轮在实际工作条件下的动态响应。
结果表明,齿轮的齿面接触应力、齿根应力等参数在旋转过程中发生变化,但总体上满足设计要求。
recurdyn常用函数

recurdyn常用函数
recurdyn是一个用于模拟和分析递归动态系统的MATLAB 工具箱。
它提供了一组函数来帮助用户创建、分析和可视化递归动态系统的行为。
以下是一些常用的recurdyn函数:
1.rdyn: 这是创建递归动态系统的基本函数。
它允许用户定义系统的状态方程、初
始条件和参数。
2.step: 该函数用于模拟递归动态系统的瞬态响应。
它会在每个时间步长上更新系
统的状态,并返回模拟结果。
3.bode: 该函数用于计算并绘制递归动态系统的频率响应。
它返回系统的频率响应
数据,并生成相应的频谱图。
4.nyquist: 该函数用于计算并绘制递归动态系统的Nyquist图。
它基于系统的传
递函数或状态方程来计算系统的Nyquist曲线,并生成相应的图像。
5.margin: 该函数用于计算并绘制递归动态系统的稳定性边界。
它返回系统的稳定
性和鲁棒性边界,并生成相应的图像。
6.simulink: 该函数允许用户将recurdyn系统嵌入到MATLAB Simulink 模型
中,以便进行仿真和分析。
这些函数只是recurdyn工具箱中的一部分,还有许多其他功能和函数可用于模拟和分析不同类型的递归动态系统。
建议查阅MATLAB 的官方文档以获取更详细的信息和示例代码。
RecurDyn轴承仿真解决方案——新一代虚拟样机系统软件RecurDyn在轴承仿真中的应用
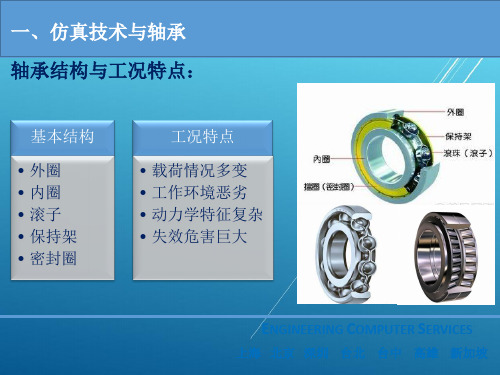
基本结构
• 外圈 • 内圈 • 滚子 • 保持架 • 密封圈
工况特点
• 载荷情况多变 • 工作环境恶劣 • 动力学特征复杂 • 失效危害巨大
ENGINEERING COMPUTER SERVICES
上海 北京 深圳 台北 台中 高雄 新加坡
一、仿真技术与轴承 常见的轴承故障模式举例分析:
上海 北京 深圳 台北 台中 高雄 新加坡
二、RecurDyn与轴承仿真 RecurDyn的轴承仿真方案:
• 所有动力学问题 • 部分有限元问题 • 疲劳问题
MFBD
(FEA)
• 特定时间点静力 学分析
• 特定时间段瞬态 动力学
RecurDyn可同时求解非线性有 限元和多体动力学矩阵,引领 动力学仿真进入了新的时代!
❖ 结合世界各地一流专家共同研发新一代多刚 柔体动力学的计算核心; 目前共有全球7所大学共10个研究实验室共 同参与研究。
❖ 全球市场布局遍及五大洲,目前的在美国、 德国、日本、中国、韩国印度等设有研发中 心。
❖ R Recursive 递归算法 ❖ D Dynamics 动力学
世界第一使用全节点有限元法的 MFBD(多柔性体动力学)分析软件
ENGINEERING COMPUTER SERVICES
上海 北京 深圳 台北 台中 高雄 新加坡
三、RecurDyn轴承仿真方案实例 RecurDyn的轴承行业客户:
ENGINEERING COMPUTER SERVICES
上海 北京 深圳 台北 台中 高雄 新加坡
三、RecurDyn轴承仿真方案实例 RecurDyn在INA:
专业轴承模块帮助您快速建立系统级虚拟样机中 的轴承仿真模型 堪称CAE软件界最友好的用户界面让学习和使用不再 困难
履带车辆动力学建模与仿真技术概述
履带车辆动力学建模与仿真技术概述杨福威;董震;朱强【摘要】履带车辆动力学模型的建立是进行动力学分析、车辆参数设计、车辆结构优化不可或缺的一步.为了能够对履带车辆动力学建模和仿真方法具有明确的了解和认识,对履带车辆的地面力学模型、平稳性模型、转向动力学模型的发展历程和一些典型建模方法进行介绍.并介绍了车辆动力学常用仿真软件的使用方法和一些仿真思路,对履带车辆仿真的几项关键仿真技术进行了分析.【期刊名称】《农业装备与车辆工程》【年(卷),期】2018(056)006【总页数】5页(P22-26)【关键词】履带车辆;多体动力学;建模;仿真【作者】杨福威;董震;朱强【作者单位】100072北京市中国北方车辆研究所;100072北京市装甲兵工程学院;300161天津市军事交通学院【正文语种】中文【中图分类】U469.6+94;TJ81+0.10 引言履带车辆具有接地比压小、附着性能高、稳定性能好、防护性能强等优点,被广泛运用于农业、建筑、采矿,尤其是军事领域中。
在履带车辆出现后的很长一段时间内,由于人们缺乏路面特性的认识和对地面力学的研究,履带车辆的设计往往采用“经验+试验”的方法,这就会增加研制成本和周期。
地面力学和计算机仿真技术的发展和完善为履带车辆的研究开发带来了以下变化:(1)根据土壤力学理论和压力-沉陷关系建立道路模型,能够预估履带车辆在不同地面的受力情况。
在硬质路面上,履带与地面是通过接触碰撞产生作用力的,根据地面刚度、阻尼、接触前后的变形量求得接触力。
在松软路面上,基于Bekker理论定义路面,认为土壤具有“记忆”功能,要考虑加载历史[1],每一块履带板与地面之间都会产生广义力。
Janosi和Hanamoto[2]提出了剪切应力和剪切变形的关系模型。
履带与地面之间的相互作用力是履带齿片与地面之间的剪切应力。
(2)将履带车辆视为一个复杂的多刚体系统或刚柔耦合系统。
多刚体系统动力学将系统构件视为不可变形的刚体,研究刚体在外力作用下的运动规律。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
个重要 方向。 目前 ,在该领域 的研究一般采用在三维建模软 数化设计的要求。
3I  ̄ A3软 件介 绍 .LTLd V
件 ( 1 r/ N I E R)中进行链轮和链节 的三维实体建模 ,之  ̄ PoE G N E 3 后再导入A M 软件进 行仿真分析。但是这一过程造成 了工作 S D A
性。 因此要 充分分析 链传 动的运动 学和动 力学 ,可 以采 用计 在R C D n e u y 软件中 ,链 传动部分 的链节 、主动轮和从动 r
算机仿真来进行。
2ReuD n 件 介 绍 . cry软 R c r y 软 件是 由韩 国 F n to B y 司基 于递 归算 法 开 euD n u c in a 公
—
一 . √
《 二●
2 传 动 系统 虚拟 样机 的组 成 . 链
虚拟样机技术 ( it a rtt pn ,V 是一种基于产 Vru lPo oy ig P) 品计 算机仿 真模 型的数字 化设计 方法 。以机械 系统 运动学 、 多体 动 力学 、有 限元分析 和控 制理论 为核心 ,加上 成熟 的三
5 C D C M与制造业信 息化 ・w n v . m.n 2 A /A ww i o oc c d o
栏 目主持 :黎 艳 投 稿 信 箱 : L @in v . m. i d o oc c y o n
(续 )
滚 子 直 径D 链 节 数 链轮 直 径d
1.5mm 1 0 8 9 3 .4 m1 83 4r i
2 1 3 0
3 .4 83 4mm 60nm 0 1 I0 0 - 2 S 6 6 1A l.5 1 90 m n
理 论和完 全递 归算法 ,非常适 合求解 大规模 以及复 杂接触 的 多体 动力学 问题 。而且其所 开发 的成型 的模型库 ,如齿轮 、
履带以及 与C D A 软件 的接 口,为仿真研究提供 了全方位支持 。 从另外一 个方 面来看 ,传统 的动 力学 分析软件 对于机 构 中普 遍 存在 的接触碰 撞 问题 解决得 不够完 善 ,这 其 中包 括过 多的
交替地 呈相切 和相 割的位置 。链传 动这一 运动学特 性被称 为 传 动 系 统 ,其 中驱 动 力通 过 两 级 齿 轮 减 速 后 驱 动 链 轮 的主 动
多边形 效应 。当主动 链轮 匀速变化 时 ,传 动链条 的线速度和 轮 。因此整个仿真系统包括减速部分 ( 齿轮 与传动轴 ) 以及链 从动轮 的角速度 呈周 期性 变化 。 多边 形效 应使得链 传动的传 传动部分 。前者 主要依 靠M T A 的数学模型 来搭建 ,后者在 A LB
诸 多困难 ,而且很多理论的研究结果 与实际情况存在较大程度 传 动系统本 身是 由链轮和 多段链节组成 ,满足R c r y 的应 e uD n 的差异。 因此 ,依 靠计 算机进行仿真成为 了链传动系统研究的 用范围 ,且在R c D n e u y 中具有链传动的模型库 ,可 以满足参 r
动过程 相对于齿 轮等 刚性传 动件来说 ,其 传动过程 中的 击 R c ry 软件 中实现 ,最后二者通过R c ry 与M T A 的接 口 中 eu D n e u D n A LB
以及动载 荷 非常 明显 ,单纯 用数学模 型榷述 具有很 高的极 限 有机结合成链传动仿真系统。
轮是组合后形成一个子系统 ( u s s e 来进行仿真的。对 S b y t m)
该子系统 的各个部件进行参数化设计 ,其具体参数如表所示。
表 链传动 系统参数 选择
主动轮齿数乙 从动轮齿数Z 2
链 轮 直 径d 两轮 中心 距 a 链 条 型号 链节距尸
发的 多体 系统动 力学仿 真软件 。 它采 用相对 坐标系运 动方程
M T A 作为数值计算的先进工具 ,其简易的编程语法结 A LB
量大、装配复杂的问题 ,而且其 中链轮和链节 间约束的定义 复 构 、种类繁 多的调用函数以及 与众多软件之 间的接 口再加上其
杂 ,求解速度慢。多体 动力学软件R c r y 为链轮传动系统的 强大 的数值计算功能 ,使之成为科 学计算和数学分析的首选工 euDn 分析提供 了新思路 。 具 。本文通过R c r y 的接 口程序 用M T A 作为计算引擎 , euD n A LB 将其与R c ry 完美结合 ,实现优势互补、强强联合 。 euDn
二 、动 力学 模 型
1 . 链传动运动学与动力学特 性
链 传动 的运动 学特性 ,是 由 于围 在链轮上 的链条 由多边 形组成 这一性 质而形 成。链 条 中心线 与链 轮分度 圆在运动 中
三 、 动 力 学模 型 建 立
1动力学模 型参数 .
我们最 终要 实现 的动 力学模型是 经过两 级齿Байду номын сангаас减速 的链
n 仿 真
本文从实际应 用的链轮传动装置入手 ,介绍 了使 用R c y 软件进行链传动 系统分析的流程 e uD n r 件的交互以及仿真 结果 ,给 出了基 于MA L B T A 和R c r y 软 件的链传动仿真分析 系统。 e uD n 与MA L 软 T AB
,
基 于 R c y 和 MA B e D u n r T A 的 L
链传 动仿 真 系统
口装 甲兵工程学院控制 系电气室 乔学敏 马晓军
一
、
引 言
简化 、求解效率低 和求 解稳定性 差等 问题 ,难 以满足 工程的
链 传动是 一种广 泛应 用的机械传 动形式 ,被 广泛应 用于 实际需 要。在这 一点上 ,R c r y 求解速度快 、稳定性好 , euDn 运输、起 重、建筑和化 工等 多种机械 的动 力传动中。但 是由于 不 但可 以解决传统 的运 动学 和动 力学 问题 ,还能很 好地解 决 链传动系统属于挠性传动装置 ,对其进行精确 的数学描述存在 机 构 接 触 碰 撞 问 题 ,拓 展 了 多体 动 力学 软 件 的 应 用 范 围 。 链