异步电机直接转矩控制系统的仿真研究
毕业设计(论文)-直接转矩控制的异步电机调速系统仿真研究[管理资料]
![毕业设计(论文)-直接转矩控制的异步电机调速系统仿真研究[管理资料]](https://img.taocdn.com/s3/m/c94ae2c6a32d7375a517805e.png)
引言随着微电子技术、电力电子技术、计算机控制技术的进步,交流电动机调速技术发展到现在,有了长足的进步。
特别是20世纪70年代出现的矢量控制技术和80年代出现的直接转矩控制技术,使交流电动机调速系统的性能可以与直流电动机调速系统的性能相媲美。
而交流电动机尤其是鼠笼异步电动机由于其自身结构和运行特性的优点,使得交流电动机调速系统的优势强于直流电动机调速系统。
在交流电动机控制技术中调压调频控制、矢量控制以及直接转矩控制(Direct Torque Control简称DTC)具有代表性。
其中应用直接转矩控制技术是一种高性能的控制调速技术,直接转矩控制对交流传动来说是一种最优的电动机控制技术,它可以对所有交流电动机的核心变量进行直接控制。
第1章绪论异步电动机调速系统的发展状况在异步电动机调速系统中变频调速技术是目前应用最广泛的调速技术,也是最有希望取代直流调速的调速方式。
就变频调速而言,其形式也有很多。
传统的变频调速方式是采用v/f控制。
这种方式控制结构简单,但由于它是基于电动机的稳态方程实现的,系统的动态响应指标较差,还无法完全取代直流调速系统。
1971年,德国学者EBlaschke提出了交流电动机的磁场定向矢量控制理论,标志着交流调速理论有了重大突破。
所谓矢量控制,就是交流电动机模拟成直流电动机来控制,通过坐标变换来实现电动机定子电流的励磁分量和转矩分量的解藕,然后分别独立调节,从而获得高性能的转矩特性和转速响应特性。
矢量控制主要有两种方式:磁场定向矢量控制和转差频率矢量控制。
无论采用哪种方式,转子磁链的准确检测是实现矢量控制的关键,直接关系到矢量控制系统性能的好坏。
一般地,转子磁链检测可以采用直接法或间接法来实现。
直接法就是通过在电动机内部埋设感应线圈以检测电动机的磁链,这种方式会使简单的交流电动机结构复杂化,降低了系统的可靠性,磁链的检测精度也不能得到长期的保证。
因此,间接法是实际应用中实现转子磁链检测的常用方法。
三相异步电动机直接转矩控制系统仿真报告
三相异步电动机直接转矩控制系统仿真报告摘要:利用直接转矩控制( DTC )理论,研究异步电动机直接转矩控制调速系统的基本组成和工作原理,建立了异步电动机直接转矩控制系统的仿真模型。
利用MATLAB /Simulink软件对异步电动机直接转矩控制系统进行建模和仿真。
结果表明: DTC系统具有动态响应速度快、精度高、易于实现的优点。
仿真结果验证了该模型的正确性和该控制系统的有效性。
关键词:异步电机;直接转矩控制; MATLAB仿真1 引言自从20世纪70年代矢量控制技术发展以来,交流拖动技术就从理论上解决了交流调速系统在静动态性能上与直流调速系统相媲美的问题。
所谓矢量控制,就是将交流电动机模拟成直流电动机来控制,通过坐标变换实现电机定子电流的励磁分量和转矩分量的解耦,然后分别独立控制,从而获得高性能的转矩和转速响应特性。
直接转矩控制(Direct Torque Control DTC)是在矢量控制基础之上发展起来的,是继矢量控制以后提出的又一种异步电动机控制方法。
其思路是把异步电动机和逆变器看成是一个整体,采用电压矢量分析方法直接在静止坐标系下分析和计算电动机的转矩和磁链,通过磁链跟踪得出PWM 逆变器的开关状态切换的依据从而直接控制电动机转矩"与矢量控制相比,直接转矩控制的主要优点是:在定子坐标系下对电动机进行控制,摒弃了矢量控制中的解藕思想,直接控制电动机的磁链和转矩,并用定子磁链的定向代替转子磁链的定向,避开了电动机中不易确定的参数(转子电阻)"由于定子磁链的估算只与相对比较容易测量的定子电阻有关,所以使得磁链的估算更容易、更精确,受电动机参数变化的影响也更小"此外,直接转矩控制通过直接输出转矩和磁链的偏差来确定电压矢量,与以往的调速方法相比,它具有控制直接!计算过程简化的优点"因此,直接转矩控制一问世便受到广泛关注,目前国内外围绕直接转矩控制的研究十分活跃。
一种异步电动机直接转矩控制系统仿真研究
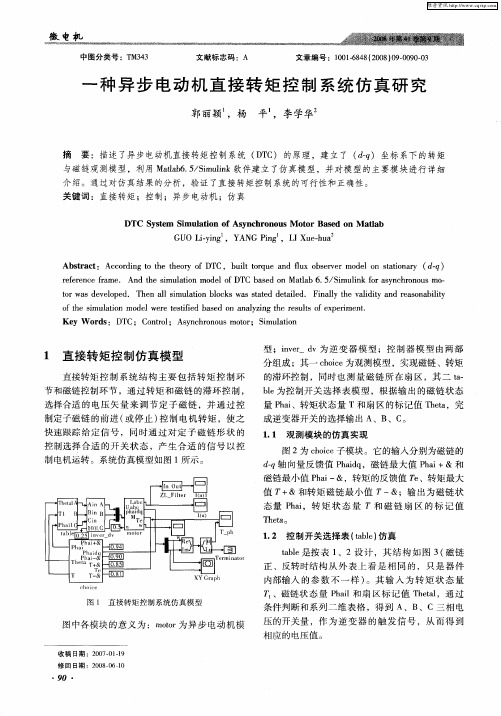
dq轴 向量 反馈 值 P a q — hi ,磁链 最 大 值 P a +& 和 d hi 磁 链 最小值 P a一&,转 矩 的反 馈值 、转 矩最 大 hi 值 +& 和转矩 磁 链 最 小值 一&;输 出为磁 链 状
型 ;ivr v为 逆 变 器 模 型 ;控 制 器模 型 由两 部 ne _d
分 组成 ;其 一 co e为观测模 型 ,实现 磁链 、转矩 hi c
的滞环控制 ,同时也测 量磁链所 在扇 区,其 二 t a —
be为控 制开 关选 择 表 模 型 ,根 据输 出 的磁链 状态 l 量 Pa、转 矩状 态 量 T和扇 区的标 记 值 T e ,完 hi ht a
l — 一 一 一 一 … … 一 ~ 一 ~ 一 ~ 2 一 — … 一 8
中 图分 类号 :T 4 M33
文 献 标 志码 :A
文 章 编 号 :10 -8 8 20 )9 09 —3 0 1 4 (0 8 0 —0 00 6
一
种 异 步 电动 机 直 接 转 矩 控 制 系统 仿 真 研 究
郭丽颖 ,杨 平 ,李学华
( .五邑大学 ,江门 5 92 ;2 1 2 0 0 .青 岛大学 ,青 岛 2 67 ; 601 ) (1.广东松山职业技术学院,广东韶关 512126;2.五邑大学信息学院,广东江门 529020)
摘 要 :描述 了异 步 电动机 直接 转矩 控制 系统 ( T ) 的原 理 ,建 立 了 ( —) 坐标 系下 的 转矩 DC dq
o he smu ain mo lwe e t siid b s d o n lzn h e u t fe p rme t ft i l t de r e tfe a e n a ay i g t e r s ls o x e i n 。 o Ke o d y W r s: DTC; Co to ; As n h o o tr; Smu ain nrl y c r n usmo o i lto
基于SVPWM的异步电机直接转矩控制仿真研究
1 引言1.1交流调速技术的发展和现状在工农业生产、科技、国防及日常生活等各个领域,电动机作为主要的动力设备被广泛应用。
直流电动机相比于交流电动机,结构复杂、体积大、成本和维护费用高,并且不适于环境恶劣的场合,但凭借控制简单、调速平滑和性能良好等特点在早期电气传动领域中一直占据主导地位[1]。
从20世纪30年代开始,人们就致力于交流调速技术的研究。
特别是20世纪60年代以后,电力电子技术和控制技术的飞速发展,使得交流调速性能得到很大的提高,在实际应用领域也得到认可和快速的普及。
交流调速的发展可以说是硬件和软体的发展过程[3]。
随着电力电子技术、微处理器技术和自动化控制技术的不断完善和发展,使得交流调速系统的调速范围宽、速度精度高和动态响应快,其技术性能可与直流调速系统相媲美、相竞争,并在工程应用领域中逐渐取代直流调速系统[5]。
交流电动机的高效调速方法是变频调速,它不但能实现无级调速,而且根据负载的特性不同,通过适当调节电压和频率之间的关系,可使电机始终高效运行,并保证良好的动态特性,更能降低起动电流、增加起动转矩和改善电机的起动性能。
交流调速控制理论的发展经历了电压-频率控制、矢量控制、直接转矩控制,控制理论的发展使控制系统性能不断提高[2]。
电压-频率协调控制,即恒压频比控制,是指在基频以下调速时维持输出电压幅值和频率的比值恒定,实现恒转矩调速运行;在基频以上调速时,将输出电压维持在额定值,使磁通与频率成反比下降,实现弱磁恒功率调速运行。
其控制系统结构简单,成本低,能满足一般的平滑调速,但动、静态性能有限,适用于风机、水泵等负载对调速系统动态性能要求不高的场合[8]。
矢量控制就是将磁链与转矩解耦,有利于分别设计两者的调节器,以实现对交流电机的高性能调速。
矢量控制方式又有基于转差频率控制的矢量控制方式、无速度传感器的矢量控制方式和有速度传感器的矢量控制方式等[12]。
这样就可以将一台三相异步电机等效为直流电机来控制,因而获得与直流调速系统同样的静、动态性能。
三相异步电动机直接转矩控制系统仿真报告

三相异步电动机直接转矩控制系统仿真报告 Document number:PBGCG-0857-BTDO-0089-PTT1998三相异步电动机直接转矩控制系统仿真报告摘要:利用直接转矩控制( DTC )理论,研究异步电动机直接转矩控制调速系统的基本组成和工作原理,建立了异步电动机直接转矩控制系统的仿真模型。
利用MATLAB /Simulink软件对异步电动机直接转矩控制系统进行建模和仿真。
结果表明: DTC系统具有动态响应速度快、精度高、易于实现的优点。
仿真结果验证了该模型的正确性和该控制系统的有效性。
关键词:异步电机;直接转矩控制; MATLAB仿真1 引言自从20世纪70年代矢量控制技术发展以来,交流拖动技术就从理论上解决了交流调速系统在静动态性能上与直流调速系统相媲美的问题。
所谓矢量控制,就是将交流电动机模拟成直流电动机来控制,通过坐标变换实现电机定子电流的励磁分量和转矩分量的解耦,然后分别独立控制,从而获得高性能的转矩和转速响应特性。
直接转矩控制(Direct Torque Control DTC)是在矢量控制基础之上发展起来的,是继矢量控制以后提出的又一种异步电动机控制方法。
其思路是把异步电动机和逆变器看成是一个整体,采用电压矢量分析方法直接在静止坐标系下分析和计算电动机的转矩和磁链,通过磁链跟踪得出PWM逆变器的开关状态切换的依据从而直接控制电动机转矩"与矢量控制相比,直接转矩控制的主要优点是:在定子坐标系下对电动机进行控制,摒弃了矢量控制中的解藕思想,直接控制电动机的磁链和转矩,并用定子磁链的定向代替转子磁链的定向,避开了电动机中不易确定的参数(转子电阻)"由于定子磁链的估算只与相对比较容易测量的定子电阻有关,所以使得磁链的估算更容易、更精确,受电动机参数变化的影响也更小"此外,直接转矩控制通过直接输出转矩和磁链的偏差来确定电压矢量,与以往的调速方法相比,它具有控制直接!计算过程简化的优点"因此,直接转矩控制一问世便受到广泛关注,目前国内外围绕直接转矩控制的研究十分活跃。
基于MATLAB的异步电机直接转矩控制系统的建模与仿真

图 1 D SC系统主电路
图 2 电压空间矢量
对电压型逆变器-电机系统, 逆变器的输出电 压 us ( t)直接加在异步电机的定子上, 则定子电 压也为 us ( t)。若忽略定子电阻压降的影响, 定 子磁链 s ( t )与定子电压 us ( t)的关系为:
磁链空间矢量的顶点将沿 S2 边运动, 至 S2 和 S3 的交点时给出 u3; 依次类推, s ( t )的顶点将分别 沿 S3、S4、S5、S6 边运动。直接利用逆变器的 6种 工作开关状态, 简便地获得六边形磁链轨迹来控 制电机。该方法即 DSC 的基本思想。 1. 2 六边形磁链轨迹 DSC 系统的结构
T T e - T g - T 时, 输出不变。转矩容差 T 取 1 N m。
开关选择模块: 由 S 函数编写, 根据磁链与电
压空间矢量的对应关系, 将 3个磁链调节器的输
出变为逆变器的开关信号, 转矩调节器的输出决
定零矢量的插入。当转矩开关信号为 0时, 此模 块输出零电压矢量; 当转矩开关信号为 1时, 此模
Ir
rLm L s
R sLm
rLsLr - RrLs
Is
Lr
0 0 0 Us
Is + a 0
Lr 0 0 Us
Ir
- Lm 0 0 0 0
Ir
0 - Lm 0 0 0
( 2) 式中, a = 1 / ( LsLr - Lm2 )。
电磁转矩方程式为:
T e = 1. 5 P nLm ( Is Ir - Is Ir )
块通过建立磁链开关信号与逆变器开关信号的对
异步电动机直接转矩控制系统的研究与仿真
异步电动机直接转矩控制系统的研究与仿真作者:冯娜,郭涛来源:《现代职业教育·高职高专》2017年第11期[摘要] 针对异步电动机的直接转矩控制系统进行了Matlab/Simulink的建模与仿真研究。
并在原有基础上对转速调节器进行了改进,通过对仿真波形的比较与分析,表明系统的动态性能有了很大提高,为实际的异步电机直接转矩控制系统的设计提供了思路。
[关键词] 直接转矩控制;Matlab;动态性能[中图分类号] G712 [文献标志码] A [文章编号] 2096-0603(2017)31-0192-02一、直接转矩控制的基本原理直接转矩控制系统原理框图图1所示:交流电经整流器整流后输出直流,为逆变器提供工作电压。
电动机侧测得电压和电流值,并经3/2坐标变换成两相静止坐标系下的对应值uα、uβ、iα、iβ,然后经磁链观测器得到电机的定子磁链分量ψα、ψβ,经转矩观测器得到转矩实际值Tf。
定子磁链给定值ψg和反馈值ψf 比较输出偏差信号,经磁链调节器后产生磁链开关信号ψQ。
转矩给定值Tg和转矩实际值Tf 比较后输出的偏差信号经转矩调节器后产生转矩开关信号。
通过判断、的位置可得到磁链所处扇区,此功能由扇区判断模块实现。
开关信号选择模块综合三个输入信号:磁链开关信号ψQ、转矩开关信号TQ、扇区N号,产生正确的电压开关信号给逆变器,完成该闭环控制。
二、系统改进与建模进行电机速度的控制,本质就是是对电机输出转矩的控制。
要想使系统稳定运行在某一转速n1时,必须在该转速下使Te=TL,若要使系统稳定在一个比n1高的转速n2时,则首先在n1转速下使Te>TL,电机加速,当到达转速n2后,再使Te=TL,则电机就在新的转速下稳定运行了。
本文采用比例积分控制器,构成转速PI调节器的无静差系统。
改进后的速度调节器模型如图2所示:模型中利用条件模块来实现积分作用与不作用状态的切换,当转速偏差大于给定值(u 值)时只接通上面的一路即只比例部分起作用;当转速偏差小于给定值时,开关接通下面一路比例积分同时作用。
异步电动机直接转矩控制的MATLAB仿真研究
1 绪论
1.1 交流调速系统的主要类型
交流电机主要分为异步电机(即感应电机)和同步电机两大类,每类电机又有不同 类型的调速系统。 按电动机的调速方法分类常见的交流调速方法有: (1)降电压调速; (2)转差离合器调速; (3)转子串电阻调速; (4)绕线电机串级调速或双馈电机调速; (5)变极对数调速; (6)变压变频调速等等。 在研究开发阶段,人们从多方面探索调速的途径,因而种类繁多是很自然的。现在 交流调速的发展已经比较成熟,为了深入掌握其基本原理,就不能满足于这种表面上的 罗列,而要进一步探讨其本质,认识交流调速的基本规律。 电动机的能量转换类型 按照交流异步电机的原理,从定子传入转子的电磁功率可分成两部分:一部分是拖 动负载的有效功率,称作机械功率;另一部分是传输给转子电路的转差功率,与转差率 s 成正比。他们的公式关系见公式(1-1) 、 (1-2) 、 (1-3) 。 Pm = Pmech + Ps Pmech = (1 –s) Pm Ps = sPm
异步电动机的定子磁链模型 ………………………………………………………… 19 3.1 定子磁链模型 ………………………………………………………………… 3.2 转矩调节器与磁链调节器 …………………………………………………… 3.2.1 转矩调节器 …………………………………………………………… 3.2.2 磁链调节器 …………………………………………………………… 17 18 19 19
第 1 页 共 33 页
异步电动机直接转矩控制 MATLAB 仿真研究
时) 。可是这类系统结构简单,设备成本最低,所以还有一定的应用价值。 ② 转差功率馈送型调速系统 在这类系统中, 除转子铜损外, 大部分转差功率在转子侧通过变流装置馈出或馈入, 转速越低,能馈送的功率越多,上述第(4)种调速方法属于这一类。无论是馈出还是 馈入的转差功率,扣除变流装置本身的损耗后,最终都转化成有用的功率,因此这类系 统的效率较高,但要增加一些设备。 ③ 转差功率不变型调速系统 在这类系统中,转差功率只有转子铜损,而且无论转速高低,转差功率基本不变, 因此效率更高,上述的第(5) 、 (6)两种调速方法属于此类。其中变极对数调速是有级 的, 应用场合有限。 只有变压变频调速应用最广, 可以构成高动态性能的交流调速系统, 取代直流调速;但在定子电路中须配备与电动机容量相当的变压变频器,相比之下,设 备成本最高[1]。
异步电动机直接转矩控制系统的MATLAB仿真
异步电动机直接转矩控制系统的MATLAB仿真一、本文概述随着电力电子技术和控制理论的不断发展,异步电动机直接转矩控制系统(Direct Torque Control, DTC)已成为电动机控制领域的重要研究方向。
该控制系统以其快速响应、高鲁棒性和简单的结构特性,在电力驱动、工业自动化、新能源汽车等领域具有广泛的应用前景。
本文旨在通过MATLAB仿真平台,对异步电动机直接转矩控制系统进行深入研究和探讨。
本文将首先介绍异步电动机直接转矩控制的基本原理和主要特点,包括其与传统矢量控制方法的区别和优势。
随后,将详细阐述异步电动机的数学模型,以及DTC系统中转矩和磁链的控制策略。
在此基础上,利用MATLAB/Simulink仿真软件,构建异步电动机DTC系统的仿真模型,并对仿真模型中的关键参数和模块进行详细设计。
本文的重点在于通过仿真实验,分析异步电动机DTC系统的动态性能和稳态性能,探讨不同控制参数对系统性能的影响。
将针对仿真结果中出现的问题和不足,提出相应的改进措施和优化策略,以提高DTC系统的控制精度和稳定性。
本文将对异步电动机直接转矩控制系统的未来发展趋势和应用前景进行展望,为相关领域的研究人员和工程师提供参考和借鉴。
二、异步电动机直接转矩控制系统理论基础异步电动机直接转矩控制系统(Direct Torque Control, DTC)是一种高效的电机控制策略,旨在直接控制电机的转矩和磁链,从而实现快速动态响应和优良的控制性能。
与传统的矢量控制相比,DTC具有算法简单、易于数字化实现、对电机参数变化不敏感等优点。
异步电动机DTC系统的理论基础主要建立在电机转矩和磁链的直接控制上。
在DTC中,通过检测电机的定子电压和电流,利用空间矢量脉宽调制(Space Vector Pulse Width Modulation, SVPWM)或滞环比较器(Hysteresis Comparator)等控制手段,直接计算出所需的电压矢量,以实现对转矩和磁链的快速调节。
异步电动机直接转矩控制的SIMULINK仿真研究
收稿日期:2006-93-04作者简介:陈彬(1981_),男,湖北蕲春人,在读硕士,研究方向为电力电子与交流传动.文章编号:1005-0523(2007)01-0093-04异步电动机直接转矩控制的SIMULINK 仿真研究陈 彬,宋平岗,何 鑫(华东交通大学电气与电子工程学院,江西南昌330013)摘要:分析了异步电动机直接转矩控制的基本原理,介绍了一种基于SIMULINK 的异步电动机直接转矩控制系统的仿真方法.该方法包括编写S 函数来实现异步电机磁链扇区的判断和逆变器开关矢量的选择,以及利用Si mpowersystems 基本模块库来实现功率部分的仿真.实例的仿真结果表明该方法简单有效,为直接转矩控制系统的进一步研究奠定了基础.关 键 字:直接转矩控制;磁链;电压空间矢量;S 函数中图分类号:TM343 文献标识码:A0 引言异步电动机的直接转矩控制(D TC)作为一种新型的交流变频调速技术,它抛弃了矢量控制中的解耦思想,直接从定子坐标系入手,解决了矢量控制中转子磁链难于观测;系统性能受电机参数影响较大;矢量旋转变换较为复杂等缺陷.由于其简洁明了的系统结构,优良的动态性能,因此受到普遍的关注.目前对于直接转矩的研究主要集中在磁链观测模型的研究、转矩脉动的研究以及无速度传感器的研究.其仿真大多采取MATLAB 这一基本工具,普遍直接采用SI MULINK 模块搭建系统的仿真模型[1],但由于系统复杂性如磁链扇区的判断、逆变器开关表的实现,给模型的搭建带来诸多不便.而采用S 函数能使系统的仿真结构原理清晰,易于移植,可操作性强,为直接转矩的研究提供了一方便简洁的途径[2].本文以基本磁链观测模型为基础,采用两电平磁链调节器和三电平转矩调节器,结合Simpo wersystems 基本模块库和S 函数构建出异步电机的直接转矩控的仿真模型,为实现异步电机的直接转矩研究提供了新的仿真平台.1 直接转矩的基本原理直接转矩控制是建立在电压源型PWM 逆变器传动系统基础上的一种先进的标量控制技术,它是在定子坐标系下分析异步电机的数学模型,采用定子磁场定向的方案实现传动系统的转矩和磁链的直接控制.图1为异步电机直接转矩控制的原理图,将电机检测出的转速与目标转速比较,通过PI 调节器生成目标转矩指令.检测出的定子电压及电流通过磁链和转矩观测器[3]得出定子磁链观测值和实际电磁转矩,经过磁链和转矩的滞环调节,根据磁链定子磁链所在区域,不断切换逆变器的开关态使定子磁链轨迹逼近于圆形,并通过零状态电压矢量的穿插调节来改变转差频率,以控制电机的转矩及其变化率,使异步电机的转矩和磁链能同时按要求变化.图1 异步电机直接转矩控制系统原理图1.1 磁链观测和磁链区域判断异步电机的磁链观测模型主要有三种磁链模第24卷第1期2007年2月华 东 交 通 大 学 学 报Journal of East China Jiaotong Universi ty Vol.24 No.1Feb.,2007型:u-i 模型,i-n 模型和u-n 模型,由于u-i 模型结构简单[4],在计算过程中所需的电机参数是电机定子电阻,在本仿真研究中我们将采用这一数学模型,u-i 磁链模型可表示为:s = (u s-R s i s )dt s= (us -R s i s )dt(1)电磁转矩观测模型可表示为:T e =34P( s i s - s i s )(2)其中参数P 为电机的极数.定子磁链的幅值可通过下式计算出:s =2 s +2 s(3)为了合理选择逆变器开关状态以实现异步电机的近圆形旋转磁场,将定子磁链矢量的空间位置划分为S 1!!!S 6共六个扇区,如图2:图2 磁链扇区的划分磁链矢量所在的扇区的判断同电压空间矢量的扇区判断方法是一致的,都是采用坐标变换的方式通过求幅角或实轴、虚轴分量来判断,而由幅角来判断扇区的方法采取了反三角函数的形式,在实际的硬件实现中对控制系统有较高的要求,故采用通过定子磁链矢量的分量的符号及其比值来判断扇区的位置.其算法的实现较简单,判断过程如下表1所示:表1 磁链扇区的判断s >0-0.57 s / s <0.577S 1 s / s 0.577S 2 s / s <-0.577S 6 s ∀0s >0S 3s <0S 6 s =0S 1 s <0s / s <-0.577S 3-0.577 s / s <0.577S 4 s / s 0.577S 5s ∀0s >0S 1 s >0S 4 s =0S 4在SI MULI NK 仿真实现过程中,我们通过编写S -函数模块来确定磁通矢量的扇区,主程序略.1.2 磁链和转矩调节器为维持磁链幅值在允许的误差范围内波动以保证磁链的近圆形旋转,采用磁链的滞环调节从而保证了磁链的幅值的大致恒定.如磁链增加时应选择合适的定子电压矢量使定子磁链的幅值减小,磁链减小时则通过定子电压矢量的改变来增加定子磁链幅值.通常磁链调节器做成一个两电平的砰-砰控制器结构.转矩调节器的任务实际就是对转矩的直接控制,通过转矩的滞环调节,选择相应的定子电压矢量以控制定子磁链的旋转速度,从而把实际的电磁转矩控制控制在一定的容差范围内.通常转矩调节器做成一个三电平的砰-砰控制器结构.两调节器的结构如图3所示:1.3 逆变器电压矢量的选择以定子绕组轴线,在空间建立abc 三相静止坐标系,同时建立 两相静止坐标系,其中 轴与a轴重合.根据三相电压型逆变器的不同开关状态s a s b s c 可得到8个空间矢量,其中u 0、u 7为零矢量,电压空间矢量的空间位置如图2中所示.下面以定子磁链处于第2扇区时为例,介绍了电压矢量的选择原理.图3!a 磁链调节器图3!b 转矩调节器从图4中可以看出,电压矢量u 1、u 2和u 3的作用会使磁链增加;u 4、u 5和u 6的作用会使磁链减少.同样地,电压矢量u 3和u 4作用时,磁通角增大,转矩会增加;u 1和u 6作用时,磁通角减小,转矩会减少;当u 2超前定子磁链矢量时,u 2作用使磁通角增大转矩增大,u 5作用使磁通角减小转矩减小;当94华 东 交 通 大 学 学 报2007年u 2滞后定子磁链矢量时,u 2、u 5对转矩的影响与前者相反.零矢量的作用时,定子磁链静止,幅值不变,但由于转子磁链继续旋转,磁通角会变小使转矩减小[5].为保证定子磁链的近圆形运转同时使电磁转矩的容差控制在一定的范围内,根据上述分析方法,通过磁链和转矩的滞环调节器可判断出作用于逆变器的下一电压矢量[6],由此便可确定三相电压逆变器的开关状态,开关状态选择表如表2所示:图4 电压空间矢量的选择基本原理表2 逆变器开关状态选择表H 10H T10-110-1扇区1u 2u 0u 6u 3u 7u 5扇区2u 3u 7u 1u 4u 0u 6扇区3u 4u 0u 2u 5u 7u 1扇区4u 5u 7u 3u 6u 0u 2扇区5u 6u 0u 4u 1u 7u 3扇区6u 1u 7u 5u 2u 0u 4在本仿真中,通过编写S -函数来实现表2逆变器的开关状态选择,主程序略.2 系统仿真及分析根据上述分析,最终构建出笼型异步电动机的直接转矩控制仿真系统.异步电机的仿真参数:额定功率P N =2.2kw ,额定电压u N =220V ,额定频率f N =50Hz ,定子电阻R s =0.435!,定子自感L s =0.002H ,转子电阻R r =0.81!,转子电感L r =0.002H ,互感L m =69.31m H ,转动惯量J =0.005kg m 2,摩擦系数F =0,定子磁通 *s =0.8Wb ,转矩偏差∀T =0.5N m ,磁通偏差∀ =0.005Wb .仿真过程采用并行启动的方式,即电磁转矩和定子磁通同时达到参考值,为验证系统的动态响应性能,设置系统的转速指令#=100rad/s ,负载转矩在时0<t 0.3s ,T L =4N m ,03s<t 0.8s ,T L =10N m ,0.8s<t 时,T L =7N m ,加负载后系统的仿真结果如下所示:图5 磁链轨迹曲线图6 直接转矩控制系统仿真特性曲线95第1期陈彬,等:异步电动机直接转矩控制的SIMULINK 仿真研究图5,6的仿真结果表明:1,直接转矩控制系统的动态调节过程迅速.由于系统在速度环采用了PI 调节,在负载转矩发生变化时,电机的转速能迅速达到指令转速的要求.2,合理设置系统的容差,可使定子磁链的轨迹接近于圆形,同时定子电流波形接近于正弦波.3,直接转矩控制系统存在一定的转矩脉动,这与选取磁链观测模型以及系统容差有关.3 结 论异步电机的直接转矩控制系统具有动态响应速度快,性能受电机参数影响小,计算简单等优点,本文在SI MULINK中建立起异步电机的直接转矩控制的仿真模型,验证了异步电机在高速范围内的这一动态性能,对于低速范围内的仿真只需修改磁链观测模型即可,同时我们也发现如何在全速范围内建立起一个算法简单的磁链观察模型以及如何减少转矩脉动这将是今后的研究重点.这一仿真平台的建立必将为以后的交流调速系统的研究开发奠定基础.参考文献:[1]周平.交流异步电动机直接转矩控制系统的仿真建模,微特电机,2005,(5):35-38.[2]黄志武.基于simulink/s函数的直接转矩控制系统仿真研究,自动化技术与应用,2006,(4):52-56.[3]Bimal K.Bose著,王聪,等译.现代电力电子学与交流传动[M].北京:机械工业出版社,2005.[4]Stator and Rotor Flux Based Deadbeat Direct Torque Control ofInduction Machines,Barbara H.Kenny,NAS A/TM!2001-211100/REV1.[5]Andrzej M.Trzynadlowski著;李鹤轩等译,异步电动机的控制[M].北京:机械工业出版,2003.[6]李翼昆.异步电动机直接转矩控制的仿真与分析[J],控制工程,2004,(11):194-197.S imulation and Analysis on Direct Torque Control for InductionMotors Based on Simu linkC HEN Bin,SONG Ping_gang,HE Xin(East China Jiaotong University,Nanchang330013,China)Abstract:It analyses the fundament of direc t torque control(DTC),and presents a new simulated method of DTC based on simulink soft.It includes compiling S_function for estimating the flux sector of squirrel_ca ge AC machine and selec ting the switching ing simpowersystems blocks simulates the power system.The result of an exa mple simulation indicates simpleness and effectiveness of this method which establishes the fundament for next researching in D TC.Key words:DTC;flux;voltage vector;S_Function96华 东 交 通 大 学 学 报2007年。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
在一 定 的容 差 范 围 内, 直接 对 逆变 器 开关 状 态进O O 制 。 O 广 泛 行控 O 目前 应用 于 三相 异 步 电动机 、 关磁 阻 电动机 和 永磁 同步 电动机 等 。 开 但 好 多方案 的 研究 仅 限于 试验 , 业 化 方面 的 应用 不 理想 , 产 且低 速 性
D; n i。n c e g y i 。 g u a qg g h n u z d n h a
异步 电机直接 转矩控制 系统 的仿真研究
李 君 王 忠 庆 ( 中北接 转 矩 控 制 的 原 理 和 仿 真 模 搭 建 , 基 本 原 理 、 介 从 结构 特 点 、 现 策 略 等 方 面 对 其 进 行 了 详 细 论 述 。 通 过对 转 矩 调 节 和 磁 实
=
( 2 )
R 0 0 0 0
式 中 , 为 负载转 矩 ; 为 电动机 的转动 惯 量 ; 为与 转速 成 正 比的 . , D
O T ru o t 1 成 为继 矢量 控制 之 后 又一 新 兴 的交流 调 O O 控 转 矩 阻尼 系 数 ; 为扭 转 弹性 转矩 系 数 ; 为极 对 数 。 oq e n o) C r 速领 域 K 只 O
能等 。 [] 12 异步 电动机 的 数学 模 型和 坐 标变 换 .
影 响而 使 得系 统 的鲁 棒 性 能下 降 的 问题 。它 强调 转矩 的直 接控 制
效果, 采用 离散 的 两 点式 调 节器 ( agB n 控 制) 将 转 矩观 测 值 B n- ag ,
使 其 建 立数 学 模型 之前 ,必须 明确 对于 正 方 向 的规 定 ,如 图 l 所 与转 矩 给 定值 作 比较 , 转矩 波 动 限定 在一 定 的误 差 范 围之 内, V WM 波形 控 制信 号 。 [ z ] 示 , 方 向规 定如 下 : 1 电压 正 方 向 ( 头 方 向, 同) 电压 降低 结 果作 为产 生 逆变 器 S P 正 () 箭 下 为
高 、 制 思想 新 颖 等 特 点逐 渐 受 到 人 们 的重 视 。许 多学 者 已经对 控
UA
U B
^
口
MC
c
‰
6 Ue 6
直 接转 矩 控 制 系 统 的 各 种 不 同 实 现 方 案 进 行 了 比较 深 入 细 致 的 研 究 , 文 仅 对 不 同 的研 究 方 案 作 分 析 和 比较 , 时对 其进 行 仿 本 同 真说明。
2 世纪 6 0 O年 代 中 期 , 国 A.coug等 人 将 通 信 系 统 中 的 德 Sh nn 调 制 技 术进 行推 广 , 现 代 交 流 调速 技 术 发 展 开 辟 了新 的道 路 。 为
其 中 ,异 步 电机 的直 接 转 矩 控 制 策 略 以 其控 制 结 构 简 单 、 精度
O 制 方法 , 过 直接 在 定 子 坐 标 系 下分 析 模 型 , 0 磁 通 计 算 0 链和 转 0 采 矩, 用两 点 式调 节器 , 转 矩检 测 值与 其 给定 值 比较O, O 矩波 动 0 制 将 使转 O 限
ZT寺 + =+ L 卅 0
() 动 方程 。一 般 机 电系 统 的基 本运 动 方程 式 为 : 3运
链 调节 的比较 , 分析 了传 统的直接转矩控 制L 存在 的不足 , { _ | 通过对丰I f _ 关问题成因 的分 析, 出了相 对应 的使 电机产生 更优 控制 电压波形 的方法, 提
最 后 通 过 MAT AB 仿 真 验 证 试 验 结 果 。 L 关键词 : 步电动机 ; 接转矩 榨制 ; 异 直 MAT AB Smui ; 子 电 阻变 化 L / i lk 定 n
0 0 0 0 0 R2j 【 i J 【
式 中 ,, “ 为 定 子相 电压 的 瞬 时值 ;a - 1, 1 A l, 为转 子相 电压 的瞬 g‰U 时 值 : , , 为 定子 相 电流 的瞬 时 值 ; ,.为 转 子 相 电流 的 瞬 时 i ii A i 。
告 + + 告 0
( 3 )
13 直 接 转 矩 控 制 基 本 思 想 .
所 谓直接 转矩 控 制 , 是直 接 控制 电磁 转 矩 和 定子 磁 链 , 就 省掉
只 避 能 的不尽 人 意和 转矩 脉 动大 等 问题 成 为制 约 感应 电动机 调 速 的瓶 旋 转 坐标 变换 , 需 定 子 电阻 即可 观测 定 子磁 链 , 开 了转 子 电阻 的影响。 直接 在 定 子坐 标 系下 分 析 电动机 的数学 模 型 , 控制 电动 机 颈 。有 很 多 学者 在此 领 域进 行 研究 , 提 出可 行 性建 议 , 改 进滞 也 如 的磁 链 和 转矩 ,极 大 地解 决 了矢 量 控制 方 式 中 由于 受转 子 参数 的 环调 节器 、 用 无速 度传 感 器技 术 、 用矢 量 细分 方 法优 化 控 制性 采 利
值 ; , , , , 为各 相 绕 组 的全 磁 链 ; , 帆, R , 分别 为定 子 和 R 转 子绕 组 的 电阻 ; 微 分算 予 。 P为 ( ) 矩方 程 。在 一般 情 况 下 , 2转 电力 拖动 系 统 的运动 方程 是 :
1 异 步 电 动 机 直 接 转 矩 控 制 ( C 的 概 述 DT )
11 直 接 转 矩 ( TC) 制 及 发 展 . D 控
电气传 动 根据 带 动机 械 运转 的源动 机 分 为直 流和 交 流 电气传
动 系统 等 。直 流 电气 传动 系 统 由于 采用 直 流 电机 , 在 结构 复 杂 、 存 维 护频 率 高等 缺 点 , 动 方 式不 理想 。为此 , 传 电动 机 的动 态 数 学模 型有 必要 为新 型控 制 策 略作 依托 。 接转 矩控 制 技 术 D C( r t 直 T Di c e