IR2104芯片驱动电路实现智能车差速控制方案
IR2104s半桥驱动芯片使用经验及注意事项
IR2104s半桥驱动芯⽚使⽤经验及注意事项多次使⽤IR2104s,每次的调试都有种让⼈吐⾎的冲动。
现在将使⽤过程遇到的错误给⼤家分享⼀下,⽅便⼤家找到思路。
⼀.⾃举电容部分(关键)1、听说⾃举电路必须要安装场效应管,于是我在使⽤过程中,安装了只半桥的⾼端场效应管。
结果:⾼端驱动HO⽆输出信号正确做法:⾃举电路回路是与半桥的下场效应管构成回路的,应该安装下场效应管,保险的做法是两个场效应管都安装2、⾃举电容采⽤104,⾃举⼆极管采⽤SS34 ,(这两种参数是我以前⽐赛的常见参数值,很⾃信)测试条件:1K PWM结果:LO 有1K的PWM ,VS 有 1K PWM,上场效应管Ugs = 2V,反思:以前⽐赛的时候,测试使⽤的是信号发⽣器给PWM,标准频率为10K。
正确办法:把输⼊PWM的频率改为 10K 。
因为⾃举电容与⾃举回路的充放电频率有关,频率越⾼,⾃举电容越⼩。
3、买到假芯⽚引起错误有⼀次测试也是⾼端引起不正常,结果换⼀块芯⽚就正常了。
4、现象:IR2104s HO端对地测试的电压为PWM(⾼电平为2倍IR2104s的VCC,低电平为0)IR2104s LO 端对地测试的电压为PWM(⾼电平为1倍IR2104s的VCC,低电平为0)原因:这是很明显的⾃举参数不对,你测Vgs的电压应该是接近0的电平)5、买到假的场效应引起错误。
⼆、驱动部分(共性)1、驱动能⼒不⾜引起带负载能⼒不⾜,且效率低下。
由于IR2104s的推挽电流为130mA/270mA,在做⼤功率电源开关器件的驱动的时候,由于驱动能⼒不⾜,会导致输出带负载能⼒不⾜。
⽬前,IR公司的IR2184的驱动电流为1.4A/1.8A,HIP4081的驱动能⼒有2.5A,TI的UCC系列有4A的驱动。
理由:由于MOSFET的G,D,S两两之间存在寄⽣电容,他们的输⼊电容、输出电容和反向传输电容公式分别为其中:Ciss与驱动设计有关,特别是驱动电流过⼩,充电时间慢。
IR2104 + IRF540 MOS电机驱动全桥

R2104 + IRF540 MOS电机驱动全桥学习与实践过程/bbs/article_1012_130178.html使用L293或L298等全桥芯片来控制直流电机虽然简便而且成本低廉,但由于它们的内阻较大,在控制大电流的马达时芯片常常过热,导致系统的整体效率较低。
在电动车上,马达控制芯片的内阻过大会导致车子的加速度变小。
本人设想在暑假制作一个大的轮式或者履带式机器人,并且希望它能跑到公交车那么快,于是开始研究如何使用MOS管来控制更大电流的电机。
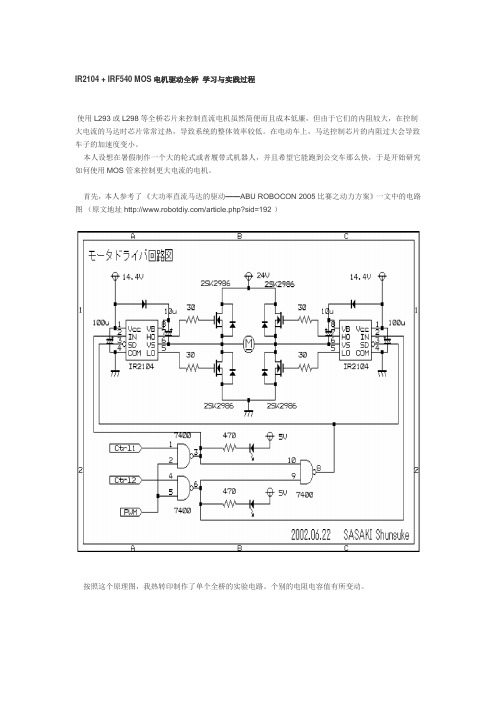
首先,本人参考了《大功率直流马达的驱动——ABU ROBOCON 2005比赛之动力方案》一文中的电路图(原文地址 /article.php?sid=192 )按照这个原理图,我热转印制作了单个全桥的实验电路。
个别的电阻电容值有所变动。
上电并给予有效的持续高电平信号后发现电路不能驱动马达,而2104开始发烫,540没有任何反应。
于是更换2104,但仍出现同样的现象。
通过示波器检测发现,高端MOS没有被驱动,而低端MOS的G端信号正常,因而桥没有被导通。
更换信号方向,另外半桥仍然出现相同的现象。
本人开始怀疑是BOOTSTRAP电容的问题,于是实验了不同的电容值。
但无论怎么变换,问题仍然没有被解决。
由于手头没有4148,使用了IN5819作为续流二极管,按道理5819只会比4148更好,不应该成为问题的原因。
由于手头2104只有6片,而所有的都上电并且发热过,于是重新购买了一批2104。
在这里感谢周顺同学,那天刚好他毕业考考好,帮我到科技京城买了2104。
更换2104后,电路工作正常。
周顺看了看我原来的2104,恍然大悟:原来的芯片是97年前的旧货。
马达欢快地转了起来。
由于540的内阻要比298小很多,马达的加速度明显提高,变向时电刷更是发出了闪亮的火星。
回到家后用示波器开始研究高端MOS的G端驱动电压波形。
发现在EN端为高的初期,高端MOS的驱动电压突然升至比VCC高10V。
ir2104驱动电路原理
ir2104驱动电路原理
IR2104是一种双高侧和低侧驱动电路,旨在用于驱动功率MOSFET和IGBT开关。
它包含两个独立的驱动器通道,每个通道都能提供高达500mA的峰值输出电流。
该驱动电路采用
了单个电源引脚供电,并且具有内部的下拉电阻,以确保MOSFET或IGBT处于关闭状态时的安全性。
IR2104驱动电路的工作原理如下:当输入逻辑电平为高电平时,驱动电路的高侧驱动器通道会输出一个与输入信号相同的高电平信号。
这个信号用于驱动功率MOSFET或IGBT的高
侧开关管。
同时,低侧驱动器通道会输出一个低电平信号,用于驱动低侧开关管。
当输入逻辑电平为低电平时,高低侧驱动器通道的输出电平将交换,高侧变为低电平,低侧变为高电平。
这确保了高低侧开关管的互斥性。
IR2104驱动电路还具有一系列保护功能,例如欠压锁定功能,当输入电压低于一定阈值时,驱动电路将被锁定,防止错误的操作。
此外,还具有短路保护和过温保护功能,以确保系统的安全性和可靠性。
总之,IR2104驱动电路通过提供独立的高低侧驱动器通道,
能够有效地驱动功率MOSFET和IGBT开关,具有较高的峰
值输出电流能力和多重保护功能,适用于各种功率电子应用中。
基于IR2103的步进电机全桥驱动电路设计
基于IR2103的步进电机全桥驱动电路设计申浩锋,高宁波【摘要】为了满足步进电机在特殊领域的应用要求,利用分离电路设计一种全桥驱动电路。
以IRF520为功率放大器件、IR2103为栅极驱动芯片,通过采样电阻和高精度运算放大器获得步进电机的相电流,从而得到步进电机的电流细分控制。
并给出全桥驱动电路,实现步进电机的高精度控制。
【期刊名称】微电机【年(卷),期】2016(049)010【总页数】5【关键词】IR2103;细分控制;全桥驱动0 引言为了满足某雷达伺服系统在低频状态下的运行特性,本文采用现场可编程逻辑门列阵(FPGA) [1-3],设计基于电流细分驱动技术的二相混合式步进电机驱动器[4-5]。
其本质上是将通入电机绕组的电流由传统的矩形波电流变为正弦和余弦波电流,使电流在0和最大值之间有多个稳定的中间值[6-7],这样定子磁场的旋转过程中也就出现了多个稳定的中间状态,对应的步进电机转子旋转的步数增多,步距角减小可有效克服了二相混合式步进电机细分驱动的低频振动、噪声大、高频失步和分辨率低等缺点,极大地提高步进电机的运行性能[8-9]。
但大多数参考文献都只给出理论图形或仿真波形,没有给出试验测试数据,特别是步进电机相电流实际数据波形,以及设定电流和实际电流比较波形。
本文通过调节采样电路滤波电容参数获得较小的相电流纹波,给出设定电流和实际电流波形。
本文应用半桥驱动芯片IR2103,设计全桥驱动电路。
主要是因为其连续工作状态稳定可靠,外围电路简单,功能容易实现,输出电流能够驱动后级MOSFET 管的通断,并且满足电磁干扰试验,有较强的抗干扰能力。
1 全桥驱动原理电流细分驱动的思想是通过对绕组电流的闭环控制使得电流的波形得到了很大的改善。
它的基本思想是通过比较设定电流和反馈电流的值来开通或关断功率管,当反馈电流低于设定电流时控制功率管开通使绕组电流上升,当反馈电流高于设定电流时则关断功率管,从而使绕组电流下降,周而复始。
IR2104 + IRF540 MOS电机驱动全桥 学习与实践过程
IR2104 + IRF540 MOS电机驱动全桥学习与实践过程使用L293或L298等全桥芯片来控制直流电机虽然简便而且成本低廉,但由于它们的内阻较大,在控制大电流的马达时芯片常常过热,导致系统的整体效率较低。
在电动车上,马达控制芯片的内阻过大会导致车子的加速度变小。
本人设想在暑假制作一个大的轮式或者履带式机器人,并且希望它能跑到公交车那么快,于是开始研究如何使用MOS管来控制更大电流的电机。
首先,本人参考了《大功率直流马达的驱动——ABU ROBOCON 2005比赛之动力方案》一文中的电路图(原文地址 /article.php?sid=192 )按照这个原理图,我热转印制作了单个全桥的实验电路。
个别的电阻电容值有所变动。
上电并给予有效的持续高电平信号后发现电路不能驱动马达,而2104开始发烫,540没有任何反应。
于是更换2104,但仍出现同样的现象。
通过示波器检测发现,高端MOS没有被驱动,而低端MOS的G 端信号正常,因而桥没有被导通。
更换信号方向,另外半桥仍然出现相同的现象。
本人开始怀疑是BOOTSTRAP电容的问题,于是实验了不同的电容值。
但无论怎么变换,问题仍然没有被解决。
由于手头没有4148,使用了IN5819作为续流二极管,按道理5819只会比4148更好,不应该成为问题的原因。
由于手头2104只有6片,而所有的都上电并且发热过,于是重新购买了一批2104。
在这里感谢周顺同学,那天刚好他毕业考考好,帮我到科技京城买了2104。
更换2104后,电路工作正常。
周顺看了看我原来的2104,恍然大悟:原来的芯片是97年前的旧货。
马达欢快地转了起来。
由于540的内阻要比298小很多,马达的加速度明显提高,变向时电刷更是发出了闪亮的火星。
回到家后用示波器开始研究高端MOS的G端驱动电压波形。
发现在EN端为高的初期,高端MOS的驱动电压突然升至比VCC高10V。
此时强推动作用起效。
但随着时间的流逝,该电压逐渐衰减为VCC,MOS的导通程度越来越不完全。
基于MC9S12单片机的智能车数据远程传输系统
基于MC9S12单片机的智能车数据远程传输系统孟腾;章政【摘要】文中设计了一种基于MC9S12单片机的智能车数据远程传输系统.该系统以Nordic公司生产的2.4GHz频段射频芯片NRF24L01作为数据无线收发芯片,以Freescale单片机MC9S12为控制单元,采用交互式“主从”结构,实现了运动状态下模型车的相关参数和运动轨迹的远程传输和控制.实际运行结果表明,所设计的模型车数据传输准确率高、行驶速度快、易于控制.【期刊名称】《电子设计工程》【年(卷),期】2013(021)009【总页数】4页(P91-94)【关键词】远程传输;MC9S12单片机;无线收发;智能车模型【作者】孟腾;章政【作者单位】武汉科技大学信息科学与工程学院,湖北武汉430081;武汉科技大学信息科学与工程学院,湖北武汉430081【正文语种】中文【中图分类】TP302我国已经成为世界上规模最大的汽车市场之一,汽车在国民经济生产和生活中的重要作用日益显著。
近年来,如何使车辆驾驶更加安全、高效、环保、舒适的研究越来越受到各国研究学者关注[1]。
由相关的无线通信网络电路实时地处理这些信息。
例如,给驾驶员提供道路的提示、警告等信息。
这样,可大大减少了驾驶员由于疲劳等因素带来的驾驶危险,增强了道路交通以及驾驶员人身的安全性;另外,一旦发生车辆故障、交通堵塞或交通事故,将给车辆调度、乘客出行带来不便。
随着社会的快速发展和商业化进程的加速,越来越多的行业和部门需要掌握车辆或其它移动目标的实时信息并能远程控制目标。
这类需求使得车辆数据远传控制系统逐渐成为国内外的研究热点。
车辆数据远传控制系统通过站点终端及时将车辆信息及行车信息发送到调度站,并实时显示车辆及道路信息,将实现科学合理调度车辆,减少乘客出行不便,并可传递辅助驾驶或避免事故的实时信息,或提供娱乐信息、生活信息等数据服务。
1 车载数据远传控制系统的设计与实现1.1 系统总体设计车载远传控制系统主要包括两部分:智能车模型和远传控制系统。
基于MOS管驱动芯片IR2104介绍
基于MOS管驱动芯片IR2104介绍
IR2104(S)是高电压,高速功率MOSFET和IGBT驱动器与依赖高和低侧参考输出通道。
逻辑输入与标准CMOS或LSTTL输出兼容,降低到3.3V逻辑。
输出驱动器具有高脉冲电流缓冲器级,用于最小驱动交叉导通。
该浮动通道可用于驱动从10到600V的高侧配置的N沟道功率MOSFET或IGBT。
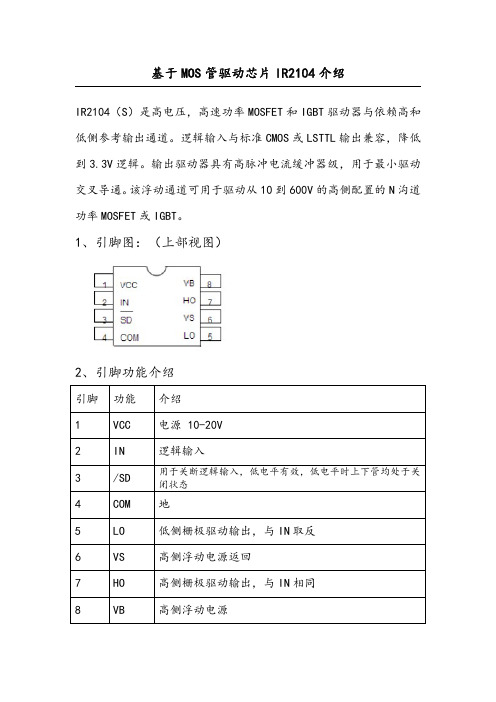
1、引脚图:(上部视图)
2、引脚功能介绍
引脚功能介绍
1VCC电源10-20V
2IN逻辑输入
3/SD用于关断逻辑输入,低电平有效,低电平时上下管均处于关闭状态
4COM地
5LO低侧栅极驱动输出,与IN取反
6VS高侧浮动电源返回
7HO高侧栅极驱动输出,与IN相同
8VB高侧浮动电源
3、MOS管内部原理
4、时序图
当/SD为1时,HO=IN;LO取反IN,
当/SD为0时,不管IN输入什么,HO和LO都为0。
5、典型连接
其中:二极管可以选用1N5819,左侧电容可以选用10UF,右侧电容可以选用1.5uf,两个电阻可选用20R。
STM32+IR2104S的H桥电机驱动电路详解

STM32+IR2104S的H桥电机驱动电路详解电机:俗称“马达”,依据电磁感应定律实现电能转换或传递的一种电磁装置。
包括:电动机和发电机。
电动机在电路中是用字母M表示,它的主要作用是产生驱动转矩;作为用电器或各种机械的动力源,发电机在电路中用字母G表示,它的主要作用是利用机械能转化为电能。
电机控制:对电机的启动、加速、运转、减速及停止进行的控制。
1.直流有刷电机直流有刷电机(Brushed DC,简称BDC),由于其结构简单,操控方便,成本低廉,具有良好的扁动和调速性能等优势,被广泛应用于各种动力器件中,小到玩具,按钮调节式汽车座椅,大到印刷机械等生产机械中都能看到它的身影。
直流电源的电能通过电刷和换向器进入电枢绕组,产生电枢电流,电枢电流产生的磁场与主磁场相互作用产生电磁转矩,使电机旋转带动负载。
优点:价格低、控制方便缺点:由于电刷和换向器的存在,有刷电机的结构复杂,可靠性差,故障多,维护工作量大,寿命短,换向火花易产生电磁干扰。
2.步进电机步进电机就是一种将电脉冲转化为角位移的执行机构;更通俗一点讲:当步进驱动器接收到个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度。
我们可以通过控制脉事的个数来控制电机的角位移量,从而达到精确定位的目的;.同时还可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。
优点:控制简单,低速扭矩大,成本低;缺点:步进电机存在空载启动频率,所以步进电机可以低速正常运转,但若高于一定速度时就无法启动,并伴有尖锐的啸叫声;同时,步进电机是开环控制,控制精度和速度都没有伺服电机那么高。
3.伺服电机伺狠电机广泛应用于各种控制系统中,能将输入的电压信号(或者脉冲数)“转换为电机轴上的机械输出量,拖动被控制元件,从而达到控制目的。
伺服电机系统见下图。
一般地,、要求转矩能通过控制器输出的电流进行控制;电机的反映要快、体积要小、控制功率要小。
伺服电机主要应用在各种运动控制系统中,尤其是随动系统。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
IR2104芯片驱动电路实现智能车差速控制方案
由于本人主要是搞软件的,所以硬件方面不是很了解,但是为了更好地相互学习,仅此整理出一份总结出来,有什么错误的地方还请大家积极的指出!供大家一起参考研究!
我们做的智能小车,要想出色的完成一场比赛,需要出色的控制策略!就整个智能车这个系统而言,我们的被控对象无外乎舵机和电机两个!通过对舵机的控制能够让我们的小车实时的纠正小车在赛道上的位置,完成转向!当然那些和我一样做平衡组的同学不必考虑舵机的问题!而电机是小车完成比赛的动力保障,同时平衡组的同学也需要通过对两路电机的差速控制,来控制小车的方向!所以选一个好的电机驱动电路非常必要!
常用的电机驱动有两种方式:一、采用集成电机驱动芯片;二、采用MOSFET和专用栅极驱动芯片自己搭。
集成主要是飞思卡尔自己生产的33886芯片,还有就是L298芯片,其中298是个很好的芯片,其内部可以看成两个H桥,可以同时驱动两路电机,而且它也是我们驱动步进电机的一个良选!由于他们的驱动电流较小(33886最大5A持续工作,298最大2A持续工作),对于我们智能车来说不足以满足,但是电子设计大赛的时候可能会用到!所以想要详细了解他们的同学可以去查找他们的数据手册!在此只是提供他们的电路图,不作详细介绍!
33886运用电路图
下面着重介绍我们智能车可能使用的驱动电路。
普遍使用的是英飞凌公司的半桥驱动芯片BTS7960搭成全桥驱动。
其驱动电流约43A,而其升级产品BTS7970驱动电流能够达到70几安培!而且也有其可替代产品BTN7970,它的驱动电流最大也能达七十几安!其内部结构基本相同如下:
每片芯片的内部有两个MOS管,当IN输入高电平时上边的MOS管导通,常称为高边MOS管,当IN输入低电平时,下边的MOS管导通,常称为低边MOS管;当INH为高电。