过程仿真中稳态模型的动态补偿方法
静止无功补偿系统的建模与仿真讲解

摘要电力系统的各节点无功功率平衡决定了该节点的电压水平,由于当今电力系统的用户中存在着大量无功功率频繁变化的设备;如轧钢机、电弧炉、电气化铁道等。
同时用户中又有大量的对系统电压稳定性有较高要求的精密设备:如计算机,医用设备等。
因此迫切需要对系统的无功功率进行补偿。
在电力系统中,对无功功率的控制,可以提高功率因数,稳定电网电压,改善供电质量。
电力系统中的无功补偿装置从最早的电容器开始发展到今天,历经了电容器、同步调相机、静止无功补偿装置和SVG等几个不同的阶段。
本文讨论的静止无功补偿装置(SVC)属于晶闸管投切型并联补偿设备,它是在机械投切式并联电容和电感基础上,采用大容量晶闸管代替断路器等触点式开关而发展起来的。
MATLAB软件中的Simulink给用户提供了用方框图进行建模的模型接口,与传统的仿真软件相比,具有更直观、方便和灵活的优点。
Simulink中的电力系统模块库包含了各种交/直流电源、大量电气元器件和电工测量仪表以及分析工具等。
利用这些模块可以模拟电力系统运行和故障的各种状态,并进行仿真和分析。
关键词:静止无功补偿;MATLAB仿真;Simulink;1目录摘要 (1)静止无功补偿系统的建模与仿真 (3)1. 无功补偿技术的分析 (3)1.1静止无功补偿的概念 (3)1.2无功补偿技术的发展历程 (3)1.3无功补偿的意义和作用 (4)1.4无功补偿的原则及方式 (5)1.5配电网无功补偿存在的问题 (6)2. 静止无功功率补偿器 (6)2.1 SVC的类型及工作原理 (6)2.2 晶闸管控制电抗器的基本原理 (7)2.3 晶闸管控制电抗器和电容器的配合使用 (10)3 基于晶闸管的静止无功补偿装置仿真 (11)3.1 SVC仿真模块的建立 (11)3.2 SVC仿真结果与分析 (12)4 结论 (13)参考文献: (14)2静止无功补偿系统的建模与仿真1.无功补偿技术的分析1.1静止无功补偿的概念所谓静止无功补偿是指用不同的静止开关投切电容器或电抗器,使其具有吸收和发出无功电流的能力,用于提高电力系统的功率因数,稳定系统电压,抑制系统振荡等功能。
高速列车运行稳定性预测模型和振动补偿算法
高速列车运行稳定性预测模型和振动补偿算法高速列车的运行稳定性是保障运输安全和乘客舒适度的关键因素之一。
为了提高高速列车的运行稳定性,研究人员开发了多种预测模型和振动补偿算法。
本文将介绍其中一些常用的方法和技术。
首先,为了预测高速列车的运行稳定性,研究人员通常会采用系统动力学建模的方法。
系统动力学是研究系统随时间演化规律的学科,它可以描述列车运行过程中各个部件之间的相互作用。
基于系统动力学建模的方法,可以建立高速列车的数学模型,从而预测列车在不同运行条件下的稳定性。
这些模型通常包括列车的质量、运动学参数、轮轨接触力以及其他影响因素等。
其次,一些研究人员还开发了基于机器学习的高速列车运行稳定性预测模型。
机器学习是一种通过从数据中学习规律和模式来进行预测和决策的技术。
通过收集和分析高速列车运行过程中的大量数据,可以训练机器学习模型来预测列车的运行稳定性。
这些模型通常使用支持向量机、决策树、随机森林等算法,能够利用各种输入特征来预测列车的稳定性。
此外,振动补偿算法也是提高高速列车运行稳定性的关键技术之一。
高速列车在运行过程中会产生各种振动,这些振动不仅会影响乘客的乘坐舒适度,还可能对列车的性能和安全性产生不利影响。
因此,研究人员致力于开发各种振动补偿算法,以减少列车振动对乘客和列车的影响。
常用的振动补偿算法包括主动控制算法和被动控制算法。
主动控制算法通过在列车结构中嵌入传感器和执行器,实时监测和调整列车的振动状态。
被动控制算法则通过在列车结构中引入吸振材料和减振器等装置,消除列车振动产生的能量。
最后,为了验证高速列车运行稳定性的预测模型和振动补偿算法的有效性,研究人员通常会进行大量的实验和仿真测试。
通过收集真实列车的运行数据,可以验证预测模型的准确性和可靠性。
同时,通过在实验室或仿真环境中进行振动测试,可以评估振动补偿算法的效果和性能。
总结起来,高速列车运行稳定性预测模型和振动补偿算法是提高高速列车运行安全和乘客舒适度的重要手段。
发动机推力压力的测量

发动机推力压力的测量发布时间:2022-11-08T05:21:01.207Z 来源:《福光技术》2022年22期作者:付伟李刚于恩泉姜春茂[导读] 推力是发动机最重要的性能参数之一,目前普遍使用基于稳态模型的方法测量。
该方法测量值包含动架的振动干扰、惯性干扰和运动阻尼干扰,使得发动机稳态时测量结果包含有波动干扰,发动机过渡态时测量滞后,影响发动机稳态和过渡态性能评估。
北方华安工业集团有限公司摘要:针对发动机高速旋转模拟试验系统,介绍了一种固体火箭发动机燃烧室压强测量方法,并研制了一套存储测试装置,该装置以STM32为控制核心,由信号调理模块、存储模块和无线传输模块等组成。
当前经测量获取的推力-时间数据计算而间接得到的压强数据误差较大,通过对发动机燃烧室压强的直接测量能有效地规避因摩擦对推力的影响而导致的压强测试不准确的弊端。
该装置通过螺纹与高速主轴的末端相连,能够检测并记录发动机工作过程中的压强数据,试验后可以取下测试装置或通过无线传输将检测的数据发送给上位机进行显示,为之后固体火箭发动机结构的设计和改进提供重要的实验依据。
关键词:存储测试;固体火箭发动机;高速旋转;无线传输1 引言推力是发动机最重要的性能参数之一,目前普遍使用基于稳态模型的方法测量。
该方法测量值包含动架的振动干扰、惯性干扰和运动阻尼干扰,使得发动机稳态时测量结果包含有波动干扰,发动机过渡态时测量滞后,影响发动机稳态和过渡态性能评估。
国外对此开展了推力测量动力学特性研究、动态测量特性检验试验及测量结果数字补偿等研究,实现了推力的动态测量。
国内,欧阳华兵等开展了姿控发动机推力测量系统的动态建模与补偿研究,其仿真结果表明动态补偿能改善推力测量系统的动态性能,但在发动机动态推力测量方面还未见报道。
本文研究了发动机动态推力快速测量方法和稳态推力高精度测量方法及其优选算法,实现了推力的高精度、快速测量。
2 高空台推力测量系统建模某高空台推力测量系统由动架、推力预载、推力现场校准、推力测量、附加阻力测量等多个子系统组成,舱内推力测量系统简化结构如图1所示。
静止无功补偿系统的建模与仿真
静止无功补偿系统的建模与仿真摘要:在配电网中,为了提高供电质量,减少负荷对电网的不利影响,传统的做法时在被补偿的节点上安装电容器、电抗器或者两者组合来向系统注入或吸收无功功率,这些电容器、电抗器是采用传统的机械开关来控制投入或退出的。
静止无功补偿装置(SVC)是一种能够快速、可靠地控制线路电压的装置。
SVC通常会在正常稳态和意外情况下将电压调节和控制到所需的设定值,从而在系统意外情况后提供动态、快速响应的无功功率。
此外,SVC还可以提高输电能力,减少损耗,减轻有功功率振荡,防止失载时的过电压。
关键词:静止无功补偿,SVC,TCR、TSC1 SVC的原理和特性SVC的构成形式比较多样,但基本元件为晶闸管控制的电抗器(TCR)和晶闸管投切的电容器(TSC)。
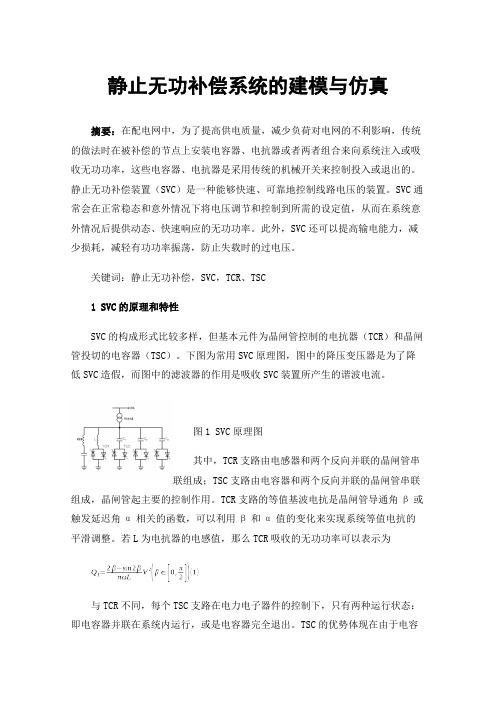
下图为常用SVC原理图,图中的降压变压器是为了降低SVC造假,而图中的滤波器的作用是吸收SVC装置所产生的谐波电流。
图1 SVC原理图其中,TCR支路由电感器和两个反向并联的晶闸管串联组成;TSC支路由电容器和两个反向并联的晶闸管串联组成,晶闸管起主要的控制作用。
TCR支路的等值基波电抗是晶闸管导通角β或触发延迟角α相关的函数,可以利用β和α值的变化来实现系统等值电抗的平滑调整。
若L为电抗器的电感值,那么TCR吸收的无功功率可以表示为与TCR不同,每个TSC支路在电力电子器件的控制下,只有两种运行状态:即电容器并联在系统内运行,或是电容器完全退出。
TSC的优势体现在由于电容器的切投是由电力电子器件控制完成的,它比传统的机械切投的电容器相应更加迅速,其动态特性可以满足控制系统的需要。
若C为电容器的电容值,当TSC支路投入到系统中后,其输入系统的无功功率可以表示为SVC装置整体向系统输入的无功功率可以由(1)式和(2)式表示为由此可见,当时,连续、平滑的调节向系统输入的无功功率是可以实现的。
同时,可以通过在SVC装置中增加TSC之路的数量,从而扩大SVC的可调节范围,也兼顾了这种调节的连续性。
电动汽车无线充电技术研究综述

电动汽车无线充电技术研究综述赵争鸣;刘方;陈凯楠【摘要】Wireless charging technology for electric vehicles (EV) has become more and more popular for its advantages of operation safety, flexibility, convenience and low cost. This paper reviews current researches and key points on the technology from the aspects of power transmission coils, compensation networks and power electronics converters as well as their control methods. Hot issues and the future of wireless charging technology are discussed in the end.%无线充电技术以其运行安全、灵活便捷和低维护成本等优点,受到越来越多的关注,是未来电动汽车供电技术的发展趋势之一。
本文从传输线圈结构、谐振网络及系统特性、电力电子变换器及其控制方法三个角度对当前的研究现状和热点问题进行了综述,分析讨论了亟待解决的问题及今后的发展趋势。
【期刊名称】《电工技术学报》【年(卷),期】2016(031)020【总页数】11页(P30-40)【关键词】电动汽车;无线充电;磁耦合谐振【作者】赵争鸣;刘方;陈凯楠【作者单位】电力系统及发电设备安全控制和仿真国家重点实验室清华大学北京100084;电力系统及发电设备安全控制和仿真国家重点实验室清华大学北京100084;电力系统及发电设备安全控制和仿真国家重点实验室清华大学北京100084【正文语种】中文【中图分类】TM910.6;U469.72随着全球环境和能源问题的日渐凸显,发展和普及电动汽车等新能源汽车变得越来越重要。
基于动态补偿器的电力系统电压稳定和暂态稳定分析

基于动态补偿器的电力系统电压稳定和暂态稳定分析方琼;盛义发【摘要】随着我国电网向大机组、大电网、高电压和远距离输电发展,电力系统的稳定问题变得日益突出.为改善系统电压稳定和故障后系统的暂态稳定性,将两种动态补偿装置--静止无功补偿器(SVc)和静止同步补偿器(STATCOM)应用于电力系统中,以实时动态方式向系统提供无功补偿.利用MATLAB/SIMULINK平台建立了补偿系统仿真模型,验证了SVC、STATCOM对维持电力系统稳定性的作用,并对两者进行了比较,指出STAT℃OM具有更广阔的应用前景.【期刊名称】《机电元件》【年(卷),期】2013(033)001【总页数】5页(P35-38,55)【关键词】静止无功补偿器(SVC);静止同步补偿器(STATCOM);无功补偿;电压稳定【作者】方琼;盛义发【作者单位】南华大学电气工程学院,湖南衡阳421001【正文语种】中文【中图分类】TN7841 引言随着我国电网"西电东送,南北互供,全国联网"战略的实施和电力市场化改革的进行,电力系统面向大机组、大电网、高电压和远距离输电发展,呈现出了更为复杂的动态行为,其稳定性遭到破坏对社会和国民经济所产生的负面影响也将更为巨大。
因此,如何维持电力系统稳定性,提高电能质量受到更广泛的关注。
随着电力电子技术的发展,在长距离输电线中选择合适的地点安装柔性交流输电装置 (FACTS)可以满足增大输送能力,保持输电系统稳定和优化系统运行[1-4]。
本文将SVC、STATCOM接入电力系统中,作为实时动态补偿器向系统提供无功补偿,利用MATLAB/SIMULINK建立仿真模型,验证了动态补偿器对改善系统电压稳定和暂态稳定的作用,并对两者进行比较,指出STATCOM是未来FACTS装置的主要发展方向。
2 动态补偿器的原理与数学模型2.1 静止无功补偿器 (SVC)的原理与数学模型静止无功补偿器 (SVC)是20世纪70年代初期发展起来的新型无功补偿技术,是通过控制晶闸管的导通角来快速调节电抗器 (TCR)的大小或投切电容器 (TSC)以及二者的混合装置,对调节负荷功率因数、稳定和平衡系统电压、消除流向系统的高次谐波电流、平衡三相负荷等有显著的作用[5-6]。
稳态误差补偿方法

稳态误差补偿方法稳态误差是指在系统达到稳定工作状态后产生的偏差,通常由于系统的非线性特性、外界干扰或传感器误差等因素所引起。
稳态误差的存在会影响系统的准确性和性能,在一些对精度要求较高的应用中尤为重要。
为了解决稳态误差的问题,工程师们提出了各种不同的补偿方法。
本文将介绍几种常见的稳态误差补偿方法。
一、增益调整法增益调整法是一种简单直接的稳态误差补偿方法。
它通过调整系统的增益参数来改变系统的响应特性,从而减小或消除稳态误差。
具体而言,对于系统输出与输入之间的误差,可以通过增大或减小系统的放大倍数来达到补偿的目的。
增益调整法是一种常用的误差补偿方法,适用于线性系统和部分非线性系统。
二、积分补偿法积分补偿法是一种基于误差积分的稳态误差补偿方法。
它通过对误差进行积分运算,将积分结果作为修正量引入系统中,从而实现对稳态误差的补偿。
积分补偿法适用于系统存在恒定误差的情况,通过积分运算,可以逐步减小并最终消除误差。
然而,积分补偿法也存在一定的问题,尤其是对于非线性系统,可能会引入过度补偿和系统不稳定等问题。
三、滑模控制法滑模控制法是一种基于滑模面思想的稳态误差补偿方法。
它通过引入滑模面来实现快速有效地消除误差。
具体而言,滑模控制法将误差作为滑模面的状态变量,通过设计合理的控制律使系统状态与滑模面的交点快速收敛,从而达到对稳态误差的补偿。
滑模控制法具有很好的鲁棒性和快速响应的特点,适用于一些非线性系统和具有较大扰动的系统。
四、自适应控制法自适应控制法是一种根据系统实时状态和性能要求来调整控制参数的稳态误差补偿方法。
它通过引入自适应算法,实现对系统参数的实时调整和优化,从而减小稳态误差并提高系统的性能。
自适应控制法可以根据实际情况进行参数补偿,并对系统动态特性作出相应调整,具有较好的适应性和优化效果。
然而,自适应控制法也存在着计算复杂度高和对系统模型要求较高的问题。
总结:稳态误差是系统工程中常见的问题,但可以通过合适的补偿方法来解决。
天平可控串联补偿装置的动态模型及时域仿真

天平可控串联补偿装置的动态模型及时域仿真曾星宏【摘要】根据天平串联补偿一次设备的实际参数建立串联补偿的暂态模型;研究可控串联补偿装置(thyristorcontrolled series compensator,TCSC)的闭环控制系统的技术细节,并建立完整的仿真模型.以天平双回线路串联补偿模型的外部电网等值系统模拟正常运行、外部电网故障、本线路故障等情况下TCSC的动态运行特性,给出仿真计算结果.将天平TCSC的实际运行情况与仿真计算结果进行对比分析,证明该动态模型能真实模拟实际TCSC的运行状态.【期刊名称】《广东电力》【年(卷),期】2011(024)005【总页数】4页(P13-16)【关键词】可控串联补偿装置;动态模型;时域仿真【作者】曾星宏【作者单位】中国南方电网超高压输电公司南宁局,广西南宁 530021【正文语种】中文【中图分类】TM714.3随着南方电网西电东送电量的快速增长,有效地利用有限的输电通道来提高电网的输电极限成为热点研究课题。
天平可控串联补偿装置(thyristor controlled series compensator,TCSC)位于南方电网西电东送交流主通道500 kV天平Ⅰ、Ⅱ线上,是目前世界上应用最有效、最成功的灵活交流输电技术之一,是我国第一个投入运行的500 kV可控串联补偿设备。
天平TCSC的补偿度为40%,其中固定部分补偿度为35%,可控部分补偿度为5%。
TCSC总容量(双回)为2×400 Mvar,其中固定部分为2×350 Mvar,可控部分为2×50 M var。
TCSC中的晶闸管阀使用了先进的光直接触发技术,通过控制触发角来改变输电线路的阻抗,有效地提高了西电东送的输电极限,是保证南方电网安全稳定运行的重要技术措施。
本文根据天平串联补偿一次设备的实际参数搭建串联补偿的暂态模型;根据研究需要,对南方电网的实际网络进行等值化简,构建了一个包含天平TCSC的研究系统;根据SIMADYN-D闭环控制逻辑研究闭环控制系统的技术细节;对研究系统进行仿真计算,并与天平TCSC的实际运行状态进行对比。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Dy n a mi c c o mp e n s a t i o n o f s t e a d y — s t a t e mo d e l i n p r o c e s s s i mu l a t i o n
Z HA0 Yi — d i n g , MI AO F e n g - j u n , W ANG Ho n g — l i 。 ,Z HE N G Qi u — s h e n g ,C HU J i — z h e n g 。
赵 一 丁 ,苗凤 君 ,王 洪利 。 ,郑秋 生 ,楚 纪正 。
( 1 . 中原工 学院 计算机 学 院 ,河 南 郑州 4 5 0 0 0 7 ;2 . 中原 工 学院 经济管理 学 院,
河南 郑州 4 5 0 0 0 7 ;3 . 北京化 工 大学 信 息科 学与技 术 学院 ,北 京 1 0 0 0 2 9 )
摘 要 :针 对稳 态数 学模 型动 态补 偿 的 实践 问题 ,提 出 了适 用 于 工 业 生 产过 程 动 态仿 真 的 新 的 动 态补 偿 方 法 。稳 态模 型 在
过程仿真应用时 ,依 据实际生产的对应过程数据 来确定其动态特性及 动态补偿的具体 算式,设 计 了稳 态数 学模 型动 态补偿
3 .C o l l e g e o f I n f o r ma t i o n S c i e n c e a n d T e c h n o l o g y , B e i j i n g Un i v e r s i t y o f C h e mi c a l T e c h n o l o g y ,B e i j i n g 1 0 0 0 2 9 , C h i n a )
Ab s t r a c t : Ai me d a t t h e d i f f i c u l t i e s o f d y n a mi c c o mp e n s a t i o n o f S t e a d y - s t a t e mo d e l ,a n i n n o v a t i v e a p p r o a c h o f d y n a mi c c o mp e n s a — t i o n f o r i n d u s t r i a l p r o c e s s s i mu l a t i o n i s p r o p o s e d .Fo r t h e s t e a d y s t a t e mo d e l ,d y n a mi c c h a r a c t e r i s t i c s a n d t h e p a r a me t e r s o f d y
方 法 的 逻 辑 流 程 ,并 在 动 态补 偿 中 考虑 实 际噪 声 的影 响 。结 合 实际 案例 表 明 了该 方 法在 实 践 中的 实施 步骤 ,该 方 法 能 够 显 著 提 高过 程 仿 真 的 动 态 精 度 。 稳 态模 型 动 态补 偿 的过 程 ,应 与 整 个 仿 真 系统 开发 过 程 中的其 它相 关 活 动 协 调 实施 。 关 键 词 :动 态 补 偿 ;动 态 精度 ;仿 真建 模 ;过 程 仿 真 ;噪 声 中图 法 分 类 号 :T P 3 9 1 . 9 文献 标 识 号 :A 文 章 编 号 : 1 0 0 0 — 7 0 2 4( 2 0 1 3 )1 1 3 9 8 2 — 0 6
n a mi c c o mp e n s a t i o n c a n b e e s t i ma t e d a c c o r d i n g t o t h e c o r r e s p o n d i n g a c t u a l d a t a o f p r o c e s s .Th e l o g i c p r o c e s s o f d y n a mi c c o mp e n s a t i o n o f s t e a d y s t a t e me t h o d i s s h o wn .An d a c t u a l n o i s e i s p r o c e s s e d i n t h e d y n a mi c c o mp e n s a t i o n .C o mb i n e d wi t h t h e a c t u a l
( 1 .Co l l e g e o f C o mp u t e r S c i e n c e ,Z h o n g y u a n Un i v e r s i t y o f Te c h n o l o g y,Z h e n g z h o u 4 5 0 0 0 7,Ch i n a ; 2 .Co l l e g e o f Ec o n o mi c s a n d Ma n a g e me n t ,Z h o n g y u a n Un i v e r s i t y o f Te c h n o l o g y,Z h e n g z h o u 4 5 0 0 0 7 ,C h i n a ;
2 0 1 3年 1 1 月
计 算机 工程 与设 计
COM PUTER ENGI NE ERI NG AND DES I GN
ቤተ መጻሕፍቲ ባይዱ
No ve .2 01 3
第 3 4卷
第 1 l 期
Vo 1 . 3 4 NO . 1 1
过 程 仿 真 中 稳 态模 型 的动 态补 偿 方 法