CSC-V3.1新松工业机器人通用操作手册
新松机器人操作培训资料

新松操作培训资料新松操作培训资料
1、简介
- 新松概述
- 操作的重要性
- 本文档的目的和适用范围
2、操作基础知识
- 分类和类型
- 的基本结构和组成部件
- 的工作原理和运动方式
3、操作安全事项
- 操作的安全原则
- 工作区域的设置和标识
- 操作时应注意的安全事项
- 急救措施和紧急停机方法
4、操作流程
- 开机及初始化步骤
- 操作面板和控制器介绍
- 操作程序的编写和加载
- 操作指令和常用功能的使用
5、日常维护和保养
- 的日常检查和保养流程
- 周边设备的维护和保养
- 故障排除和常见问题处理方法
6、应用案例分析
- 工业生产中的应用案例
- 在军事和医疗领域的应用案例
- 在服务行业中的应用案例
7、法律名词及注释
- 著作权:指原创作品的合法保护权利,包括文字、图像、视频等。
- 专利权:指对发明的独有权利,保护创新的技术和发明的独特性。
- 商标权:指对商标的独占使用权,用于区分不同企业的产品和服务。
- 消费者权益保护法:规定了消费者的基本权益和企业的责任和义务。
8、附件
- 操作手册(附件A)
- 安全操作流程图(附件B)
- 故障排查表(附件C)。
工业机器人操作指引

工业机器人应用一机器人示教单元使用1.示教单元的认识使用示教单元调整机器人姿势2.”位置,双手拿起,先开关打到“MANUAL在机器人控制器上电后使用钥匙将2.1MODE”开关扳向一侧,直到听到enable将示教单元背部的“TB ENABLE”按键按下。
再用手将“”按”键使机器人伺服电机开启,此时“一声“卡嗒”为止。
然后按下面板上的“SERVOF3键上方对应的指示灯点亮。
关节对应的按键可”键,进入关节调整界面,此时按动J1--J62.2按下面板上的“JOG↓”能分别升高和降低运行机器人速度。
↑”和“OVRD使机器人以关节为运行。
按动“OVRD 嘀”报警声。
各轴对应动作方向好下图所示。
当运行超出各轴活动范围时发出持续的“嘀“三轴直调整”、TOOL、”键可分别进行“”“”“”按“2.3F1、F2、F3、F4“直交调整”“交调整”和“圆桶调整”模式,对应活动关系如下各图所示:直交调整模式TOOL调整模式三轴直交调整模式圆桶调整模式2.4在手动运行模式下按“HAND”进入手爪控制界面。
在机器人本体内部设计有四组双作用电磁阀控制电路,由八路输出信号OUT-900――OUT-907进行控制,与之相应的还有八路输入信号IN-900――IN-907,以上各I/O信号可在程序中进行调用。
按键“+C”和“-C”对应“OUT-900”和“OUT-901”按键“+B”和“-B”对应“OUT-902”和“OUT-903”按键“+A”和“-A”对应“OUT-904”和“OUT-905”按键“+Z”和“-Z”对应“OUT-906”和“OUT-907”在气源接通后按下“-C”键,对应“OUT-901”输出信号,控制电磁阀动作使手爪夹紧,对应的手爪夹紧磁性传感器点亮,输入信号到“IN-900”;按下“+C”键,对应“OUT-900”输出信号,控制电磁阀动作使手爪张开。
对应的手爪张开磁性传感器点亮,输入信号到“IN-901”。
3.使用示教单元设置坐标点3.1先按照实训2的内容将机器人以关节调整模式将各关节调整到如下所列:J1:0.00 J5:0.00J2: -90.00 J6:0.00J3:170.00J4:0.003.2先按“FUNCTION”功能键,再按“F4”键退出调整界面。
工业机器人操作指南
工业机器人应用一机器人示教单元使用1.示教单元的认识2.使用示教单元调整机器人姿势2.1在机器人控制器上电后使用钥匙将MODE开关打到“MANUAL”位置,双手拿起,先将示教单元背部的“TB ENABLE”按键按下。
再用手将“enable”开关扳向一侧,直到听到一声“卡嗒”为止。
然后按下面板上的“SERVO”键使机器人伺服电机开启,此时“F3”按键上方对应的指示灯点亮。
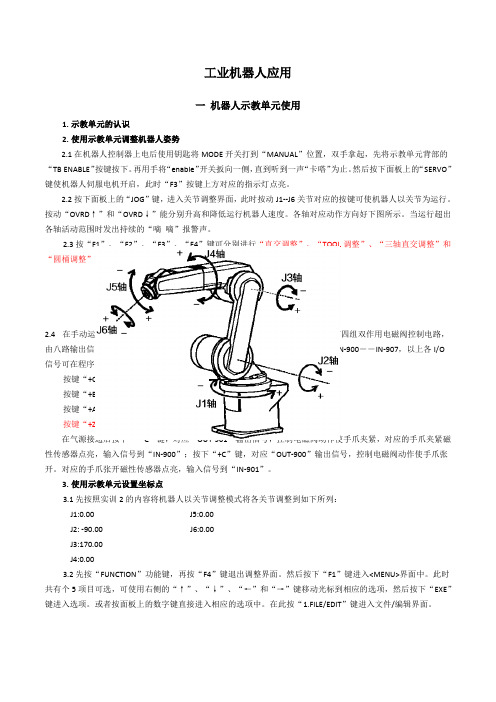
2.2按下面板上的“JOG”键,进入关节调整界面,此时按动J1--J6关节对应的按键可使机器人以关节为运行。
按动“OVRD↑”和“OVRD↓”能分别升高和降低运行机器人速度。
各轴对应动作方向好下图所示。
当运行超出各轴活动范围时发出持续的“嘀嘀”报警声。
2.3按“F1”、“F2”、“F3”、“F4”键可分别进行“直交调整”、“TOOL调整”、“三轴直交调整”和“圆桶调整”模式,对应活动关系如下各图所示:直交调整模式TOOL调整模式三轴直交调整模式圆桶调整模式2.4在手动运行模式下按“HAND”进入手爪控制界面。
在机器人本体内部设计有四组双作用电磁阀控制电路,由八路输出信号OUT-900――OUT-907进行控制,与之相应的还有八路输入信号IN-900――IN-907,以上各I/O信号可在程序中进行调用。
按键“+C”和“-C”对应“OUT-900”和“OUT-901”按键“+B”和“-B”对应“OUT-902”和“OUT-903”按键“+A”和“-A”对应“OUT-904”和“OUT-905”按键“+Z”和“-Z”对应“OUT-906”和“OUT-907”在气源接通后按下“-C”键,对应“OUT-901”输出信号,控制电磁阀动作使手爪夹紧,对应的手爪夹紧磁性传感器点亮,输入信号到“IN-900”;按下“+C”键,对应“OUT-900”输出信号,控制电磁阀动作使手爪张开。
对应的手爪张开磁性传感器点亮,输入信号到“IN-901”。
3.使用示教单元设置坐标点3.1先按照实训2的内容将机器人以关节调整模式将各关节调整到如下所列:J1:0.00 J5:0.00J2: -90.00 J6:0.00J3:170.00J4:0.003.2先按“FUNCTION”功能键,再按“F4”键退出调整界面。
新松机器人操作基础培训教程

新松机器人操作基础培训教程一、机器人的基本概念机器人是一种能够代替人类完成一定工作的自动化设备。
它由机械结构、传感器、控制系统和供电系统等组成,并能够按照预定程序执行工作任务。
二、机器人的组成部分1.机械结构:机械结构是机器人的骨架,它提供支持和保护机器人的内部元件。
机械结构由框架、关节、连杆等部件组成。
新松机器人的机械结构一般由铝合金制成,轻巧坚固。
2.传感器:传感器是机器人获取外界信息的重要装置。
新松机器人常用的传感器有视觉传感器、力传感器和位置传感器等。
它们能够帮助机器人判断和调整自身状态,实现更精准的操作。
3.控制系统:控制系统是机器人的大脑,它根据预先设定的程序控制机器人的运动和操作。
新松机器人采用先进的PLC控制系统,能够高效稳定地控制机器人的各个关节。
4.供电系统:供电系统为机器人提供动力,通常采用电力供应。
新松机器人通常需要外部接通电源进行工作。
三、机器人的基本操作1.机器人的启动:确认机器人的电源是否接通,然后按下启动按钮,机器人即可开始工作。
2.机器人的停止:停止机器人的工作时,按下停止按钮,机器人会立即停止运动。
3.机器人的紧急停止:在紧急情况下,按下紧急停止按钮,机器人会立即停止所有动作,并且使机器人断电。
4.机器人的复位:复位是指将机器人恢复到初始状态。
在机器人出现故障或完成一次操作后,通常需要对机器人进行复位操作。
5.机器人的运动:机器人的运动通常通过控制器来实现。
通过控制器上的按钮或者触摸屏,你可以控制机器人的各个关节的运动。
正常情况下,机器人的运动范围应该在设定的工作区域内。
四、机器人的安全操作1.操作前的准备:在操作机器人之前,要确保自己已经熟悉机器人的基本操作,并穿戴好相应的防护设备。
2.规范操作:在操作机器人时,要按照规定的程序和操作流程进行,避免操作错误或者不当操作。
不要随意改变机器人的设定参数,以免造成故障或事故。
3.注意观察:在机器人运动过程中,要时刻观察机器人的动作,确保其运行正常。
工业机器人操作指南

工业机器人应用一机器人示教单元使用1.示教单元的认识2.使用示教单元调整机器人姿势2.1在机器人控制器上电后使用钥匙将MODE开关打到“MANUAL”位置,双手拿起,先将示教单元背部的“TB ENABLE”按键按下。
再用手将“enable”开关扳向一侧,直到听到一声“卡嗒”为止。
然后按下面板上的“SERVO”键使机器人伺服电机开启,此时“F3”按键上方对应的指示灯点亮。
2.2按下面板上的“JOG”键,进入关节调整界面,此时按动J1--J6关节对应的按键可使机器人以关节为运行。
按动“OVRD↑”和“OVRD↓”能分别升高和降低运行机器人速度。
各轴对应动作方向好下图所示。
当运行超出各轴活动范围时发出持续的“嘀嘀”报警声。
2.3按“F1”、“F2”、“F3”、“F4”键可分别进行“直交调整”、“TOOL调整”、“三轴直交调整”和“圆桶调整”模式,对应活动关系如下各图所示:直交调整模式TOOL调整模式三轴直交调整模式圆桶调整模式2.4在手动运行模式下按“HAND”进入手爪控制界面。
在机器人本体内部设计有四组双作用电磁阀控制电路,由八路输出信号OUT-900――OUT-907进行控制,与之相应的还有八路输入信号IN-900――IN-907,以上各I/O信号可在程序中进行调用。
按键“+C”和“-C”对应“OUT-900”和“OUT-901”按键“+B”和“-B”对应“OUT-902”和“OUT-903”按键“+A”和“-A”对应“OUT-904”和“OUT-905”按键“+Z”和“-Z”对应“OUT-906”和“OUT-907”在气源接通后按下“-C”键,对应“OUT-901”输出信号,控制电磁阀动作使手爪夹紧,对应的手爪夹紧磁性传感器点亮,输入信号到“IN-900”;按下“+C”键,对应“OUT-900”输出信号,控制电磁阀动作使手爪张开。
对应的手爪张开磁性传感器点亮,输入信号到“IN-901”。
3.使用示教单元设置坐标点3.1先按照实训2的内容将机器人以关节调整模式将各关节调整到如下所列:J1:0.00 J5:0.00J2: -90.00 J6:0.00J3:170.00J4:0.003.2先按“FUNCTION”功能键,再按“F4”键退出调整界面。
工业机器人操作指南

工业机器人应用一机器人示教单元使用1.示教单元的认识2.使用示教单元调整机器人姿势2.1在机器人控制器上电后使用钥匙将MODE开关打到“MANUAL"位置,双手拿起,先将示教单元背部的“TB ENABLE”按键按下。
再用手将“enable"开关扳向一侧,直到听到一声“卡嗒”为止。
然后按下面板上的“SERVO”键使机器人伺服电机开启,此时“F3"按键上方对应的指示灯点亮。
2.2按下面板上的“JOG"键,进入关节调整界面,此时按动J1——J6关节对应的按键可使机器人以关节为运行。
按动“OVRD↑"和“OVRD↓”能分别升高和降低运行机器人速度。
各轴对应动作方向好下图所示.当运行超出各轴活动范围时发出持续的“嘀嘀”报警声。
2.3按“F1”、“F2”、“F3”、“F4”键可分别进行“直交调整"、“TOOL调整"、“三轴直交调整”和“圆桶调整”模式,对应活动关系如下各图所示:直交调整模式TOOL调整模式三轴直交调整模式圆桶调整模式2.4在手动运行模式下按“HAND"进入手爪控制界面。
在机器人本体内部设计有四组双作用电磁阀控制电路,由八路输出信号OUT—900――OUT-907进行控制,与之相应的还有八路输入信号IN-900――IN-907,以上各I/O信号可在程序中进行调用。
按键“+C”和“-C”对应“OUT—900”和“OUT-901”按键“+B”和“-B”对应“OUT—902”和“OUT-903”按键“+A”和“-A”对应“OUT-904”和“OUT—905”按键“+Z"和“-Z”对应“OUT—906”和“OUT-907”在气源接通后按下“-C”键,对应“OUT-901”输出信号,控制电磁阀动作使手爪夹紧,对应的手爪夹紧磁性传感器点亮,输入信号到“IN—900";按下“+C"键,对应“OUT —900"输出信号,控制电磁阀动作使手爪张开。
工业机器人操作指南
1.示教单元的认识,关闭伺服.机器人直接停止0切换示教单元键的操作为有效或无效。
■[有效/无效]开关2为有效时,放开本开关或强力押下的话, 伺服OFF 且动作中的机器人会直接停止.显示面板 .............. 显示机器人的状态亲各显示各MENU. ⑤ 状态显示灯 ............ 显示示教单元及机器人的状态。
⑥ [F1][F2][F3][F4]健 .. 执行显示在面板的功能显示部的功能。
疗I FUNCTION]键 ........ 变更LCD 上显示的功能口 8 [STOP]键 .............. 中断程序,&机器人减谁停止*9 [OVRD t ][OVRD i ]键….使机器人的速度Override 变化口 [OMRD 打键按下则ovemde 上升. [OVRD U 键按下则override 下降..UUOG 模式便机器人动作。
当输入数字的值时,逬行输入各个数字值. .一边轻Efflenablle switch]—边押上此键的话,机器人伺服ON 口 '按下此聲则,变成监视模式且显示监视MEINU. 按下此健则’变成JOG 摸式且显示JOG 画面。
”按下此縫则,变成抓手操作模式且显示肌手操作画面口 ,示教单元在可输入文字或数字时,[数字/文字]键的功能可以换数字输入S 文字输入。
解除异警口边押下此键再押下[EXEW ,执行程序重首。
■移动光标到各个方向. .在可以数字输入或文字输文时,押下此健的话可以将1个文字删除. .确定输入操作口另外,直接执行时,持续押下此键时,机器人动作口 .在可数字输入或文字输入时,押下此犍的话可以显示数字或文字.2. 使用示教单元调整机器人姿势 2.1在机器人控制器上电后使用钥匙将MODE 开关打到“ MANUAL ”位置,双手拿起,先将示教单元背部的“ TB ENABLE ”按键按下。
再用手将“ enable ”开关扳向一侧,直到 听到一声“卡嗒”为止。
工业机器人操作手册说明书
工业机器人操作手册说明书1. 引言工业机器人是现代工业生产中不可或缺的关键设备之一。
为了确保机器人的高效运行和安全操作,本操作手册旨在为操作人员提供详细的说明和指导。
请在操作之前仔细阅读本操作手册,并根据指示进行操作。
2. 机器人概述工业机器人是一种自动化设备,能够模拟人类的动作完成各种任务。
机器人通常由机械结构、控制系统、能源系统和感知系统等组成。
操作人员应了解机器人的基本组成和工作原理。
3. 机器人安全操作指南3.1 安全防护措施- 在机器人工作区域设置明显的安全警示标志。
- 确保机器人周围没有其他人员,以防止意外伤害发生。
- 穿戴适当的个人保护装备,如安全帽、护目镜和手套。
3.2 操作前检查- 确保机器人的工作区域干净整洁,无障碍物。
- 检查机器人的关键部件,如传感器和执行器,确保其正常工作。
- 检查供电和控制系统,确保无故障。
3.3 操作步骤- 开启机器人电源,并确保控制系统正常启动。
- 通过控制面板选择相应的操作模式。
- 设置机器人的工作路径和速度,确保符合任务需求。
- 开始机器人的自主运行或远程操作。
3.4 紧急情况处理- 在发生紧急情况时,立即按下紧急停机按钮。
- 如果需要人员救援,请立即与相关人员联系。
- 在紧急停机后,等待相关人员对机器人进行维护和修复。
3.5 关机与清洁- 在操作结束后,先关闭机器人的电源。
- 清洁机器人的工作区域,清除残留的工件和杂物。
- 定期对机器人进行维护和保养,确保其长期稳定运行。
4. 常见问题解答4.1 机器人无法启动- 检查电源和控制系统是否正常连接。
- 检查传感器和执行器是否工作正常。
4.2 机器人运行速度过慢- 检查机器人的工作路径和速度设置是否正确。
- 检查机器人的执行器是否需要维护和修复。
4.3 机器人存在工作误差- 检查机器人的传感器和控制系统是否准确。
- 检查机器人的工作路径和姿态设置是否正确。
4.4 机器人发生紧急停机- 检查是否有人员误操作或发生安全隐患。
松下机器人操作说明
产业机器人操作说明书基本操作型号No.YA-1 NA 系列VR Ⅱ系列GⅡ控制器内容1. 结构2. 如何使用示教盒3. 工作时得到的协助 (帮助)4. 示教模式操作 (示教)5. AUTO 模式6. 查看7. 有用的文件编辑功能 8. 错误和警报 9. 图标 10. 次序指令目录使用本产品之前,请仔细阅读本手册并保存本手册以备以后使用。
OM0105045E00(0105045)0108Panasonic机器人VRⅡ系列的"操作手册"系统 名字 描述和备注 用法安全手册 Panasonic机器人是在使用者遵守本手册内容的前提上被设计和制造的。
使用者在使用本列表中其他手册前一定要首先阅读并了解本手册的内容。
本手册解释了与工业机器人相关的基本法律和规则以及在逐步进行安装,维护和修理时的安全规程。
本文件用于机器人安装时的培训程序以及对所有机器人操作人员定期的安全操作培训。
机器人系统操作手册文件解释了标准机器人系统的配置和安装,例如通常的CO2焊接机器人系统。
本文件用于了解机器人系统的配置和安装中通常的系统连接。
机器人本体操作手册本文件解释了机器人本体的运输,安装,连接,初始设定,维护和修理。
文件的内容被限制在设备的硬件。
本文件供从事安装及维护的人员使用。
机器人控制器操作手册本文件解释了机器人控制器的运输,安装,连接,初始设定,维护和修理。
本文件的内容仅限于设备的硬件。
注意)机器人安装时软件的初始设定见"操作手册,高级操作"。
本文件供从事安装及维护的人员使用。
可选设备操作手册本文件解释GⅡ系列可选设备的安装,连接和修理。
本文件的内容仅限于设备的硬件。
注意)机器人安装时软件的初始设定见"操作手册高级操作"。
本文件用于可选设备。
本文件供从事安装及维护的人员使用。
操作手册基本操作本文件针对首次操作 Panasonic GⅡ机器人的操作人员。
本文件解释了基本的机器人功能和基本的机器人焊接操作。
新松机器人操作培训资料
循环语句
使用for和while循环进行重复执行 代码块。
函数与模块
将代码组织成可重用的函数和模块 ,提高代码的可读性和可维护性。
调试技巧
单步调试
使用调试器逐行执行代码,检查每一步的结 果是否符合预期。
断点和观察点
设置断点和观察点以便在特定条件下暂停程 序执行,检查相关变量的值。
日志记录
在代码中添加日志输出,以便跟踪程序的执 行过程和检查潜在问题。
总结词
编程简单、易于操作
详细描述
新松搬运机器人编程简单,易于操作,通过简单的培训 ,员工即可快速掌握机器人的操作技巧,提高工作效率 。
总结词
高性价比、良好的售后服务
详细描述
新松搬运机器人具有高性价比,同时新松提供完善的售 后服务,确保机器人的稳定运行,为企业提供可靠的保 障。
案例二:装配机器人应用
解决方案2
校准机器人运动轨迹
解决方案3
调整机器人安全设置和运行速度
解决方案4
更新机器人固件和软件,确保系统正常运行
06 案例分析与实践
案例一:搬运机器人应用
总结词
高效、准确、稳定
详细描述
新松搬运机器人在生产线物料搬运、仓库货物管理等方 面具有高效、准确、稳定的特点,能够提高生产效率, 降低人工成本,减少人为错误。
新松机器人操作培训资料
汇报人: 202X-12-27
目 录
• 新松机器人简介 • 机器人操作基础 • 编程与调试 • 安全操作规范 • 常见问题与解决方案 • 案例分析与实践
01 新松机器人简介
产品特点
高精度定位
新松机器人采用先进的 定位系统,可以在复杂 环境中实现高精度定位
。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
CSC-V2.2 2013.9.25 增加远程 IO 的配置章节
CSC-V2.3 2013.12.23 2.5.2/2.6.2 章节中增加作业中选择工具坐标和用户坐标 操作;2.7 当前坐标中增加设置功能;6.5.2 用户坐标系设 定内容增加;8.4 其他指令增加;6.6.6 执行开关中按键配 置项增加;6.12 章按键配置功能增加;9 报警信息更改
ES-V3.4 2013.8
增加当前坐标系的查看;增加轴运动禁止功能的说明。
CSC-V2.0 2013.8.26 整理手册版本,手册适用于 RC 软件 SV4;整理时增加原位 内容(6.3),零位内容(6.2 章)增加,工具坐标设定提示 增加,弧焊点焊指令去除;整理 9 章报警信息
CSC-V2.1 2013.8.29 增加报警信息,使之适应 RC 软件 SV4.1.3。
1.3
控制柜........................................................... 9
1.3.1 控制柜外观....................................................... 9
1.3.2 按钮/指示灯介绍.................................................. 9
3
新松工业机器人通用操作手册
CSC-V3.1
目录
1 基本介绍 .............................................8
1.1
机器人系统....................................................... 8
1.2
机器人本体....................................................... 8
CSC-V2.4 2014.2.11 增加 8.2.2 用户变量指令,9.3 提示信息增加 3332 及 3333 信息
CSC-V2.5 2014.2.18 增加报警信息中 818 报警的解决方法
CSC-V2.6 2014.2.24 8.2.2 用户变量相关指令中增加 Get 指令
CSC-V2.7 2014.5.8 更新 6.9 节,增加按位置变量偏移功能;6.9.3.4 节增加; 更新 8.2.2,将用户变量指令分类;增加 8.2.3,位置变量
3.2.3 圆弧运动类型.................................................... 32
3.3
记录运动点...................................................... 34
3.3.1 作业内容显示区域................................................ 34
SIASUN ROBOTICS
新松工业机器人通用操作手册 CSC-V3.1
新松机器人自动化股份有限公司
声明
本说明书对新松工业机器人的构成、操作等内容进行了全面的 说明。请务必在认真阅读并充分理解的基础上操作本机器人。 •维护手册中的图解,为了说明细节取下盖子或安全罩进行绘 制,运转此类部件时,务必按规定将盖子或安全罩还原后,再 按说明书要求运转。 •说明书中的图及照片,为代表性示例,可能与所购买产品不 同。 •说明书有时由于产品改进、规格变更及说明书自身更便于使 用等原因而进行适当的修改。 •客户擅自进行产品改造,不在保修范围之内,本公司概不负 责。
2.6.2 选择用户坐标系号................................................ 26
2.6.2.1 2.6.2.2 2.6.2.3
轴操作运动机器人前的用户坐标系号选择 .................................26 作业中的用户坐标系号选择 .........................................................27 用户坐标系号选择的注意事项 .....................................................27
2.1.1 机器人轴的定义.................................................. 19
2.1.2 机器人坐标系的种类.............................................. 19
2.2
基本操作........................................................ 19
轴操作运动机器人前的工具坐标系号选择 .................................24 作业中的工具坐标系号选择 .........................................................25 工具坐标系号选择的注意事项 .....................................................25
2.3
关节坐标系...................................................... 20
2.4
直角坐标系...................................................... 21
2.5
工具坐标系...................................................... 23
2.7
查看和设置当前坐标系号.......................................... 27
3 示教 ................................................29
3.1
示教前准备...................................................... 29
3.4.2 修改运动速度.................................................... 38
3.5
指令编辑........................................................ 39
3.5.1 指令记录........................................................ 39
1
版本信息
版本
修改时间 修改内容
ES-V3.0 2012.11
工业机器人串口示教盒操作。修改菜单显示位置为 4.0 新版 软件菜单布局。
ES-V3.1 2013.3
增加组 IO 配置、作业整体偏移、中断功能的操作说明。
ES-V3.2 2013.5 ES-V3.3 2013.6
修改中断功能、作业整体偏移说明。增加作业启动条件的说 明。增加远程功能的说明。在指令表中增加中断指令、偏移 指令说明。 在系统设定中增加系统轴数配置。
2.6
用户坐标系...................................................... 25
2.6.1 用户坐标系的定义................................................ 25
1
新松工业机器人通用操作手册
CSC-V3.1
3.3.2 记录运动指令.................................................... 35
3.4
修改运动点...................................................... 37
3.4.1 修改运动位置.................................................... 37
2
相关指令;更新 8.2.1,控制类指令增加内容。 CSC-V2.8 2014.6.6 1.4.3 增加后台作业运行标识;增加 4.1 作业(程序)的分
类;4.2 的修改,增加后台作业的新建与打开,删除软 PLC 作业的新建与打开;增加 5.6 后台程序的执行;7.6 备份和 恢复部分更新;8.1 增加后台作业启动及关闭指令;8.4 增 加 PULSE 指令 CSC-V2.9 2014.9.5 6.10 中断功能部分修改,增加对输入信号下降沿、输出信 号及变量条件的触发,IRQON 指令格式的变化;8.2.1 中 IF 指令格式改变,功能扩展,增加对输出、组 IO 的判断;8.2.1 中 Call 指令格式变化,功能增加;8.2.1 中增加 TRANSON, TRANSOFF 指令;8.2.2.1 中 SET 赋值指令内容增加;8.2.2.2 用户变量计算指令增加自加(减)1 指令,增减 ATAN 指令; 8.3 中 Wait、IRQON、OUT 指令格式改变,Wait 功能扩展, 增加对输出、组 IO 的等待,IRQON 增加对输入信号下降沿、 输出信号及变量条件的触发,OUT 增加 16 位组 IO 输出;8.4 增加 REFP 指令 CSC-V3.0 2014.9.19 增加 6.13 预约启动功能;9.3 提示信息增加预约启动功能 提示信息 CSC-V3.1 2014.10.13 7.2.3 中增加安全门输入信号和主程序执行中输出信号
2.2.1 坐标系选择...................................................... 19
2.2.2 手动速度选择.................................................... 20