四轮转向
四轮转向车辆操纵稳定性仿真分析
宋凯凯▶◀……………………………………………………………………………四轮转向车辆操纵稳定性仿真分析前言随着科技的进步和汽车产业的发展,人们对于车辆操纵稳定性、舒适性和安全性的要求不断提高,四轮转向(Four-wheel steering ,4WS )作为一种有效改善车辆操纵性能的技术,吸引了国内外众多研究人员[1]。
使用4WS 技术的主要目的有:①减少车辆质心侧偏角β;②减少车辆横摆率与车辆横向加速度之间的相差;③增加轮胎横向力的裕度,使其远离饱和状态[2]。
运用4WS 技术可以有效地减小低速行驶时汽车的转弯半径,使汽车在低速时行驶更加灵活、便于泊车。
同时,4WS 技术还可以大大地改善汽等瞬态响应指标,提高高速行驶时的操纵稳定性和舒适性[7]。
Matlab 作为一种面向科学和工程计算的高级计算机语言,已成为国际科技界公认的最优秀应用软件[3]。
Simulink 是Matlab 提供的主要工具箱之一,用于可视化的动态系统建模、仿真和分析。
它采用系统模块直观地描述系统典型环节,因此十分方便地建立系统模型而不需要花较多时间编程。
并可以对系统作适当的实时修正或者按照仿真的最佳效果来调试及整定控制系统的参数,以提高系统的性能,减少设计系统过程中反复修改的时间,实现高效率地开发系统的目标[2]。
本文基于Matlab/simulink 对四轮转向车辆的控制系统进行了设计,并对4WS 车辆的操纵稳定性进行了仿真研究。
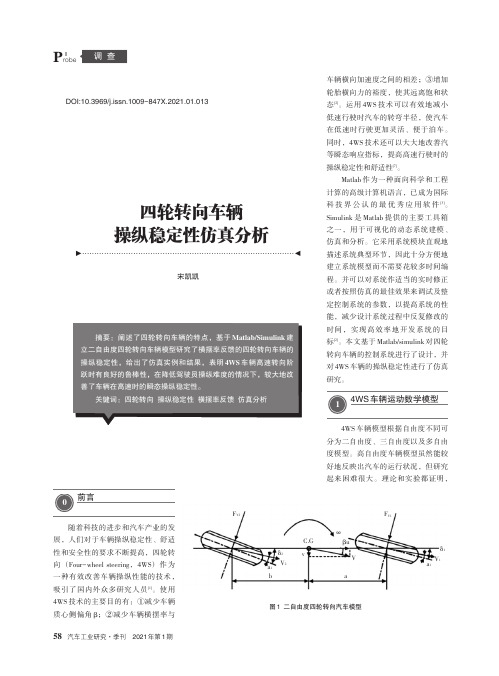
4WS 车辆运动数学模型4WS 车辆模型根据自由度不同可分为二自由度、三自由度以及多自由度模型。
高自由度车辆模型虽然能较好地反映出汽车的运行状况,但研究起来困难很大。
理论和实验都证明,F Y2F Y1δ2V 2a 1bavV C.Gβu ωV 1δ1a 1图1二自由度四轮转向汽车模型在正常车速的非紧急状态和小转向角情况下,包含横摆角速度和质心侧偏角的线性二自由度自行车模型能以较好的精度表征车辆转向的实际物理过程,基于它们设计的控制器能够正常工作[4][8][10]。
四轮转向1——【汽车精品讲义资料】
四轮转向系四轮转向系使汽车低速行驶转向并且转向盘转动角度很大时,后轮相对于前轮反向偏转,并且偏转角度随转向盘转角增大而在一定范围内增大。
如汽车急转弯、调头行驶、避障行驶或进出车库时,从而使汽车转向半径减小,转向机动性能提高。
汽车在高速行驶转向时,后轮应相对于前轮同向偏转,从而使汽车车身的横摆角度和横摆角速度大为减小,使汽车高速行驶时的操纵稳定性显著提高。
从后轮转向装置的控制方法上,四轮转向系可分为转角随动型四轮转向系和车速感应型四轮转向系。
转角随动型四轮转向系都是采用机械式的;而车速感应型四轮转向系有液压式、电子控制液压式和全电子控制式。
下面介绍不同类型的四轮转向系。
1一、机械式四轮转向系1.机械式四轮转向系统的组成如图11-39所示,机械式四轮转向系主要由转向盘、前轮转向器、后轮取力齿轮箱、后轮转向传动轴、后轮转向器等组成。
后轮转向也是绕转向节主销偏转的,其结构与前轮相似。
图11-39 机械式四轮转向系的组成1-后轮转向取力齿轮箱2-转向盘3-后轮转向传动轴4-后轮转向器2.后轮转向取力齿轮箱1) 结构后轮转向取力齿轮箱的结构如图11-40所示。
后轮转向取力齿轮箱中只有一对齿轮—齿条传动机构,其齿条与前轮转向器中的齿条共用,取力齿轮固定2在与后轮转向传动轴相连的齿轮轴上,齿轮轴通过衬套支撑在齿轮箱壳的轴承孔中,后轮转向取力齿轮箱固定在车架上。
图11-40 后轮转向取力齿轮箱1-小齿轮输出轴2-齿条2) 工作原理当转动转向盘使前轮转向时,后轮转向取力齿轮箱中的齿条在前轮转向器中转向齿条的带动下左、右移动,驱动与其啮合的取力齿轮旋转,并带动后轮转向传动轴旋转,转向盘的转向操纵力的方向、大小、快慢就由后轮转向传动轴传给后轮转向器。
3.后轮转向器31) 功用后轮转向器的功用是利用后轮转向传动轴传来的转向操纵力,驱动后轮偏转并实现后轮转向。
另外,还要控制后轮在转向盘的不同转角下,相对于前轮作同向或异向偏转。
基于lqr的四轮转向汽车控制方法

基于lqr的四轮转向汽车控制方法 一、啥是LQR呀? LQR呢,就是线性二次型调节器(Linear Quadratic Regulator)。这名字听起来就很“高大上”,但其实它就是一种很厉害的控制策略。就好像是汽车控制领域里的一个超级智慧小助手。在四轮转向汽车的控制里,它的作用可大了。简单来说,它能根据汽车的各种状态,像速度呀、转向角度呀之类的,算出一个最优的控制量,来让汽车的表现更好。比如说,让汽车转向更精准,行驶更稳定。这就好比是给汽车装上了一个超智能的导航仪,不过这个导航仪不是导路的,而是导汽车怎么更好地转向的。
二、四轮转向汽车为啥需要特殊控制呢? 我们平时看到的汽车大多是两轮转向的,四轮转向的汽车就比较特殊啦。四轮转向汽车的后轮也能转向呢,这就使得它的控制变得复杂起来。你想啊,四个轮子都要协调好转向,就像四个人一起跳舞,得有个好的指挥,不然就乱套了。如果控制不好,汽车可能就会出现转向过度或者转向不足的情况。转向过度就像是跳舞的人转得太猛,容易摔倒;转向不足呢,就像是想转个弯却转不过来,卡在那儿了。所以呀,就需要像LQR这样的控制方法来让四个轮子乖乖听话,协调一致地转向。
三、LQR在四轮转向汽车控制中的具体做法。 1. 建立汽车模型。 首先呢,要建立一个能准确描述四轮转向汽车动态特性的模型。这个模型就像是汽车的一个数字替身,要包含汽车的各种参数,比如车身的长度、宽度、重量,车轮的半径、轴距等等。只有这个模型建得准确了,LQR才能根据这个模型来进行有效的控制。这就好比是给LQR提供了一份汽车的详细“简历”,这样LQR才能知道它要控制的对象是什么样的。
2. 确定目标函数。 然后要确定一个目标函数。这个目标函数就像是LQR要追求的一个目标,比如说让汽车的侧偏角最小,或者让汽车的横向加速度波动最小之类的。这就像是给LQR定了一个任务,告诉它要朝着哪个方向去努力,让汽车的行驶状态达到最优。
四轮转向技术 4ws

LOREM IPSUM DOLOR
LO
LO
LO
ቤተ መጻሕፍቲ ባይዱ
LO
LO
LO
Lorem ipsum dolor sit amet, consectetur adipisicing elit, sed do eiusmod tempor incididunt ut labore et
dolore magna aliqua.
Content
1
四轮转向的作用
四轮转向的主要目的是提高汽 车在高速行驶或在侧向风力作 用时操纵稳定性 在汽车高速行驶时还易于由一 个车道向另外一个车道调整 改善在低速下的操纵轻便性, 亦即减少在停车场调车时的转 弯半径
(1)4WS车在高速行驶时的稳定性分析
4WS车高速行驶时,当受到侧向风或侧向路面干扰力时,车 身姿态变化小,便于修正方向盘
在高速行驶时,后轮与前轮同相位转向,且转角较小
从转向盘到后轮转向的时间很短,转弯时车身姿态变化小,即目
标行驶路线的跟踪行好
车身方向与实际行进方向没有很大的差别,在高速行驶时具
有稳定感
(2)4WS车在改变行车路线时的性能
后轮和前轮同一方向转动,在后轮也同样产生 侧向力,于是车身的侧偏角小,甚至可以为零 汽车可以平顺的换到行驶,从而提高了汽车的 操纵稳定性
LOREM IPSUM DOLOR
LO
LO
LO
LO
LO
Lorem ipsum dolor sit amet, consectetur adipisicing elit, sed do eiusmod tempor inci didunt ut labore et dolore magna aliqua. Ut enim ad minim veniam, quis nostrud exe rcitation ullamco laboris nisi ut aliquip ex ea commodo consequat.
四轮转向系统在日本汽车上的发展

。
,
而 后 轮 相 应ຫໍສະໝຸດ 的 最 大 转 向角 为。
,
但
前 轮同 向 转动 较 小 角度
当 低速 行 驶 时
,
而 在 某些 车种 中
,
后 轮 的 转 向却 与前轮 相 反
。
,
在 方 向盘 继 续 转 到 2 3 0 的 过 程 中 后 轮转 向 , 角 却 逐 渐 减 小而 达 到 零度 即 处于 直 线 行 驶 位置
。
,
以 减小 转 弯 半径
方 向 盘 继 续 旋 转 至 4 5 0 ( 此 时 前轮 转
,
“
本 田 公 司 的 四 轮 转 向系 统 (
4W ) S
是纯
向角 已 至 极 限 )
后 轮 则 通 过 零度 向 与 前 轮
.
机械 式 的 ( 图
1
)
。
装有 一套 由 液压 助 力 的 并 以 一根 通 过 车身 地 板
通 过 步 进 电动
漏覆囊薰于玩斋孽熬赢习
一一 百 ~
。
一
一 一一万
下
一
, 飞 灭一甲一
.
一
百一
-
一
。
图 3 电子 控 制一 液 压 操纵 的 马 自达 四 轮 转 向 系 统 ; ; : : : L 步 进 电 动机 2 控 制拨 叉 3 摆 臂 4 大 锥 齿 轮 5 控 制杆 6 控 制 阀 ; 8 前 轮 转 向角 输入 轴 9 液 压 缸
系统 的
.
器 一根 偏 心 轴 转 动 ( 图 2 )
轴 上 装有 一 个
。
行星齿 轮
与 固 定 的 内齿 圈 啮 合
, ,
四轮转向技术

现代汽车新技术——四轮转向技术(4WS)四轮转向技术(4WS)一、概述1、什么是4WS4 Wheel Steering 即除传统的前两轮转向外,后两轮也是转向轮。
提高高速行驶或侧向风作用下的操纵稳定性,改善低速行驶的操纵轻便性,减小转弯半径1980年代中期开始在轿车上应用2、四轮转向的几何运动关系2WS:后轮不转向,转向中心在后轴的延长线上4WS:后轮逆相转向,转中心比2WS车更靠近车辆,亦即转弯半径小四轮转向技术(4WS)u对于4WS 车,主要控制后轮的转向角u当后轮转向与前轮转向相同时称同相位转向u 当后轮转向与前轮转向相反时称逆相位转向3、后轮的两种转向方式四轮转向技术(4WS)u4、四轮转向的作用u四轮转向的主要目的是提高汽车在高速行驶或在侧向风力作用时的操纵稳定性u在汽车高速行驶时还易于由一个车道向另一个车道调整u改善在低速下的操纵轻便性,以及减小在停车场调车时的转弯半径u(1)4WS在高速行驶时的稳定性分析u4WS车高速行驶时,当受到侧向风或侧向路面干扰力时,车身姿态变化小,便于修正方向盘u在高速行驶时,后轮与前轮同相位转向,且转角较小u从转向盘到后轮转向的时间很短,转弯时车身姿态变化小,即目标行驶路线的跟踪性好u车身方向与实际行进方向没有很大差别,在高速行驶时具有稳定感u(2)4WS车在改变行车路线时的性能u后轮和前轮同一方向转动,在后轮也同样产生侧向力,于是车身的侧偏角小,甚至可以为零u汽车可以平顺地换道行使,从而提高了汽车的操纵稳定性u平动:纵向(surge)、横向(sway)、上下(heave)u转动:横摆(yaw)、侧倾(roll)、俯仰/点头(pitch)u在2WS车中,只有前轮转向,转角α,产生离心力,路面的侧向力(侧偏力)产生围绕重心的力矩u前轮转向初期,后轮直线行驶,无离心力,路面无侧向力u前轮路面的侧向力产生的围绕重心的力矩,使得车身围绕重心横向摆动(车身蛇形运动),操纵稳定性下降u理想的高速行驶转向,应该使车身方向与行进方向尽量一致,以抑制横向摆动u在4WS车中,前后轮同相转向,前后轮的同时产生离心力,路面的侧向力围绕重心的力矩互相平衡,抑制了横向摆动,保证了操纵稳定性四轮转向技术(4WS)(3)低速下的小转弯半径行驶当汽车在狭窄的停车场地转弯时,停车是否容易主要取决于转弯半径大小,4WS比2WS车转弯半径要小得多。
四轮转向汽车动力学建模

四轮转向汽车动力学建模四轮转向汽车是一种特别设计的轿车,通过其增加的后轮转向,可以改善车辆操控性,特别是在高速行驶时,更能帮助车辆在转弯时保持稳定性。
汽车动力学建模是关于汽车运动的物理学和工程学领域,由汽车设计师和工程师使用来处理汽车运行的一个重要方法。
下面,我们来了解一下建立四轮转向汽车动力学模型的步骤。
1.建立4-轮汽车运动学模型汽车运动学是描述汽车运动的物理学。
它包括位置、速度和加速度等向量对时间的变化规律的描述。
因此,在建立四轮转向汽车动力学模型之前,需要先建立汽车运动学模型。
首先,需要画出汽车运动的自由度图,通过这个图可以得到汽车的六个自由度。
然后依据相对位置和旋转角度,建立汽车的刚体模型。
在这个模型中,需要求出刚体的位移、速度和加速度。
2.建立4-轮汽车横向动力学模型建立四轮转向汽车的横向动力学模型非常重要。
这是因为在高速中行驶时,驾驶员需要处理车辆在转弯时的横向动力学问题。
而横向动力学模型可以通过使用线性轮胎模型描述汽车极限横向加速度的限制,来描述汽车在转弯时的动力学模型。
除了横向加速度,模型还包括横向质心位置,车辆横向速度以及所有轮的侧向力。
3.建立4-轮汽车纵向动力学模型汽车的纵向动力学是描述汽车在加速和制动时的物理学。
从这个角度,建立四轮转向汽车的纵向动力学模型可以处理车辆加速和制动时的动态行为。
模型包括刚体动力学和轮胎轴承特性,通过轮轴转矩和惯性力等描述汽车的动力学。
汽车纵向动力学采用的建模方法包括使用简单的百分比拟合动态性能测试数据,计算上升速度,牵引力和制动力等参数。
4.建立4-轮汽车转向动力学模型四轮转向汽车比普通汽车具有更好的转向性能。
其转向动力学是描述汽车在转向时的动态行为。
转向动力学模型主要包括前后悬架参数、车辆重量,以及转向时前后轮之间的差异。
这些参数一般可以通过车辆动态性能实验来获取。
模型中,各轮转角决定了转向动力学的结果,模型可以通过解方程组来描述轮胎侧向力和速度之间的关系。
汽车四轮转向

汽车四轮转向系统的研究与发展摘要:介绍四轮转向汽车的发展、构成、工作原理及类型,阐述四轮转向系统的控制策略和发展趋势,并指出四轮转向系统研究的技术难点。
关键词:四轮转向;结构;工作原理;控制;发展1、前言随着现代道路交通系统和先进汽车技术的发展,汽车的主动安全技术日益受到重视。
先进的主动底盘控制技术是汽车发展的重要方向,而四轮转向系统是主动底盘控制的重要组成部分。
汽车的四轮转向(Four -wheel Steering——4WS)是指汽车在转向时,后轮可相对于车身主动转向,使汽车的四个车轮都能起转向作用。
以改善汽车的转向机动性、操纵稳定性和行驶安全性。
2、汽车四轮转向技术概况从二十世纪初(1907年),日本政府颁发第一个关于四轮转向的专利证书开始,对于汽车四轮转向的研究一直伴随着汽车工业的发展而进行着。
二战期间,美国的一些军用车辆和工程车辆上采用一种前、后轮逆相位偏转的简单机械式4WS系统,以适应恶劣的路况,改善汽车低速转向时的机动性能。
1962年,在日本汽车工程协会的技术会议上,提出了后轮主动转向的4WS技术,开始了现代4WS转向系统的研究。
在70年代末,本田(Honda)和马自达(Mazda)积极投入4WS的开发。
1985年,日本的尼桑(Nissan)在客车上应用了世界上第一例实用的4WS系统,应用在一种车型上的高性能主动控制悬架(High Capacity Activety-Controlled Suspension――HICAS)上。
随着对4WS这一领域研究的不断进展,出现了多种不同结构型式、不同控制策略的实用4WS 系统。
一般来说,4WS汽车在转向过程中,根据不同的行驶条件,前、后轮转向角之间应遵循一定的规律。
目前,典型4WS汽车的后轮偏转规律是:(1)逆相位转向如图1(a)所示,在低速行驶或者方向盘转角较大时,前、后轮实现逆相位转向,即后轮的偏转方向与前轮的偏转方向相反,且偏转角度随方向盘转角增大而在一定范围内增大(后轮最大转向角一般为5°左右)。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
简析汽车四轮转向系统
摘要:本文介绍了汽车四轮转向系统(4WS )的分类,主要构造,工作原理,分析了它的工作特性并阐述了其转向角比例控制原理,还对四轮转向与前轮转向(2WS )进行了对比,分析了它的优点,并对它的未来发展做出了展望。
1 概述
目前的轿车转向分为前轮转向(2WS )和四轮转向(4WS ),前者普遍使用,而后者则是一种新技术,主要应用于中高级车上。
所谓四轮转向,是指后轮和前轮相似,也具有一定的转向功能,不仅可以与前轮同向旋转,也可以与前轮反向旋转。
其主要目的是增强汽车在高速行驶或侧向风力作用下的操纵稳定性,改善低速行驶时的操纵轻便性,便于汽车高速行驶时急转弯和由一个车道向另一个车道移动调整,减少调头时的转弯半径,以及在极狭窄的位置“平移”进入车位停泊。
四轮转向系统,对于底盘较长,且经常需要在窄小地方行驶时的汽车有着明显的作用。
按照前后轮的偏转角和车速之间的关系,4WS 可分为转角传感型和车速传感型;按照控制和驱动后轮转向机构的方式,可分为机械式、液压式、电控机械式、电控液压式和电控电动式等。
2 四轮转向的基本原理
2.1低速时的转向特征
2.1.1理论准备
缩小最小转弯半径当前轮与后轮逆向转向时,前轴距中心的轴线与后轴距中心的轴线交点为转向中心P 。
图1 4WS 的转向中心
P 点的坐标(0x ,0y )的计算公式为
r
f l
x δδtan tan 0+=
(2.1)
r
f l
l l y δδδtan tan tan 0+⋅⋅
= (2.2)
如果前外轮的转弯半径为R ,前后外侧车轮之间的转弯半径差值为R ∆,则
BP R =
222020)tan tan tan ()tan tan 2
(
)()2
(
r
f f r f f f l l
b y l x b δδδδδ+⋅+++
⋅-++= (2.3)
CP AP R -=∆
2
0202020)2
(
)()2
(y x b y l x b r f ++--++-
=
(2.4) 22)tan tan tan ()tan tan 2(r f f r f f
l l b δδδδδ+⋅+++-=22
)tan tan tan ()tan tan 2(r
f f r f r l l b δδδδδ+⋅+++--
式中f δ——前轮的偏转角(左、右两前轮偏转角的平均值); r δ——后轮的偏转角(左、右两前轮偏转角的平均值); f b ——前轮距; r b ——后轮距; l ——轴距。
f
f f l
PQ R δδδtan cos sin ++=
= (2.5)
PO PQ R -=∆
f f f l
δδδtan cos sin ++=r
r r l δδδtan cos sin ++- (2.6)
从式(2.5)中可以看出当后轮与前轮逆相位转向时,四轮转弯半径比两轮转弯半径小。
从式(2.6)中可以看出,当前、后轮偏转角相同时(f δ=r δ),前、后轮的转弯半径差值可能为0。
从下图可以直观看出转向半径的大小。
2.1.2 2WS 与4WS 的比较
图2 低速时2WS与4WS的比较
如上图所示为低速转向行驶轨迹,2WS汽车的情况是后轮不转向,所以转向中心大致在后轴的延长线上。
4WS汽车的情况是对后轮进行逆向操纵,转向中心比2WS汽车靠近车体处。
在低速转向时,若两前轮转角相同,则4WS汽车的转向半径更小,内轮差也小,转向性能好。
对于小轿车而言,如果后轮逆向转向5°,则可减少最小转弯半径50cm,内轮差约10cm。
2.2.中高速四轮转向特征
2.2.1 2WS转向特性
直线行驶的汽车转向是下面两种
运动的合成运动:汽车质心绕转向中
心的公转和汽车绕质心的自转。
如左
图2WS汽车中高速时车辆的运动状态:
前轮转向时,前轮产生侧偏角α,并
产生旋转向心力使车体开始自转,此
时后轮产生侧偏角β和旋转向心力,车
速越高,离心力越大,所以必须给前
轮更大的侧偏角,使它产生更大的旋
转向心力,与此同时,后轮也产生与
此相应的侧偏角,车体本身自转趋势
更加严重。
也就是说,车速越高,转
向时容易引起车辆的旋转和侧滑。
图3 2WS汽车中高速转向示意图
2.2.2 4WS转向特性与2WS的比较
理想的高速转向运动
状态是尽可能使车体的倾
向和前进方向一致,从而使
后轮产生足够的旋转向心
力。
在4WS汽车通过对后轮
同向转向操控,使后轮也产
生侧偏角,使它与前轮的旋
转向心力相平衡,从而抑制
自转运动,得到车体方向和
车辆前进方向一致的稳定
转向状态。
图4 2WS和4WS汽车中高速转向比较图
3 四轮转向的实现途径
3.1 系统组成
如下图所示为4WS转向比例控制的系统图。
前后的转向机构是机械式的连接方式,转向盘的转动通过前转向齿轮箱(齿轮齿条式)中的齿条带动转向横拉杆左右移动,使前轮产生转向,同时小齿轮的旋转输出通过连接轴由输入小齿轮传给后转向齿轮箱,经过转向枢轴和4WS转换器实现后轮转向。
图5 4WS汽车转向角比例控制系统
3.1.1转向枢轴
如下图(a)所示,后转向齿轮箱的转向枢轴是一个大轴承,其外圈与扇形齿轮为一体,围绕枢轴可左右转动;其内圈与连杆突出的偏心轴相连,连杆通过4WS转换器的电机连杆绕旋转中心作正反旋转。
偏心轴可在转向枢轴机构内上下回转55°。
图6 转向枢轴示意图
通过连接轴的输入使小齿轮向左或向右旋转时,旋转力传递到扇形齿轮,再由转向枢轴通过偏心轴使连杆左右移动。
连杆带动后转向横拉杆和后转向节臂实现后轮转向。
如上图(b)所示为由于枢轴和偏心轴的运动,形成后轮的同相位和逆相位的转向原理。
偏心轴的前端与枢轴左右转动,连杆也完全不动,后轮处于中立状态。
随着偏心轴前端位置与枢轴旋转中心上、下方向的偏离,枢轴左右转动时连杆的移动量变大。
偏置轴与后轮转向之间的动态关系是偏心轴前端位置在转向枢轴的上侧时为逆相位,下侧时为同相位。
图(c)所示为转向枢轴旋转角度与连杆旋转角度和左右移动量的关系。
3.1.2转换器
4WS转换器主要由电动机、副电动机的驱动部分、行星齿轮的减速部分和旋转连杆的蜗杆组成。
通常主电动机转动,副电动机处于停滞状态。
副电动机的输出轴与行星齿轮的中心齿轮相连,齿圈就是4WS转换器的输出轴。
通常中心齿轮固定不动,而与主电动机相连的小齿轮旋转。
小齿轮围绕中心轮自传和公转,以此带动4WS转换器的输出齿圈。
3.2 四轮转向的控制方法
图7 后轮转向操纵机构
机械式转向操纵机构的情况是通过缆绳将转动传递到后带轮并带动控制凸轮,而凸轮推杆仿照凸轮外形运动带动阀套筒左右移动。
转向盘向左转动时,后带轮做向右旋转。
随着旋转,凸轮曲率半径变小,凸轮推杆被拉出,阀套筒就向左移动。
转向盘右移时则相反。
随着凸轮曲率半径增大,凸轮推杆被推进,阀套筒就向右移动。
由于阀套筒和阀新的相对位移,使来自液压泵的工作压力油路被切换,转向盘向左转动时,阀套筒就向左移动,使油液进入液压缸的右室,动力活塞向左移,此时与活塞一体的拉杆向左移,将后轮向右转。
3.2.1大转向角控制
当前轮向左转向时,阀套筒向左方向移动,并与阀心之间产生相对位移。
如图所示a和b部位被节流,高压作用于动力油缸的右室,推动活塞杆向左移动,而后轮就向右转向。
当活塞杆向左移动时,因为脉冲电机不工作,控制阀杆就以支点A为中心回转并将阀心从B点移到左方的B’点。
因此,打开处于节流状态的阀a部分以及b部分,降低动力油缸右室的压力,结果是当活塞杆移动到规定位置时,a部分以及b部分的节流压力与来自车轮的外力相平衡,后轮就不能进行更多的转向。
3.2.2小转向角控制
采用螺旋齿轮和曲柄组合结构将脉冲电动机的旋转运动变为阀芯的直线运动。
当从动齿轮向左旋转时,阀控制杆的上端支点A就以从动齿轮中心O为回转中心移到A’。
脉冲电机刚启动瞬间,后转向轴还没有运动,所以阀控制杆就以C 点为回转中心向左运动,杆中央的B点成为B’点,使阀芯向左移动。
缆绳不动时,阀套筒固定不动,与阀套筒产生相对位移,阀的a部分以及b部分被节流,高压油进入油缸左室。
4 四轮转向技术展望
在一般行驶工况下,4WS系统能够在很大范围内有效地提高汽车的动力学响应特性,在极限工况下,它更能很好地保持汽车的操纵稳定性。
不久的将来,4WS 技术将随着进一步发展而得到长足的进步,并在车辆系统中得到更广泛的应用,尤其是在提高车辆的中高速的操纵稳定性方面会得到广泛的应用。