A Switching Piecewise-Linear Control Approach for Generating of
超导磁体电源
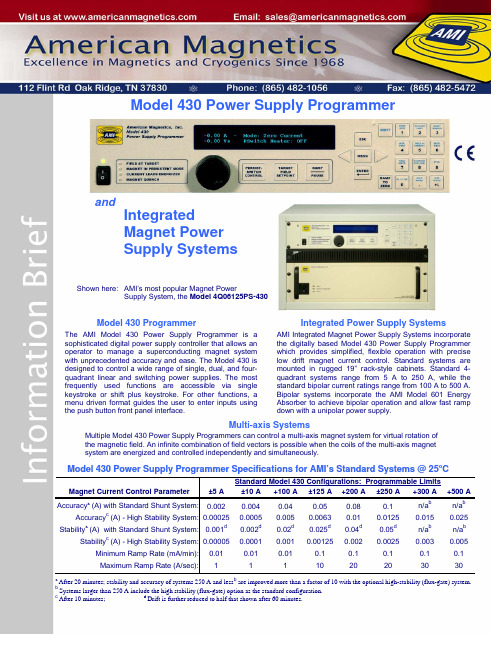
M o d e l 430 P o w e r S u p p l y P r o g r a m m e r S p e c i f i c a t i o n s f o r A M I ’s S t a n d a r d S y s t e m s @ 25o CStandard Model 430 Configurations: Programmable LimitsMagnet Current Control Parameter±5 A±10 A +100 A ±125 A +200 A ±250 A +300 A +500 AAccuracy a (A) with Standard Shunt System: 0.002 0.004 0.04 0.05 0.08 0.1 n/a bn/a bAccuracy c(A) - High Stability System: 0.000250.0005 0.005 0.0063 0.01 0.0125 0.015 0.025Stability a(A) with Standard Shunt System: 0.001d0.002d0.02d0.025d0.04d0.05dn/a bn/a bStability c(A) - High Stability System: 0.000050.0001 0.001 0.001250.002 0.0025 0.003 0.005 Minimum Ramp Rate (mA/min): 0.01 0.01 0.01 0.1 0.1 0.1 0.1 0.1 Maximum Ramp Rate (A/sec):1111020203030aAfter 20 minutes; stability and accuracy of systems 250 A and less bare improved more than a factor of 10 with the optional high-stability (flux-gate) system.bSystems larger than 250 A include the high stability (flux-gate) option as the standard configuration. c After 10 minutes; d Drift is further reduced to half that shown after 60 minutes.Model 430 Power Supply ProgrammerandIntegrated Magnet Power Supply SystemsShown here: AMI’s most popular Magnet Power Supply System, the Model 4Q06125PS-430Model 430 ProgrammerIntegrated Power Supply SystemsThe AMI Model 430 Power Supply Programmer is a sophisticated digital power supply controller that allows an operator to manage a superconducting magnet system with unprecedented accuracy and ease. The Model 430 is designed to control a wide range of single, dual, and four-quadrant linear and switching power supplies. The most frequently used functions are accessible via single keystroke or shift plus keystroke. For other functions, a menu driven format guides the user to enter inputs using the push button front panel interface.AMI Integrated Magnet Power Supply Systems incorporate the digitally based Model 430 Power Supply Programmer which provides simplified, flexible operation with precise low drift magnet current control. Standard systems are mounted in rugged 19” rack-style cabinets. Standard 4-quadrant systems range from 5 A to 250 A, while the standard bipolar current ratings range from 100 A to 500 A. Bipolar systems incorporate the AMI Model 601 Energy Absorber to achieve bipolar operation and allow fast ramp down with a unipolar power supply.Multi-axis SystemsMultiple Model 430 Power Supply Programmers can control a multi-axis magnet system for virtual rotation of the magnetic field. An infinite combination of field vectors is possible when the coils of the multi-axis magnet system are energized and controlled independently and simultaneously.Model 430 Features•Parameter for setting persistent switch cool time1•Ultrahigh resolution and accuracy•Intuitive user operation and comprehensive manual2•Upper current limit and voltage limit settings•Easy to read digital V m/V s (magnet and supply voltage) display meter•Can automatically determine inductance of load•Drivers for LabView•User-adjustable threshold quench detection with detection I/O••Galvanically isolated Program Output signal to prevent ground loops•Multifunction vacuum fluorescent display (VFD)•Menu driven user interface and keypad – logical and intuitive•One touch Ramp/Pause button•Digital readout in Field (kilogauss or Tesla) or Current (Amperes)•Control multiple parallel or series configured supplies•Front panel indication that current is flowing in magnet leads•Velocity sensitive encoder dial for fine adjustments•Programmable piecewise-continuous ramping with 10 current-dependent rates•I ntegrated DB-25 magnetstation connector with wiredDB-25 output signals availablefor other system devices•Built-in Ethernet and RS-2323 communication interfaces•Ethernet port allows access to the Programmer across a local network or via the Internet•Operating software is stored in flash memory and can easily be updated via the Ethernet or RS-232 ports1Important for conduction-cooled magnets (dry switch) when a relatively long time is required to cool as compared with wet switches.2Manual is conveniently available in the Model 430 firmware (pdf format) - just access the instrument’s IP address via a web browser.3An optional external conversion unit is available for interfacing the RS-232 serial port to a GPIB bus.Simplified OperationMost frequently used functions are accessible via single keystroke or shift plus keystroke. The front panel velocity-accelerated rotary encoder dial also allows the operator to make fine adjustments to operating parameters of the magnet system. Magnet system signal wiring, such as magnet voltage/current, helium levels, and temperatures, connect to the rear panel through a single DB-25 connector. Multiple connectors on the rear panel allow the user to route the signals to the appropriate instruments at the control station; the need for complicated wiring between the cryostat and magnet control station is thus eliminated.Digital ControlThe digitally-based Model 430 incorporates very high resolution analog <> digital converters and digital signal processing (DSP) to achieve excellent stability, precise control, and superior current resolution of the programmed magnetic field. An internal microcomputer manages all computations, analog data conversion, display/keypad functions, communications I/O, and analog power supply programming signals.High Resolution and StabilityPrecision instrumentation techniques and potentiometer-free designs are employed throughout the instrument to ensure accurate signal translation for a wide range of conditions. The magnet current is sampled at a resolution of 15.6 µA (for a 125 A supply) and is front-panel programmable in 0.1 mA increments. A further order of magnitude in accuracy and stability can be achieved by choosing the optional fluxgate based current measurement system in place of the standard resistive shunt.Magnet Control and ProtectionThe Model 430 protects the magnet from runaway supply voltage/current or operator error. The quench detect function, with user-adjustable quench sensitivity, is designed to detect a magnet quench and quickly stop power from being delivered to the resistive magnet. The system can optionally incorporate an AMI Liquid Helium (LHe) Level Instrument to prevent magnet quenching due to low LHe level; automatic ramp down of the magnet (even in persistent mode) is initiated if the LHe level drops to a preset level.A system administrator can program the instrument (from the front panel or remotely) with password protected operational limits or any other parameter(s) which can thereafter not be exceeded or changed without the password. During operation of the system, if the operator inadvertently attempts to take the magnet system to an excessive magnetic field strength or excessive voltage, the Programmer will not accept the parameter and will alert the operator that the value exceed the limits.The Model 430 automatically determines and sets the proper persistent switch heater current (range: 0 to 100 mA; compliance 13.5 V). The persistent switch heater circuit is continually monitored and the user is notified of circuit problems. The Model 430 Programmer automatically controls the power supply and persistent switch heater to aid the user in safe and quick transitions in and out of persistent mode.For single quadrant operation (I+, V+) the Model 430Programmer can control various unipolar switching or linearsupplies. Shown here is the AMI Model 08150PS-430 1200 wattswitching supply combination. This system offers great value,small size, and minimum heat generation. The Model 430Programmer has also been tested on older supplies such as theHP6260B linear power supply; it can breathe new life into yoursystem by offering state of the art control capability.Bipolar operation (I+, V-/+) is obtained by adding a Model 601Energy Absorber unit to take full advantage of programmedmagnetic field profiles, and other situations requiring fast rampdown rates.AMI’s lowest-power standard bipolar power supply system, designated 05100PS-430-601, has the Model 08150PS configured at 100 A/ 10 V, and in conjunction with the Model 601, supplies 100 A at 5 V to the load. The system comes mounted in a 19” rack style cabinet. Specifications for this and other standard AMI bipolar systems are outlined below. AMI’s highest-power standard bipolar power supply system, the Model 05500PS-430-601, is pictured on the last page of this brochure. Other ratings and configurations are available.Specifications – Standard Cabinet Mounted Bipolar Power Supply Systems SystemMaximumCurrentMaximumVoltageOutputPowerMaximumInput Power aTypicalNoiseDimensions bh x w x dApproximateWeight c 05100PS-430-601: +100 A ±5 Vdc 500 VA 1500 VA 75 mV p-p 12.5" x 21.0" x 24.5" 70 lb (32 kg)05200PS-430-601: +200 A ±5 Vdc 1000 VA 3000 VA 75 mV p-p 25.0" x 23.6" x 23.6" 165 lb (75 kg) 05300PS-430-601: +300 A ±5 Vdc 1500 VA 4500 VA 75 mV p-p 30.3" x 23.6" x 23.6" 215 lb (98 kg) 05500PS-430-601: +500 A ±5 Vdc 2500 VA 7250 VA 75 mV p-p 47.2" x 21.3" x 24.5" 330 lb (150 kg)a Includes Model 430 and Model 601 bRack/cabinet dimensions; h = height; w = width; d = depth c Includes rack/cabinetFor true high-current four-quadrant operation (I+/-, V+/-) the Model430 is configured with the Model 4Q06125PS Power Supply toprovide smooth, linear sweeps through zero current with constantramp rates across the entire operating range. The magnet systemcan easily be fine tuned by making precise adjustments to the currentthrough the use of the convenient velocity sensitive encoder dial. Thissystem, designated 4Q06125PS-430, comes standard in a 19” rackstyle cabinet, and is depicted on the cover page of this brochure.For higher voltage or current, series and parallel configurations of the4Q06125PS are available (designated 4Q12125PS-430 and4Q06250PS-430). For smaller magnets, four quadrant power supplysystems (designated 4Q1005PS-430 and 4Q1010PS-430)incorporate the smaller Kepco BOP supplies and are offered forsmaller magnet requirements. Specifications for standard AMI fourquadrant systems are outlined below.Other ratings and configurations are available.Specifications – Standard Cabinet Mounted Four Quadrant Power Supply Systems SystemMaximumCurrentMaximumVoltageOutputPowerMaximumInput Power aTypicalNoiseDimensions bh x w x dApproximateWeight c 4Q06125PS-430: ±125 A ±6 Vdc 750 VA 2000 VA 120 mV p-p 12.5" x 21.0" x 24.5" 100 lb (46 kg)4Q06250PS-430: ±250 A ±6 Vdc 1500 VA3800 VA 120 mV p-p 19.5" x 21.0" x 24.5" 200 lb (91 kg)4Q12125PS-430: ±125 A ±12 Vdc 1500 VA3800 VA 240 mV p-p 19.5" x 21.0" x 24.5" 200 lb (91 kg)4Q1005PS-430: ±5 A ±10 Vdc 50 VA 700 VA 10 mV p-p 12.5" x 21.0" x 24.5" 85 lb (39 kg)4Q1010PS-430: ±10 A ±10 Vdc 100 VA 1200 VA 10 mV p-p 12.5" x 21.0" x 24.5" 85 lb (39 kg)a Includes Model 430 bRack/cabinet dimensions; h = height; w = width; d = depth c Includes rack/cabinetThe Internet Protocol Model 430IP Power Supply ProgrammerWith no front panel controls except the power On/Off switch, the Model 430IP is designed for fully functional magnet system control via the rear panel Ethernet connection using TCP/IP with a web browser.Control can be established through a locally connected computer or remotely through a network or even the Internet; the human/machine interface is a web browser depiction of the Model 430. This is especially useful for multi-axis systems where a computer is an inherent part of the system. The IP-capable firmware can also be applied to the standard Model 430 with front panel controls – in this case the computer-displayed Model 430 mirrors and controls all hardware front panel devices with theexception of the ac input power switch. The following is a screen-shot of the Model 430IP being controlled with a web browser.Selecting an AMI Power Supply SystemModel 05500PS-430-601 SystemBipolar (Magnet Voltage -5 V 1to +5 V)05500PS-430-60105300PS-430-60105200PS-430-60105100PS-430-6010 A 100 A 200 A 300 A 400 A 500 A1Available for fast discharge of magnet.Four Quadrant High Current (Magnet Voltage -6 V to +6 V)4Q06250PS-4304Q06125PS-430-300 A -200 A-100 A 0 A 100 A 200 A 300 AFour Quadrant High Current (Magnet Voltage -12 V to +12 V)4Q12125PS-430 4Q12125PS-430-200 A -100 A 0 A 100 A 200 AFour Quadrant Low Current (Magnet Voltage -10 V to +10 V)4Q1010PS-430 4Q06125PS4Q1005PS-430-10 A -5 A 0 A 5 A 10 A。
光机电一体化毕业设计翻译题
毕业设计翻译Mechatronic Design 机电一体化设计2.0 Approach 商量2.1 Historical Development and Definition of Mechatronic Systems历史发展和认识机电一体化系统2.2 Functions of Mechatronic Systems Division of Functions Between Mechanicsand Electronics Improvement of Operating Properties •Addition of NewFunctions功能的机电一体化系统之间的功能划分力学和电子改善操作性能•添加新的功能2.3 Ways of Integration Integration of Components (Hardware) •Integration ofInformation Processing (Software)集成方法集成元件(硬件)•一体化的信息处理(软件)2.4 Information Processing Systems (Basic Architecture and HW/SWTrade-offs) Multilevel Control Architecture • Special SignalProcessing • Model-based and Adaptive Control Systems •Supervision and Fault Detection • Intelligent Systems (Basic Tasks)信息处理系统(基本架构和硬件/软件权衡)多级控制结构•专用信号处理•模型和自适应控制系统•监督和故障检测•智能系统(基本任务).2.5 Concurrent Design Procedure for Mechatronic Systems Design Steps •Required CAD/CAE Tools •Modeling Rolf IsermannProcedure • Real-Time S imulation • Hardware-in-the-LoopDarmstadt University of Technology Simulation • Control Prototyping2.1 Historical Development and Definition of Mechatronic Systems历史发展和认识机电一体化系统is especially true for mechanical systems which developed since about 1980. These systems changed fromelectro-mechanical systems with discrete electrical and mechanical parts to integrated electronic-mechanicalsystems with sensors, actuators, and digital microelectronics. These integrated systems, as seen in Table 2.1,are called mechatronic systems, with the connection of MECHAnics and elecTRONICS.在一些技术领域的一体化产品或工艺和电子可以观察。
外文资料翻译
外文资料翻译学生姓名:崔华星专业班级: 07级机制04班指导教师:杨庆山河北工程大学机电学院年月Reduction of noise of loaded and unloaded misaligned gear drives AbstractTransmission errors are considered as the main source of vibration and noise of gear drives. The impact of two main functions of transmission errors on noise is investigated: (i) a linear one, caused by errors of alignment, and (ii) a predesigned parabolic function of transmission errors, applied for reduction of noise. It is shown that a linear function of transmission errors is accompanied with edge contact, and then inside the cycle of meshing, the meshing becomes a mixed one: (i) as surface-to-surface tangency, and (ii) surface-to-curve meshing when edge contact starts. Application of a predesigned parabolic function of transmission errors enables to absorb the linear functions of transmission errors caused by errors of alignment, reduce noise, and avoid edge contact. The influence of the load on the function of transmission errors is investigated. Elastic deformations of teeth enable to reduce the maximal transmission errors in loaded gear drives. Computerized simulation of meshing and contact is developed for loaded and unloaded gear drives. Numerical examples for illustration of the developed theory are provided.Keywords: Gear drives; Transmission errors; Tooth contact analysis (TCA); Finite element analysis; Reduction of noiseArticle Outline1. Introduction2. Modification of tooth surfaces2.1. Helical gear drives2.2. Spiral bevel gears2.3. Worm gear drives with cylindrical worm3. Types of meshing and basic functions of transmission errors4. Transmission errors of a loaded gear drive4.1. Preliminary considerations4.2. Application of finite element analysis for determination of function of transmission errors of a loaded gear drive5. Numerical examples6. Comparison of the power of noise for two functions of transmission errors6.1. Conceptual consideration of applied approach6.2. Interpolation by a piecewise linear function7. ConclusionAcknowledgementsReferences1. IntroductionSimulation of meshing of gear drives performed by application of tooth contact analysis (TCA) and test of gear drives have confirmed that transmission errors are the main source of vibrations of the gear box and such vibrations cause the noise of gear drive [1], [2], [4], [5], [6], [7], [10] and [11]. The shape of functions of transmission errors depends on the type of errors of alignment and on the way of modification of gear tooth surfaces performed for improvement of the drive (see Section 2).The reduction of noise proposed by the authors is achieved as follows:(1) The bearing contact of tooth surfaces is localized.(2) A parabolic function of transmission errors is provided. This allows to absorb linear functions of transmission errors caused by misalignment [7].(3) One of the pair of mating surfaces is modified by double-crowning (see Section 2). This allows usually to avoid edge contact (see Section 5).The authors have compared the results of application of TCA for loaded and unloaded gear drives. It is shown that transmission errors of a loaded gear drive are reduced. The developed approach is illustrated with numerical examples (see Section 5).2. Modification of tooth surfacesReduction of noise of a gear drive requires modification of one of the pair of contacting surfaces. The surface modification is illustrated for three types of gear drives: helical gears, spiral bevel gears, and worm gear drives.2.1. Helical gear drivesProfile crowning of helical gears may be illustrated considering that the mating surfaces are generated by two rack-cutters with mismatched profiles [5] and [7].Profile crowning allows to localize the bearing contact. Double-crowning in comparison with profile crowning allows to: (i) avoid edge contact (caused by errors of crossing angle and different helix angles of mating gears), and (ii) provide a parabolic function of transmission errors.Double-crowning is performed by plunging of the disk that generates the pinion (see details in Chapter 15 of Ref. [7]).2.2. Spiral bevel gearsLocalization of contact of generated spiral bevel gears is provided by application of two mismatched head-cutters Σp and Σg used for generation of the pinion and the gear, respectively [7]. Two head-cutters Σp and Σg have a common line C of generating tooth surfaces (in the case when profile crowning is provided). In the case of double-crowning, the mismatched generating surfaces Σp and Σg of the head-cutters have only a common single point of tangency, but not a line of tangency.Double-crowning of a generated gear may be achieved by tilting of one of the pair of generating head-cutters, or by proper installment of one of the head-cutters. It is very popular for the modern technology that during the generation of one of the mating gears, usually of the pinion, modified roll is provided [7].2.3. Worm gear drives with cylindrical wormVery often the technology of manufacturing of a worm-gear is based on the following approach. The generation of the worm-gear is performed by a hob that is identical to the worm of the gear drive. The applied machine-tool settings simulate the meshing of the worm and worm-gear of the drive. However, manufacture with observation of these conditions causes an unfavorable bearing contact, and high level of transmission errors. Minimization of such disadvantages may be achieved by various ways:(i) by long-time lapping of the produced gear drive in the box of the drive;(ii) by running of the gear drive under gradually increased load, up to the maximal load;(iii) by shaving of the worm-gear in the box of the drive by using a shaver with minimized deviations of the worm-member, etc.The authors’ approach is based on localization of bearing contact by application of: (a) an oversized hob, and (b) modification of geometry (see below).There are various types of geometry of worm gear drives [7], but the preferable one is the drive with Klingelnberg’s type of worm. Such a worm is generated by a disk with profiles of a circular cone [7]. The relative motion of the worm with respect to the generating disk is a screw one (in the process of generation).Very often localization of bearing contact in a worm gear drive is achieved by application of a hob that is oversized in comparison with the worm of the drive.3. Types of meshing and basic functions of transmission errorsIt is assumed that the tooth surfaces are at any instant in point tangency due to the localization of contact. Henceforth, we will consider two types of meshing: (i) surface-to-surface, and (ii) surface-to-curve. Surface-to-surface tangency is provided by the observation of equality of position vectors and surface unit normals [7]. Surface-to-curve meshing is the result of existence of edge contact [7].The algorithm of TCA for surface-to-surface tangency is based on the following vector equations [7]:(1)(2)that represent in fixed coordinate system Sf position vectors andsurface unit normals . Here, (ui, θi) are the surface parameters and (1, 2) determine the angular positions of surfaces.The algorithm for surface-to-curve tangency is represented in Sf by equations [7](3)(4)Here, represents the surface that is in mesh with curve is the tangent to the curve of the edge.Application of TCA allows to discover both types of meshing,surface-to-surface and surface-to-curve. Computerized simulation of meshing is an iterative process based on numerical solution of nonlinear equations [8].By applying double-crowning to one of the mating surfaces, it becomes possible to: (i) avoid edge contact, and (ii) obtain a predesigned parabolic function [7] (Fig. 1). Application of a predesigned parabolic function is the precondition of reduction of noise.Fig. 1. Illustration of: (a) transmission functions 1 of a misaligned gear drive and linear function 2 of an ideal gear drive without misalignment;(b) periodic functions Δ2(1) of transmission errors formed byparabolas.Application of double-crowning allows to assign ahead that function of transmission errors is a parabolic one, and allows to assign as well the maximal value of transmission errors as of 6–8″. The expected magnitude of the predesign parabolic function of transmission errors and the magnitude of the parabolic plunge of the generating tool have to be correlated. Fig. 2 shows the case wherein due to a large magnitude of error of misalignment, the function of transmission errors is formed by twobranches: of surface-to-surface contact and ofsurface-to-curve contact.Fig. 2. Results of TCA of a case of double-crowned helical gear drive with a large error Δγ = 10′: (a) function of transmission errors whereincorresponds to surface-to-surface tangency and correspond tosurface-to-curve tangency; (b) path of contact on pinion tooth surface;(c) path of contact on gear tooth surface.4. Transmission errors of a loaded gear driveThe contents of this section cover the procedure of determination of transmission errors of a loaded gear drive by application of a general purpose FEM computer program [3]. Transmission errors of an unloaded gear drive are directly determined by application of TCA. Comparison of transmission errors for unloaded and loaded gear drives is represented in Section 5.4.1. Preliminary considerations(i) Due to the effect of loading of the gear drive, the maximal transmission errors are reduced and the contact ratio is increased(ii) The authors’ approach allows to reduce the time of preparation of the model by the automatic generation of the finite element model [1] for each configuration of the set of applied configurations.(iii) Fig. 3 illustrates a configuration that is investigated under the load. TCA allows to determine point M of tangency of tooth surfaces Σ1 and Σ2, before the load will be applied (Fig. 3(a)), where N2 and N1 are the surface normals (Fig. 3(b) and (c)). The elastic deformations of tooth surfaces of the pinion and the gear are obtained as the result of applying the torque to the gear. The illustrations of Fig. 3(b) and (c) are based on discrete presentations of the contacting surfaces.Fig. 3. Illustration of: (a) a single configuration; (b) and (c) discrete presentations of contacting surfaces and surface normals N1 and N2.Fig. 4 shows schematically the set of configurations in 2D space. The location of each configuration (before the elastic deformation will beapplied) is determined by TCA.Fig. 4. Illustration of set of models for simulation of meshing of a loaded gear drive.4.2. Application of finite element analysis for determination of function of transmission errors of a loaded gear driveThe described procedure is applicable for any type of a gear drive. The following is the description of the required steps:(i) The machine-tool settings applied for generation are known ahead, and then the pinion and gear tooth surfaces (including the fillet) may be determined analytically.(ii) Related angular positions are determined by(a) applying of TCA for Nf configurations (Nf = 8–16), and (b) observing the relation(5)(iii) A preprocessor is applied for generation of Nf models with the conditions: (a) the pinion is fully constrained to position , and (b)the gear has a rigid surface that can rotate about the gear’s axis (Fig.5). Prescribed torque is applied to this surface.(vi) The total function of transmission errors for a loaded gear driveis obtained considering: (i) the error caused due to the mismatched of generating surfaces, and (ii) the elastic approach .(6)5.Numerical examplesA helical gear drive with design parameters given in Table 1 is designed. The following conditions of meshing and contact of the drive are considered:(1) The gear and pinion rack-cutters are provided with a straight-line and parabolic profiles as cross-section profiles, respectively, for generation of the gear and the pinion. Mismatched rack-cutter profiles yield the so-called profile crowning.(2) The misalignment of gear drive is caused by an error of the shaft angle, Δγ≠ 0.(3) A predesigned parabolic function for absorption of transmission errors caused by Δγ≠ 0 is provided. (Such a function for a double-crowned pinion tooth surface is obtained by plunging of the generating disk, or by modified roll of the grinding worm.)(4) TCA (tooth contact analysis) for unloaded and loaded gear drives are applied for determination of transmission errors caused by Δγ. This enables to investigate the influence of the load on the magnitude and shape of the function of transmission errors.(5) Application of a computer program for finite element analysis [3] enables to determine the stresses of a loaded gear drive.(6) Formation of bearing contact is investigated.Table 1.Design parametersNumber of teeth of the pinion, N1 21Number of teeth of the gear, N2 77Normal module, mn 5.08 mmNormal pressure angle, αn 25°Hand of helix of the pinion Left-handHelix angle, β30°Face width, b 70 mmParabolic coefficient of pinion rack-cutter, aca 0.002 mm−1 Radius of the worm pitch cylinder, rwa 98 mmParabolic coefficient of pinion modified roll, amrb 0.00008 rad/mm2 Applied torque to the pinionc 250 N m(i) Example 1: An aligned gear drive (Δγ = 0) is considered. The geardrive is unloaded. A parabolic function with the maximal value of transmission errors Δ2(1) = 8″ is provided (Fig. 6(a)). The cycle ofmeshing is . The bearing contact on the pinion and gear tooth surfacesis oriented almost longitudinally (Fig. 6(b) and (c)).Fig. 6. Results of computation for an unloaded gear drive without misalignment: (a) function of transmission errors; (b) and (c) paths of contact on pinion and gear tooth surfaces.6. Comparison of the power of noise for two functions of transmission errors6.1. Conceptual consideration of applied approachDetermination of the power of the signal of noise is based on the assumption that the velocity of oscillation of the generated acoustic waves is proportional to the fluctuation of the instantaneous value of the velocity of the gears. This assumption (even if not accurate in general) is good as the first guess, since it allows to avoid application of a complex dynamic model of the gear drive.We emphasize that the proposed approach is applied for the following conditions:(a) The goal is the determination of difference of power of signals, but not the determination of absolute values of signals.(b) The difference of power of signals is the result mainly of the difference of first derivatives of two smooth functions of transmission errors.The proposed approach is based on the comparison of the root mean square of the signals (in rms) caused by two functions of transmission errors[9]. Such comparison yields the simulation of the intensity (the power) of the signal defined as(7)Here ω2(1)′ represents the d eviation of the angular velocity of the gear from the average value, and ωrms represents the desired rms value. The definition of function of transmission errors yields that 2 = m211 + Δ2(1), where m21 is the gear ratio. By differentiation with respectto time, we obtain the angular velocity of the gear as(8)wherein is assumed as constant. The second term on the right side of Eq. (8) represents the sought-for fluctuation of velocity(9)The definition above assumes that the function of transmission errors (FTE) is a continuous and differentiable one. In the case of computation of a loaded gear drive simulated by FEM (finite element method), this function is defined by a finite number of given points ((1)i, (Δ2)i)(i = 1, … , n). The given data of points have to be interpolated by continuous functions for application of Eq. (7).)6.2. Interpolation by a piecewise linear functionIn this case (Fig. 7), two successive data points are connected by a straight line. The derivative (velocity) between point i and i − 1 is constant and is determined as follows:(10)Fig. 7. Interpolation of function of transmission errors by application of a piecewise linear function.Data points have been chosen as follows: (i) an increment (1)i − (1)i−1 is considered as constant for each interval i, and (ii) as the same for the two functions (FTE) represented in Examples 2 and 3 (in Section 5). Based on this assumption, the ratio of two magnitudes of power by application of the mentioned functions is represented as(11)7. ConclusionThe previously presented discussions, computations, and numerical examples enable to draw the following conclusions:(1) Errors of alignment of a gear drive (if modification of surfaces is not provided enough) may cause a mixed meshing: (i) surface-to-surface and (ii) edge contact (as surface-to-curve). Edge contact may be usually avoided by application of a predesigned parabolic function (PPF).(2) The investigation of influence of a parabolic function of transmission errors shows that application of PPF enables to reduce the noise and vibration of the gear drive. Application of PPF requires modification of generation of at least of one member of the gear drive, usually of the pinion (or the worm, in case of a worm gear drive).(3) Determination of transmission errors of a loaded gear drive requires application of a general purpose finite element computer program. A loaded gear drive is accompanied with elastic deformation of teeth, the increase of the contact ratio, and as a result, the decrease of transmission errors of the drive caused by misalignment. The time for preparation of the models is substantially redu ced due to application of the authors’ approach of automatic generation of finite element models [1] for determination of transmission errors of a loaded gear drive.AcknowledgementsThe authors express their deep gratitude to the Gleason Foundation, and the Yamaha Motor Co., Japan, for the financial support of the projects.References[1] J. Argyris, A. Fuentes and F.L. Litvin, Computerized integrated approach for design and stress analysis of spiral bevel gears, Comput. Methods Appl. Mech. Engrg. 191 (2002), pp. 1057–1095.[2] Gleason Works, Understanding Tooth Contact Analysis, Rochester, New York, 1970.[3] Hibbit, Karlsson & Sirensen, Inc., ABAQUS/Standard User’s Manual, 1800 Main Street, Pawtucket, RI 20860-4847, 1998.[4] Klingelnberg und Söhne, Ettlingen, Kimos: Zahnkontakt-Analyse für Kegelräder, 1996.[5] F.L. Litvin et al., Helical and spur gear drive with double crowned pinion tooth surfaces and conjugated gear tooth surfaces, USA Patent 6,205,879, 2001.[6] F.L. Litvin, A. Fuentes and K. Hayasaka, Design, manufacture, stress analysis, and experimental tests of low-noise high endurance spiral bevel gears, Mech. Mach. Theory 41 (2006), pp. 83–118.[7] F.L. Litvin and A. Fuentes, Gear Geometry and Applied Theory (second ed.), Cambridge University Press, New York (2004).[8] J.J. Moré, B.S. Garbow, K.E. Hillstrom, Use r Guide for MINPACK-1, Argonne National Laboratory Report ANL-80-74, Argonne, Illinois, 1980.[9] A.D. Pierce, Acoustics. An Introduction to Its Physical Principles and Applications, Acoustical Society of America (1994).[10] J.D. Smith, Gears and Their Vibration, Marcel Dekker, New York (1983).[11] H.J. Stadtfeld, Gleason Bevel Gear Technology—Manufacturing, Inspection and Optimization, Collected Publications, The Gleason Works, Rochester, New York (1995).译文减少偏离齿轮传动装载和卸载时的噪音摘要齿轮传动时产生震动和噪音的主要原因是传输误差。
tetgen剖分软件用户手册
. . . . . . .
. . . . . . .
. . . . . . .
. . . . . . .
. . . . . . .
. . . . . . .
. . . . . . .
. . . . . . .
. . . . . . .
. . . . . . .
. . . . . . .
. . . . . . .
2
Contents
1 Introduction 1.1 Triangulations of Point Sets . . . . . . . . . . . . . . . . . . 1.1.1 Delaunay Triangulations, Voronoi Diagrams . . . . . 1.1.2 Weighted Delaunay Triangulations, Power Diagrams . 1.1.3 Algorithms . . . . . . . . . . . . . . . . . . . . . . . 1.2 Tetrahedral Meshes . . . . . . . . . . . . . . . . . . . . . . . 1.2.1 Piecewise Linear Complexes . . . . . . . . . . . . . . 1.2.2 Boundary Conformity, Steiner Points . . . . . . . . . 1.2.3 Constrained Delaunay Tetrahedralizations . . . . . . 1.2.4 Mesh Quality, Tetrahedron Shape Measures . . . . . 1.2.5 Mesh Size, Mesh Adaptation . . . . . . . . . . . . . . 1.2.6 Mesh Optimization . . . . . . . . . . . . . . . . . . . 1.2.7 Algorithms . . . . . . . . . . . . . . . . . . . . . . . 2 Getting Started 2.1 Compilation . . . . . . . . . . . . 2.1.1 Unix/Linux/MacOSX . . 2.1.2 Windows 9x/NT/2000/XP 2.2 Testing . . . . . . . . . . . . . . . 2.3 Visualization . . . . . . . . . . . 2.3.1 TetView . . . . . . . . . . 2.3.2 Medit . . . . . . . . . . . . . . . . . . . . . . . 5 6 6 8 10 11 12 13 14 15 18 19 19 21 21 21 23 24 27 27 28 29 29 29 31 34 36 38 39 40 40 41 42 43 43 43
Empirical processes of dependent random variables
2
Preliminaries
n i=1
from R to R. The centered G -indexed empirical process is given by (P n − P )g = 1 n
n
the marginal and empirical distribution functions. Let G be a class of measurabrocesses that have been discussed include linear processes and Gaussian processes; see Dehling and Taqqu (1989) and Cs¨ org˝ o and Mielniczuk (1996) for long and short-range dependent subordinated Gaussian processes and Ho and Hsing (1996) and Wu (2003a) for long-range dependent linear processes. A collection of recent results is presented in Dehling, Mikosch and Sorensen (2002). In that collection Dedecker and Louhichi (2002) made an important generalization of Ossiander’s (1987) result. Here we investigate the empirical central limit problem for dependent random variables from another angle that avoids strong mixing conditions. In particular, we apply a martingale method and establish a weak convergence theory for stationary, causal processes. Our results are comparable with the theory for independent random variables in that the imposed moment conditions are optimal or almost optimal. We show that, if the process is short-range dependent in a certain sense, then the limiting behavior is similar to that of iid random variables in that the limiting distribution is a Gaussian process and the norming √ sequence is n. For long-range dependent linear processes, one needs to apply asymptotic √ expansions to obtain n-norming limit theorems (Section 6.2.2). The paper is structured as follows. In Section 2 we introduce some mathematical preliminaries necessary for the weak convergence theory and illustrate the essence of our approach. Two types of empirical central limit theorems are established. Empirical processes indexed by indicators of left half lines, absolutely continuous functions, and piecewise differentiable functions are discussed in Sections 3, 4 and 5 respectively. Applications to linear processes and iterated random functions are made in Section 6. Section 7 presents some integral and maximal inequalities that may be of independent interest. Some proofs are given in Sections 8 and 9.
INTERNATIONAL JOURNAL OF CIRCUIT THEORY AND APPLICATIONS

INTERNATIONAL JOURNAL OF CIRCUIT THEORY AND APPLICATIONSInt.J.Circ.Theor.Appl.2006;34:559–582Published online in Wiley InterScience().DOI:10.1002/cta.375A wavelet-based piecewise approach for steady-state analysisof power electronics circuitsK.C.Tam,S.C.Wong∗,†and C.K.TseDepartment of Electronic and Information Engineering,Hong Kong Polytechnic University,Hong KongSUMMARYSimulation of steady-state waveforms is important to the design of power electronics circuits,as it reveals the maximum voltage and current stresses being imposed upon specific devices and components.This paper proposes an improved approach tofinding steady-state waveforms of power electronics circuits based on wavelet approximation.The proposed method exploits the time-domain piecewise property of power electronics circuits in order to improve the accuracy and computational efficiency.Instead of applying one wavelet approximation to the whole period,several wavelet approximations are applied in a piecewise manner tofit the entire waveform.This wavelet-based piecewise approximation approach can provide very accurate and efficient solution,with much less number of wavelet terms,for approximating steady-state waveforms of power electronics circuits.Copyright2006John Wiley&Sons,Ltd.Received26July2005;Revised26February2006KEY WORDS:power electronics;switching circuits;wavelet approximation;steady-state waveform1.INTRODUCTIONIn the design of power electronics systems,knowledge of the detailed steady-state waveforms is often indispensable as it provides important information about the likely maximum voltage and current stresses that are imposed upon certain semiconductor devices and passive compo-nents[1–3],even though such high stresses may occur for only a brief portion of the switching period.Conventional methods,such as brute-force transient simulation,for obtaining the steady-state waveforms are usually time consuming and may suffer from numerical instabilities, especially for power electronics circuits consisting of slow and fast variations in different parts of the same waveform.Recently,wavelets have been shown to be highly suitable for describingCorrespondence to:S.C.Wong,Department of Electronic and Information Engineering,Hong Kong Polytechnic University,Hunghom,Hong Kong.†E-mail:enscwong@.hkContract/sponsor:Hong Kong Research Grants Council;contract/grant number:PolyU5237/04ECopyright2006John Wiley&Sons,Ltd.560K.C.TAM,S.C.WONG AND C.K.TSEwaveforms with fast changing edges embedded in slowly varying backgrounds[4,5].Liu et al.[6] demonstrated a systematic algorithm for approximating steady-state waveforms arising from power electronics circuits using Chebyshev-polynomial wavelets.Moreover,power electronics circuits are piecewise varying in the time domain.Thus,approx-imating a waveform with one wavelet approximation(ing one set of wavelet functions and hence one set of wavelet coefficients)is rather inefficient as it may require an unnecessarily large wavelet set.In this paper,we propose a piecewise approach to solving the problem,using as many wavelet approximations as the number of switch states.The method yields an accurate steady-state waveform descriptions with much less number of wavelet terms.The paper is organized as follows.Section2reviews the systematic(standard)algorithm for approximating steady-state waveforms using polynomial wavelets,which was proposed by Liu et al.[6].Section3describes the procedure and formulation for approximating steady-state waveforms of piecewise switched systems.In Section4,application examples are presented to evaluate and compare the effectiveness of the proposed piecewise wavelet approximation with that of the standard wavelet approximation.Finally,we give the conclusion in Section5.2.REVIEW OF WA VELET APPROXIMATIONIt has been shown that wavelet approximation is effective for approximating steady-state waveforms of power electronics circuits as it takes advantage of the inherent nature of wavelets in describing fast edges which have been embedded in slowly moving backgrounds[6].Typically,power electronics circuits can be represented by a time-varying state-space equation˙x=A(t)x+U(t)(1) where x is the m-dim state vector,A(t)is an m×m time-varying matrix,and U is the inputfunction.Specifically,we writeA(t)=⎡⎢⎢⎢⎣a11(t)a12(t)···a1m(t)............a m1(t)a m2(t)···a mm(t)⎤⎥⎥⎥⎦(2)andU(t)=⎡⎢⎢⎢⎣u1(t)...u m(t)⎤⎥⎥⎥⎦(3)In the steady state,the solution satisfiesx(t)=x(t+T)for0 t T(4) where T is the period.For an appropriate translation and scaling,the boundary condition can be mapped to the closed interval[−1,1]x(+1)=x(−1)(5) Copyright2006John Wiley&Sons,Ltd.Int.J.Circ.Theor.Appl.2006;34:559–582A WA VELET-BASED PIECEWISE APPROACH FOR STEADY-STATE ANALYSIS561 Assume that the basic time-invariant approximation equation isx i(t)=K T i W(t)for−1 t 1and i=1,2,...,m(6) where W(t)is any wavelet basis of size2n+1+1(n being the wavelet level),K T i=[k i,0,...,k i,2n+1] is a coefficient vector of dimension2n+1+1,which is to be found.‡The wavelet transformedequation of(1)isKD W=A(t)K W+U(t)(7)whereK=⎡⎢⎢⎢⎢⎢⎢⎢⎣k1,0k1,1···k1,2n+1k2,0k2,1···k2,2n+1............k m,0k m,1···k m,2n+1⎤⎥⎥⎥⎥⎥⎥⎥⎦(8)Thus,(7)can be written generally asF(t)K=−U(t)(9) where F(t)is a m×(2n+1+1)m matrix and K is a(2n+1+1)m-dim vector,given byF(t)=⎡⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣a11(t)W T(t)−W T(t)D T···a1i(t)W T(t)···a1m W T(t)...............a i1(t)W T(t)···a ii(t)W T(t)−W T(t)D T···a im W T(t)...............a m1(t)W T(t)···a mi(t)W T(t)···a mm W T(t)−W T(t)D T⎤⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦(10)K=[K T1···K T m]T(11)Note that since the unknown K is of dimension(2n+1+1)m,we need(2n+1+1)m equations. Now,the boundary condition(5)provides m equations,i.e.[W(+1)−W(−1)]T K i=0for i=1,...,m(12) This equation can be easily solved by applying an appropriate interpolation technique or via direct numerical convolution[11].Liu et al.[6]suggested that the remaining2n+1m equations‡The construction of wavelet basis has been discussed in detail in Reference[6]and more formally in Reference[7].For more details on polynomial wavelets,see References[8–10].Copyright2006John Wiley&Sons,Ltd.Int.J.Circ.Theor.Appl.2006;34:559–582562K.C.TAM,S.C.WONG AND C.K.TSEare obtained by interpolating at2n+1distinct points, i,in the closed interval[−1,1],and the interpolation points can be chosen arbitrarily.Then,the approximation equation can be written as˜FK=˜U(13)where˜F= ˜F1˜F2and˜U=˜U1˜U2(14)with˜F1,˜F2,˜U1and˜U2given by˜F1=⎡⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣[W(+1)−W(−1)]T(00···0)···(00···0)(00···0)[W(+1)−W(−1)]T···(00···0)............(00···0)2n+1+1columns(00···0)···[W(+1)−W(−1)]T(2n+1+1)m columns⎤⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎫⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎬⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎭m rows(15)˜F2=⎡⎢⎢⎢⎢⎢⎢⎢⎢⎣F( 1)F( 2)...F( 2n+1)(2n+1+1)m columns⎤⎥⎥⎥⎥⎥⎥⎥⎥⎦⎫⎪⎪⎪⎪⎪⎪⎪⎪⎬⎪⎪⎪⎪⎪⎪⎪⎪⎭2n+1m rows(16)˜U1=⎡⎢⎢⎢⎣...⎤⎥⎥⎥⎦⎫⎪⎪⎪⎬⎪⎪⎪⎭m elements(17)˜U2=⎡⎢⎢⎢⎢⎢⎣−U( 1)−U( 2)...−U( 2n+1)⎤⎥⎥⎥⎥⎥⎦⎫⎪⎪⎪⎪⎪⎬⎪⎪⎪⎪⎪⎭2n+1m elements(18)Finally,by solving(13),we obtain all the coefficients necessary for generating an approximate solution for the steady-state system.Copyright2006John Wiley&Sons,Ltd.Int.J.Circ.Theor.Appl.2006;34:559–582A WA VELET-BASED PIECEWISE APPROACH FOR STEADY-STATE ANALYSIS5633.WA VELET-BASED PIECEWISE APPROXIMATION METHODAlthough the above standard algorithm,given in Reference[6],provides a well approximated steady-state solution,it does not exploit the piecewise switched nature of power electronics circuits to ease computation and to improve accuracy.Power electronics circuits are defined by a set of linear differential equations governing the dynamics for different intervals of time corresponding to different switch states.In the following,we propose a wavelet approximation algorithm specifically for treating power electronics circuits.For each interval(switch state),we canfind a wavelet representation.Then,a set of wavelet representations for all switch states can be‘glued’together to give a complete steady-state waveform.Formally,consider a p-switch-state converter.We can write the describing differential equation, for switch state j,as˙x j=A j x+U j for j=1,2,...,p(19) where A j is a time invariant matrix at state j.Equation(19)is the piecewise state equation of the system.In the steady state,the solution satisfies the following boundary conditions:x j−1(T j−1)=x j(0)for j=2,3,...,p(20) andx1(0)=x p(T p)(21)where T j is the time duration of state j and pj=1T j=T.Thus,mapping all switch states to the close interval[−1,1]in the wavelet space,the basic approximate equation becomesx j,i(t)=K T j,i W(t)for−1 t 1(22) with j=1,2,...,p and i=1,2,...,m,where K T j,i=[k1,i,0···k1,i,2n+1,k2,i,0···k2,i,2n+1,k j,i,0···k j,i,2n+1]is a coefficient vector of dimension(2n+1+1)×p,which is to be found.Asmentioned previously,the state equation is transformed to the wavelet space and then solved by using interpolation.The approximation equation is˜F(t)K=−˜U(t)(23) where˜F=⎡⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣˜F˜F1˜F2...˜Fp⎤⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦and˜U=⎡⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣˜U˜U1˜U2...˜Up⎤⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦(24)Copyright2006John Wiley&Sons,Ltd.Int.J.Circ.Theor.Appl.2006;34:559–582564K.C.TAM,S.C.WONG AND C.K.TSEwith ˜F0,˜F 1,˜F 2,˜F p ,˜U 0,˜U 1,˜U 2and ˜U p given by ˜F 0=⎡⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣F a 00···F b F b F a 0···00F b F a ···0...............00···F b F a (2n +1+1)×m ×p columns⎤⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎫⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎬⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎭m ×p rows (F a and F b are given in (33)and (34))(25)˜F 1=⎡⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣F ( 1)0 0F ( 2)0 0............F ( 2n +1) (2n +1+1)m columns 0(2n +1+1)m columns···0 (2n +1+1)m columns(2n +1+1)×m ×p columns⎤⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎫⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎬⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎭2n +1m rows(26)˜F 2=⎡⎢⎢⎢⎢⎢⎢⎢⎢⎣0F ( 1)···00F ( 2)···0............0(2n +1+1)m columnsF ( 2n +1)(2n +1+1)m columns···(2n +1+1)m columns⎤⎥⎥⎥⎥⎥⎥⎥⎥⎦(27)˜F p =⎡⎢⎢⎢⎢⎢⎢⎢⎢⎣0···0F ( 1)0···0F ( 2)...... 0(2n +1+1)m columns···(2n +1+1)m columnsF ( 2n +1)(2n +1+1)m columns⎤⎥⎥⎥⎥⎥⎥⎥⎥⎦(28)˜U0=⎡⎢⎢⎢⎣0 0⎤⎥⎥⎥⎦⎫⎪⎪⎪⎬⎪⎪⎪⎭m ×p elements(29)Copyright 2006John Wiley &Sons,Ltd.Int.J.Circ.Theor.Appl.2006;34:559–582A WA VELET-BASED PIECEWISE APPROACH FOR STEADY-STATE ANALYSIS565˜U1=⎡⎢⎢⎢⎢⎢⎣−U( 1)−U( 2)...−U( 2n+1)⎤⎥⎥⎥⎥⎥⎦⎫⎪⎪⎪⎪⎪⎬⎪⎪⎪⎪⎪⎭2n+1m elements(30)˜U2=⎡⎢⎢⎢⎢⎣−U( 1)−U( 2)...−U( 2n+1)⎤⎥⎥⎥⎥⎦(31)˜Up=⎡⎢⎢⎢⎢⎢⎣−U( 1)−U( 2)...−U( 2n+1)⎤⎥⎥⎥⎥⎥⎦(32)F a=⎡⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣[W(−1)]T0 00[W(−1)]T 0............00···[W(−1)]T(2n+1+1)m columns⎤⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎫⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎬⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎭m rows(33)F b=⎡⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣[−W(+1)]T0 00[−W(+1)]T 0............00···[−W(+1)]T(2n+1+1)m columns⎤⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎫⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎬⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎭m rows(34)Similar to the standard approach outlined in Section2,all the coefficients necessary for gener-ating approximate solutions for each switch state for the steady-state system can be obtained by solving(23).It should be noted that the wavelet-based piecewise method can be further enhanced for approx-imating steady-state solution using different wavelet levels for different switch states.Essentially, Copyright2006John Wiley&Sons,Ltd.Int.J.Circ.Theor.Appl.2006;34:559–582566K.C.TAM,S.C.WONG AND C.K.TSEwavelets of high levels should only be needed to represent waveforms in switch states where high-frequency details are present.By using different choices of wavelet levels for different switch states,solutions can be obtained more quickly.Such an application of varying wavelet levels for different switch intervals can be easily incorporated in the afore-described algorithm.4.APPLICATION EXAMPLESIn this section,we present four examples to demonstrate the effectiveness of our proposed wavelet-based piecewise method for steady-state analysis of switching circuits.The results will be evaluated using the mean relative error (MRE)and mean absolute error (MAE),which are defined byMRE =12 1−1ˆx (t )−x (t )x (t )d t (35)MAE =12 1−1|ˆx (t )−x (t )|d t (36)where ˆx (t )is the wavelet-approximated value and x (t )is the SPICE simulated result.The SPICE result,being generated from exact time-domain simulation of the actual circuit at device level,can be used for comparison and evaluation.In discrete forms,MAE and MRE are simply given byMRE =1N Ni =1ˆx i −x i x i(37)MAE =1N Ni =1|ˆx i −x i |(38)where N is the total number of points sampled along the interval [−1,1]for error calculation.In the following,we use uniform sampling (i.e.equal spacing)with N =1001,including boundary points.4.1.Example 1:a single pulse waveformConsider the single pulse waveform shown in Figure 1.This is an example of a waveform that cannot be efficiently approximated by the standard wavelet algorithm.The waveform consists of five segments corresponding to five switch states (S1–S5),and the corresponding state equations are given by (19),where A j and U j are given specifically asA j =⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩0if 0 t <t 10if t 1 t <t 21if t 2 t <t 30if t 3 t <t 40if t 4 t T(39)Copyright 2006John Wiley &Sons,Ltd.Int.J.Circ.Theor.Appl.2006;34:559–582A WA VELET-BASED PIECEWISE APPROACH FOR STEADY-STATE ANALYSIS567S1S2S3S4S50t1t2t3t4THFigure 1.A single pulse waveform consisting of 5switch states.andU j =⎧⎪⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎪⎩0if 0 t <t 1H /(t 2−t 1)if t 1 t <t 2−Hif t 2 t <t 3−H /(t 4−t 3)if t 3 t <t 40if t 4 t T(40)where H is the amplitude (see Figure 1).Switch states 2(S2)and 4(S4)correspond to the rising edge and falling edge,respectively.Obviously,when the widths of rising and falling edges are small (relative to the whole switching period),the standard wavelet method cannot provide a satisfactory approximation for this waveform unless very high wavelet levels are used.Theoretically,the entire pulse-like waveform can be very accurately approximated by a very large number of wavelet terms,but the computational efforts required are excessive.As mentioned before,since the piecewise approach describes each switch interval separately,it yields an accurate steady-state waveform description for each switch interval with much less number of wavelet terms.Figures 2(a)and (b)compare the approximated pulse waveforms using the proposed wavelet-based piecewise method and the standard wavelet method for two different choices of wavelet levels with different widths of rising and falling edges.This example clearly shows the benefits of the wavelet-based piecewise approximation using separate sets of wavelet coefficients for the different switch states.Copyright 2006John Wiley &Sons,Ltd.Int.J.Circ.Theor.Appl.2006;34:559–582568K.C.TAM,S.C.WONG AND C.K.TSE0−0.2−0.4−0.6−0.8−1−20−15−10−50.20.40.60.81−0.2−0.4−0.6−0.8−10.20.40.60.81(a)051015(b)Figure 2.Approximated pulse waveforms with amplitude 10.Dotted line is the standard wavelet approx-imated waveforms using wavelets of levels from −1to 5.Solid lines are the actual waveforms and the wavelet-based piecewise approximated waveforms using wavelets of levels from −1to 1:(a)switch states 2and 4with rising and falling times both equal to 5per cent of the period;and (b)switch states 2and 4with rising and falling times both equal to 1per cent of the period.4.2.Example 2:simple buck converterThe second example is the simple buck converter shown in Figure 3.Suppose the switch has a resistance of R s when it is turned on,and is practically open-circuit when it is turned off.The diode has a forward voltage drop of V f and an on-resistance of R d .The on-time and off-time equivalent circuits are shown in Figure 4.The basic system equation can be readily found as˙x=A (t )x +U (t )(41)where x =[i L v o ]T ,and A (t )and U (t )are given byA (t )=⎡⎢⎣−R d s (t )L −1L 1C −1RC⎤⎥⎦(42)U (t )=⎡⎣E (1−s (t ))+V f s (t )L⎤⎦(43)Copyright 2006John Wiley &Sons,Ltd.Int.J.Circ.Theor.Appl.2006;34:559–582Figure3.Simple buck convertercircuit.Figure4.Equivalent linear circuits of the buck converter:(a)during on time;and(b)during off time.Table ponent and parameter values for simulationof the simple buck converter.Component/parameter ValueMain inductance,L0.5mHCapacitance,C0.1mFLoad resistance,R10Input voltage,E100VDiode forward drop,V f0.8VSwitching period,T100 sOn-time,T D40 sSwitch on-resistance,R s0.001Diode on-resistance,R d0.001with s(t)defined bys(t)=⎧⎪⎨⎪⎩0for0 t T D1for T D t Ts(t−T)for all t>T(44)We have performed waveform approximations using the standard wavelet method and the proposed wavelet-based piecewise method.The circuit parameters are shown in Table I.We also generate waveforms from SPICE simulations which are used as references for comparison. The approximated inductor current is shown in Figure5.Simple visual inspection reveals that the wavelet-based piecewise approach always gives more accurate waveforms than the standard method.Copyright2006John Wiley&Sons,Ltd.Int.J.Circ.Theor.Appl.2006;34:559–582−0.5−10.51−0.5−10.51012345670123456712345671234567(a)(b)(c)(d)Figure 5.Inductor current waveforms of the buck converter.Solid line is waveform from piecewise wavelet approximation,dotted line is waveform from SPICE simulation and dot-dashed line is waveform using standard wavelet approximation.Note that the solid lines are nearly overlapping with the dotted lines:(a)using wavelets of levels from −1to 0;(b)using wavelets of levels from −1to 1;(c)using wavelets oflevels from −1to 4;and (d)using wavelets of levels from −1to 5.Table parison of MREs for approximating waveforms for the simple buck converter.Wavelet Number of MRE for i L MRE for v C CPU time (s)MRE for i L MRE for v C CPU time (s)levels wavelets (standard)(standard)(standard)(piecewise)(piecewise)(piecewise)−1to 030.9773300.9802850.0150.0041640.0033580.016−1to 150.2501360.1651870.0160.0030220.0024000.016−1to 290.0266670.0208900.0320.0030220.0024000.046−1to 3170.1281940.1180920.1090.0030220.0024000.110−1to 4330.0593070.0538670.3750.0030220.0024000.407−1to 5650.0280970.025478 1.4380.0030220.002400 1.735−1to 61290.0122120.011025 6.1880.0030220.0024009.344−1to 72570.0043420.00373328.6410.0030220.00240050.453In order to compare the results quantitatively,MREs are computed,as reported in Table II and plotted in Figure 6.Finally we note that the inductor current waveform has been very well approximated by using only 5wavelets of levels up to 1in the piecewise method with extremelyCopyright 2006John Wiley &Sons,Ltd.Int.J.Circ.Theor.Appl.2006;34:559–582123456700.10.20.30.40.50.60.70.80.91M R E (m e a n r e l a t i v e e r r o r )Wavelet Levelsinductor current : standard method inductor current : piecewise methodFigure parison of MREs for approximating inductor current for the simple buck converter.small MREs.Furthermore,as shown in Table II,the CPU time required by the standard method to achieve an MRE of about 0.0043for i L is 28.64s,while it is less than 0.016s with the proposed piecewise approach.Thus,we see that the piecewise method is significantly faster than the standard method.4.3.Example 3:boost converter with parasitic ringingsNext,we consider the boost converter shown in Figure 7.The equivalent on-time and off-time circuits are shown in Figure 8.Note that the parasitic capacitance across the switch and the leakage inductance are deliberately included to reveal waveform ringings which are realistic phenomena requiring rather long simulation time if a brute-force time-domain simulation method is used.The state equation of this converter is given by˙x=A (t )x +U (t )(45)where x =[i m i l v s v o ]T ,and A (t )and U (t )are given byA (t )=A 1(1−s (t ))+A 2s (t )(46)U (t )=U 1(1−s (t ))+U 2s (t )(47)Copyright 2006John Wiley &Sons,Ltd.Int.J.Circ.Theor.Appl.2006;34:559–582Figure7.Simple boost convertercircuit.Figure8.Equivalent linear circuits of the boost converter including parasitic components:(a)for on time;and(b)for off time.with s(t)defined earlier in(44)andA1=⎡⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣−R mL mR mL m00R mL l−R l+R mL l−1L l1C s−1R s C s000−1RC⎤⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦(48)A2=⎡⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣−R mR dL mR m R dL m0−R mL m d mR m R dL l−R mR d+R lL l−1L lR mL l d m1C s00R mC(R d+R m)−R mC(R d+R m)0−R+R m+R dC R(R d+R m)⎤⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦(49)Copyright2006John Wiley&Sons,Ltd.Int.J.Circ.Theor.Appl.2006;34:559–582U1=⎡⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣EL m⎤⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦(50)U2=⎡⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣EL m−R m V fL m d mR m V fL l(R d+R m)−V f R mC(R d m⎤⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦(51)Again we compare the approximated waveforms of the leakage inductor current using the proposed piecewise method and the standard wavelet method.The circuit parameters are listed in Table III.Figures9(a)and(b)show the approximated waveforms using the piecewise and standard wavelet methods for two different choices of wavelet levels.As expected,the piecewise method gives more accurate results with wavelets of relatively low levels.Since the waveform contains a substantial portion where the value is near zero,we use the mean absolute error(MAE)forTable ponent and parameter values for simulation ofthe boost converter.Component/parameter ValueMain inductance,L m200 HLeakage inductance,L l1 HParasitic resistance,R m1MOutput capacitance,C200 FLoad resistance,R10Input voltage,E10VDiode forward drop,V f0.8VSwitching period,T100 sOn-time,T D40 sParasitic lead resistance,R l0.5Switch on-resistance,R s0.001Switch capacitance,C s200nFDiode on-resistance,R d0.001Copyright2006John Wiley&Sons,Ltd.Int.J.Circ.Theor.Appl.2006;34:559–5820−0.2−0.4−0.6−0.8−1−50.20.40.60.815100(a)(b)−50.20.40.60.81510Figure 9.Leakage inductor waveforms of the boost converter.Solid line is waveform from wavelet-based piecewise approximation,dotted line is waveform from SPICE simulation and dot-dashed line is waveform using standard wavelet approximation:(a)using wavelets oflevels from −1to 4;and (b)using wavelets of levels from −1to 5.Table IV .Comparison of MAEs for approximating the leakage inductor currentfor the boost converter.Wavelet Number MAE for i l CPU time (s)MAE for i l CPU time (s)levels of wavelets(standard)(standard)(piecewise)(piecewise)−1to 3170.4501710.1250.2401820.156−1to 4330.3263290.4060.1448180.625−1to 5650.269990 1.6410.067127 3.500−1to 61290.2118157.7970.06399521.656−1to 72570.13254340.6250.063175171.563evaluation.From Table IV and Figure 10,the result clearly verifies the advantage of using the proposed wavelet-based piecewise method.Furthermore,inspecting the two switch states of the boost converter,it is obvious that switch state 2(off-time)is richer in high-frequency details,and therefore should be approximated with wavelets of higher levels.A more educated choice of wavelet levels can shorten the simulationCopyright 2006John Wiley &Sons,Ltd.Int.J.Circ.Theor.Appl.2006;34:559–582345670.050.10.150.20.250.30.350.40.450.5M A E (m e a n a b s o l u t e e r r o r )Wavelet Levelsleakage inductor current : standard method leakage inductor current : piecewise methodFigure parison of MAEs for approximating the leakage inductor current for the boost converter.time.Figure 11shows the approximated waveforms with different (more appropriate)choices of wavelet levels for switch states 1(on-time)and 2(off-time).Here,we note that smaller MAEs can generally be achieved with a less total number of wavelets,compared to the case where the same wavelet levels are employed for both switch states.Also,from Table IV,we see that the CPU time required for the standard method to achieve an MAE of about 0.13for i l is 40.625s,while it takes only slightly more than 0.6s with the piecewise method.Thus,the gain in computational speed is significant with the piecewise approach.4.4.Example 4:flyback converter with parasitic ringingsThe final example is a flyback converter,which is shown in Figure 12.The equivalent on-time and off-time circuits are shown in Figure 13.The parasitic capacitance across the switch and the transformer leakage inductance are included to reveal realistic waveform ringings.The state equation of this converter is given by˙x=A (t )x +U (t )(52)where x =[i m i l v s v o ]T ,and A (t )and U (t )are given byA (t )=A 1(1−s (t ))+A 2s (t )(53)U (t )=U 1(1−s (t ))+U 2s (t )(54)Copyright 2006John Wiley &Sons,Ltd.Int.J.Circ.Theor.Appl.2006;34:559–5820−0.2−0.4−0.6−0.8−1−6−4−20.20.40.60.81024680−0.2−0.4−0.6−0.8−1−6−4−20.20.40.60.81024680−0.2−0.4−0.6−0.8−1−6−4−20.20.40.60.81024680−0.2−0.4−0.6−0.8−1−6−4−20.20.40.60.8102468il(A)il(A)il(A)il(A)(a)(b)(c)(d)Figure 11.Leakage inductor waveforms of the boost converter with different choice of wavelet levels for the two switch states.Dotted line is waveform from SPICE simulation.Solid line is waveform using wavelet-based piecewise approximation.Two different wavelet levels,shown in brackets,are used for approximating switch states 1and 2,respectively:(a)(3,4)with MAE =0.154674;(b)(3,5)withMAE =0.082159;(c)(4,5)with MAE =0.071915;and (d)(5,6)with MAE =0.066218.Copyright 2006John Wiley &Sons,Ltd.Int.J.Circ.Theor.Appl.2006;34:559–582。
Overlap-add synthesis of nonstationary sinusoids
After the IFFT, b n] is divided out, which results in a frame containing a sum of partials with constant amplitudes Aq and frequencies !q . The full output is constructed using overlap-add with a triangular window, which provides linear amplitude interpolation. The frequency interpolation is not linear; if the frequency of a partial changes from frame to frame, the OLA involves a sum of sinusoids of di erent frequency, which may result in distortion. This distortion can be lessened by phase-matching the partials in adjacent frames Rodet & Depalle, Goodwin & Rodet]. The OLA distortion can be further alleviated by synthesizing chirps in each frame instead of constant frequency partials; a chirp is a sinusoid with a linearly increasing (or decreasing) frequency, which is expressed as cos((! + n)n + ) = cos(!n + n2 + ). For each partial in each frame a new parameter that describes the rate of frequency change or chirp rate is derived from the partial frequency parameters according to a frequency-matching criterion; this is coupled with phase-matching in the synthesis. The spectral motif for the q2-th partial is then a function of its chirp rate q ; ideally, it should satisfy B (!; ) = Ffb n]ej n g for = q . Since computing B (!; q ) for each partial is costly, a piecewise linear estimate of B (!; ) is used; the chirped motif B (!; p ) is pre-computed and stored for a set f p g spaced throughout the desired range of chirp rates. Then, for p p+1, the function B (!; ) is approximated as a linear interpolation between B (!; p ) and B (!; p+1 ). The distortion improvement provided by this chirp synthesis is illustrated in Goodwin & Rodet]. Any remaining distortion is a result of mismatched chirp rates in adjacent frames. For a 50% overlap ratio, the distortion can be removed altogether by synthesizing partials with two di erent chirp rates in each frame. In this technique, the chirp rate of a partial during the rst half of a frame matches the nal rate of that partial in the previous frame; during the second half, the chirp rate matches the initial rate of the next frame. This results in linear frequency interpolation, which when coupled with the OLA amplitude interpolation implies modeling the signal as a sum of sinusoids with linear amplitude and frequency variations, which are intuitively reasonable components. Note that this approach can be generalized to arbitrary overlap ratios by changing the number of chirps in each frame; the dual-chirp case is adhered to for simplicity. Dual-chirp synthesis can be implemented as follows. First, the chirp rates for each half of a frame are determined using a frequency-matching constraint at the frame boundaries. Then, spectral representations of the rst-half and second-half chirping partials are separately derived using the piecewise linear approximation of B (!; ) as in the single-chirp synthesis; in this case, though, b n] is half the length of a frame. These spectra are processed by two half-size IFFTs, and b n] is divided out of each of the IFFT outputs. Then, the rst-half signal is multiplied by the rising edge of the triangular OLA window and the second-half signal is multiplied by the falling edge. The rst and second half are then merged, and the OLA proceeds as normal. A phase-matching constraint is used in the spectral construction to prevent discontinuities at the boundary of the two halves. Since the nal chirp rate of a frame matches the initial rate of the next frame, only one half-size IFFT must actually be computed for each frame, meaning that this approach entails a computational savings with respect to the single-chirp synthesis. Finally, it should be noted that the dual-chirp synthesis performs the frequency interpolation in the frequency domain and the amplitude interpolation in the time domain; the fact that this approach eliminates the OLA distortion further veri es the e ectiveness of merged time-frequency methods. R. J. McAulay and T. F. Quatieri. Speech analysis/synthesis based on a sinusoidal representation. IEEE Transactions on Acoustics, Speech, and Signal Processing, 34(4), August 1986. X. Rodet and Ph. Depalle. A new additive synthesis method using inverse Fourier transform and spectral envelopes. ICMC, 1992. M. Goodwin and X. Rodet. E cient Fourier synthesis of nonstationary sinusoids. ICMC, 1994.
Intro_MATLAB_2
The Command Window
So far, you have been using the MATLAB command line, typing commands and expressions, and seeing the results printed in the command window. This section describes a few ways of altering the appearance of the command window. If your system allows you to select the command window font or typeface, we recommend you use a fixed width font, such as Fixedsys or Courier, to provide proper spacing.
13
The format Command
The format command controls the numeric format of the values displayed by MATLAB. The command affects only how numbers are displayed, not how MATLAB computes or saves them. Here are the different formats, together with the resulting output produced from a vector x with components of different magnitudes.
4
For example, outside of MATLAB, create a text file containing these four lines: 16.0 3.0 2.0 13.0 5.0 10.0 11.0 8.0 9.0 6.0 7.0 12.0 4.0 15.0 14.0 1.0 Store the file under the name magik.dat. Then the command load magik.dat reads the file and creates a variable, magik, containing our example matrix.
光滑Chua系统异宿轨道存在性的证明
光滑Chua系统异宿轨道存在性的证明陈建军;禹思敏【摘要】本文用待定系数法证明了具有三次多项式光滑Chua系统异宿轨道的存在性.首先,将光滑Chua系统转换为只含有一个变量的非线性微分方程.其次,证明了该非线性微分方程存在一个指数形式的无穷级数展开式表示的异宿轨道.最后,证明了该无穷级数展开式的一致收敛性,结合Shilnikov不等式,论证了该系统存在Smale马蹄,因而是Shilnikov意义下的混沌.%In this paper, the undetermined coefficient method is applied to prove the existence of heteroclinic orbit in a smooth Chua system with a cubic polynomial. Firstly, the smooth Chua system is converted to a nonlinear differential equation with only one variable. Secondly, the nonlinear differential equation is verified to have a heteroclinic orbit expressed by the infinite series expansion with the exponential form. Finally, the uniform convergence of the series expansion of the heteroclinic is proved. Combining the existence of heteroclinic orbit with Shilnikov inequalities, Smale horseshoses has been found in the smooth Chua system, and it is chaotic in the sense of Shilnikov.【期刊名称】《工程数学学报》【年(卷),期】2011(028)005【总页数】9页(P693-701)【关键词】待定系数法;异宿轨道;Shilnikov定理;光滑型Chua系统【作者】陈建军;禹思敏【作者单位】广东工业大学自动化学院,广州510006;广东工业大学自动化学院,广州510006【正文语种】中文【中图分类】O191 引言近年来,混沌在非线性科学、工程和数学等领域中获得了广泛研究和应用[1-3].目前大多数研究混沌的方法是在数值仿真基础上进行的,如计算李氏指数和分岔图等[4,5].而有关严格的数学分析证明混沌存在性的文献却不多[6-8],主要原因是用解析方法论证系统的混沌特性难度较大,从而使得有些混沌系统在提出若干年之后才被严格的数学所证明.Chua系统主要包括分段线性型和光滑型两种基本类型,其混沌机理研究一直为国内外学者所关注.例如,对于三分段线性型Chua系统,Chua在1986年给出了混沌存在性严格的数学证明[6].另一方面,Mees、Li和Chen等提出在满足同宿轨和异宿轨的基本特性、Shilnikov不等式和特征方程等条件下,直接确定状态方程中的各个参数,进而证明了三分段线性型Chua系统,两分段线性型Lorenz系统混沌的存在性[9,10].但有关光滑型Chua系统混沌存在性的结果却鲜见报道.众所周知,最常用的证明自治系统混沌存在性的判定定理是Shilnikov定理[11,12],近年来,Shilnikov方法有了一些新进展[10,13-21],Zhou等用Shilnikov定理对Chen系统的混沌轨道特性进行了详细的分析,并第一次得到其精确的边界[13].Li等基于shilnikov定理证明了Chen系统存在或者不存在同宿轨道和异宿舍轨道时,各个参数应满足的条件[15].文献[19]对Arneodo等提出的具有三个参数的连续分段线性的微分方程族,在结合Hopf-Zero分岔的情况下,证明了系统族存在一类具有两个参数的同宿轨道.特别是对于具有平方项和交叉项的三阶二次型广义Lorenz系统族,Zhou等提出在满足同宿轨和异宿轨基本特性、Shilnikov不等式和特征方程条件下,利用无穷级数展开法,并保证级数的收敛性,证明了同宿轨道和异宿轨道的存在性[16-18].在此基础上,我们基于Shilnikov定理和待定系数法,给出了非线性项为三次多项式的光滑型Chua系统中异宿轨道无穷级数的数学表达式和一致收敛性的结果,由此证明了该系统中异宿轨道的存在性.2 预备知识2.1 Shinikov定理对于一个三阶自治系统式中矢量场f:R3→R3∈Cr(r≥2),设xe∈R3是(1)式的一个平衡点,满足f(xe)=0.若系统在平衡点xe处的Jacobin矩阵J=Df(xe)的特征值为r,σ±jw,且满足σγlt;0,w=0,其中σ,γ,w∈R,则称xe为双曲鞍焦点,简称鞍焦点.假设系统有两个不同的鞍焦平衡点1和2,系统的一个动态有界轨道,当t→±∞,这个轨道都趋近同一个平衡点,则这个轨道就是同宿轨道,而异宿轨道是连接两个不同的鞍焦点类型的平衡点,当t→+∞,轨道趋近平衡点1,而t→−∞,该轨道趋近平衡点2.异宿轨道Shilnikov定理:令xe1和xe2分别为(1)式的两个不同的平衡点,若同时满足以下两个条件,则存在斯梅尔马蹄意义下的混沌.1) xe1和xe2均为鞍焦点,并满足Shilnikov不等式|σi/γi|lt;1(i=1,2),式中γ1γ2gt;0,或者σ1σ2gt;0;2) 存在一条连接两个平衡点xe1和xe2异宿轨道.2.2 具有三次多项式的光滑Chua系统具有三次多项式光滑Chua系统的无量纲状态方程为[22]其中f(x)为三次多项式,其数学表达式为f(x)=cx3−dx.上面(2)式和(3)式中αgt;0,βgt;0,cgt;0,dgt;0为参数,取α=10,β=100/7,c=2/7,d=1/7,得混沌吸引子相图,如图1所示.图1: 光滑Chua系统混沌吸引子相图由(2)和(3)式求得系统的三个平衡点分别为O1(0,0,0),0).从图1可以看出,该系统的轨道交替围绕着平衡点O2和O3旋转,由此可知该系统有一个异宿轨道连接O2和O3.3 光滑Chua系统的异宿轨道经计算,得(2)式中平衡点O2和O3对应的Jacobi矩阵为对应的特征方程为其中记∆=4P3+27Q2,由三次方程求根公式知,当∆gt;0时,(5)式有唯一的负实根γ1和一对共轭复根σ1±jw1,γ1,σ1,w1的数学表达式为根据(5)式和(6)式,得特征方程(4)式的一个实根γ和一对共轭复根σ1±jw分别为可知平衡点O2和O3,它们所对应的Jacobi矩阵都有(7)式的三个相同的根.根据(2)式,得当k=2时,有注意到(14)式中α1=0,否则由(15),(16)式可以得出αk=0(k≥1,k∈N∗),所以有对比(4)式得知l是系统在O3的Jacobi矩阵所对应特征方程的负实根,记经推导,(16)式可以进一步简化为式中C为常数,其数学表达式为其中(i,j,p)∈N∗,且i≥1,j≥1,p≥1.在(2)式中,当∆gt;0时,方程只有唯一的负实根,故当k∈N∗,k≥2时,有由(15)和(16)式,得出αk(k ∈ N∗,k ≥ 2)完全由α,β,c,d,l,α1决定,并且有αk=φk(k∈N∗,k≥2),其中φk(k∈ N∗,k≥2)是关于参数α,β,c,d,l的函数.注意到方程(11)具有对称性,若tgt;0,x(t)是方程(11)的解,而当tlt;0时,−x(−t)也是方程(11)的解.当tlt;0时,得进而得出连接O2和O3的异宿轨道具有如下形式为保证φ(t)的连续性,要求φ(0−)=φ(0+),得显见f(0)=−rlt;0.计算φk(2≤k≤13),得同理,经计算得从上述数据中可知,当k为偶数时,φklt;0;当k为奇数时,φkgt;0(k≥2).于是当k为奇数,且常数α2为充分大正数时,有F(α2)gt;0,由零点定理得F(α1)=0,α1∈(0,α2).由于F′(α1)gt;0,(22)式无重根.当k为偶数时,φklt;0,可以得出方程不存在正实根,它有k/2对共轭复根.表1给出了k为奇数时,(22)式所对应的关于α1正实根的值.表1: k为奇数时,(22)式对应关于α1正实根的值k=3 α1=0.6842 k=5α1=0.6285 k=7 α1=0.6197 k=9 α1=0.6117 k=11 α1=0.6051 k=13α1=0.5996当k继续增大时,计算可知α1的值基本稳定在0.5996,于是可近似认为α1=0.5996,因此数值仿真可以说明满足方程(22)的α1确实存在.下面证明无穷级数(12)式的一致收敛性.4 异宿轨道的收敛性现仅考虑能产生混沌吸引子的典型参数α=10,β=100/7,c=2/7,d=1/7,对于其它参数,如果它的异宿轨道存在,证明与此相似.当tgt;0时,由(15)和(16)式得故Ak单调递减且收敛于0.注意到Bk是系数α1,α2,···,αk−1的不高于三次的多项式函数.由(21)式知α1,α2,···,αk−1有界,于是Bk有界,其部分和序列也有界.因此,由Dirichlet判别法,得以下级数收敛于是|φ(t)|收敛.同理可证明当tlt;0时,|φ(t)|也收敛.显然满足Shilnikov不等式,其中的一个异宿轨道如图2所示.图2: α=10,β=100/7,c=2/7,d=1/7时光滑Chua系统的异宿轨道当∆gt;0时,由(6)式和(7)式,得γlt;0.对于(4)式,由根与系数的关系得由(23)式,得γ+2σlt;0.故只须σgt;0,Shilnikov不等式|σ/γ|lt;1成立,若σgt;0,有经上述分析,可得出如下结论:若光滑Chua系统参数αgt;0,βgt;0,cgt;0,dgt;0,满足∆gt;0和(24)式,并有(20)式所表示的异宿轨道时,该系统是Shilnikov意义下的混沌.5 结论基于Shilnikov定理和待定系数法,对参数α=10,β=100/7,c=2/7,d=1/7的非线性项为三次多项式光滑Chua系统进行了研究.导出了异宿轨道无穷级数的数学表达式,并证明了其一致收敛性,由此证明了该系统中存在一条Shilnikov类型的异宿轨道,根据Shilnikov判定定理,知该系统有Smale马蹄,因而是Shilnikov意义下的混沌.参考文献:【相关文献】[1]Lv J H,Chen G R.Generating multiscroll chaotic attractors:theories,metholds and applications[J].International Journal of Bifurcation and Chaos,2006,16(4):775-858[2]李战国,徐伟.不确定混沌系统自适应改进投影同步与参数估计[J].工程数学学报,2010,27(1):30-36 Li Z G,Xu W.Adaptive modif i ed projective synchronization and parameter estimation for chaotic systems with uncertain parameters[J].Chinese Journal of Engineering Mathematics,2010,27(1):30-36[3]Lou J,Wen Q Z.Modelling cancer dynamics in HIV-1 infected individuals[J].Chinese Journal of Engineering Mathematics,2010,27(2):375-379[4]Yu S M,Tang K S,Chen G R.Generation of n×m-scroll attractors under a Chua-circuit framework[J].International Journal of Bifurcation and Chaos,2007,17(11):3951-3964 [5]Tsuneda A.A gallery of attractors from smooth Chua’s equation[J].International Journal of Bifurcation and Chaos,2005,15(1):1-49[6]Chua L,Komuro M,Matsumto T.The double scroll family[J].IEEE Transaction on Circuits and System,1986,33(11):1072-1118[7]Stewart I.The Lorenz attractor exists[J].Nature,2002,406:948-949[8]Matsumoto T,Chua L O,Ayaki K.Reality of chaos in the double scroll circuit:a computer-assisted proof[J].IEEE Transaction on Circuits and System,1988,35(7):909-925[9]Mees A I,Chapman P B.Homoclinic and heteroclinic orbits in the double scroll attractor[J].IEEE Transaction on Circuits and System,1987,34(9):1115-1120[10]Li Z,Chen G R,Halang W A.Homoclinic and heteroclinic orbits in a modif i ed Lorenz system[J].Information Sciences,2004,165(3-4):235-245[11]Shilnikov L P.A case of the existence of a countable number of periodicmotions[J].Soviet Mathmatics Docklady,1965,6:163-166[12]Shilnikov L P.On a new type of bifurcation of multidimensional dynamicalsystems[J].Soviet Mathmatics,1969,10(1):1368-1371[13]Zhou T S,Tang Y,Chen G plex dynamical behaviors of the chaotic Chen’s system[J].International Journal of Bifurcation and Chaos,2003,13(9):2561-2574[14]Li X L,Li X M,Zheng Z H.Homoclinic shadowing and its application to chaotic systems[J].International Journal of Bifurcation and Chaos,2008,18(5):1363-1375[15]Li T,Chen G T,Chen G R.On homoclinic and heteroclinic orbits of Chen’ssystem[J].International Journal of Bifurcation and Chaos,2006,16(10):3035-3041[16]Zhou T S,Tang Y,Chen G R.Chen’s attractor exists[J].International Journal of Bifurcation and Chaos,2004,14(9):3167-3177[17]Zhou T S,Chen G R.Classification of chaos in 3d autonomous quadratic system-1 basic framwork and methods[J].International Journal of Bifurcation and Chaos,2006,16(9):2459-2479[18]Sun F Y.Shilnikov heteroclinic orbits in a chaotic system[J].International Journal of Modern Physics B,2007,21(25):4429-4436[19]Llibre J,Ponce E,Teruel A E.Horseshoes near homoclinic orbits for piecewise linear differential system in R3[J].International Journal of Bifurcation and Chaos,2007,17(4):1171-1184[20]Lin W,Chen G R.Heteroclinical repellers imply chaos[J].International Journal of Bifurcation and Chaos,2006,16(5):1471-1489[21]Yao M H,Zhang W.Shilnikov-type multipulse orbits and chaotic dynamics of a parametrically and externally excited rectangular chin plate[J].International Journal of Bifurcation and Chaos,2007,17(3):851-875[22]Zhong G Q.Implemention of Chua’s circuit with a cubic nonlinearity[J].IEEE Transaction on Circuits and System,1994,41(12):934-941。
宽范围CLLLC双向同步整流数字控制方法
2022年7月电工技术学报Vol.37 No. 14 第37卷第14期TRANSACTIONS OF CHINA ELECTROTECHNICAL SOCIETY Jul. 2022DOI: 10.19595/ki.1000-6753.tces.210152宽范围CLLLC双向同步整流数字控制方法廖嘉睿1杭丽君1但志敏2何远彬1高锦凤2(1. 杭州电子科技大学区域能源互联网技术浙江省工程实验室杭州 3100182. 宁德时代新能源科技有限公司宁德 352000)摘要为解决车载充电器(OBC)系统的双向CLLLC谐振变换器在宽范围工作条件下效率过低、开关管温度过高等问题,该文提出一种数字同步整流控制方法。
该方法以CLLLC拓扑的脉冲频率调制(PFM)控制模式为基础,通过对不同工作频率模态的分析,总结推导同步开关管与主动管驱动时间的关系。
在宽电压的调制频率范围内,分别通过分析计算和线性函数分段拟合的方法得到同步管驱动信号的延迟开通和提前关断时间。
相较于其他同步整流控制,此方法利用纯数字控制实现,可应用于母线电压变化范围宽的大功率场合,且适用于双向变换器,避免了模拟控制芯片对母线电压变化敏感的缺点,控制方法简单且易于实现,成本更低,设计更简单。
最后,搭建了仿真平台和实验样机对所提出的方法进行验证。
仿真和实验的结果表明,该策略可以使系统效率最大提升3%左右,且能极大降低开关管温度。
关键词:车载充电器双向CLLLC变换器脉冲频率调制(PFM)数字同步整流多线性拟合中图分类号:TM46Digital Control Method of Wide-Range CLLLC BidirectionalSynchronous RectificationLiao Jiarui1 Hang Lijun1 Dan Zhimin2 He Yuanbin1 Gao Jinfeng2(1. Regional Energy Internet Technology Zhejiang Engineering LaboratoryHangzhou Dianzi University Hangzhou 310018 China2. Contemporary Amperex Technology Co. Ltd Ningde 352000 China)Abstract In order to solve the problems of low efficiency and high temperature of the switches under a wide range of working conditions of the bidirectional CLLLC resonant converter, this paper proposes a digital synchronous rectification controller for the rectifier on the secondary side of the high frequency transformer. Based on the pulse frequency modulation (PFM) mode of the CLLLC circuit, the operating mode of different frequencies is analyzed, and the relationship between the driving signal of the synchronous switch and the driving signal of the active device on the primary side of the transformer is obtained. In a wide modulation frequency range, the delayed turn-on time and lead turn-off time of the driving signal for the synchronous devices is obtained respectively by calculation and piecewise linear function fitting methods. Compared with other synchronous rectification control, this method is realized by pure digital control, which can be applied to high-power applications with a wide range of bus voltage variation. Furthermore, this method is suitable for bidirectional converters.and avoids the shortcoming that the analog control chip is sensitive to bus voltage changes. Meanwhile,国家自然科学基金资助项目(51777049, 51707051)。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Abstract—This work presents a method to generate a multi- scroll chaotic attractor by switched fractional system. Based on two piecewise-liear oliear fuctios, sub-models are constructed with the system order less than one. The switched system can demonstrate n-scroll chaotic attractors if its parameters ad switchig rule are suitably chose. By analyzing the lyapunov exponent and the stability of the system, It’s illustrated that chaotic attractors can be obtained with system orders as low as 0.9. Finally, Numerical examples are provided to verify the effectiveness of the proposed scheme.
I. INTRODUCTION RACTIONAL calculus is a mathematical topic with more than 300 years old history, but its application to physics and engineering have been attracted lots of attention only in recent years. It has been found that many systems can be described by fractional differential equations. For example, dielectric-polarization [1], electrode-electrolyte polarization1 [2], electromagnetic waves [3], and finance [4] have been known to display fractional order dynamics. There are many fractional order systems can exhibit chaos with proper parameters, such as the fractional order Duffing system [5], the fractional order Chua system [6] and the fractional order Lorenz system [7]. Recently, exploiting chaotic dynamics in high-tech and industrial engineering applications has attracted more and more interest, in which much attention has been focused on effectively creating chaos. In 1986, Chua found the Chua’s double-scrolls circuit [8-10], by adding breakpoints in the PWL characteristic function of the Chua’s circuit, more and more n-scroll chaotic attractors have been presented. In 2001, Tang et al. proposed a smooth sine-function approach for creating n-scroll chaotic attractor [11,12], with a systematical circuit realization that can physically produce up to as many
Manuscript received MAY 8, 2010.Research is partially supported by National Natural Science Foundation of China (60904050), and China Postdoctoral Science Foundation Funded Project (20090450997).
Mao Wang is with the Space Control and Inertial Technology Research Center, Harbin Institute of TechnologyHarbin 150001, Heilongjiang Province, PR China. E-mail:wangmao0451@sina.com.
Guanghui Sun is with the Space Control and Inertial Technology Research Center, Harbin Institute of TechnologyHarbin 150001, Heilongjiang Province, PR China. E-mail:guanghuisun@hit.edu.cn.
Lilian Huang is with College of Information and Communication Engineering, Harbin Engineering University. Harbin 150001, Heilongjiang Province, PR China. E-mail: lilian_huang@163.com.
as ten scrolls visible on the oscilloscope. Nowadays, generating multi-scroll chaotic attractors is no longer a very difficult task. In this paper, we introduce two piecewise-linear in our fractional sub-models. With the proper parameters and switching rule, the multi-scroll fractional chaotic attractor can present with the system order less than 0.9. The rest of this paper is organized as follows. Section 2 summarizes the basic concepts in fractional calculus and fractional differential equations. The system description and dynamical analysis are presented in Section 3. The numerical simulation and parameter analysis can be found in section 4. Finally, some conclusions are given in Section 5.
II. . BASIC CONCEPTS FOR FRACTIONAL CALCULUS
A. Definition Fractional calculus is a generalization of integration and differentiation to non-integer order fundamental operator. Some of the existing definitions are described [13]. The Riemann-Liouvill definition is the simplest one, which is shown as follows:
11d()()()d()ntrtnrnfDftdnrttDDWWW *³ (1)
where1nrn, ()*x is the Gamma function. It’s
unpractical that the R-L definition requires the knowledge of the non-integer order derivatives of the function at t=0. But the problem does not exist in the Caputo definition of the fractional derivative. The Caputo definition of derivative, which is sometimes called smooth fractional derivative, is described as:
()101(),1d()()()dd(),dnt
n
nn
fdnn
ftnt
tftnt
DD
D
WWD
DW
D
°
*°
®
° °¯
³ (2)
The Laplace transform of the Caputo fractional derivative is: ^`11()0d()()(0)dnkk
k
ftLsLftsf
t
DDD
D
½
®¾
¯¿
¦ (3)
where 1nnNDd. It is clear that only integer order derivatives of function f appear in the Laplace transform of the Caputo fractional derivative. For zero initial conditions,