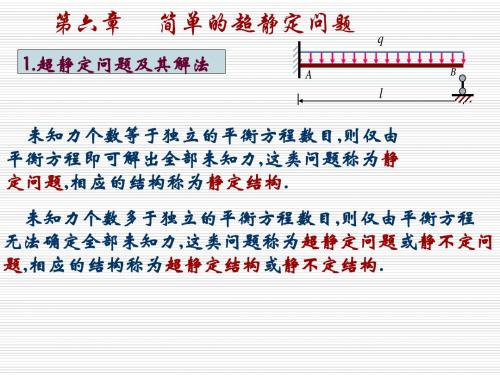
静定问题及超静定问题的异同
拉伸、压缩超静定问题

定结构的变形受到部分或全部约束, 温度变化时,
在图中, AB杆代表蒸汽锅炉与原动机间的管道。
与锅炉和原动机相比, 管道刚度很小, 故可把A, B两端简化成固定端。
固定于枕木或基础上的钢轨也类似于这种情况。
当管道中通过高压蒸汽, 或因季节变化引起钢轨温度变化时, 就相当于上述两端固定杆的温度发生了变化。
因为固定端限制杆
件的膨胀或收缩, 所以
势必有约反力F R A和
F R B作用于两端。
这将
引起杆件内的应力, 这
种应力称为热应力或
温度应力。
必须再补充一个变形协调方
这就是补充的变形协调方程。
第三章力系的平衡静定与超静定的概念
FCy
FE
FE=250N,
[CE]
整体]
F
q FQ
Fix=0, FAx=0
A
FAx
B
C
FAy 1 1
2
2
MA=0, –F·1+FB·2–FQ·4–M+FE·8=0
FB
ME
D 2m FE
FQ=4· FB=1500N q Fiy=0, FAy+FB+FE–F–FQ=0
FAy=–250N
例4-15:三根自重不计的杆组成构件如图示,巳知:F=600N,
得: FAx= –400N,
Fiy=0, FAy–F =0
得:FAy= 1000N,
M F3 [BD]
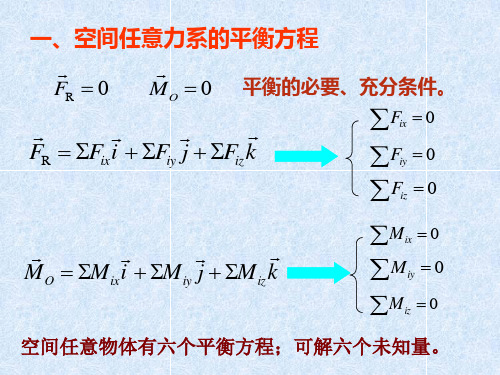
Miz 0
空间平行力系平衡方程
Fiz 0
Mix 0 Miy 0
例3-6:三轮平板车放光滑地面上,自重为:W,货重为F, 已知:F=10kN,W=8kN,试求各轮约束力的值。
解:这是空间平行力系。
z
Mix =0,
(200–80)W–200·FA =0; FA=4.8kN,
Miy =0,
y
FC
FAx= –2.8kN。
如校核方程: MCi=0, 应满足。
例3-9:图示雨蓬结构,因雨蓬对称结构可简化为平面结构,自
重不计,已知有力F作用,试求三根支撑杆的约束力。
解: 试用三力矩方程
B
MA 0,
M C 0,
2F1 5F 0, 1m
5F F1 2
1m
F2 4F 0 A
C 1m
3
M F3 2
0 32 42
FAx
B
3m
FAy
MD
6-简单超静定问题
FN 1l FN 3l cos EA cos EA FN 1 FN 3 cos 2
5、求解方程组得
FN 1 FN 2
F cos 2 1 2 cos 3
FN 3
F 1 2 cos 3
目 录
二、装配应力
构件的加工误差是难以避免的。对静定结构,加工误 差只是引起结构几何形状的微小变化,而不会在构件内引 起应力。但对静不定结构,加工误差就要在构件内引起应 力。这种由于装配而引起的应力称为装配应力。 装配应力是结构构件在载荷作用之前已具有的应力, 因而是一种初应力。
超静定结构中才有温度应力。
目 录
解题思路: 平衡方程:RA = RB 变形几何关系: 物理关系:
(t 时)
lT lF
lT l t
RB L
RB l lF EA
EA Lt
补充方程:
联立求解: RA RB EAt
EAt t Et A
目 录
一静定问题及超静定问题三基本静定系或相当系统是一个静定结构该结构上作用有荷载和多余约束力61超静定问题及其解法61超静定问题及其解法二多余约束及多余约束力在静定结构的基础上增加的约束
第六章
简单的超静定问题
§6–1 概述
§6–2 §6–3 §6–4 拉压超静定问题 扭转超静定问题 简单超静定梁
目的与要求:
M
max
WZ
32 M
d
max 3
76.4MPa
目 录
例题
结构如图示,设梁AB和CD的弯曲刚度EIz相同. 拉杆BC的拉压刚度EA为已知,求拉杆BC的轴力.
a
C
将杆CB移除,则AB,CD均为静定结构, 杆CB的未知轴力FN作用在AB,CD梁上。为1 D 次超静定。
超静定问题
l >
B端必接触
C
40kN 1.2m
静力平衡方程
RA RB 100kN
B
变形协调条件为 l
RB
RA
A
60kN 2.4m 1.2m
轴 力 图
15kN
85kN
⊕ 25kN
C
40kN 1.2m
B
RA 103 1.2 ( RA 60) 103 2.4 RB 103 1.2 l 9 6 9 6 9 6 210 10 600 10 210 10 600 10 210 10 300 10
3
FC
A
FC
C
L
2
L
B
2
P
例题 6.10
当系统的温度升高时,下列结构中的____不会 A 产生温度应力.
A
B
C
D
例题 6.11
图示静不定梁承受集中力F和集中力偶Me作用, 梁的两端铰支,中间截面C处有弹簧支座.在下列 关于该梁的多余约束力与变形协调条件的讨论 中,___是错误的. C
RB
RA 85kN
RB 15kN
三、扭转超静定问题 扭转变形计算公式
Tl GI p
T ( x) dx GI p l
例3.两端固定的圆截面等直杆AB,在截面
C受外力偶矩m作用,求杆两端的支座反力
偶矩。
m
A C B
a
b
解:
A
m
ɑ
mA
C
B
b
m
静力平衡方程为: m A mB m 变形协调条件为:
5 ql 8
B
L
q
静定超静定判断及计算

目的和意义
目的
理解静定与超静定的概念,掌握判断方法,能够进行相应的计算。
意义
在实际工程中,正确判断结构和系统的静定或超静定状态对于确保结构安全、节约材料和降低成本具有重要意义。
02
静定与超静定的基本概念
静定结构的定义
静定结构
在任何外界影响下,其平衡位置都是稳定的 ,且在受到微小扰动后能自动恢复到原来的 平衡状态。
内力计算的方法
静定结构的内力计算通常采用截面法或节点法进行。截面法是通过 截取结构的一部分进行分析,节点法则是对结构的节点进行受力分 析。
内力的表示方法
内力可以用实线和虚线表示,实线表示实际受力方向,虚线表示实际 受力反方向。
静定结构的位移计算
1
位移计算的意义
在结构分析中,位移是一个重要的参数 。通过计算位移,可以了解结构的变形 情况,从而评估结构的稳定性和安全性 。
本文的研究成果已被广泛应用于建筑、机械、航空航天等工程领 域,解决了众多实际工程问题,取得了显著的经济和社会效益。
对未来研究的展望
深入研究复杂结构体系
随着科技的发展,复杂结构体系在工程中越来越常见,未 来研究可进一步探讨复杂结构体系的静定与超静定问题, 提高工程结构的稳定性和安全性。
引入先进计算技术
计算公式
自由度数 = 刚片数 - 约束数。
判断标准
若自由度数等于0,则结构为静定;若自由度数不等于0,则结 构为超静定。
几何法判断
定义
几何法判断是指通过分析结构的几何形状来判断结构是否为静定或超静定的一种方法。
判断标准
若结构的几何形状满足静定结构的条件(即所有刚片都是相互平行的),则结构为静定;否则为超静 定。
01
4.3第4-3章物体系的平衡 静定和超静定问题
M A 0
2m 1m 1m
练习 求CE杆的内力。
P=qa
D
E
0.5a
q a
A
B
C
E 30° q
D a
q
a
1.5a
A
q
FCE q
FAx
A
FDx D FDy
C
FAy
FCB
C
B FBC
B
练习 求A、E的反力。
q
FCD
FBx B
C
G
FBy
q MA
FAx
A
B
FAy
FCD C
FEx E FEy
G 30°
q
解得: FAx P, FAy 1.5P, FBx P
代入(3)式解得: FCx P
FBy
B
P
P FBx
B
FBx FBy
FAy
A
FAx
FCy
C
FCx
FBy FCy 0.5P, FCx P (3)取CD杆为研究对象
P
P
B
C
aa a a
2a
2a
A
D
Fx 0, FDx FCx 0
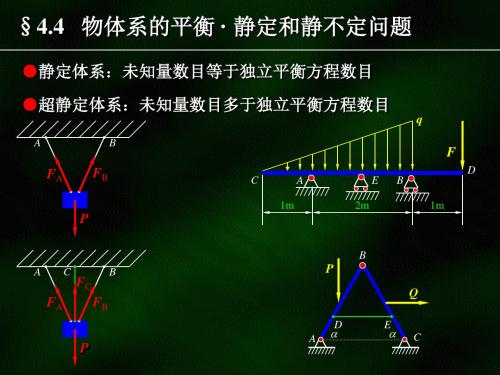
§4.4 物体系的平衡 ·静定和静不定问题
●静定体系:未知量数目等于独立平衡方程数目
●超静定体系:未知量数目多于独立平衡方程数目
q
A
FA
B
FB
C
A
EB
F
D
1m
2m
1m
P
AC
B
FC
FA
FB
P
B
P
Q
D A
E C
请从内力求解的角度阐述静定结构和超静定结构的区别

请从内力求解的角度阐述静定结构和超静定结构的区别
从内力求解的角度,静定结构和超静定结构的区别主要体现在内力的计算和平衡条件的满足上。
静定结构是指结构中的未知量(反力或内力)数量等于平衡方程的数量,可以通过静力学方法求解内力。
对于静定结构,我们可以通过平衡方程来求解反力,再根据结构的几何性质和约束条件来计算结构元件的内力。
静定结构的优点是计算简单,结果可靠,适用于形状简单,受力单一的结构。
而超静定结构是指结构中的未知量(反力或内力)数量多于平衡方程的数量,无法直接使用静力学方法求解内力。
超静定结构的计算需要引入附加的条件,如位移兼容条件、应力兼容条件或变形兼容条件等,来降低未知量的数量,从而求解内力。
超静定结构的优点是可以通过增加约束来提高结构的稳定性和承载能力,使得结构更加安全可靠。
缺点是计算相对复杂,对结构的约束条件要求较高。
总的来说,静定结构和超静定结构在内力求解的角度上的区别主要体现在未知量的数量和平衡条件的满足。
静定结构的未知量和平衡方程数量相等,可以直接使用静力学方法求解内力;而超静定结构的未知量数量多于平衡方程的数量,需要引入附加条件来求解内力。
超静定问题——精选推荐

西南交通大学应用力学与工程系材料力学教研室第八章简单的超静定问题§8-1 概述静定结构: 仅靠静力平衡方程就可以求出结构的全部未知的约束反力或内力FAB2A F1BααC平面任意力系:3个平衡方程平面共点力系:2个平衡方程独立平衡方程数:超静定结构(静不定结构): 仅凭静力学平衡方程不能求解全部未知内力或反力的结构。
超静定结构的未知力的数目多于独立的平衡方程的数目;两者的差值称为超静定的次数。
BD C A 132FααF F CF B F A BC ABCADA FααF N1y xF N3F N2BD C A 132FααF F CF B F A BC AA FααF N1y xF N3F N2•习惯上把维持物体平衡并非必需的约束称为多余约束,相应的约束反力称为多余未知力。
•超静定的次数就等于多余约束或多余未知力的数目。
•注意:从提高结构的强度和刚度的角度来说,多余约束往往是必需的,并不是多余的。
超静定的求解:根据静力学平衡条件确定结构的超静定次数,列出独立的平衡方程;然后根据几何、物理关系列出需要的补充方程;则可求解超静定问题。
F F CF B F A BC A•补充方程的数目=多余未知力的数目=多余约束数。
•根据变形几何相容条件,建立变形几何相容方程,结合物理关系(胡克定律),则可列出需要的力的补充方程。
•补充方程的获得,体现了超静定问题的求解技巧与关键。
此处我们将以轴向拉压、扭转、弯曲的超静定问题进行说明。
BD C A 132FααF F CF B F A BC AA FααF N1yxF N3F N2§8.2 拉压超静定问题1拉压超静定问题解法例两端固定的等直杆AB ,在C 处承受轴向力F 如图,杆的拉压刚度为EA ,求杆的支反力.解:一次超静定问题=−+F F F B A F BA F AB ablFC (1) 由节点A 的平衡条件列出杆轴线方向的平衡方程(2)变形:补充方程(变形协调条件)可选取固定端B 为多余约束,予以解除,在该处的施加对应的约束反力F B ,得到一个作用有原荷载和多余未知力的静定结构--称为原超静定结构的基本静定系或相当系统注意原超静定结构的 B 端约束情况,相当系统要保持和原结构相等,则相当系统在B 点的位移为零。