平面桁架利用卡氏定理求位移
结构力学5平面桁架讲解课件

桁架在动力荷载作用下的响应
瞬态响应
当桁架受到突然施加的动荷载 时,它会表现出瞬态响应。这 种响应通常包括一个短暂的过 渡过程,随后达到一个稳定的 振动状态。
频域响应
在周期性动荷载作用下,桁架 会表现出频域响应。通过频域 分析,可以研究桁架在不同频 率下的振动行为,并确定其振 幅和相位响应。
阻尼效应
高效的经济性
平面桁架能以较少的材料 用量承受较大的荷载,具 有较高的经济性。
平面桁架的应用场景
桥梁工程
在桥梁工程中,平面桁架常被用 作桥面板的支撑结构,能提供稳
定的支撑和承载能力。
建筑工程
在建筑工程中,平面桁架常被用于 楼层和屋盖的承重结构,以及建筑 物的支撑体系。
机械工程
平面桁架也被广泛应用于机械工程 领域,如起重机的梁架、设备的支 架等,其优良的受力性能使其在这 些场景中发挥重要作用。
桁架内力计算:轴力、剪力与弯矩
轴力计算
轴力是杆件沿轴线方向的拉力或压力。通过截面法可以得到杆件的轴力分布情况。根据杆 件的轴力和截面积,可以进一步计算杆件的应力状态,以评估其承载能力。
剪力计算
剪力是杆件横截面上的切向力。通过截面法可以得到杆件的剪力分布情况。剪力的大小和 方向决定了杆件的剪切变形和剪切应力,对于桁架的剪切稳定性分析至关重要。
05 平面桁架的数值模拟与实验验证
基于有限元的数值模拟方法
有限元法基本原理
有限元法将连续体离散为一系列小单元,通过节点连接,利用变分 原理建立节点力与位移的关系,进而求解整个结构的响应。
线性弹性有限元法
对于线弹性材料,采用线性弹性有限元法,通过刚度矩阵和载荷向 量的组装,求解节点位移。
非线性有限元法
02 平面桁架的静力学分析
第二节平面桁架问题
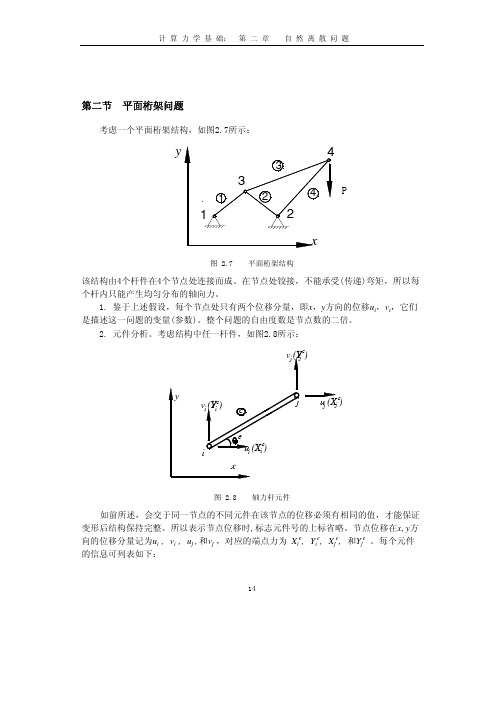
第二节 平面桁架问题考虑一个平面桁架结构,如图2.7所示:图 2.7 平面桁架结构该结构由4个杆件在4个节点处连接而成。
在节点处铰接,不能承受(传递)弯矩,所以每个杆内只能产生均匀分布的轴向力。
1. 鉴于上述假设,每个节点处只有两个位移分量,即x,y方向的位移u i,v i,它们1415元件号 节点号 节点坐标 弹性模量 横截面积 e i , j ( x i , y i );(x j , y j ) E e A e杆件的长度可由下式计算()()L x y x x y y e eej i j i =+=−+−∆∆2222()()ij i j e x x y y tg −−=θ其中e θ是杆件的轴向与x 轴正方向的夹角。
对于图2.8所示的结构,每个元件的节点号如下所示:424433322311j i e杆件产生节点位移u i ,v i ,u j ,v j 后,杆的长度变化为(以受拉为正,受压为负) ))sin cos (sin cos (e i e i e j e j e v u v u L θθθθ+−+=∆ 在节点 j 处的端点轴向力为ee ee e e e e eee jL L LA E L L A E F ∆=∆=∆=κ 其中e ee eLA E =κ 该力在x , y 方向的分量就是X j e 和Y j e ,其表达式为:ee e e e j e j L F X θκθcos cos ∆== j e e e j e e i e e e i e e v u v u θθκθκθθκθκsin cos cos cos sin cos 22++−−=e e e e e j e j L F Y θκθsin sin ∆== j e e j e e e i e e i e e e v u v u θκθθκθκθθκ22sin cos sin sin sin cos ++−−=由杆件本身的平衡得到 F i e = -F j e 即(2.11)(2.14a)(2.12)(2.14b)(2.13)16j eeej eei eeei eee je i v u v u X X θθκθκθθκθκsin cos cos cos sin cos 22−−+=−=j eej eeei eei eeeej e i v u v u Y Y θκθθκθκθθκ22sin cos sin sin sin cos −−+=−=把以上4式合并起来,写成矩阵形式如下⎪⎪⎭⎪⎪⎬⎫⎪⎪⎩⎪⎪⎨⎧⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡−−−−−−−−=⎪⎪⎭⎪⎪⎬⎫⎪⎪⎩⎪⎪⎨⎧j j i i e ee ee e e e e ee ee e e ee e e e e ee e e e j e j e i e i v u v u Y X Y X θθθθθθθθθθθθθθθθθθθθθθθθκ22222222sin cos sin sin cos sin cos sin cos cos sin cos sin cos sin sin cos sin cos sin cos cos sin cos 上式写成分块形式为F F k k k k d d i ej e ii eijejie jj e i j ⎧⎨⎪⎩⎪⎫⎬⎪⎭⎪=⎡⎣⎢⎢⎤⎦⎥⎥⎧⎨⎩⎫⎬⎭上式中各子矩阵,各子向量的意义是很明确的。
平面桁架位移法求解程序设计修正版
目录摘要 ............................................................................ - 3 -第一章题目的意义...................................................... - 4 -第二章理论分析......................................................... - 4 -2.1位移法的基本概念.. (4)2.2平面桁架分析的基本问题 (7)第三章程序设计框图..................................................- 12 -第四章程序代码........................................................- 13 -4.1计算平面桁架位移法的程序代码 .. (13)第五章应用..............................................................- 16 -5.1例一 .. (16)5.2例二 (19)第六章结论······························································- 22 -参考文献 ·····································································- 22 -平面桁架位移法计算的MAPLE程序设计摘要本文利用位移法编写MAPLE程序来计算平面桁架各节点位移、各杆的轴力。
《结构力学》第五章静定平面桁架
《结构力学》第五章静定平面桁架《结构力学》第五章讲述了静定平面桁架的内容。
静定平面桁架是指在平面内所有节点的约束力和外力之间可以通过力平衡方程求解出来的桁架结构。
本章内容主要包括静定平面桁架的基本概念和原理,以及常见的静定平面桁架的求解方法。
在静定平面桁架中,基本概念和原理非常重要。
首先,了解节点的约束力和外力之间的平衡关系非常重要。
通过平衡方程可以解决约束力和外力之间的关系。
其次,了解节点的自由度也是关键,自由度指节点上的约束力的个数。
在静态平面桁架中,节点的自由度为2,因为节点上只有两个方向的约束力。
然后,了解节点的外部力和内部力之间的关系也是很关键的,通过平衡方程可以解决这些关系。
此外,了解支撑条件、桁架的刚度和材料的性质也是非常重要的。
为了求解静定平面桁架,可以使用力法、位移法或者变形能法。
力法是最常用的一种求解方法,其基本思想是通过平衡条件和节点自由度来解决节点的约束力和外力之间的关系。
具体来说,可以先通过平衡方程得到节点处的约束力之和,然后通过平衡方程再次求解每个节点的约束力。
位移法是通过求解位移来求解约束力和外力之间的关系。
其基本思想是通过平衡方程求解节点的约束力和位移之间的关系,然后通过位移和刚度来求解节点的约束力。
位移法的求解过程比较繁琐,但是可以在复杂情况下准确求解静定平面桁架。
变形能法是一种通过统计力学和能量原理来求解约束力和外力之间的关系的方法。
通过求解系统的总能量和变形能量的变化,可以求解节点的约束力。
变形能法的求解过程相对简单,但是需要对系统的能量进行合理的选择。
在应用静定平面桁架时,需要考虑一些实际问题。
首先,需要考虑桁架的几何形状和荷载情况。
几何形状和荷载情况对桁架的受力和变形有很大影响,因此需要对这些进行准确的描述和分析。
其次,需要考虑桁架的材料性质和刚度。
不同材料和刚度会对桁架的受力和变形产生不同影响。
最后,需要注意桁架的稳定性和安全性。
在设计和使用桁架时,需要遵循一些安全性要求,以确保桁架的结构稳定和使用安全。
卡氏第二定理
F3
F1
3 1
1 , 2 , , i ,
结构的变形能
11 1 V ε W 2 F 1 δ 1 2 F 2 δ 2 2 F 3 δ 3
只给 Fi 一个增量 Fi .
引起所有力的作用点沿力方向的位
移增量为 Δ1,δ Δ2,δ Δ3,δ
在作用Fi 的过程中, Fi 完成 F1
的功为
1 2
ΔFi
氏定理)(Castigliano’s Theorem)
说明 (Directions):
(1)卡氏第二定理只适用于线性弹性体( Applying only to linearly elastic bodies)
δi
Vε Fi
(2)Fi 为广义力(generalized force) i为相应的位移
(displacement corresponding to force Fi )
一个力
一个力偶
一对力
一对力偶
一个线位移
一个角位移
相对线位移 相对角位移
(3)卡氏第二定理的应用 ( Application of castigliano’s second theorem ) (a) 轴向拉,压(Axial tension and compression)
δ i V F ε i F i F N 2 2 ( E x )x d A F E N (x )A F N F ( ix )d x
Δδi
原有的所有力完成的功为
2
F2
F3
3 1
F 1 Δ 1 F 2 δ Δ 2 δ F iΔ i δ
结构应变能的增量为
Δ ε 1 2 V Δ iΔ i F F δ 1 Δ 1 F δ 2 Δ 2 δ F iΔ i δ
材料力学常用基本公式
材料力学常用基本公式 Prepared on 24 November 20201.外力偶矩计算公式(P功率,n转速)2.弯矩、剪力和荷载集度之间的关系式3.轴向拉压杆横截面上正应力的计算公式(杆件横截面轴力F N,横截面面积A,拉应力为正)4.轴向拉压杆斜截面上的正应力与切应力计算公式(夹角a 从x轴正方向逆时针转至外法线的方位角为正)5.纵向变形和横向变形(拉伸前试样标距l,拉伸后试样标距l1;拉伸前试样直径d,拉伸后试样直径d1)6.7.纵向线应变和横向线应变8.9.泊松比10.胡克定律11.受多个力作用的杆件纵向变形计算公式12.承受轴向分布力或变截面的杆件,纵向变形计算公式13.轴向拉压杆的强度计算公式14.许用应力,脆性材料,塑性材料15.延伸率16.截面收缩率17.剪切胡克定律(切变模量G,切应变g )18.拉压弹性模量E、泊松比和切变模量G之间关系式19.圆截面对圆心的极惯性矩(a)实心圆20.(b)空心圆21.圆轴扭转时横截面上任一点切应力计算公式(扭矩T,所求点到圆心距离r)22.圆截面周边各点处最大切应力计算公式23.扭转截面系数,(a)实心圆(b)空心圆24.薄壁圆管(壁厚δ≤ R/10 ,R为圆管的平均半径)扭转切应力计算公式25.圆轴扭转角与扭矩T、杆长l、扭转刚度GH p的关系式26.同一材料制成的圆轴各段内的扭矩不同或各段的直径不同(如阶梯轴)时或27.等直圆轴强度条件28.塑性材料;脆性材料29.扭转圆轴的刚度条件或30.受内压圆筒形薄壁容器横截面和纵截面上的应力计算公式,31.平面应力状态下斜截面应力的一般公式,32.平面应力状态的三个主应力,,33.主平面方位的计算公式34.面内最大切应力35.受扭圆轴表面某点的三个主应力,,36.三向应力状态最大与最小正应力 ,37.三向应力状态最大切应力38.广义胡克定律39.40.四种强度理论的相当应力41.一种常见的应力状态的强度条件,42.组合图形的形心坐标计算公式,43.任意截面图形对一点的极惯性矩与以该点为原点的任意两正交坐标轴的惯性矩之和的关系式44.截面图形对轴z和轴y的惯性半径,45.平行移轴公式(形心轴z c与平行轴z1的距离为a,图形面积为A)46.纯弯曲梁的正应力计算公式47.横力弯曲最大正应力计算公式48.矩形、圆形、空心圆形的弯曲截面系数,,49.几种常见截面的最大弯曲切应力计算公式(为中性轴一侧的横截面对中性轴z的静矩,b为横截面在中性轴处的宽度)50.矩形截面梁最大弯曲切应力发生在中性轴处51.工字形截面梁腹板上的弯曲切应力近似公式52.轧制工字钢梁最大弯曲切应力计算公式53.圆形截面梁最大弯曲切应力发生在中性轴处54.圆环形薄壁截面梁最大弯曲切应力发生在中性轴处55.弯曲正应力强度条件56.几种常见截面梁的弯曲切应力强度条件57.弯曲梁危险点上既有正应力σ又有切应力τ作用时的强度条件或,58.梁的挠曲线近似微分方程59.梁的转角方程60.梁的挠曲线方程61.轴向荷载与横向均布荷载联合作用时杆件截面底部边缘和顶部边缘处的正应力计算公式62.偏心拉伸(压缩)63.弯扭组合变形时圆截面杆按第三和第四强度理论建立的强度条件表达式,64.圆截面杆横截面上有两个弯矩和同时作用时,合成弯矩为65.圆截面杆横截面上有两个弯矩和同时作用时强度计算公式66.67.弯拉扭或弯压扭组合作用时强度计算公式68.剪切实用计算的强度条件69.挤压实用计算的强度条件70.等截面细长压杆在四种杆端约束情况下的临界力计算公式71.压杆的约束条件:(a)两端铰支μ=l72.(b)一端固定、一端自由μ=273.(c)一端固定、一端铰支μ=(d)两端固定μ=74.压杆的长细比或柔度计算公式,75.细长压杆临界应力的欧拉公式76.欧拉公式的适用范围77.压杆稳定性计算的安全系数法78.压杆稳定性计算的折减系数法79.关系需查表求得3 截面的几何参数4 应力和应变5 应力状态分析6 内力和内力图7 强度计算8 刚度校核9 压杆稳定性校核10 动荷载11 能量法和简单超静定问题材料力学公式汇总一、应力与强度条件1、 拉压 []σσ≤=maxmax AN2、 剪切 []ττ≤=AQmax 挤压 []挤压挤压挤压σσ≤=AP3、 圆轴扭转 []ττ≤=W tTmax 4、平面弯曲 ①[]σσ≤=maxz max W M②[]max t max t max max σσ≤=y I M zt③[]ττ≤⋅=bI S Q z *max z max max 5、斜弯曲 []σσ≤+=maxyyz z max W M W M6、拉(压)弯组合 []σσ≤+=maxmax zW M A N注意:“5”与“6”两式仅供参考 7、圆轴弯扭组合:①第三强度理论 []στσσ≤+=+=z2n2w 2n2wr34W M M②第四强度理论[]στσσ≤+=+=z2n2w 2n2wr475.03W M M二、变形及刚度条件1、 拉压 ∑⎰===∆LEAxx N EALN EANL L d )(ii2、扭转 ()⎰=∑==Φpp i i p GI dxx T GI LT GI TL πφ0180⋅=Φ=p GI T L(m / ) 3、弯曲(1)积分法:)()(''x M x EIy = C x x M x EI x EIy +==⎰d )()()('θ D Cx x x x M x EIy ++=⎰⎰d ]d )([)((2)叠加法:()21,P P f …=()()21P f P f ++…, ()21,P P θ=()()++21P P θθ…(3)基本变形表(注意:以下各公式均指绝对值,使用时要根据具体情况赋予正负号)EIMLB3=θ,EI MLA 6=θ EI PL AB 162==θθ EIqL A B 243==θθ(4)弹性变形能(注:以下只给出弯曲构件的变形能,并忽略剪力影响,其他变形与此相似,不予写出)EIL M U 22==ii i EI L M 22∑=()⎰EIdx x M 22 (5)卡氏第二定理(注:只给出线性弹性弯曲梁的公式) 三、应力状态与强度理论 1、 二向应力状态斜截面应力2、 二向应力状态极值正应力及所在截面方位角 3、 二向应力状态的极值剪应力注:极值正应力所在截面与极值剪应力所在截面夹角为450 4、 三向应力状态的主应力:321σσσ≥≥最大剪应力:231max σστ-=5、二向应力状态的广义胡克定律(1)、表达形式之一(用应力表示应变) (2)、表达形式之二(用应变表示应力) 6、三向应力状态的广义胡克定律 7、强度理论(1)[]111σσσ≤=r ()3212σσμσσ+-=r []σ≤ []bb n σσ= (2)[]σσσσ≤-=313r ()()()[]213232221421σσσσσσσ-+-+-=r []σ≤ []s sn σσ=8、平面应力状态下的应变分析 (1)αγαεεεεεα2sin 22cos 22⎪⎪⎭⎫⎝⎛---++=xyyx y x+-=⎪⎭⎫ ⎝⎛-αεεγα2sin 22yx αγ2cos 2⎪⎪⎭⎫ ⎝⎛-xy (2)22min max 222⎪⎪⎭⎫⎝⎛+⎪⎪⎭⎫ ⎝⎛-±+=xy y x y x γεεεεεεyx xyεεγα-=02tg四、压杆稳定1、临界压力与临界应力公式(若把直杆分为三类)①细长受压杆 p λλ≥ ()2min 2cr L EI P μπ= 22cr λπσE= ②中长受压杆 s p λλλ≥≥ λσb a -=cr ③短粗受压杆 s λλ≤ “cr σ”=s σ 或 b σ2、关于柔度的几个公式 i Lμλ= p2p σπλE=ba s s σλ-=3、惯性半径公式AI i z= (圆截面 4d i z=,矩形截面12min b i =(b 为短边长度))五、动载荷(只给出冲击问题的有关公式) 能量方程 U V T ∆=∆+∆ 冲击系数 st d 211∆++=hK (自由落体冲击) st20d ∆=g v K (水平冲击)六、截面几何性质 1、惯性矩(以下只给出公式,不注明截面的形状)⎰=dA I P 2ρ=324d π()44132απ-D Dd =α 2、惯性矩平移轴公式。
位移计算的一般公式
位移计算的一般公式(一)位移计算的一般公式利用虚功原理求结构位移需要两个状态:实际位移状态和虚设力状态。
要求的位移是由给定的荷载、温度变化和材料胀缩、支座移动和制造误差等因素引起的,以此作为结构的实际位移状态;再虚设一个恰当的力状态,即在所求位移处沿所求位移方向加相应的单位荷载,让虚设力在实际位移上作功,利用虚功方程即可求得所求位移。
这种计算位移的方法称为单位荷载法。
利用单位荷载法,由虚功方程(1-3)可得平面杆件结构位移计算的一般公式(1-4) 式中:和、、——虚设单位荷载引起的支座反力和微段上的内力;和、、——实际位移状态中支座位移和微段上的变形。
公式(1-4)适合静定结构和超静定结构、弹性体系和非弹性体系在各种因素下产生的位移计算。
【注意】采用单位荷载法求结构位移,应注意以下几点:(1)每假设一个虚拟状态,只能求出一个未知位移;(2)所加的单位荷载应与所求位移相对应;(3)虚设单位荷载的指向可以任意假定,结果为正,说明所假设单位荷载方向与实际位移方向相同;结果为负,则说明与实际位移相反。
(二)荷载作用下的位移计算公式计算荷载作用下的位移时,式(1-4)中的应变、、0是由荷载引起的,可按下列顺序求出:荷载——内力——应力——应变下面列出在荷载作用下,静定结构的单位位移的具体计算步骤:(1)根据荷载情况,求出结构各截面的弯矩、剪力、轴力。
(2)根据内力,求出相应的弯曲、拉伸和剪切应变:(1-5a)(1-5b)(1-5c)式中:E和G分别为材料的弹性模量和剪切弹性模量:A和I分别是杆件截面的面积和惯性矩。
EI、GA、EA分别是杆件截面的抗弯、抗剪、抗拉刚度;是剪应力分布不均匀系数。
(3)将式(1-5)代入式(1-4),即得到在荷载作用下的位移计算公式(1-6)须指出:上式(1-6)只适用于线弹性平面杆系结构。
关于内力的正负号可规定如下:●轴力——以拉力为正;●剪力——使微段顺时针转动者为正;●弯矩——只规定乘积的正负号。
静不定问题分析思路与思考题
静不定度判断 二、平面刚架和曲杆
多余约束 3
多余约束 2
轴线为单闭合曲线的平面刚架或平 面曲杆、且仅在轴线平面内承受外力时, 面曲杆、且仅在轴线平面内承受外力时, 为 3 度内力静不定问题 度内力静不定问题
2. 多余反力的确定
∆m/ m' = ∑
FNi F Ni li Ei A i i =1
6
列表
a 2 2 +1 ∆m/ m' = F (2 + 2 2)FN + EA 2
∆m/ m' = 0
得:FN = −0.561F
3. 转角计算
FNi F Ni li θCD = Ei A i i =1
P
1
l1
α A
选取单位载荷状态: 选取单位载荷状态:
3
l3
l2
2
3
l3
l2
2
1
l1
α
A 1
1
l1
α
A 1
单位力加在基本系统上, 单位力加在基本系统上, 为什么? 为什么?
该单位载荷状态是否可用? 该单位载荷状态是否可用?
小结: 小结:
力法求解思路 解除多余约束 静不定 结 构 静定结构 基本系统 结构的应力、 结构的应力、位移 利用基本系统 静定分析 多余约束力 多余约束力 原有外载荷 相当系统
静不定度判断 二、平面刚架和曲杆
三度内力静不定
两度内力静不定
一度内力静不定
内力静定
几何可变
静不定度判断
第14讲_图乘法求静定刚架桁架组合结构的位移计算
P
P
P
A
D
B
(a)
4 4m
§ 6-6 图乘法-刚架、桁架、组合结构的位移计算
Structural Mechanics
0
P -8P 3
P
-8P 3
P
0
0
0
5P 6
-P
5P
6
0
0 3m
A 2P
(b) RA=3P/2
2P D
2P
2P B
NP 4×4m
RB=3P/2
0
0
-5 6
A2
3
RA=1/2
(c)
-4
ql/2
ql
l 4
K' Pi=1
3l 16
M 4图
3/4
1/4
(g)
4)采用两种方法图乘(b’)
、(g)
求梁l/4处截面的挠度
V K
'
。
V K'
1 EI
1 3
ql 2 32
l (3 3l ) 4 16
1 3l 3l 2 16 4
1 3
ql 2 2
2 3
ql 2 32
2 9ql2 3 128
1
B
1
1
1
Structural Mechanics
1/l
1/l
M 3图 C
返回
§ 6-6 图乘法-刚架、桁架、组合结构的位移计算
例7 试计算图(a)桁架的跨中D的挠度。已知:P=18kN,斜杆
的横截面积为A1,上下弦的横截面积为A2,A2 =2A1,且 EA1=200MN。
Structural Mechanics
1/l
卡 氏 定 理
V F11 F2 2 Fi i
如果把原有诸力看成第一组力,把 Fi 看作第二组力,根据互等
定理:
Fi i F11 F2 2 Fi i
所以:V Fi i
V Fi
i
Fi 0
V Fi
i
变形能对任一载荷Fi 的偏导数,等于Fi作用点沿Fi方向的位移
卡氏第二定理
材料力学
T (x) T (x)
dx
L GI P Fi
材料力学
推导过程使用了互等定理,所以只适用线弹性结构。
材料力学
横力弯曲:
i
V Fi
Fi
(
L
M 2(x) dx)
2EI
M (x) M (x) dx L EI Fi
桁架杆件受拉压:
V
n j 1
FN
2 j
L
j
2EAj
i
V Fi
n FN j Lj FN j j1 EAj Fi
轴受扭矩作用:
i
V Fi
材料力学
材料力学
F3
1
F2
F1
2 3
i
卡氏定理
V
W
1 2
F11
1 2
F2
2
1 2
F3
3
Fi
材料力学
ห้องสมุดไป่ตู้
若只给 Fi 以增量 ,其余不变,在Fi 作用下,原各力作用点将
产生位移1 , 2 ,, i ,
变形能的增加量:
V
1 2
Fi
i
F11 F2 2
Fi i
材料力学 材料力学
略去二阶小量,则:
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
平面桁架利用卡氏定理求位移-MAPLE程序设计学院:土木工程与建筑学院班级:工程力学1001指导老师:赵明波成员:20103804沈立20103808唐显鹏西南科技大学2013年5月20日目录摘要 (3)第1章题目的意义 (4)第2章理论分析 (4)1.卡式定理求位移基本概念 (4)2.平面桁架问题分析,求位移理论 (5)第3章程序设计框图 (6)第4章程序代码 (7)第5章应用 (11)1. 例1 (11)2. 例2 (13)3.例3 (15)第6章结论 (17)参考文献 (18)摘要本文在深入理解有限元位移法的基础上,利用MAPLE编程来编写平面桁架用卡氏定理求位移的通用程序。
该通用程序能够根据给定的桁架计算模型,通过MAPLE输入外加荷载和虚拟荷载,计算出平面桁架指定点的位移。
关键字:MAPLE 平面桁架位移计算程序设计第 1 章题目意义在现实生活中,平面桁架随处可见。
例如桥梁、屋架、电视塔和起重机架等,所以平面桁架的位移计算就显得特别重要。
我们利用MAPLE程序对任意平面桁架的位移问题分析计算,确定其是否能够继续工作。
第 2 章理论分析1.卡式定理求位移基本概念将结构的应变能表为荷载F,2F,3F.......n F的函数,则应变能对任一1荷载F的偏导数等于i F作用点沿i F方向的位移i ,这便是卡氏定理。
因为大量i实践表明:一般情况下桁架中主应力的主应力占总应力的80%以上,所以主应力的确定是桁架中应力的主要部分。
即是桁架的内力主要是轴力,所以附加弯矩的影响是次要的,所以在计算时一般只考虑杆件轴力。
所以对于平面桁架位移的求解方法即为先求出每根杆件的轴力,然后求出应变能,最后求出指定点位移。
2.平面桁架问题分析,求位移理论①假设平面桁架有N根杆件,先对杆件进行编号。
在指定点施加一个虚拟力SWU ,计算出在外加荷载和SWU 共同作用下杆件轴力1n F , 2n F ,3n F .. . . . . nn F ;得出杆件轴力矩阵PP=[1n F , 2n F , 3n F . . . . . . nn F ] 杆件长度矩阵=[1l , 2l , 3l . . . . . . n l ] 杆件刚度矩阵=[1A ,2A ,3A . . . . . . n A ]②因为杆件计算时只考虑轴力,所以杆件的应变能只有轴力作用,L F V ∆=21ε,又因为在弹性范围内EAFlL =∆,所以杆件的应变能的应变能公式EAl F V 22=ε。
于是平面桁架的总应变能公式:∑==nj jinj EA l F V 122ε 将所求得的数据,按对应下标带入公式中,即可得出应变能;③根据卡氏定理,位移公式 injn j j j nj i i F F EA l F F V ∂∂=∂∂=∑=1εδ, 将上面得出的应变能力表达式带入位移公式中,得出位移的表达式,最后按SWU=0最终求出指定点位移的具体数值。
第 3 章程序设计框图开始根据题目输入原始数据应用Function函数计算出位移向已知条件矩阵NP中添加虚拟荷载添加空白长度矩阵计算出系数矩阵和长度矩阵使用画图语句画出题目构件图形计算出外力矩阵(包括SWU)计算出杆件轴力矩阵(在外荷载和SWU下)矩阵计算出杆件总应变能简易画图语句第 4 章 程 序 代 码>restart:with(linalg):with(plots):printlevel:=0:interface(showassumed=0):>HT:=(XY,NE)->display(plot([seq([XY[i,1],XY[i,2]],i=1..rowdim(XY))],style=point,axes=none,color=blue,symbol=circle,symbolsize=30,thickness=2),plot([seq([[X Y[NE[i,1],1],XY[NE[i,1],2]],[XY[NE[i,2],1],XY[NE[i,2],2]]],i=1..rowdim(NE))],color=red,style=line,thickness=2),textplot([seq([XY[i,1],XY[i,2],i],i=1..rowdim(XY ))],color=blue),textplot([seq([XY[NE[i,1],1]*0.45+XY[NE[i,2],1]*0.55,XY[NE[i,1],2]/2+XY[NE[i,2],2]/2,i],i=1..rowdim(NE))],color=blue )):> Function:=proc(XY,NE,NC,NP,ZS) localpaint,ST,leng,k,i,j,xi,yi,xj,yj,cosa,sina,PPP,PP,FN,FN1,SN,RES: NP:=stackmatrix(NP,[ZS[1],ZS[2],DWL]); print(HT(subs(a=1,evalm(XY)),NE)); #画图 ST:=matrix(2*rowdim(XY),2*rowdim(XY),0): leng:=[seq(0,i=1..rowdim(NE))]; for k from 1 to rowdim(NE) do:应变能对SWU 偏微分后,取SWU=0,得到所求点位移i:=NE[k,1]: j:=NE[k,2]: xi:=XY[i,1]:yi:=XY[i,2]: xj:=XY[j,1]: yj:=XY[j,2]:leng[k]:=sqrt((xj-xi)**2+(yj-yi)**2);cosa:=(xi-xj)/leng[k]: sina:=(yi-yj)/leng[k]:ST[2*i-1,k]:=-cosa: ST[2*i,k]:=-sina:ST[2*j-1,k]:=+cosa: ST[2*j,k]:=+sina:od:for k from 1 to rowdim(NC) do: #ST矩阵施加外约束i:=NC[k,1]: j:=NC[k,2]:ST[2*i-2+j,rowdim(NE)+k]:=-1:od:PPP:=[seq(0,i=1..2*rowdim(XY))]:for k from 1 to rowdim(NP) do: #施加外力和DWLi:=NP[k,1]: j:=NP[k,2]:PPP[2*i-2+j]:=PPP[2*i-2+j]+NP[k,3]:od:PP:=linsolve(ST,PPP): #外力和DWL下的轴力矩阵FN:=subs(DWL=0,evalm(PP));#纯外力作用下的轴力矩阵FN1:=map(diff,PP,DWL);SN:=(1/2)*factor(add(PP[k]**2*leng[k]/NE[k,3]/NE[k,4],k=1..rowdim( NE)));RES:=matrix(rowdim(NE)+1,6,0): #构建结果矩阵RES[1,1]:=杆件:RES[1,2]:= 轴力F[N]:RES[1,3]: 轴力F[N,DWL]:RES[1,4]:=杆长:RES[1,5]:=刚度:RES[1,6]:=F[N]*F[N,DWL]*L/(EA):for i from 1 to rowdim(NE) do; #添加杆件号,轴力F[N],轴力F[N,DWL] ,杆长,刚度RES[i+1,1]:=cat(NE[i,1],"..",NE[i,2]);RES[i+1,2]:=FN[i];RES[i+1,3]:=FN1[i];RES[i+1,4]:=leng[i];RES[i+1,5]:=NE[i,3]*NE[i,4];RES[i+1,6]:=RES[i+1,2]*RES[i+1,3]*RES[i+1,4]/RES[i+1,5];od;print(RES);Delta=factor(subs(DWL=0,diff(SN,DWL)));Delta=factor(add(RES[s,6],s=2..rowdim(RES)));end proc:第 5 章应用例1.求出该图4节点在垂直方向上的位移其中在6,7,8节点处都受到垂直向下的外荷载F解答:1、输入原始数据>XY:=evalm(matrix([[0,0],[2,0],[4,0],[6,0],[8,0],[2,1],[6,1],[4,2 ]])):>NE:=matrix([[1,2,E,A],[2,3,E,A],[3,4,E,A],[4,5,E,A],[6,1,E,A],[6 ,2,E,A],[6,3,E,A],[8,3,E,A],[7,3,E,A],[7,4,E,A],[7,5,E,A],[8,6,E ,A],[8,7,E,A]]):> NC:=matrix([[1,1],[1,2],[5,2]]):> NP:=matrix([[6,2,-F],[8,2,-F],[7,2,-F]]):2、输入所求节点编号和方向> ZS:=[5,1]:3、画出简易图形4、计算出每根杆件的长度[],,,,,,,,,,,,22225152515555、数据带入源程序中,求出杆件在外荷载和SWU 共同作用下的轴力- - 3F DWL - - 3F DWL - - 3F DWL - - 3F DWL 325F 0125F -F 125F 0,,,,,,,,,,⎡⎣⎢⎢325F 5F 5F -DWL 32F 32F ,,,,,⎤⎦⎥⎥ 6、轴力带入源程序得出总应变能12 + + + 8DWL 248DWL F 74F 235F 25E A7、得到程序每步的结果矩阵⎡⎣⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎤⎦⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥杆件轴力FN轴力F,N DWL杆长刚度F N F ,N DWL L EA 1..2-3F -12E A 6F E A 2..3-3F -12E A 6F E A 3..4-3F -12E A 6F E A 4..5-3F-12E A 6F E A 6..1325F 05E A 06..2001E A 06..3125F 05E A 08..3-F 02E A 07..3125F 05E A 07..4001E A 07..5325F 05E A 08..65F 05E A 08..75F5E A0 8、应变能对SEL 微分得到所求点所求方向上的位移= ∆24FE A例2.如图所示,求2号节点垂直方向的位移其中在2号节点垂直方向受到向下的力F解答:1、输入原始数据> XY:=evalm(matrix([[0,0],[1,0],[1,1],[0,1]])):> NE:=matrix([[1,2,E,A],[2,3,E,A],[3,4,E,A],[4,2,E,A]]): > NC:=matrix([[1,1],[1,2],[4,1],[4,2]]):> NP:=matrix([[2,2,-F]]):2、输入所求节点编号和方向> ZS:=[2,2]:3、画出简易图形4、计算出每根杆件的长度[],,,11125、数据带入源程序中,求出杆件在外荷载和SWU 共同作用下的轴力,,,,,,, - F DW L 002()- + F DW L - F DW L 0- + F DW L - F DW L6、轴力带入源程序得出总应变能12()- + F DWL 2()+ 122E A7、得到程序每步的结果矩阵⎡⎣⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎤⎦⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥杆件轴力FN轴力F,N DWL杆长刚度F N F ,N DWL L EA 1..2F -11E A -F E A 2..3001E A 03..4001E A 04..2-2F22E A-22F E A 8、应变能对SEL 微分得到所求点所求方向上的位移= ∆-F ()+ 122E A例3.如图所示,求2号节点垂直方向的位移解答:1、输入原始数据>XY:=evalm(matrix([[0,0],[20,0],[40,0],[40,20],[20,40],[0,20],[20 ,20]])):>NE:=matrix([[1,2,E,A],[2,3,E,A],[3,4,E,A],[4,5,E,A],[5,6,E,A],[6 ,1,E,A],[1,7,E,A],[3,7,E,A],[5,7,E,A],[2,6,E,A],[2,4,E,A]]):> NC:=matrix([[1,1],[1,2],[3,2]]):> NP:=matrix([[2,2,-F],[4,2,-F]]):2、输入所求节点编号和方向> ZS:=[7,2]:3、画出简易图形4、计算出每根杆件的长度[],,,,,,,,,,20202020220220202202202022025、数据带入源程序中,求出杆件在外荷载和SWU 共同作用下的轴力⎡⎣⎢⎢⎤⎦⎥⎥,,,,,,,,,,,,,12120000-122-1220000-12-12 6、轴力带入源程序得出总应变能57() + 122()+ + + 11F 214F DWL 7DWL 220F 22E A7、得到程序每步的结果矩阵⎡⎣⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎤⎦⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥杆件轴力FN轴力F,N DWL杆长刚度F N F ,N DWL L EA 1..212F 1220E A 5F E A 2..312F 1220E A 5F E A 3..42F020E A 04..5122F 0202E A 05..6122F 0202E A 06..1F 020E A 01..7-122F -122202E A 102F E A 3..7-122F -122202E A 102F E A 5..7-F 020E A 02..6-122F 0202E A 02..4-122F 0202E A0 8、应变能对SEL 微分得到所求点所求方向上的位移= ∆10() + 122FE A第 6 章 结 论本次课程设计是利用卡氏定理对平面桁架的位移问题进行分析计算。