关节活动度训练全解
康复训练种类

1、定义:关节活动度训练是指运用多种康复训练的方法增加或维持关节活动范围,提高肢体运动能力;根据患者肌力情况分为主动、被动、主动辅助关节活动训练三种。
2、适应症:(1)患者不能主动活动,如昏迷、完全卧床等;为避免关节挛缩、肌肉萎缩、骨质疏松和心肺功能降低等并发症需进行被动训练;主动关节活动导致明显疼痛的患者也需进行被动活动。
(2)患者能够主动收缩肌肉,但因各种原因所致的关节粘连或肌张力增高而使关节活动受限,可进行主动训练;肌力较弱(低于 3 级)者采用主动-辅助关节活动度训练;有氧训练时,多次重复的主动或主动-辅助关节活动度训练可改善心肺功能。
(3)肌力3级或3级以上患者,但存在关节肌肉的挛缩粘连需进行主动关节活动训练。
3、禁忌症:各种原因所致关节不稳、骨折未愈合又未做内固定、骨关节肿瘤、全身情况极差、病情不稳定等。
连续被动关节活动(CPM)1、定义:是利用专用器械使关节进行持续较长时间的缓慢被动运动的一种训练方法。
训练前可根据患者情况预先设定关节活动范围、运动速度、及持续被动运动时间等指标,使关节在一定活动范围内进行缓慢被动运动,以防止关节粘连和挛缩。
2、适应症:四肢骨折,特别是关节内或干髓端骨折切开复位内固定术后;人工关节置换术后,韧带重建术后;创伤性关节炎、类风湿性关节炎滑膜切除术后,化脓性关节炎引流术后;关节挛缩、粘连松解术后,关节镜术后等。
3、禁忌症:连续被动运动如对正在愈合组织产生过度紧张时应慎用或推迟应用。
4、仪器设备:对不同关节进行连续被动运动训练,可选用各关节专用的连续被动运动训练器械。
训练器械是由活动关节的托架和控制运动的机械组成,包括针对下肢、上肢、甚至手指等外周关节的专门训练设备。
5、注意事项:(1)、术后伤口内如有引流管时,要注意运动时不要影响引流管;(2)、手术切口如与肢体长轴垂直时,早期不宜采用CPM 训练,以免影响伤口愈合;(3)、训练中如同时使用抗凝治疗,应适当减少训练时间,以免出现局部血肿;(4)、训练程序的设定应根据外科手术方式、患者反应及身体情况加以调整。
第二章 关节活动技术

• 4.与肌肉牵伸结合
• 五、关节活动范围测量 关节活动范围(range of motion,RoM)是指关节的远端 向着或离开近端运动,远端骨所达到的新位置与开始位置 之间的夹角,即远端骨所移动的度数(图2-6)。关节活动范 围测量即是测量远端骨所移动的度数,而不是两骨之间所 构成的夹角。
• (一) 测量所使用的仪器设备 • 1.通用量角器 由1个圆形或半圆形的刻度盘 和两条臂(分别称为固定臂和移动臂)构成,固定臂 与刻度盘相连接,不可移动,移动臂的一端与刻度 盘的中心相连接,可以移动。通用量角器主要用来 测量四肢关节(图2-7)。
第二节 上肢关节活动技术
• (一)解剖结构 • 1.喙锁关节 • 2.肩肱关节 • 3.肩胛胸壁关节 • 4.胸锁关节 • 5.肩锁关节 • 6.盂肱关节
•
• 基本动作为肩关节的前屈一后伸,内收一 外展,水平内收一外展,旋内一旋外。练习时 要求动作平稳,每个动作均要达到最大的活动 范围,如和上肢其他关节的活动结合起来练习, 应以肩部的动作为主。
• 2.被动活动
• (1) 腕掌及腕骨间关节 病人仰卧位或坐位,前臂旋前。 治疗者双手握住其手部,拇指放在手背,指向肘部,其余4 指放在掌部。双手同时将腕骨及掌骨向手掌方向运动,然 后还原。 • (2) 指间关节 病人仰卧位或坐位,治疗者一手固定其掌 部,一手活动其近端指间关节,也可以一手固定近端指骨, 一手活动中端指骨,或者固定中端指骨.活动远端指骨(图 2-34)。
• (三) 器械运动 • 改善肩部关节活动的常用器械有:肩轮、肋木、吊环、肩 墙梯、肩关节旋转器、体操棒等(图2-19~23)。
• 二、肘关节 • (一)解剖 • 1.构成 肘关节由肱骨远端与尺、桡骨近端构成(图2-24) 。 • 2.特点 为复合关节,上述3个关节被包裹在一个关节囊 内。肱尺关节、肱桡关节、桡尺关节。
3-1康复治疗技术—物理治疗

呼吸训练护理要点
内容
• 卧位的翻身训练
• 卧位到坐位的转换 • 坐位到立位的转换
训练护理要点
• 每次训练时仅给予最小辅助;并依次减少辅助量 • 向患者分步解释动作顺序及要求
体位转换训练
步行训练
训练准备
顺 序
步行基本动作训练
步行训练护理要点
医疗体操
医疗体操护理要点
易化技术(facilitation techniques)
关节松动技术
定义:牵伸是指拉长挛缩或短缩软组织的治疗方法 目的:改善或重新获得关节周围软组织的伸展性, 降低肌张力,增加或恢复关节的活动范围 牵伸方式 • 手法牵伸 • 机械装置被动牵伸 • 自我牵伸
软组织牵伸技术
注意事项 • 牵伸前评估
• 体位
• 牵伸力量的方向
• 避免过度牵伸
• 某些情况下牵伸应慎重
康复护理学
第三章
康复治疗技术 —物理治疗
物理治疗
• 运动疗法 • 其他物理因子疗法:如电疗法、光疗法等
作业治疗 言语康复 心理康复
康复工程
主要内容
概念:是运动在医学中的应用,是以运动学、生物力
学和神经发育学为基础,以改善躯体、生理、心理和
精神的功能障碍为主要目标,以作用力和反作用力为
主要因子的治疗方法。
平衡能力训练
呼吸训练
体位转换训练
步行训练
医疗体操
易化技术
概念: • (ROM)关节所能达到的活动范围
分类
• 主动关节活动度
• 被动关节活动度
(一)关节活动度训练
意义: • 运动功能恢复的前提和关键 • 恢复肌力、耐力等运动要素的基础 • 进行日常生活活动训练、职业训练、使用各种矫形
关节活动技术

因而安全、舒适
关节持续性被动活动
实验证明,CPM可以促进伤口的愈合和关节软骨的 修复和再生,加快关节液的分泌和吸收,促进关节 周围软组织的血液循环和损伤软组织的修复
临床实践证明,CPM可以缓解疼痛,改善关节活动 范围,防止粘连和关节僵硬,消除手术和制动带来 的并发症
治疗作用
改善关节活动范围
关节不活动
组织纤维增生 关节内粘连 肌腱、韧带和关节囊挛缩
Ⅲ、Ⅳ级手法
直接牵拉了关节周围的软组织
保持或增加其伸展性
治疗作用
增加本体反馈
提供下列本体感觉信息
关节的静止位置和运动速度及其变化 关节运动的方向 肌肉张力及其变化
临床应用:适应证
力学因素引起的关节功能障碍 关节疼痛、肌肉紧张及痉挛 可逆性关节活动降低
胶原纤维具有抗伸展性 疏松结缔组织可缩短和固定 网状纤维可收缩而致密、坚实 每天多次全范围的正常活动是保持关节正常
活动度的关键
影响关节活动的主要因素
(一)生理因素 1.拮抗肌的肌张力 2.软组织相接触 3.关节的韧带张力 4.关节周围组织的弹性情况 5.骨组织的限制
(二)病理因素
1.关节周围软组织疼痛 2.关节周围软组织挛缩、粘连或
关节松动技术
近20~30年来发展很快, 形成了独立的体系
maitland对这一技术的发 展贡献很大,故此也有将其 称为“麦特兰德手法 ”或 “澳式手法”
I
I
II
II
III
IV
III IV
A
起始端
B
终末端
A
- B 关节活动允许范围
关节活动度
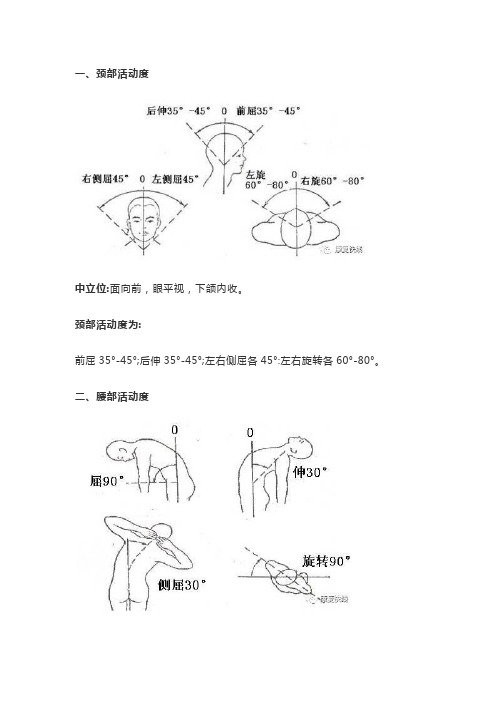
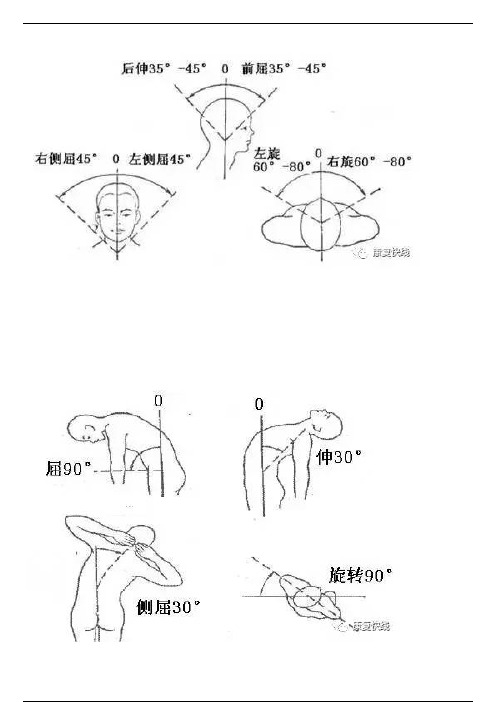
一、颈部活动度中立位:面向前,眼平视,下颌内收。
颈部活动度为:前屈35°-45°;后伸35°-45°;左右侧屈各45°:左右旋转各60°-80°。
二、腰部活动度腰椎中立位不易确定。
前屈:测量数值不易准确,患者直立,向前弯腰,正常时中指尖可达足面,腰椎呈弧形,一般称之为90°。
后伸:30°。
侧屈:左右各30°。
侧旋:固定骨盆后脊柱左右旋转的程度,应依据旋转后两肩连线与骨盆横径所成角度计算。
正常为30°。
三、肩关节活动度屈曲:开始位置:仰卧位;臂位于躯干侧方用手心朝下。
测量方法:矢状面。
避免连带动作:弓背。
转动躯干。
量角器:轴心位于关节侧方肩峰下方。
固定臂平行于躯干腋中线。
活动臂平行于肱骨中线。
伸展:开始位置:俯卧位;臂位于躯干两侧且手心朝下。
测量方法:矢状面。
避免连带动作:肩抬离台面。
转动躯干。
量角器:轴心位于关节侧方肩峰下方。
固定臂平行于躯干腋中线。
活动臂平行于肱骨中线。
外展:开始位置:仰卧位,上肢放在身体两侧。
测量方法:前面观(必须向外侧最大限度地旋转肩关节。
避免连带动作:躯干向侧方运动。
转动躯干。
量角器:轴心位于肩关节前面,并与肩峰成一直线。
固定臂平行于躯干中线。
活动臂平行于肱骨中线。
内旋:开始位置:仰卧位;臂外展至90°;肘关节屈曲90°且手心向下:前臂垂直于地面。
测量方法:横断面。
避免连带动作:伸展肩关节。
旋转躯干。
改变肩肘关节初始角度。
量角器:轴心通过肱骨的垂直轴。
固定臂垂直于地面。
活动臂平行于前臂中心。
外旋:开始位置:仰卧位;臂外展至90°;肘关节屈曲90°且手心向下,前臂垂直于地面。
测量方法:横断面。
避免连带动作:弓臂,旋转躯干,改变肩、肘关节角度。
量角器:轴心通过肱骨的垂直轴。
固定臂垂直于地面。
活动臂平行于前臂中心。
水平屈曲、水平伸展:开始位置:坐位,肩关节90°外展,肘伸展,掌心向下。
关节活动度评定详解
康复医学基础 关节活动范围
教师:胡苗 班级:2014级辅具班 单位:安徽省特殊教育中专学校
操关 作节 活 动 度 实 测
量关 方节 法活 动 度 的 测
概 述
关 节 活 动 度
•
•
•
第一节 概述
关节活动度 关节活动度评定 关节活动度受限的原因
关节活动度
• 定义: • 关节活动度又称关节活动范围(range of motion,ROM),是指关节活动时所通过的 最大运动弧或最大转动角度。 • 具体而言是指关节的移动骨在靠近或远离 固定骨的运动过程中,移动骨所达到的新 位置与起始位置之间的夹角。
• 体位:坐位、立位。肩关节无外 展、内收、旋转,前臂中立位, 手掌面向躯干。 • 中心:肩峰。 • 固定臂:与腋中线平行。 • 移动臂:与肱骨长轴相平行。 • 运动:屈曲是在矢状面向前上方 运动;伸展是向后方运动。 • 正常值:屈曲0º-180º,伸展0º60º。
肩关节活动度——屈曲、伸展
肩关节活动度——外展、内收
• 体位:坐位,前臂、手放于桌面,前臂旋后,腕关节中立 位。 • 中心:拇指指骨间关节桡侧。 • 固定臂:拇指近节指骨纵轴。 • 移动臂:拇指远节指骨纵轴。 • 运动:屈曲,拇指远节指骨向靠近手掌方向运动。 • 正常值;屈曲0-80°。
拇指指骨间关节屈曲
拇指的外展、内收
• • • • • 体位:腕关节呈中立位,手指伸展。 中心:腕掌关节。 固定臂:食指(桡骨的延长线)。 移动臂:拇指。 运动:外展,在手掌面上.拇指向离开食指的方向运动。 内收,与外展方向相反,向食指方向返回的运动。 • 正常值:外展0-60°,内收60°-0。
• 体位:腕关节中立位,手指伸 展位。 • 中心:两轴的交点。 • 固定臂:第3指骨纵轴。 • 移动臂:第2、4、5指骨纵轴。 • 运动:外展,食指、环指、小 指在掌面做向远离中指方向的 运动。内收,以上各指做向靠 近中指方向的运动。 • 测定值可以用角度表示,也可 以用手指尖处的距离表示。
各关节活动度测量的超详细图解
1、颈部活动度中立位: 面向前,眼平视,下颌内收。
颈部活动度为:前屈35°-45°;后伸35°-45°;左右侧屈各45°:左右旋转各60°-80°。
2、腰部活动度腰椎中立位不易确定。
前屈: 测量数值不易准确,患者直立,向前弯腰,正常时中指尖可达足面,腰椎呈弧形,一般称之为90°。
后伸:30°。
侧屈: 左右各30°。
侧旋:固定骨盆后脊柱左右旋转的程度,应依据旋转后两肩连线与骨盆横径所成角度计算。
正常为30°。
3、肩关节活动度屈曲: 开始位置:仰卧位;臂位于躯干侧方用手心朝下。
测量方法:矢状面。
避免连带动作:弓背。
转动躯干。
量角器:轴心位于关节侧方肩峰下方。
固定臂平行于躯干腋中线。
活动臂平行于肱骨中线。
伸展: 开始位置:俯卧位;臂位于躯干两侧且手心朝下。
测量方法:矢状面。
避免连带动作:肩抬离台面。
转动躯干。
量角器:轴心位于关节侧方肩峰下方。
固定臂平行于躯干腋中线。
活动臂平行于肱骨中线。
外展: 开始位置:仰卧位,上肢放在身体两侧。
测量方法:前面观(必须向外侧最大限度地旋转肩关节。
避免连带动作:躯干向侧方运动。
转动躯干。
量角器:轴心位于肩关节前面,并与肩峰成一直线。
固定臂平行于躯干中线。
活动臂平行于肱骨中线。
外旋:开始位置:仰卧位;臂外展至90°;肘关节屈曲90°且手心向下,前臂垂直于地面。
测量方法:横断面。
避免连带动作:弓臂,旋转躯干,改变肩、肘关节角度。
量角器:轴心通过肱骨的垂直轴。
固定臂垂直于地面。
活动臂平行于前臂中心。
内旋: 开始位置:仰卧位;臂外展至90°;肘关节屈曲90°且手心向下:前臂垂直于地面。
测量方法:横断面。
避免连带动作:伸展肩关节。
旋转躯干。
改变肩肘关节初始角度。
量角器:轴心通过肱骨的垂直轴。
固定臂垂直于地面。
活动臂平行于前臂中心。
关节活动度测量图解-关节角度测量表

关节活动度测量图解(数据以“国家《(一)事故伤害损失工作日》”为准)一、颈部活动度中立位:面向前,眼平视,下颌内收。
颈部活动度为:前屈35°-45°;后伸35°-45°;左右侧屈各45°:左右旋转各60°-80°。
二、腰部活动度腰椎中立位不易确定。
前屈:测量数值不易准确,患者直立,向前弯腰,正常时中指尖可达足面,腰椎呈弧形,一般称之为90°。
后伸:30°。
侧屈:左右各30°。
侧旋:固定骨盆后脊柱左右旋转的程度,应依据旋转后两肩连线与骨盆横径所成角度计算。
正常为30°。
三、肩关节活动度屈曲:开始位置:仰卧位;臂位于躯干侧方用手心朝下。
测量方法:矢状面。
避免连带动作:弓背。
转动躯干。
量角器:轴心位于关节侧方肩峰下方。
固定臂平行于躯干腋中线。
活动臂平行于肱骨中线。
伸展:开始位置:俯卧位;臂位于躯干两侧且手心朝下。
测量方法:矢状面。
避免连带动作:肩抬离台面。
转动躯干。
量角器:轴心位于关节侧方肩峰下方。
固定臂平行于躯干腋中线。
活动臂平行于肱骨中线。
外展:开始位置:仰卧位,上肢放在身体两侧。
测量方法:前面观(必须向外侧最大限度地旋转肩关节。
避免连带动作:躯干向侧方运动。
转动躯干。
量角器:轴心位于肩关节前面,并与肩峰成一直线。
固定臂平行于躯干中线。
活动臂平行于肱骨中线。
内旋:开始位置:仰卧位;臂外展至90°;肘关节屈曲90°且手心向下:前臂垂直于地面。
测量方法:横断面。
避免连带动作:伸展肩关节。
旋转躯干。
改变肩肘关节初始角度。
量角器:轴心通过肱骨的垂直轴。
固定臂垂直于地面。
活动臂平行于前臂中心。
外旋:开始位置:仰卧位;臂外展至90°;肘关节屈曲90°且手心向下,前臂垂直于地面。
测量方法:横断面。
避免连带动作:弓臂,旋转躯干,改变肩、肘关节角度。
量角器:轴心通过肱骨的垂直轴。