合嵌盘古 MPU6050陀螺仪模块规格书
MPU6050原始数据分析

本章旨在讲解以下内容1.加速度2.陀螺仪3.磁力计MiniIMU AHRS姿态板销售网址:/作者:lisn31880序言一直想写篇文章关于姿态解算原理的,使用尽量通俗的语句说明如何从加速度计和陀螺仪的数据,融合得到载体的姿态角。
无奈自己的水平有限,一直搁置。
淡泊以明志,宁静以致远.人总是要逼自己做些事,才过得心安理得。
那就拿点时间把这方面的资料整合一下吧。
这篇文章的大部分内容都不是本人原创的,感谢网络上无私奉献的人.在此介绍一下实验的姿态板 ,新一代的mini AHRS ,采用STM32F103单片机进行姿态解算,板子上集成有1.MPU6050,三轴的加速度和陀螺仪2.HMC5883 三轴的磁力计3.BMP180 高精度气压高度计这些传感器都通过I2C 接口连接到主控制器STM32.不需要额外的ADC 电路,直接通过数字接口就可以读取传感器的当前输出.SDA BMP180气压高度计Mini AHRS 硬件框图Mini AHRS 是一个九轴的姿态仪模块,使用的都是数字器件,每一个传感器内部都集成有ADC ,只需要通过I2C 总线,就可以读取传感器当前输出。
现在我们不着急了解如何读出这些数据,先来认识一下这些传感器都是做什么,它们主要是测量哪些物理量,从加速度计开始。
1加速度计加速度计顾名思义,就是测量加速度的.那么,我们如何认识这个加速度呢?在此用一个盒子形状的立方体来做模型,认识加速度,如下,盒子内的图像。
如果我们把盒子形状的立方体 放在一个没引力场的地方,球会保持在盒子的中间.你可以想象,这个盒子是在外太空,远离任何天体,很难找到这样的地方,就想象飞船轨道围绕地球飞,一切都是在失重状态下。
那么六个壁面感受到的压力都是0.如果我们突然将立方体向左侧移动(我们加快加速,1G =9.8米/ S ^ 2),皮球打在了墙上X-。
然后,我们测量球适用于在X轴上的壁和输出-1g 值的压力。
如下图失重状态请注意,加速度计反应的加速向量与当前的受力方向是相反的.如上图所示,受力方向向左,但是加速度的向量方向为右.如果我们把这个小盒子拿来放在地球上,那么小球会落在Z-壁面上,并会为1G的底壁施加一个力,在下面的图片所示:在这种情况下,框不动,但我们仍然可以得到Z轴的读数-1G。
MPU6050寄存器操作
MPU6050寄存器操作MPU6050的寄存器地址由一个7位的二进制数字表示,最高位为0表示读操作,为1表示写操作。
在进行寄存器操作之前,需要先向MPU6050的I2C地址发送START信号,然后发送要读写的寄存器地址,再发送ACK信号。
下面是一些常用的MPU6050寄存器及其功能说明:1.SMPLRT_DIV寄存器(采样频率分频器):用于配置采样频率,通过设置寄存器的值,可以调整采样频率的分频比。
2. Gyro Config寄存器(陀螺仪配置):用于配置陀螺仪的量程和滤波器。
通过设置寄存器的值,可以选择陀螺仪的量程范围和滤波器带宽。
3. Accelerometer Config寄存器(加速度计配置):用于配置加速度计的量程和滤波器。
通过设置寄存器的值,可以选择加速度计的量程范围和滤波器带宽。
4.PWR_MGMT_1寄存器(电源管理):用于控制MPU6050的电源管理,包括选择时钟源、休眠模式等。
通过设置寄存器的值,可以控制MPU6050的电源状态。
5.FIFO寄存器(数据缓冲区):MPU6050内部有一个FIFO缓冲区,用于存储传感器的原始数据。
通过读写FIFO寄存器,可以实现对传感器数据的存取。
在进行MPU6050寄存器操作时1.寄存器操作需要使用I2C总线进行通信,需要先初始化I2C接口,并设置MPU6050的I2C地址。
2.在进行寄存器写操作时,需要先向MPU6050发送START信号,然后发送写操作的寄存器地址及要写入的数据,最后发送STOP信号。
3.在进行寄存器读操作时,需要先向MPU6050发送START信号,然后发送读操作的寄存器地址和MPU6050的I2C地址,再发送ACK信号。
接着读取MPU6050返回的数据,最后发送STOP信号。
4.在进行寄存器操作时,需要根据MPU6050的数据手册来确定寄存器地址和相关配置值的含义和取值范围。
使用MPU6050时,可以通过对寄存器的配置来满足不同的应用需求。
mpu6050中断原理

mpu6050中断原理
MPU6050是一个传感器模块,通常包含三轴陀螺仪和三轴加速度计,并支持中断功能。
以下是MPU6050的中断原理:
1. 陀螺仪和加速度计数据:MPU6050通过内部ADC(模数转换器)将陀螺仪和加速度计的模拟信号转换为数字信号,并通过I2C接口或其他通信接口将数据传输到微控制器或其他处理单元。
2. 阈值设置:在MPU6050中,可以设置加速度计和陀螺仪的阈值,当数据超过或低于这些阈值时,会产生一个中断信号。
3. 中断信号:当MPU6050的陀螺仪或加速度计数据超过或低于设定的阈值时,会输出一个中断信号(通常是一个下降沿或上升沿脉冲信号)。
这个中断信号可以连接到微控制器的外部中断引脚。
4. 微控制器处理:微控制器在接收到中断信号后,会执行相应的中断服务程序(ISR)。
在ISR中,微控制器可以读取MPU6050的数据寄存器,获取当前陀螺仪和加速度计的测量值,并根据这些值进行进一步的处理或控制。
需要注意的是,具体的中断原理和实现方式可能因微控制器和MPU6050的型号而有所不同。
在实际应用中,需要根据具体的硬件平台和开发环境进行相应的配置和编程。
MPU_6050模块角度算法处理及在嵌入式中的应用_邱云平
0引言MPU-6050集成了3轴MEMS 陀螺仪,3轴MEMS 加速度计以及一个可扩展的数字运动处理器DMP (Digital Motion Processor),可用I2C 接口连接一个第三方的数字传感器,比如磁力计。
扩展之后,就可以通过其I2C 接口输出一个9轴的信号。
MPU-6050也可以通过其I2C 接口连接非惯性的数字传感器,比如压力传感器。
MPU-6050对陀螺仪和加速度计分别用了三个16位的ADC ,将其测量的模拟量转化为可输出的数字量。
为了精确跟踪快速和慢速的运动,传感器的测量范围都是用户可控的,陀螺仪可测范围为±250,±500,±1000,±2000°/秒(dps),加速度计可测范围为±2,±4,±8,±16g 。
一个片上1024字节的FIFO ,有助于降低系统功耗。
MPU-6050模块与所有设备寄存器之间的通信采用400kHz 的I2C 接口,片上还内嵌了一个温度传感器和在工作环境下仅有±1%变动的振荡器[1]。
它的应用范围相当广,如智能手机,平板电脑,游戏机,3D 遥控器,可携式导航设备和玩具小车等。
1陀螺仪、加速度计和MPU-6050及MPU-6050的电路设计1.1陀螺仪、加速度计的简要介绍陀螺仪是一种用来传感与维持方向的装置,是基于角动量守恒理论设计出来的。
陀螺仪主要是由一个位于轴心且可旋转的转子构成。
陀螺仪一旦开MPU-6050模块角度算法处理及在嵌入式中的应用邱云平1,伍宝玉2(1、深圳蓝桥林科技有限公司,广东深圳518127;2、都昌县司法局,江西九江332600)摘要:本文主要介绍MPU-6050全球首例6轴运动处理传感器,论述一种对MPU-6050的数据处理的新思想和算法。
本设计主要讨论三个要点:第一、比较陀螺仪、加速度传感与9轴运动处理传感器(MPU-6050)的差距;第二、通过积分算法对MPU-6050模块采集的数据进行处理,从而获得更为准确的角度;第三、MPU-6050在嵌入式中的具体应用。
笔记——MPU6050初始化配置

最近接触MPU6050,下面对6050初始化配置做一点总结,如有错误还望不吝赐教。
检验IIC底层:在初始化MPU6050前,先确定单片机与MPU6050通信是否正常,根据手册MPU6050采用的是400kbit/s的IIC。
验证IIC底层的方法:读取寄存器117(WHO_AM_I)的值,也就是读取MPU6050的器件地址,默认0x68。
若能够读到0x68,说明你的IIC地层没什么问题。
当然了,读取MPU6050地址时,可以不用对MPU6050进行任何配置,只要给器件供电就行了。
此时,MPU6050上电默认时钟是内部8MHz振荡器。
MPU6050初始化配置:借鉴网上资料,有关MPU6050的基本配置的几个寄存器为:寄存器25 –Sample Rate Divider (SMPRT_DIV):配置陀螺仪输出分频寄存器26 –Configuration (CONFIG):配置数字低通滤波器寄存器27 –Gyroscope Configuration (GYRO_CONFIG):配置陀螺仪满量程寄存器28 –Accelerometer Configuration (ACCEL_CONFIG):加速度满量程寄存器107 –Power Management 1 (PWR_MGMT_1):配置模式、时钟注意:第一步:解除休眠,进入工作模式,一定要延时等待上百毫秒,否则初始化不成功。
//另一个程序并没有设置延时第二步:配置好MPU6050时钟源,一般选择陀螺仪一个方向上的时钟源,以保证陀螺仪采集数据的精度。
第三步:选择加速度满量程、陀螺仪满量程,配置数字低通滤波器、陀螺仪输出分频。
简单配置完这几个寄存器,就可以读取MPU6050数据了,高级配置还请参考MPU6050的相关手册。
举例如下:i2cWrite(devAddr,MPU6050_RA_PWR_MGMT_1,0x00); //解除休眠delay_ms(200); /*解除休眠后的延时要上百毫秒,否则初始化不成功*/ //另一个程序并没有设置延时i2cWrite(devAddr,MPU6050_RA_PWR_MGMT_1,0x03); //选时钟i2cWrite(devAddr,MPU6050_RA_CONFIG,0x03); //加速度44hz滤波,陀螺仪42hz滤波i2cWrite(devAddr,MPU6050_RA_SMPLRT_DIV,0x00); //陀螺仪采样率,1khz效果不错i2cWrite(devAddr,MPU6050_RA_GYRO_CONFIG,0x18); //陀螺仪最大量程+-2000度每秒i2cWrite(devAddr,MPU6050_RA_ACCEL_CONFIG,0x08); //加速度度最大量程+-4G。
MPU6050 计算角度
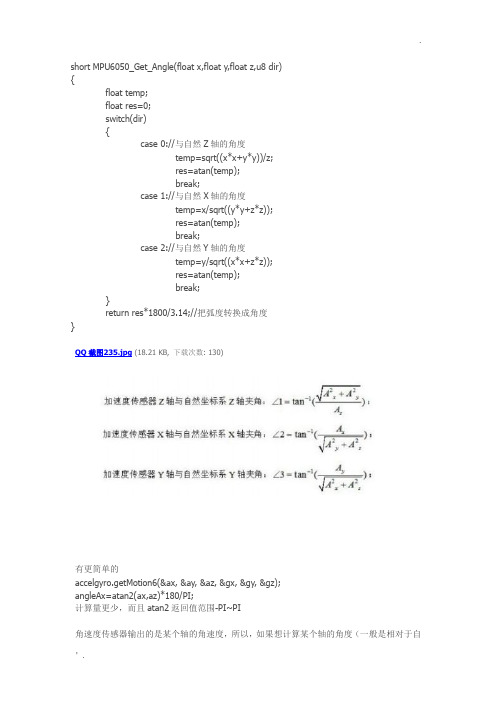
short MPU6050_Get_Angle(float x,float y,float z,u8 dir){float temp;float res=0;switch(dir){case 0://与自然Z轴的角度temp=sqrt((x*x+y*y))/z;res=atan(temp);break;case 1://与自然X轴的角度temp=x/sqrt((y*y+z*z));res=atan(temp);break;case 2://与自然Y轴的角度temp=y/sqrt((x*x+z*z));res=atan(temp);break;}return res*1800/3.14;//把弧度转换成角度}QQ截图235.jpg(18.21 KB, 下载次数: 130)有更简单的accelgyro.getMotion6(&ax, &ay, &az, &gx, &gy, &gz);angleAx=atan2(ax,az)*180/PI;计算量更少,而且atan2返回值范围-PI~PI角速度传感器输出的是某个轴的角速度,所以,如果想计算某个轴的角度(一般是相对于自然坐标轴),那么只需要对角速度进行积分就可以了,举例来说,我们现在要测量X轴的角度,那么先假设起始状态x轴和自然坐标轴的角度为0,那么现在你可以将x轴想象成一辆只有速度仪表的汽车,汽车按照一定的速度行驶在一段时间后,如果你要计算汽车(x轴)到起始点的距离(x轴和自然周的角度),那么你只需要用车速(x轴的角速度)*时间就可以算出来了。
当然,传感器的角速度输出严格来说是一个瞬时值,实际中不太可能是一个匀速值,所以需要做一些处理。
希望对你有帮助。
我也是刚接触这个东西,共同学习吧。
你好,请问mpu6050的传感器,既可以求加速度,也可以算出角度?如果我想消除重力加速度的影响,有木有什么办法?具体的我也没做过,根据我了解的一些信息提供以下几个方法:第一通过滤波器,过滤掉重力角速度的影响;第二看你需要计算那个轴的加速度,想办法保持这个轴和重力成90度角;第三将两个陀螺仪安装到一个平面,其中一个作为测量平面的倾斜角度,另外一个作为测量加速度,通过角度来反推消除重力加速度对其他各轴的影响。
MPU6050教程
MPU6050教程MPU6050是一款六轴传感器,可测量加速度和角速度。
它集成了三轴加速度计和三轴陀螺仪,同时还具备温度传感器。
这使得MPU6050非常适合于飞行器、机器人和游戏控制器等项目。
在本教程中,我们将介绍如何使用MPU6050传感器,并使用Arduino进行数据读取和处理。
1.硬件准备:-MPU6050模块- Arduino主控板-杜邦线-电阻(10kΩ)先将杜邦线连接到MPU6050模块上。
将VCC接到Arduino的5V引脚,将GND接到地线引脚,将SCL接到Arduino的A5引脚(或者SCL引脚),将SDA接到Arduino的A4引脚(或者SDA引脚)。
注意:MPU6050是通过I2C协议与Arduino通信的,因此您需要确认Arduino上的I2C引脚与连接的引脚匹配。
2.软件准备:- MPU6050库(可在Arduino库管理器中)打开Arduino IDE并创建一个新的项目。
在库管理器中“MPU6050”,并安装最新版本的库。
然后在工具菜单中选择适当的Arduino板和端口。
3.代码编写:在新建的Arduino项目中,首先包含MPU6050库,然后声明四个变量,分别用于存储加速度计和陀螺仪的值。
在setup函数中,初始化MPU6050并打开串口通信。
```cpp#include <Wire.h>#include <MPU6050.h>int16_t accel_x, accel_y, accel_z;int16_t gyro_x, gyro_y, gyro_z;void setuWire.begin(;mpu.initialize(;Serial.begin(9600);}```4.数据读取:在loop函数中,使用mpu.getMotion6函数读取加速度计和陀螺仪的数据。
您可以使用Serial.print函数将这些值打印到串口监视器中。
```cppvoid loompu.getMotion6(&accel_x, &accel_y, &accel_z, &gyro_x, &gyro_y, &gyro_z);Serial.print("Accel: ");Serial.print(accel_x);Serial.print(" ");Serial.print(accel_y);Serial.print(" ");Serial.println(accel_z);Serial.print("Gyro: ");Serial.print(gyro_x);Serial.print(" ");Serial.print(gyro_y);Serial.print(" ");Serial.println(gyro_z);delay(100); // 数据读取延迟}```5.数据解释:加速度计和陀螺仪的值是原始数据,单位为每个轴的原始计数。
米思奇对mpu6050用法
米思奇对mpu6050用法MPU6050是一款常用的加速度计和陀螺仪传感器模块。
它由MEMS(微机电系统)技术制造而成,可以测量物体的加速度和角速度。
米思奇(Mithun Chakravarthy)是一位专业的工程师,有着丰富的MPU6050用法经验。
MPU6050在许多领域都有广泛的应用,包括运动控制、平衡器、姿态控制等。
米思奇掌握了MPU6050的使用方法,并能准确地解读传感器输出的数据。
要正确使用MPU6050,首先需要连接传感器模块到微控制器或单片机。
接下来,编写相应的代码,配置传感器的设置,并读取传感器输出的数据。
米思奇能够编写支持各种微控制器平台的代码,例如Arduino、Raspberry Pi等。
在使用MPU6050时,必须了解传感器的工作原理和数据格式。
米思奇能够正确解析传感器输出的加速度和角速度数据,并将其转换为可用的物理量,如角度、速度等。
他还能根据应用需求进行数据滤波和校准,以提高数据的准确性和稳定性。
米思奇还知道如何进行传感器数据的实时处理和分析。
他能够使用算法和数学模型,从传感器输出的数据中提取有用的信息,并作出相应的控制决策。
他可以设计和实现姿态控制算法,使物体能够保持平衡或完成特定的动作。
米思奇对MPU6050的用法非常熟悉。
他具备将传感器模块与微控制器连接的技能,能够编写代码配置和读取传感器数据。
他了解传感器的工作原理和数据格式,并具备数据处理和分析的能力。
通过他的专业知识和经验,MPU6050可以得到正确的应用和使用。
MPU6050读取原始数据
MPU6050读取原始数据新人小白,想做四轴,初学stm32.3月15号在淘宝上买了一块6050模块,今天刚刚用stm32读到数据。
其中也遇到了很多问题,现在在这里贴出来跟大家分享一下成功读出来的过程。
先贴一张图吧javascript:;以前一直在学习51现在转到stm32感觉区别还是挺大的.下面梳理一下自己遇到过的关于读6050数据的问题:1. 卖家给的51程序成功读取到6050数据,stm32未成功,网上下载了很多程序也未成功读取(可能自己不会修改某些参数)。
2. stm32模拟IIC管脚问题。
3. 6050初始化问题。
4. IIC读取到数据不正确遇到过问题。
1).数据全部为ff 2).数据全部为-1 3).数据有规律的成周期性的循环 4).读取6050 0x75地址数值为 ff或0或不确定的值(反正不是0x68)自己的处理过程:1.先用51成功的读到了6050数据(证明6050是好的),看别人的程序的大体框架(细看有些地方也看不懂......)。
2.首先是配置问题————输出用推挽输出,输入用上拉输入(总线外部未接上拉电阻),端口时钟,IO口初始化,SDA端口不停地切换输入输出模式。
其次是模拟IIC协议—————基础(后来由于读不到正确的数据,把以前的资料拿出来看了很多遍......)3.6050初始化,有很多寄存器,也没有细细研究。
但是我在一点里提到,虽然网上很多stm32读6050程序未能成功运行,但是他们的初始化程序大致相同。
所以我就直接粘过来用了......(以后再细细研究)4.IIC读数据不正确:过程很坎坷......今天礼拜日没课,所以昨晚干到3点多也未能读到正确数据........总结一下论坛里遇到过此问题后的处理方法吧:1).IIC模拟不正确//包括电平持续时间,应答的发出,数据读取逻辑顺序2).模拟正确后没有初始化3).IIC初始化和6050初始化的时间间隔,需要延迟一段时间4).软件复位6050。
陀螺仪和加速度计MPU6050的单位换算方法
陀螺仪和加速度计MPU6050的单位换算方法对于四轴初学者来说,可能无法理解四轴源代码中陀螺仪和加速度数据的数学变换方法。
下面我们来详细描述一下这些转换方法。
我们首先来看陀螺仪数据。
在MPU6050的手册里面,提供了一个陀螺仪数据表如下:在表格里面,列出了当寄存器FS_SEL选择不同数值时的陀螺仪量程范围。
以四轴常用的FS_SEL=3为例,这时陀螺仪的量程为-2000到+2000。
由于MPU6050采用的是16位带符号数作为陀螺仪测量数据输出,即数据类型是int16。
所以以16进制来表示,最小的数是FFFF,由于最高位为符号位,所以相当于-7FFFF,即-32767;最大的数是7FFF,即32767。
综合上述的描述,我们可以得到,数字-32767对应-2000度每秒的陀螺仪角速度,32767对应2000度每秒的陀螺仪角速度。
把32767除以2000,就可以得到16.40,即我们说的灵敏度。
从上面的计算可知,把从陀螺仪读出的数字除以16.40,就可以换算成陀螺仪的角速度数值。
举个例子,如果我们从陀螺仪读到的数字是1000,那么对应的角速度数据是1000/16.40=61度每秒。
在四轴姿态计算中,我们通常要把角度换算成弧度。
我们知道2Pi代表360度,那么1度换算成弧度就是:2Pi/360=(2*3.1415926)/360=0.0174532。
用倒数表示就是:1/57.30通过上述分析,我们就可以知道,当采用量程为-2000到+2000的范围,把我们从陀螺仪获取的数据做如下处理,就可以用于四元数的姿态解算(用gyro_x来代表从陀螺仪读到的数据): gyro_x/(16.40*57.30)=gyro_x*0.001064,单位为弧度每秒。
接下来,我们看加速度计:采用和陀螺仪同样的计算方法,当AFS_SEL=3时,数字-32767对应-16g,32767对应16g。
把32767除以16,就可以得到2048,即我们说的灵敏度。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
合嵌盘古
陀螺仪模块规格书
合嵌盘古Gyroscope-601陀螺仪模块,测量运动或震动的三轴全方向的角速
度值和加速度值,角速度最大测量范围±2000°/sec,加速度最大测量范围达到±
16g。
合嵌盘古陀螺仪模块采集到的物体运动的实际角速度值和加速度值,直接从
串口输出。输出的数据格式有两种形式,分别为16进制数据和根据传感器芯片手
册中的数据转换规则转换得到的实际角速度值和加速度值。
另外,本陀螺仪模块可以通过串口设置加速度阀值。当加速度模块测量到物
体运动的加速度达到此阀值时,将通过IO口输出一个高电平或低电平的跳变信
号,作为中断信号使用。
合嵌盘古Gyroscope-601陀螺仪模块通过串口输出的加速度值数据如下所示:
aX=0X66 +0.0g
aY=0Xfff3 -0.0g
aZ= 0Xe8b +0.9g
gX=0Xffc6 -0.43dps
gY=0X2d +0.34dps
gZ= 0Xff7b -1.01dps
其中:aX、aY、aZ分别表示三轴加速度值,gX、gY、gZ分别表示三轴角速
度值。其中 aX=0X66 +0.0g 中的0X66表示传感器测量到的16进制加速度
值, +0.0g表示根据加速度传感器芯片的数据转换规则转换成的物体运动的加速
度值。其中 gX=0Xffc6 -0.43dps 中的0X ffc6表示传感器测量到的16进制角
速度值,-0.43dps表示根据加速度传感器芯片的数据转换规则转换成的物体运动
的角速度值。
陀螺仪模块的电气参数:
工作电压: +5V
工作电流: ≤50mA
陀螺仪模块的技术参数:
测量方向:三轴全方向
自检测: 支持传感器模块的自检测
加速度值测量范围: ≤±16g
角速度最大测量范围: ≤
±2000°/sec
最高灵敏度: ≤131 LSB/(º/s)
数据输出率:最大8KHz
抗震动的最大忍受度:≤1000g
联系Q Q: 1094606988
加速度模块研发生产商:安徽合嵌电子科技有限公司
地址:滁州市花园西路82号1栋302#
网址:www.ue-tech.net
应用
汽车运动及汽车转弯碰撞检测、轮船运动及转弯碰撞检测、运动物体检
测、电子稳像、光学稳像、 行人导航器、 “零触控”手势用户接口、 姿
势快捷方式 、认证
市场
智能型手机 平板装置设备 手持型游戏产品 游戏机 3D遥控器 可携式
导航设备