AMEsim遗传算法优化PID参数
遗传算法入门实例:对 PID 参数寻优
遗传算法入门实例:对PID参数寻优[原创][这乌龟飙得好快啊]开始之前:假设你已经:能运用C语言,初步了解PID、遗传算法的原理。
遗传算法能干什么?(我有个毛病:每当遇到一个东东,我首先会设法知道:这个东东能干什么呢?)遗传算法可以解决非线性、难以用数学描述的复杂问题。
也许这样的陈述让你觉得很抽象,把它换成白话说就是:有个问题我不知道甚至不可能用数学的方法去推导、解算,那么也许我就可以用遗传算法来解决。
遗传算法的优点是:你不需要知道怎么去解决一个问题; 你需要知道的仅仅是,用怎么的方式对可行解进行编码,使得它能能被遗传算法机制所利用。
如果你运用过PID来控制某个系统,那你一定非常清楚:PID麻烦就在那三个参量的调整上,很多介绍PID的书上常搬一些已知数学模型的系统来做实例环节,但事实上我们面对的往往是不可能用数学模型描述的系统,这个时候该怎么取PID的参值呢?1、可以依靠经验凑试,耗时耗精力。
2、离线规划,这就是下文要做的事情3、在线规划,比方说神经网络PID(后续文章将推出,做个广告先^_^)。
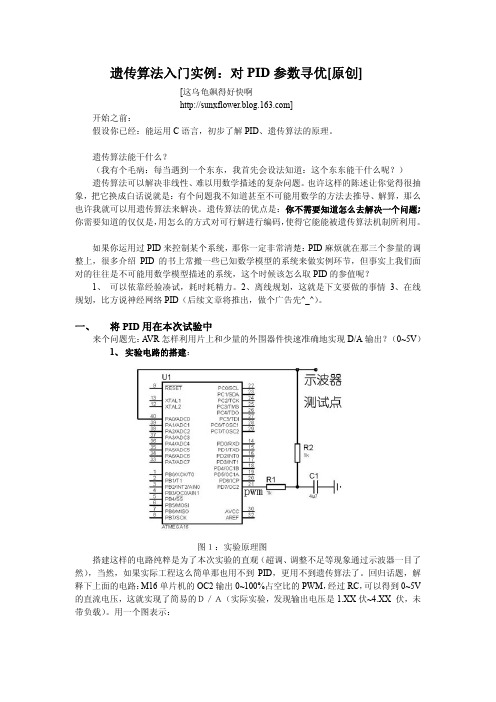
一、 将PID用在本次试验中来个问题先:A VR怎样利用片上和少量的外围器件快速准确地实现D/A输出?(0~5V)1、实验电路的搭建:图1:实验原理图搭建这样的电路纯粹是为了本次实验的直观(超调、调整不足等现象通过示波器一目了然),当然,如果实际工程这么简单那也用不到PID,更用不到遗传算法了。
回归话题,解释下上面的电路:M16单片机的OC2输出0~100%占空比的PWM,经过RC,可以得到0~5V 的直流电压,这就实现了简易的D/A(实际实验,发现输出电压是1.XX伏~4.XX 伏,未带负载)。
用一个图表示:这个时候如果我要输出 3.5V (可以是其它值)电压,该加怎样的PWM呢?(有个简单的方法:标定,但是这种方法系统调整响应速度较为缓慢,理由见图5下附言)也许我们可以把这个输出电压加到A/D反馈到系统,这样就形成了闭环控制:系统输出PWM ——>> PWM 转换成电压——>>A/D 采集,获得实际值与目标值的偏差(例如3.5V )——>>将偏差进行PID 加载到PWM 输出(然后输出又影响下一次的输入……)把示波器加到测试点上,调整扫描周期,使示波器能看到完整的一个调整过程。
PID控制器的参数整定及优化设计

PID控制器的参数整定及优化设计PID控制器是一种广泛应用于工业控制系统中的控制算法。
它的主要作用是根据被控对象的输入信号和输出信号之间的差异来调节控制器的输出信号,从而使被控对象的输出稳定在期望值附近。
而参数整定和优化设计是保证PID控制器能够正常工作和发挥最佳性能的关键。
参数整定是指根据被控对象的特性,选择合适的PID控制器参数,以确保系统的稳定性和快速响应。
参数整定一般分为两个步骤:初步参数整定和精细参数整定。
初步参数整定是通过经验法则或试验方法找到一个较为接近的参数组合,使得系统的响应能够满足基本需求。
常用的初步参数整定方法有:1.经验法则:根据被控对象的特性(如惯性、时滞等)选择经验的比例、积分和微分系数,并根据经验法则进行组合,如经验法则(1/4、1/2、1/8)。
2. Ziegler-Nichols方法:通过改变比例系数和积分时间来观察系统的响应特性,并根据一些准则选择合适的参数。
这种方法包括震荡法、临界比例法和临界周期法。
精细参数整定是通过对系统进行细致的分析和调整,以得到更加理想的控制性能。
常用的精细参数整定方法有:1.调整比例系数:增大比例系数可以提高系统的响应速度,但过大的比例系数可能导致系统震荡。
减小比例系数可以减小震荡,但会降低系统的响应速度。
2.调整积分时间:增大积分时间可以减小系统的静差,但过大的积分时间可能导致系统过冲或震荡。
3.调整微分时间:增大微分时间可以提高系统的稳定性,但过大的微分时间可能导致系统的噪声放大。
4.频率响应法:通过对系统的频率响应进行分析,计算出合适的PID 参数。
5.理论模型方法:通过建立系统的数学模型,采用现代控制理论方法进行参数整定。
优化设计是指对PID控制器的参数进行进一步调整,以满足系统优化的性能指标。
常用的优化设计方法有:1.最小二乘法:通过最小化控制误差的平方和来优化PID控制器的参数。
2.遗传算法:通过模拟自然进化的过程,利用种群中的个体进行参数和优化。
基于遗传算法的永磁同步电机调速系统PID参数优化

维普资讯
变频 与调速 E C MA
迫轧 与控 制 应 田2 , 7  ̄7 4( ) 3
基 于遗传 算 法 的永 磁 同步 电机 调速 系统 I P D参 数优 化 术
焦竹青 , 屈百达 , 徐保 国 ( 南大学 通 信 与控 制 工程 学院 , 苏 无锡 江 江
t ol r
控制理 论 的发展 , 用 模糊 逻 辑 关 系对 PD控 制 利 I
器进 行 优 化 设 计 , 成 为 当 前 的 一 个 研 究 热 已
在 电机驱 动 控 制 系 统 中 , I P D控制 由 于算 法
PMSM . Th p i ls l i n i v r e e ain wa e e v d t u r ne l i d vd l o c v re t lb lo tmi e o tma outo n e ey g n rto sr s r e o g a a te al n ii uast on eg o go a p i —
关 键 词 : 磁 同 步 电 机 ; 传 算 法 : 速 系统 , 永 遗 调 比例 一 分 一 分 控 制 积 微 中图 分 类 号 : M 0 . T 2 1 文献 标 识 码 : 文章 编 号 :6 36 4 (0 7 0 - 3 -4 T 3 12;P 7 A 17 -50 2 0 )70 40 0
基于遗传算法的PID参数整定

基于遗传算法的PID参数整定作者:刘大昕李秒来源:《硅谷》2011年第17期摘要:由于大滞后大惯性的热工被控对象使用简单的PID控制器很难取得很好的效果。
在采用遗传算法对PID控制器参数进行寻优的基础上,引入大滞后补偿技术(状态变量技术和相位补偿技术),先补偿被控对象的滞后和惯性,再采用遗传算法寻优,取得良好的效果。
关键词:遗传算法;大滞后补偿技术;PID控制中图分类号:TP319 文献标识码:A 文章编号:1671-7597(2011)0910028-02反馈是一个非常有用的概念。
反馈控制的使用常常带来革命性的结果,极大地改善了控制性能。
PID控制是到目前为止实际使用中最主要的反馈控制形式。
PID控制是比例積分微分控制的简称。
积分、比例和微分反馈分别基于过去(I)、现在(P)和将来(D)的控制偏差。
在生产过程自动控制的发展历程中,PID控制是历史最久、生命力最强的基本控制方式。
PID控制器的传统整定方法,如Ziegler-Nichols(Z-N)法、响应曲线法、临界比例法、继电型自整定法、单纯形法等,或是依赖于对象模型,或是易于陷入局部极小,均存在一定的应用局限性,且难以实现高性能的整定效果,常常超调较大、调整时间较长、误差指标过大等。
近年来,遗传算法作为一种新兴的优化和自学习算法在控制工程中逐渐受到重视,它是一种基于生物进化论的并行搜索算法,搜索空间大,通过设计合适的算法参数和策略能够避免陷入局部最小。
由于其独到的解决问题的能力,其应用已渗透到控制领域诸多方面(系统辨识和模型降阶、最优控制、线性和非线性控制、滑模控制、鲁棒控制、模糊逻辑控制、神经网络控制和自适应控制等)。
1 PID控制器原理PID控制是一种负反馈控制。
其反馈控制原理图如图1所示。
其中:虚线框内为PID控制器;被控对象为包含了执行器、被控对象、传感器、测量装置的广义过程特性;r(t)为设定值输入,u(t)为控制量,y(t)为被调量,d(t)为扰动输入,n(t)为传感器噪声。
基于遗传算法的PID参数的优化控制策略

基于遗传算法的PID参数的优化控制策略
李树青
【期刊名称】《自动化博览》
【年(卷),期】2013(000)003
【摘 要】在PID参数的优化过程中,采用常规的整定方法,往往费时且难以满足控制
要求.选取遗传算法来进行参数寻优,该方法是一种不需要任何初始信息并可以寻求
全局最优解的、高效的优化组合方法.通过MATLAB仿真实验结果表明,该方法可
以应用于多数控制系统,并能达到良好的控制效果.
【总页数】4页(P100-103)
【作 者】李树青
【作者单位】柳州柳工叉车有限公司,广西柳州545006
【正文语种】中 文
【中图分类】TP273
【相关文献】
1.基于遗传算法的足球机器人模糊PID优化控制策略 [J], 张小川;魏建新;郭鲁;吴
杰
2.基于遗传算法的足球机器人模糊PID优化控制策略 [J], 张小川;魏建新;郭鲁;吴
杰
3.一种基于遗传算法的PID参数的优化控制策略 [J], 李建新;柳利军
4.基于小生境遗传算法的PID参数优化 [J], 张鹏;孙红艳
5.基于遗传算法的长输管道PID控制参数优化 [J], 任亮;许超
因版权原因,仅展示原文概要,查看原文内容请购买
PID参数的调整方法
PID参数的调整方法PID控制器是一种广泛应用于工业自动化控制系统中的一种控制算法,通过对控制系统的反馈信号进行分析和调整,来实现对控制系统的稳定控制。
PID参数调整的目的是通过修改PID控制器的三个参数(比例增益P、积分时间Ti、微分时间Td),来达到最优的控制效果。
下面将介绍几种常见的PID参数调整方法。
1.经验法:经验法是一种直接根据经验经验的方法来调整PID参数的调整方法,是初学者常用的方法。
经验法的基本原理是通过系统的试验,根据实际的经验经验来进行参数的调整。
其流程主要包括以下几个步骤:1)选择一个适当的比例增益P,使系统能够快速而准确地响应,但不引起系统的振荡。
2)逐渐增加积分时间Ti,使系统的稳态误差趋于零。
3)逐渐增加微分时间Td,使系统的响应更加平稳。
2. Ziegler-Nichols 调参法:Ziegler-Nichols 调参法是一种基于试验的经验方法,适用于较简单的系统。
其主要思想是通过改变比例增益P、积分时间Ti、微分时间Td的值,找到系统的临界增益和周期,然后根据经验公式计算参数。
具体步骤如下:1)以较小的增量逐步增加比例增益P,使系统产生小幅振荡。
2)记录振荡周期Tosc和振幅Aosc。
3)根据经验公式计算PID参数:P = 0.6KoscTi = 0.5ToscTd = 0.125Tosc3. Chien-Hrones-Reswick 调参法:Chien-Hrones-Reswick 调参法是一种经验法,适用于非线性和阻滞比较大的系统。
该方法主要通过分析系统的特性来进行参数调整。
具体步骤如下:1)选择一个适当的比例增益P,使系统快速而准确地响应。
2)根据系统的阶跃响应曲线,确定时间常数τp(过程时间常数),并计算增益裕度Kr(Kr=τp/T p)。
3)根据Kr的值,选择合适的积分时间Ti和微分时间Td。
4.自整定法:自整定法是一种根据系统的特性自动调整PID参数的方法,适用于不断变化的复杂系统。
遗传算法及其在PID参数优化中的应用
18 9 5年在美国卡耐基 ・ 隆大学 召开了“ 一届 国际遗传 算 梅 第
法 学 术 会 议 ” 19 到 97年 5月 IE E E的 T a sc oso vl— rnat n nE o i u
t nr o ua o 刊, i ayC mp ttn创 o i 遗传 算法的研究 日益成熟 , 已成 并
摘 要: 遗传算法是一种基于 自然选择 和遗传机理 的 随机搜 索与全局 优化 的方法。近年 来, 遗传 算法的研 究
日益成 熟 , 已成功应用于机器学习、 程控 制、 济预测 等诸 多领域 。首先探 讨 了遗传 算法 的基 本原理 及其特 并 过 经 点, 然后将其应用 于 PD控 制器的参数优化 中, 真实验表 明该方法是可行 的。 I 仿 关键词 : 遗传算 ;I 参数优化 PD;
3 )搜 索过程 中使用 的是基 于 目标 函数 值的评价 信息 ,
与传 统搜 索算 法不同 , 遗传算法从一组 随机产生 的初 始 解, 称为群体 , 开始搜索过程 。群 体中 的每个个 体是 问题 的
搜索过程既不受优化 函数连续性的约束 , 也没有优化函数 必
收稿 日 : 0 — 3 8 第一作者 任 志淼 期 2 8 0 一l 0
适应程 度。
图 l 遗 传 算 法 的流 程 框 图
12 遗传算法的特点 【 . 3J ・ 1 )自组织 、 自适应和 自学 习性 ( 智能性 ) 。遗传算法消除 了算法设计中的一个 最大障碍 , 即需要事先描述 问题 的全部 特点 , 并要说明针对 问题 的不 同特点算 法应采取 的措施 , 因 此, 它可用来解决复杂的非结构化问题 , 具有很强的鲁棒性。 2 )直接处理的对象是参数的编码集而不是问题参数本身。
机械运动控制系统中的PID参数优化算法研究
机械运动控制系统中的PID参数优化算法研究在机械运动控制系统中,PID控制器是一种常用的控制方式。
PID 控制器通过调节比例、积分和微分三个参数来控制系统的输出,以使系统响应更加稳定和准确。
然而,通常情况下,PID控制器的参数需要根据具体系统的性质来进行优化,以达到更好的控制效果。
为了研究机械运动控制系统中的PID参数优化算法,我们可以从以下几个方面进行探讨。
一、PID控制器的工作原理PID控制器通过反馈信号和设定值之间的差异来调整输出信号,使其逼近设定值。
其中,比例参数决定了输出信号与误差之间的线性关系,积分参数通过积分误差来消除系统稳态误差,微分参数通过对误差的微分来预测未来的误差趋势。
二、PID参数优化的需求对于不同的机械运动控制系统,其动态特性和响应速度不同,因此需要针对具体系统来优化PID参数。
过大或过小的PID参数都会导致系统不稳定或响应迟缓,从而影响系统的控制效果。
因此,寻找合适的PID参数是优化机械运动控制系统的重要步骤。
三、常用的PID参数优化算法1.试误法:通过试验和人工调节的方法逐步找到合适的PID参数,这种方法简单但效率低下。
2.Ziegler-Nichols方法:通过给系统施加一定的输入信号,根据输出信号的响应图像来选择PID参数。
该方法具有简单快捷的优点,但只适用于线性系统。
3.遗传算法:通过模拟生物进化的方式来搜索最优的PID参数组合。
遗传算法能够克服试误法和Ziegler-Nichols方法的局限性,但需要考虑优化算法的复杂性和计算量。
4.模糊PID控制:利用模糊控制理论中的模糊集合和规则库来优化PID参数。
模糊PID控制可以根据系统的不确定性和非线性特性进行精确控制。
四、PID参数在线优化算法传统的PID参数优化算法需要离线实验和调试,无法实时响应系统的变化。
为了解决这个问题,近年来又出现了一些基于模型预测控制的在线PID参数优化算法。
这些算法通过实时监测系统状态和性能指标来动态调整PID参数,以适应系统的变化和特性。
基于遗传算法的PID参数的优化控制策略
基于遗传算法的PID参数的优化控制策略李树青【摘要】在PID参数的优化过程中,采用常规的整定方法,往往费时且难以满足控制要求.选取遗传算法来进行参数寻优,该方法是一种不需要任何初始信息并可以寻求全局最优解的、高效的优化组合方法.通过MATLAB仿真实验结果表明,该方法可以应用于多数控制系统,并能达到良好的控制效果.【期刊名称】《自动化博览》【年(卷),期】2013(000)003【总页数】4页(P100-103)【关键词】遗传算法;PID控制;参数优化【作者】李树青【作者单位】柳州柳工叉车有限公司,广西柳州545006【正文语种】中文【中图分类】TP2731 引言PID(Proportional-Intigral-Differential)控制是比例积分微分控制的简称。
在生产过程自动控制的发展历程中,PID控制是历史最久且生命力最强的基本控制方式之一。
其优点主要体现在以下两个方面:(1)简单实用,易于实现,性能优良。
PID控制器具有简单而固定的形式,原理也不复杂,使用起来很方便,控制效果也很好。
(2)鲁棒性能优良。
其控制品质对被控对象特性的变化不大敏感,在很宽的操作条件范围内都能保持较好的鲁棒性。
由于具有这些优点,PID控制被广泛应用于工业与民用领域,并取得了很好的经济效果。
但PID参数复杂繁琐的参数整定过程一直困扰着工程技术人员,用经验规则加试凑的方式来调整PID控制参数,往往费时且难以满足控制要求,因此,研究PID参数整定技术具有十分重要的工程实践意义。
遗传算法(Genetic Algorithm,CA)为PID参数的优化整定提供了新的途径。
遗传算法只依赖于适应度函数,不需知道对象的全部信息,这样即使在对象模型不确定的情况下,它仍可根据对象的输出情况对PID控制器中的参数进行优化,而且遗传算法的群体优化机制使得它可能找到全局最优解。
2 PID控制2.1 PID控制原理PID控制器本身是一种基于“过去”、“现在”和“未来”信息估计的简单控制算法。
基于遗传算法的异步电机调速系统PID参数优化
基于遗传算法的异步电机调速系统PID参数优化段小丽;任一峰;赵敏【期刊名称】《中北大学学报(自然科学版)》【年(卷),期】2011(032)005【摘要】在对异步电机矢量控制系统分析的基础上,给出了参数优化设计的数学模型,采用了一种改进的遗传算法,并利用Matlab软件对PID参数进行了优化设计,得到了满意的优化参数.讨论了遗传算法的一些关键技术,如改进的二进制编码方法,基于惩罚项的适应度的计算,遗传算子的构造等.提出了用遗传算法优化异步电机调速系统PID参数的方法,并进行了仿真研究.仿真结果表明:遗传算法整定的PID参数用于异步电机的调速系统中,使系统的超调量减少了16.7%,取得了较好的控制效果,同时也验证了遗传算法解决参数优化问题的可行性和优越性.%Based on the vector control system of asynchronous motor, mathematic model of optimal design was provided. An improved genetic algorithm (GA) was adopted to implement the optimization of parameters of PID, which satisfied the design requirement by using Matlab software. Some key problems on GA were discussed, such as an improved binary encoding method, calculation of fitness based on penalty function, construction of genetic operators, and the criteria for heredity termination, etc. The vector control system of optimization PID parameters based on genetic algorithms optimization was proposed for speed control of the asynchronous motor. The simulation result showed that the overshoot of asynchronous motor decreased by 16. 7% percent by using the PIDparameters of GA optimization. It verified the feasibility and superiority of genetic algorithm in parameters optimization.【总页数】5页(P583-587)【作者】段小丽;任一峰;赵敏【作者单位】中北大学信息与通信工程学院,山西太原030051;中北大学信息与通信工程学院,山西太原030051;北京茨服测控技术研究所,北京101101【正文语种】中文【中图分类】TP13;TM352【相关文献】1.基于自适应遗传算法的PID调速系统参数优化 [J], 万星;李伟;乐丰2.改进遗传算法在无刷直流电机调速系统PID参数优化中的应用 [J], 国珍3.基于自适应遗传算法的异步电机矢量控制参数优化与仿真 [J], 冯杏辉;方建安;许红磊;吴瑞岩4.基于自适应遗传算法的感应电动机调速系统PID控制器参数优化 [J], 赵金;张华军5.基于遗传算法的永磁同步电机调速系统PID参数优化 [J], 焦竹青;屈百达;徐保国因版权原因,仅展示原文概要,查看原文内容请购买。