爱普生机器人-机械手初级教学
EPSON机器人通讯连接
EPSON机器人通讯连接随着科技的飞速发展,机器人已经成为了现代社会中不可或缺的一部分。
EPSON作为一家知名的电子产品制造商,其生产的机器人也在市场上占据了一席之地。
本文将探讨EPSON机器人的通讯连接技术及其应用。
一、EPSON机器人的通讯连接方式EPSON机器人主要采用以下几种通讯连接方式:1、无线通讯EPSON机器人可以通过无线通讯方式与计算机、平板电脑或手机等设备进行连接。
这种通讯方式具有方便、灵活的特点,可以随时随地使用机器人进行工作。
无线通讯还可以通过局域网或互联网实现远程控制,使操作更加便捷。
2、串口通讯EPSON机器人还可以通过串口通讯方式与计算机进行连接。
这种方式主要使用RS-232或RS-485接口,数据传输速度较慢,但可靠性较高,适合于在需要较高稳定性的场合下使用。
3、USB通讯USB通讯是一种比较常见的通讯方式,EPSON机器人也不例外。
通过USB接口,机器人可以方便地与计算机进行连接,实现快速的数据传输。
USB接口还支持热插拔功能,使用更加方便。
二、EPSON机器人通讯连接的应用EPSON机器人的通讯连接应用广泛,主要包括以下几个方面:1、工厂自动化在工厂自动化领域,EPSON机器人的通讯连接可以实现生产线上的物料搬运、装配、检测等工作。
通过与计算机、传感器等设备的连接,可以实现生产过程的智能化和自动化,提高生产效率和产品质量。
2、物流配送物流配送领域是EPSON机器人应用的重要领域之一。
通过无线通讯和GPS定位技术,可以将机器人连接到物流系统中,实现货物的快速、准确配送。
机器人还可以在仓库管理中发挥重要作用,提高仓库管理的效率和准确性。
3、医疗护理在医疗护理领域,EPSON机器人的通讯连接可以实现病患监测、药品管理和医疗垃圾处理等工作。
机器人的精确控制和智能化诊断可以提高医疗护理的质量和效率,为患者提供更好的医疗服务。
4、公共服务在公共服务领域,EPSON机器人的通讯连接可以实现如引导、巡逻、安保等工作。
LS6 EPSON机械手手册

iv
LS Rev.8
韩国 东南亚 印度 日本
Epson Korea Co., Ltd. Marketing Team (Robot Business) 27F DaeSung D-Polis A, 606 Seobusaet-gil, Geumcheon-gu, Seoul, 153-803 Korea TEL : +82-(0)-2-3420-6692 FAX : +82-(0)-2-558-4271
1.2.1 滚珠丝杠花键的强度 ....................................................................... 5 1.3 操作注意事项.............................................................................................. 6 1.4 紧急停止 ..................................................................................................... 8
LS Rev.8
v
对于欧盟客户
产品上的打叉带轮垃圾桶标签表示不得通过正常的生活垃圾流处理该产品及内置蓄 电池。为防止危害环境或人类健康,请将该产品及其蓄电池与其他废弃物流分开处 理,确保以环保方式对其回收利用。有关可用收集设施的更多信息,请联系当地政 府机构或购买本产品的零售商。使用化学符号Pb、Cd或Hg表示蓄电池中是否使用了 这些金属。 根据2006年9月6日发布的有关蓄电池和蓄能器及废弃蓄电池和蓄能器的欧洲议会和 理事会2006/66/EC号指令以及撤销指令91/157/EEC和将其纳入各国法律系统的法律, 此信息仅适用于欧盟客户。 对于其他国家,请联系当地政府调查回收该产品的可能性。 蓄电池拆卸∕更换程序见以下手册:
爱普生C4系列机器人惯性计算
C4 Rev.8
37
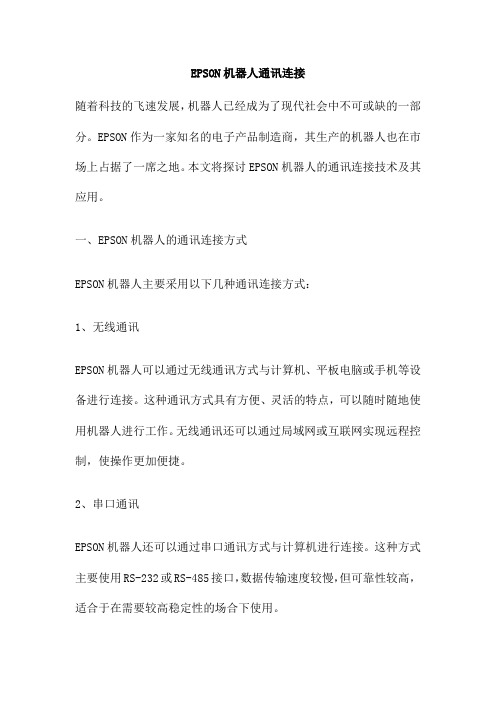
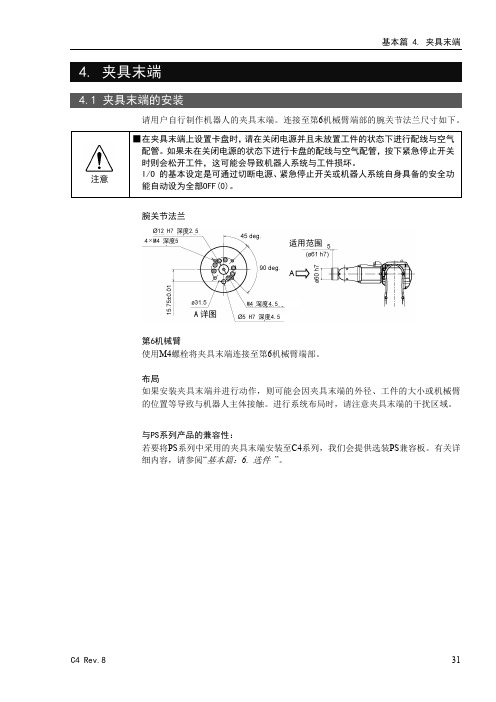
基本篇 4. 夹具末端
使用以下公式计算Weight参数并输入数值。
Weight参数公式 Weight参数 = Mw + Wa + Wb Mw :第6机械臂前端安装的负载重量(kg) Wa :第3机械臂挡板的等效重量(kg) Wb :第5机械臂挡板的等效重量(kg)
Wa = Ma (La)²/ (L)² Wb = Mb (Lb)²/ (L)²
允许负载
机械臂
允许力矩*1
GD2/4允许的惯性力矩
#4
4.41 N·m (0.45 kgf·m)
0.15 kg·m2
#5 *2
4.41 N·m (0.45 kgf·m)
0.15 kg·m2
#6
2.94 N·m (0.3 kgf·m)
0.1 kg·m2
*1 扭矩单位
*2 第5机械臂允许负载的计算如下: 与第5机械臂旋转中心的距离(图:a + 65 [mm])。
34
C4 Rev.8
负载的临界尺寸 负载重心 的位置
基本篇 4. 夹具末端
第 J6 机 械臂旋转 中心
法兰 第 J5 机械臂旋转中心
[单位:mm]
与第 J6 机械臂旋转中心的距
与法兰的距离
使用允许的力矩和惯性力矩计算第5机械臂的负载临界尺寸时,计算值代表与第5机 械旋转中心之间的距离,而不是与法兰之间的距离。因此,要获得第5机械臂负载的 临界尺寸值,需从下例所示计算的距离中减掉 65 (mm)。
机械手(爱普生)

SEIKO EPSON CORPORATION FA機器部
RS3系列特长 【2】
对于制造超紧凑型装置的卓越贡献
占用面积 1/2
700 mm □494
RS3
XY
占用面积 1/3
SCARA
SEIKO EPSON CORPORATION FA機器部
有效作业区域的比较
普通机械手 RS机械手
3 mm
轨迹精度高
150×150mm正方形轨迹的比较
SEIKO EPSON CORPORATION FA機器部
多彩的曲线控制
复杂的三维曲线 也能动作自如
CURVE命令
ECP (Video)
灵敏的外部控制点动作(ECP)
构想的转换
-将重量型分配者变相固定以便轻松地完成任务SEIKO EPSON CORPORATION FA機器部
RS3系列特长 【1】
顶棚式安装&采用回旋臂
顶棚安装 ⇒ 省空间,动作范围大! 回旋臂 ⇒ 全方位最适合的距离移动,缩短任务时间!
第一机械臂 第二机械臂 新结构:
第一机械臂
第二机械臂
在第一机械臂下加装第二机械臂
SEIKO EPSON CORPORATION FA機器部
通过最短距离的移动使任务时间缩短
图像处理附件
SEIKO EPSON CORPORATION FA機器部
图像处理附件 (Vision Guide)
与机械手开发环境的整合・・・
RC+图像处理附件
・在同一画面中 通过简单的系统构成, 即可实现对机械手及视觉系统的双重操作。
校准及导向功能 (机械手与相机坐标的对位)
功能强大的视觉系统 --- 选配件 ---
爱普生机器人原点校准方法

EPSON机械手脉冲零点校正之青柳念文创作一、工具:钢板尺(或卡尺)、EPSON机械手编程软件RC+5.0等.二、应用场合:1.当机械手和驱动器的型号及序列号纷歧致时,即机械手和分歧序列号的节制器混搭使用,需要重新校准机械手的位置(重新校准机械手脉冲零位).2.更换马达等其他问题.三、机械手脉冲零点位置校正:详细调节步调如下:1.裁撤机械手丝杆上夹具,同时包管机械手有足够运动空间,用RC+5.0软件毗连机械手LS3,在软件中打开机器人管理器,如下图所示:.点击“motor on”按钮,即给机械手上电;接着点击“释放所有”按钮,即释放机械手4个伺服马达刹车;详细如图:2.点击“motor on”按钮,即给机械手上电;接着点击“释放所有”按钮,即释放机械手4个伺服马达刹车;详细如图:3.手动将机械手调整到脉冲零点位置;如下图所示:+Z方向+X方向+Y方向详细细节:1)因为刹车释放后,手动可以拖动J1与J2轴,手动拖动使J1与J2轴如下图所示:2)同理,手动移动丝杆使3、4轴如图所示:( U轴0位,丝杆端面临应外套上的指针;丝杆底部端面到机体底部为75mm,用钢尺量,相差在2mm内可承受.)3.坚持机械手今朝手动零点位置不动,先点击“锁定所有”按钮,即锁定机械手伺服马达刹车;接着点击“motor off”按钮,即关闭机械手;详细如图:4. 坚持机械手今朝手动零点位置不动,手动将机械手内编码器重置,详细是在软件中打开饬令窗口(ctrl+M)中输入:Encreset 1 按回车Encreset 2按回车Encreset 3按回车Encreset 3,4按回车如图:5. 坚持机械手今朝手动零点位置不动,重启节制器,详细操纵如图:6. 坚持机械手今朝手动零点位置不动,在饬令窗口中输入Calpls(脉冲零点位置的正确脉冲值)回车,详细如下:Calpls 0,0,0,0 回车.如下图:8.坚持机械手今朝手动零点位置不动,保管各个轴当前的脉冲值,详细是在软件中打开饬令窗口(ctrl+M)中输入:calib 1 按回车 1轴calib 2按回车 2轴calib 3按回车 3轴calib 3,4按回车 4轴(如只需校第一轴,calib 1即可,以上将4个轴都校正)机械手脉冲零点的脉冲保管完成,效正基本完成.7.坚持机械手今朝手动零点位置不动,打开机器人管理器,点击motor on后,在步进示教可看到如下界面:其当前世界坐标值x:400 y:0 z:0 u:0当前关节及脉冲值均为0,8.验证,将机械手的位置移动,是x、y、z、u的值均有很大变更后,在软件打开饬令窗口(ctrl+M)中输入:pulse 0,0,0,0 回车.此时机械手会自动回到刚校正的脉冲原点位置.。
EPSON LS系列机械手机械原点校准

LS3-401S
LS3-401C
LS6-601S
LS6-602C
6
一、LS系列机械原点调整
1.5 第四轴原点位置,将第二轴前端三角与Z轴平面中心对齐
7
二、原点校准
2.1 先将机械手按照上一节所叙将各轴移动到机械原点处,使机械手呈现如下 姿态,并保持此姿态不变
8
二、原点校准
2.2 打开EPSON软件,连接控制器,先在“工具”
Jump P2 /L
13
结束
谢谢
14
Hofs Hofs (1), Hofs (2) + (Ppls(P1,2) + Ppls(P2,2)) /2, Hofs(3), Hofs(4)
3. 执行完精确校准后,将机械手以右手姿势保存当前点到P2并保存,然后手动将机械 手姿势切换到左手姿势(如果机械手运动范围内可以自动切换姿势可以不用手动切换 姿势,如果有障碍时一定要切换姿势,否则切换姿势时可能会撞到其他设备),然后 再执行以下指令以左手姿势移动到P2点,看机械手末端是否与十字叉重合,如果重 合说明左右手校准成功,如果不重合说明校准有问题重新示教P1、P2点再次校准。
11
四、左右手精确校准
3.1 准备一个带针尖的夹具装到丝杆上,使针尖与丝杆中心同心,并在工作面 上画一个小十字叉,如下图所示: (对于有高精度矩阵或跟视觉配合做 高精度定位时,如果原点丢失进行校准时必须先按照第二章所叙做初略校准 然后再进行左右手精确校准)
12
四、左右手精确校准
2. 移动机械手用左手姿势对正工作面上的十字叉,并将该点示教到P1点,然 后切换到右手姿势对正对正工作面上的十字叉,并将该点示教到P2点。然后 在“命令窗口”执行如下指令后按回车(注意一次精确校准此命令只能输一 次,下一次精确校准时要重新示教P1、P2点)
爱普生机器人原点校准方法

爱普生机器人原点校准方法首先,我们需要准备以下工具和材料:1.爱普生机器人2.计算机B数据线4.电源适配器接下来,按照以下步骤进行原点校准:步骤1:连接机器人和计算机使用USB数据线将机器人连接到计算机上。
确保连接稳定,并将机器人连接到电源适配器上进行供电。
步骤2:打开调试工具步骤3:选择机器人模式在调试工具中选择适当的机器人模式。
爱普生机器人通常提供多种模式,如教学模式、追随模式等。
根据需要选择正确的模式。
步骤4:选择校准模式在调试工具中选择原点校准模式。
这通常可以在调试工具的菜单栏或工具栏中找到。
步骤5:开始校准在校准模式下,根据调试工具的指引进行校准。
通常,校准包括机器人的动作、灵敏度、传感器等多个方面。
根据提示逐步进行校准,确保每一步都准确无误。
步骤6:保存校准结果在校准完成后,将校准结果保存到机器人的内存中。
这通常可以通过调试工具的保存功能来实现。
步骤7:测试校准结果完成校准后,将机器人从计算机中断开连接,并进行测试。
通过测试,可以确保机器人的动作和行为与期望一致。
以上便是爱普生机器人的原点校准方法。
通过以上步骤进行校准,可以确保机器人的动作准确可靠,提升其整体性能和使用体验。
同时,我们还要提醒几个注意事项:1.在进行原点校准时,确保机器人和计算机之间的连接稳定,以免校准过程中出现问题。
2.在校准过程中,仔细阅读和遵循调试工具的指引,确保操作正确。
3.在校准完成后,及时保存校准结果,并进行测试以验证校准效果。
希望以上内容对您有所帮助!。
Epson机器人中文说明书

关于教材ii
注意ii
咨询ii
第1章1.与机器人相关的基础知识1
接受机器人培训的意义1
劳动安全卫生法1
劳动安全卫生规则2
安全卫生特别教育规定3
工业机械手的定义15
工业机械手的分类15
一般分类15
从控制来分类16
从动作机构来分类16
关于坐标系17
机械手坐标系17
水平多关节型机械手17
If…Then…Else77
Call79
子程序79
Do…Loop81
Print82
Input82
Print #83
Input #83
Cls84
第9章9.Pallet85
Pallet的定义85
Pallet内的位置确定86
第10章10.并列处理88
第11章11.多重任务90
Xqt90
任务暂停,继续实行,结束91
工业机械手的种类、各部分的机能以及处理方法
2小时
工业机械手教示等作业的相关知识
教示等的作业方法、教示等的作业危险性、关联机能等的连动方法
4小时
相关法令
法令以及安全卫生法则中的相关条例
1小时
③第1项的实际技能教育,有关以下各号列举的科目,要进行符合各号所列举的时间以上的教育。
1工业机械手的操作方法1小时
速度设定命令63
PTP动作命令的速度设定63
CP动作命令的速度设定64
变更机械手速度的程序65
Jump命令的修饰66
拱形运动66
Z轴上限值的指定67
指令窗口68
第7章7. I/O69
输入输出控制69
输出69
输入72