第三课 让机器人左转和右转
机器人遥控操作说明书
机器人遥控操作说明书操作部分:一、遥控器外观遥控器为方形设计,尺寸为15cm x 10cm,颜色为黑色。
遥控器正面有一个LCD显示屏,显示机器人工作状态以及相关提示信息。
遥控器上方有一排功能按键,包括电源开关、前进、后退、左转、右转、停止等基本操作按键。
遥控器侧面设有一个充电接口,用于给遥控器充电。
二、遥控器指示灯说明在遥控器正面,有三个指示灯,分别为电量指示灯、连接指示灯和工作指示灯。
电量指示灯用于显示遥控器的电量剩余情况,绿色表示剩余电量充足,红色表示电量即将耗尽需要充电。
连接指示灯用于显示遥控器与机器人的连接状态,蓝色表示连接正常,红色表示连接异常。
工作指示灯用于显示机器人的工作状态,绿色表示机器人正常工作,红色表示机器人停止工作。
三、遥控器电源开关遥控器侧面的电源开关用于控制遥控器的开关机。
打开遥控器电源开关后,电量指示灯会亮起,显示遥控器的电量情况。
关闭电源开关后,遥控器将无法使用,同时电量指示灯熄灭。
四、基本操作说明1. 前进:按下遥控器上的“前进”按键,机器人将向前直线行驶,持续按下可加快机器人前进速度。
2. 后退:按下遥控器上的“后退”按键,机器人将向后直线行驶,持续按下可加快机器人后退速度。
3. 左转:按下遥控器上的“左转”按键,机器人将左转一个固定角度,持续按下可使机器人持续左转。
4. 右转:按下遥控器上的“右转”按键,机器人将右转一个固定角度,持续按下可使机器人持续右转。
5. 停止:按下遥控器上的“停止”按键,机器人将停止当前的行动,处于静止状态。
五、其他功能说明1. 摄像头控制:通过遥控器上的十字方向键,可以控制机器人上的摄像头的转动方向,帮助操作者观察机器人周围的环境。
2. 声音控制:遥控器上设有音量加减按键,可以控制机器人内置喇叭的音量大小,方便与人进行语音交流。
3. 语音控制:遥控器上设有语音输入按钮,按下后可以进行语音指令输入,机器人通过语音识别技术执行相应的操作。
三指平板操作方法
三指平板操作方法
三指平板操作方法是一种机器人控制方式,可以用来进行手部姿势识别和控制机器人的运动。
具体操作方法如下:
1. 三指伸展:将三个手指分开,使它们与手掌保持一定的距离。
这个手势可以被识别为机器人的启动命令。
2. 前进:将手掌沿着机器人所需的前进方向移动。
机器人将会根据手掌的移动方向和速度加速或减速前进。
3. 后退:将手掌沿着机器人所需的后退方向移动。
机器人将会根据手掌的移动方向和速度加速或减速后退。
4. 左转:将手掌向左侧移动,机器人将会根据手掌的移动距离和速度左转。
5. 右转:将手掌向右侧移动,机器人将会根据手掌的移动距离和速度右转。
6. 停止:将手掌放平,机器人将停止前进、后退、左转或右转。
需要注意的是,这些操作方法可能因不同的机器人系统而有所不同。
在使用三指平板操作之前,需要仔细阅读并遵循机器人的操作说明和使用手册。
机器人操作指南说明书
机器人操作指南说明书第一章:简介1.1 产品概述本机器人是一款拥有先进人工智能技术的智能助手,它可以执行各种任务,并提供人性化的交互体验。
1.2 产品特点- 强大的处理能力:机器人搭载了高性能处理器和先进的算法,能够快速地完成各种任务。
- 多功能操作:机器人具备多种操作功能,包括语音识别、图像识别、行动控制等。
- 友好的交互界面:机器人拥有简洁直观的用户界面,便于用户进行操作和设定。
- 持久的续航能力:机器人内置高容量电池,可以持续工作多小时。
第二章:使用前准备2.1 开箱检查- 请仔细检查包装,确保机器人及配件完整无损。
- 请确认机器人电池已经充满电,以保证正常的使用时间。
2.2 电源连接- 使用配套的电源适配器将机器人连接至电源插座。
- 确保电源适配器和电源插座的连接稳固可靠。
第三章:机器人操作指南3.1 语音交互- 在机器人开机后,开启语音模式。
- 通过说出特定指令,机器人将根据用户需求执行相应任务。
3.2 图像识别- 机器人内置摄像头,可进行图像识别。
- 用户可以通过显示特定物体或图像,让机器人执行对应操作。
3.3 行动控制- 机器人可以通过操作相关按钮或设置指令,进行行动控制。
- 用户可以让机器人前进、后退、左转、右转等。
3.4 任务设定- 机器人支持设定多个任务。
- 用户可以通过输入指令或点击设定任务按钮,按照需求设定任务列表。
第四章:注意事项4.1 安全操作- 在使用机器人时,请确保周围环境干净整洁,避免机器人受到物体的干扰。
- 请勿将机器人擦拭进水,以免发生电路短路。
4.2 维护保养- 定期清洁机器人外壳和摄像头,保持良好的工作状态。
- 如发现机器人出现异常情况,请及时联系售后服务人员。
第五章:故障处理5.1 常见问题- 机器人无法开机:请检查电源是否连接正常,是否充满电。
- 机器人无法识别语音指令:请检查语音输入是否清晰,是否按照指令操作。
5.2 联系售后- 如无法解决故障,请联系售后服务人员寻求帮助。
NACHI那智机器人资料(操作篇)

03
那智机器人高级操作
网络连接与远程控制
连接方式
那智机器人支持多种网络 连接方式,包括Wi-Fi、蓝 牙和有线连接,以满足不 同场景的需求。
远程控制
通过手机应用程序或电脑 软件,用户可以远程控制 那智机器人,实现远程操 控和实时监控。
网络设置
用户需要正确设置网络参 数,包括SSID、密码、IP 地址等,以确保那智机器 人能够成功连接到网络。
移动指令
控制那智机器人在平面内进行 移动,包括前进、后退、左转
、右转等基本动作。
传感器指令
读取那智机器人搭载的传感器 数据,如光电传感器、触碰传 感器等,实现感知外界环境的 功能。
执行器指令
控制那智机器人的执行器,如 机械臂、夹爪等,实现抓取、 搬运等操作。
通信指令
实现那智机器人与计算机或其 他设备之间的数据通信,包括
nachi那智机器人资 料(操作篇)
• 那智机器人基础操作 • 那智机器人编程操作 • 那智机器人高级操作 • 那智机器人维护与保养目录Leabharlann 01那智机器人基础操作
开机与关机
开机
按下机器人正面的电源按钮,等 待机器人启动并完成自检。
关机
按下机器人正面的电源按钮,等 待机器人关闭并断开电源。
基础移动操作
前进
按下遥控器的“前进” 按钮,机器人将向前移
动。
后退
按下遥控器的“后退” 按钮,机器人将向后移
动。
左转
按下遥控器的“左转” 按钮,机器人将向左旋
转。
右转
按下遥控器的“右转” 按钮,机器人将向右旋
转。
工具更换与设置
工具更换
根据需要,选择适合的工具并安装到 机器人上。
熊猫机器人使用说明
熊猫机器人使用说明
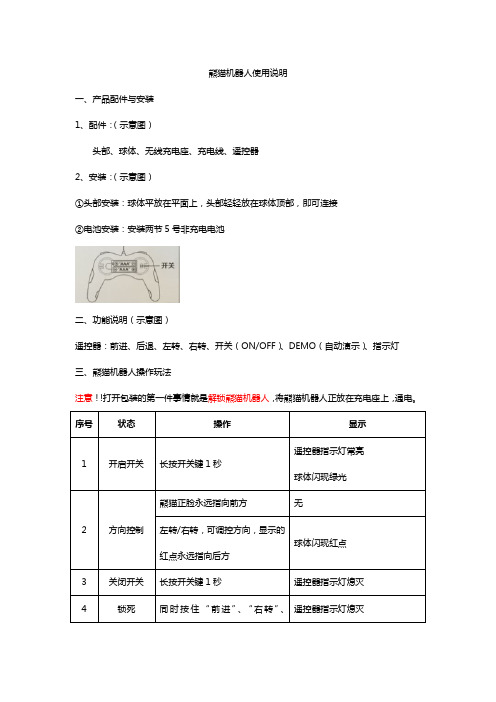
一、产品配件与安装
1、配件:(示意图)
头部、球体、无线充电座、充电线、遥控器
2、安装:(示意图)
①头部安装:球体平放在平面上,头部轻轻放在球体顶部,即可连接
②电池安装:安装两节5号非充电电池
二、功能说明(示意图)
遥控器:前进、后退、左转、右转、开关(ON/OFF)、DEMO(自动演示)、指示灯三、熊猫机器人操作玩法
注意!!打开包装的第一件事情就是解锁熊猫机器人,将熊猫机器人正放在充电座上,通电。
四、产品特点说明
1、为了防止运输中按到开关键,熊猫机器人初始状态为锁死状态,必须解锁才能完毕!
2、行走过程中偶尔出现头部掉落,请将头部按说明安放即可继续玩耍。
3、熊猫机器人在自动演示时,可以按任意键停下
4、电池刚充满开始玩耍时电压稍高,熊猫机器人处于暴走状态,这时可以先打圈圈进行热身运动。
五、常见问题和保养
六、注意事项
1、电力不足请将控制距离缩短
2、电力不足将导致机器人行走困难
3、如果不使用,请取下遥控器电池
4、请在光滑无沙尘的地面或者地毯上行走,以免损伤球体表面护层
5、机体电池盖螺丝若无锁紧,造成电池盖凸起,将影响机器人行走。
第三课 循环嵌套 VJC仿真环境下机器人走不规则图形
开始 左转300 3次循环 前进 右转1200
结束
120°
30° 120°
120°
120°
120°
120°
要完成这个“走一大三 小的正三角形”轨迹程 序,需要做多少个“走 一个小正三角形,然后 左转120度,再走大 三角形的一条边”的动 作?
机器人完成三个“小正三角形”, 需要 3次循环模块,称为内循环。
而我们 要完成走一大三小的正三角形” 轨迹程序,需要 3次走一个小正三角形,然后 左转120度,再走大三角形的 一条边的动作。 也就是说,走一个小正三角形, 然后左转120度,再走大三角 形的一条边的动作是3次循环 模块的循环体。 而3次循环模块,称为外循环
从流程图中可以看出:
外循环执行一次,内循 环就执行3次,当我们 走完一大三小的正三 角形”轨迹程序, 外循环执行了3次, 内循环总共执行了多少次?
Y轴
1200
600
600
1200
X 300
1200 A
X轴
如果机器人在上图A点处,要使机器人先沿X边行走直至 走完全部三角形,你该怎么办?
果机器人在下图A点处,要使机器人先沿X边行走 直至走完全部正方形,你该怎么办?要求机器人右 转900的参数为(V=80,S=0.298)。
X 450 A
1. V=-80 S=0.14秒 2.V=-10 S=1.242秒
Y轴
1200
600
600
1200
X 300
1200 A
X轴
如果机器人在上图A点处,要使机器人先沿X边行走直至 走完全部三角形,你该怎么办?
1.V=-8 S=1.1秒 2.V=-80 S=0.11秒 3.V=-4 S=2.119秒
机器人-编程教学--右转左转转弯的特训
点一下跟你的Rainbow 一样代号的文字。
显示「已联机」就代表你已经可 以跟你 的Rainbow沟通啰!
点选APP图标
检 查 连 接
显示Connect就代表Rainbow 已经准备好和你沟通啰!
按下「开始游戏」,准备 和Rainbow一起玩耍吧!
大家准备好 和我互动了吗?
操控界面
4.1 软件介绍
4.3 认识操作界面
如何控制 Rainbow移动 ?
体感操控:按下这个键后,将平板倾 斜至 Rainbow要移动的方向
前
右
后
左
4.3 认识操作界面
大家知道哪里可 以控制速度吗?
4.3 认识操作界面
小朋友一起动手 试一试,体验我 速度的威力吧!
如何控制Rainbow移动 ? 控制速度:按下兔子就会变快;按下乌龟就 会变慢
这是我的等级,每升 一级就会有惊喜喔!
Rainbow颜色
方向矫正
体感按钮 设定 任务
动作 速度
4.2 了解体感操控的含义
在于人们可以很直接地使用肢体动作,而无需使用任何 复杂的控制设备,便可与周边的装置或环境做互动。
4.3 认识操作界面
如何知道Rainbow 的头和屁股的方向 在哪里呢?
矫正方向:
步骤3 完成
5.6 几个拼图介绍
当开始执行时
向右转90度
以50%的 速度移动1秒
5.7 操控游戏设置
游戏时间-绕过狗狗 游戏规则
老师将发下任务给小朋友们,请小朋友们跟老师学习如何帮 助机器人规划路线才不会撞到正在休息的狗狗!
游戏准备
迷宫学习单、大图道具。
通过学习,你还能编 出更有趣的玩法吗?
』按钮就会触发的拼图 按下 就会执行连接这块拼图的事件
打令小宝操作
1.语音识别1.1语音唤醒机器人耳朵圈灯灭时为休眠状态,需要说”小宝小宝”唤醒它,此时机器人耳朵圈为绿色,即可通过语音命令控制机器人,在联网状态下还可以和它聊天。
1.2语音命令带唤醒词的命令可以被机器人直接响应,如”小宝小宝,播放音乐”;不带唤醒词的命令只有在唤醒状态下才能做出响应,如”播放音乐”。
1.3控制命令2.机器人设置2.1无线和网络2.1.1 Wi-Fi连接WiFi,可以上网,相当于一个平板电脑,或者说就是一个平板电脑。
2.1.2蓝牙可以连接蓝牙设备,传输数据。
2.2设备2.2.1显示与亮度调节屏幕亮度。
2.2.2声音可以调节音乐、视频、游戏和其他媒体以及警报的音量。
2.2.3机器人设置2.2.3.1面部选择一共三种面部:小男孩、小女孩和小猫。
2.2.3.2语言选择分为:卡通、标准男生、标准女生、粤语、东北话、四川话。
2.2.3.3语音唤醒灵敏度这个可以根据实际情况选择相应的等级,灵敏度越高误唤醒越高。
灵敏度等级:极地、低、中、高、极高。
2.2.3.4返回屏保时间返回屏保的时间有四个时间段:24秒、1分钟、5分钟、永不。
2.2.3.5黑线过滤设有开关按钮。
2.2.3.6人体检测设有开关按钮。
2.2.3.7机器人主动问好设有开关按钮。
2.2.3.8唤醒进入对话界面设有开关按钮。
2.2.3.9应用市场自动更新是否自动更新已安装的应用,设有开关按钮。
2.2.3.10语速调节机器人说话速度。
2.2.3.11语调调节机器人说话语调,调到适合自己的语调。
2.2.3.12语音音量调解机器人说话音量。
2.2.4电池2.2.4.1是否自动充电设有是否自动充电按钮。
2.2.4.2运行模式分为两种:性能模式和省电模式。
2.2.5 LED灯可以调节led灯亮度:节能、柔和、明亮。
2.3系统2.3.1时间设置可以选择时区、日期格式、24小时制、使用网络自动校时等操作。
2.3.2语言与输入法目前本机好像只支持中文简体语言和搜狗输入法TV版。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
课题: 让机器人左转和右转;让机器人走正多边形路线
第3课
一、教学目标
1、初步感知控制机器人的方式及特点。
2、培养学生对机器人的兴趣,以至产生对科学浓厚的
兴趣。
二、 教学重难点
理解操纵机器人的方式,感知计算机语言的特点。
三、教学准备 通用机器人程序
教学过程 修 改
一、复习导入
通过上节课的学习我们基本了解了“通用机器
人”程序,同学们都能够熟练运用前进、后退命令让
小海龟按我们的要求前进、后退,但还是不够灵活,
我们以前学过的LOGO命令还有很多,能不能让小
海龟转向呢?走出各种各样的路线呢?
二、探究新知
在体育课上走队列时,我们经常需要向左转和向
右转,那么怎样让机器人左转和右转呢?
1、回忆LOGO命令
左转 LT 右转 RT
2、编写LOGO语言命令,让机器人左转和右转
第1步:打开“通用机器人LOGO语言”窗口
第2步:单击“LOGO语言下传过程名”
第3步:在“LOGO语言下传过程名”输入命令:
FD 100
LT 90
BK 100
RT 90
FD 100
执行这几条命令,会有什么结果?
可以让机器人前进100步,左转90度,后退100
步,右转90度,前进100步
第4步:单击“确定”按钮,在弹出的仿真窗口
中单击“试运行”按钮,让机器人运行。
第5步:单击“停止”按钮,然后单击“关闭”
按钮,关闭仿真窗口。
3、试试看,让机器人后退100步,右转45度,
前进100步,左转45度,前进100步,左转90度,
前进100步。
学生独立练习
展示
4、让机器人走正多形路线
如果我们需要使用重复命令,让机器人走出各种
各样的正多边形路线。
做一做:编写LOGO语言命令,让机器人走一
个每一边的长度为100步的正三角形路线。
第1步:打开“通用机器人”窗口
第2步:单击“下传过程名”对话框
第3步:在对话框中输入命令
REPEAT 3[FD 100 RT 120]
第4步:单击对话框中的“确定”按钮,在弹出
的仿真窗口中单击“试运行”按钮,让机器人运行。
第5步:单击“停止”按钮,然后单击“关闭”
按钮,关闭仿真窗口。
三、巩固练习:让机器人走一个每一边长度为
120步的正五边形的图形。
板
书
设
计