(完整版)交通流理论第二章

第二章 交通流特性
第一节 交通调查
交通调查:在道路系统的选定点或选定路段,为了收集有关车辆(或行人)运行情况的数据而进行的调查分析工作。
意义:交通调查对搞好交通规划、道路设施建设和交通管理等都是十分重要的。
调查方法:
(1)定点调查;
(2)小距离调查(距离小于10m );
(3)沿路段长度调查(路段长度至少为500m ); (4)浮动观测车调查; (5)ITS 区域调查。
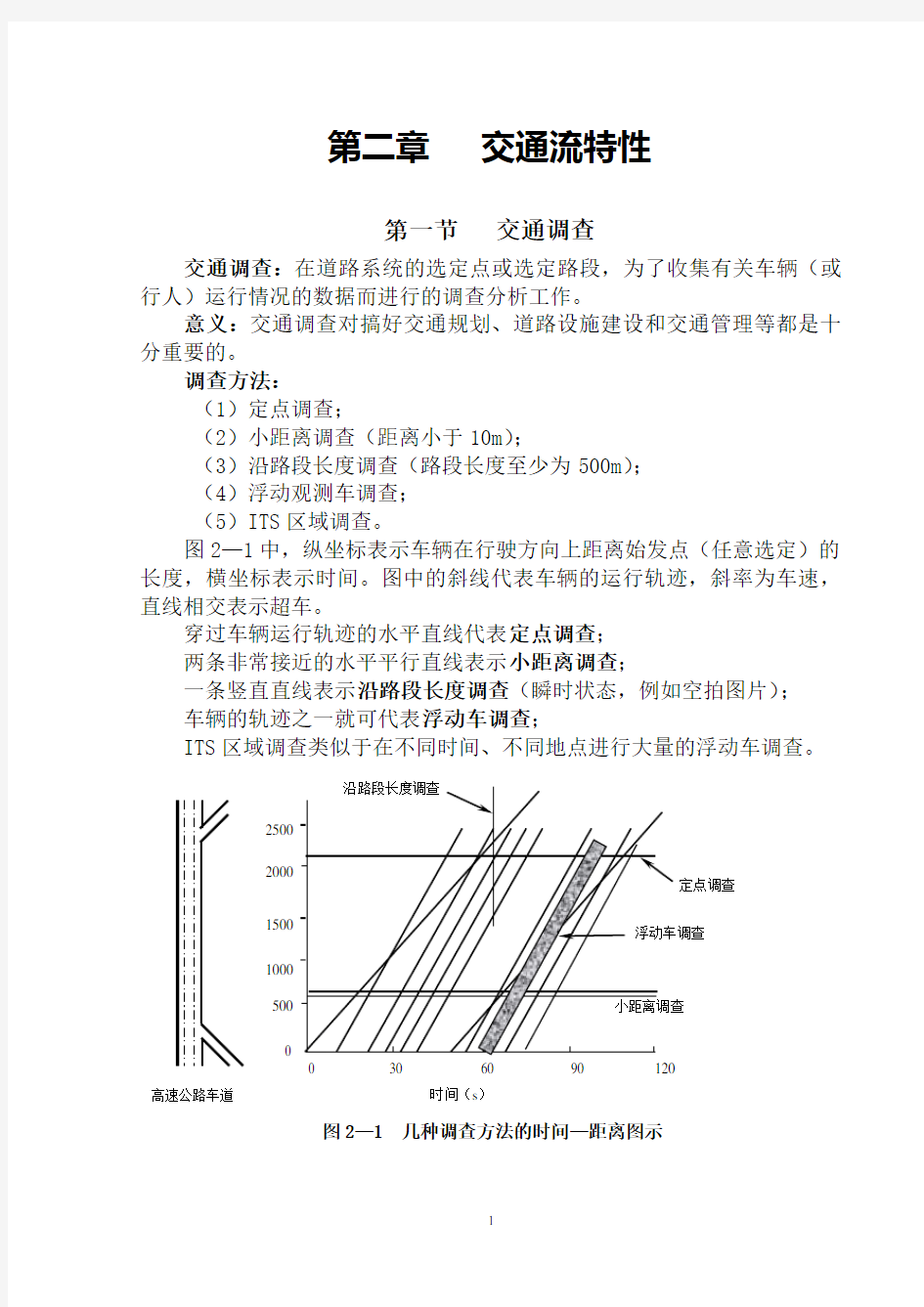
图2—1中,纵坐标表示车辆在行驶方向上距离始发点(任意选定)的长度,横坐标表示时间。图中的斜线代表车辆的运行轨迹,斜率为车速,直线相交表示超车。
穿过车辆运行轨迹的水平直线代表定点调查; 两条非常接近的水平平行直线表示小距离调查;
一条竖直直线表示沿路段长度调查(瞬时状态,例如空拍图片); 车辆的轨迹之一就可代表浮动车调查;
ITS 区域调查类似于在不同时间、不同地点进行大量的浮动车调查。
图2—1 几种调查方法的时间—距离图示
时间(s )
距离(m )
高速公路车道
一、定点调查
定点调查包括人工调查和机械调查两种。
人工调查方法即选定一观测点,用秒表记录经过该点的车辆数。
机械调查方法常用的有自动计数器调查、雷达调查、摄像机调查等。
自动计数器调查法使用的仪器有电感式、环形线圈式、超声波式等检测仪器,它几乎适用于各种交通条件,特别是需要长期连续性调查的路段。
雷达调查法适用于车速高、交通量密度不大的情况。
摄像机调查法一般将摄像机安装在观测点附近的高空处,将镜头对准观测点,每隔一定的时间,如15s、30s、45s或60s,自动拍照一次,根据自动拍摄的照片上车辆位置的变化,清点出不同流向的交通量。这种方法可以获得较完全的交通资料,如流量、流向、自行车流及行人流和行驶速度、车头时距及延误等。
除这些方法以外,还有航空摄影调查法、光电管调查法等。
定点调查能直接得到流量、速度和车头时距的有关数据,但是无法测得密度。
二、小距离调查
这种调查使用成对的检测器(相隔5m或6m)来获得流量、速度和车头时距等数据。
目前常用的点式检测器,如感应线圈和微波束。调查地点车速时,将前后相隔一定距离(如5m)的检测器埋设地下,车辆经过两个检测器时发出信号并传送给记录仪,记录仪记录车辆通过两个检测器所使用的时间,那么用相隔的距离除以时间就得到地点车速。
这种调查方法还能得到占有率,占有率是指检测区域内车辆通过检测器的时间占观测总时间的百分比。由于占有率与检测区域的大小、检测器的性质和结构有关,因此同样的交通状态下,不同位置测得的占有率可能不同。
小距离调查同样无法测得密度,但可获得流量、速度、车头时距和占有率等数据。
三、沿路段长度调查
沿路段长度调查主要是指摄像调查法,适用于500m以上的较长路段。
摄像调查法首先对观测路段进行连续照像,然后在所拍摄的照片上直
接点数车辆数,因此这种方法是调查密度的最准确途径。但是,由于拍摄胶片的清晰度受天气情况影响较大,调查时应注意选择晴朗的时间。
摄像调查法分为地面高点摄像法和航空摄像法。
这种方法能够测得密度,但由于调查中没有给出时间刻度,因此不能得到流量和速度。
四、浮动车调查
浮动观测车调查有两种方法:
第一种方法:是利用浮动车记录速度和行程时间(分别作为时间和沿路段位置的函数),浮动车以车流的近似平均速度行驶。该方法无需精密的仪器就可获得大量有关高速公路车流运动的信息,但是不能获得准确的平均速度。这种方法有两种常用的形式:一种是人在车上记录速度和行程时间;另一种是使用速度计(通常用于远距离行驶的卡车和公共汽车上)。
第二种方法:可同时进行速度和流量的调查,该方法适用于不拥挤的道路和无自动检测仪器的郊区高速公路。这种调查方法基于观测车在道路上
进行往返行驶,其计算流量和速度的公式如下:
)/()(w a t t y x q ++= (2—1) q y t t w /-= (2—2)
t l u s /= (2—3)
式中:q ——道路上参考方向的估计交通量;
x ——观测车沿参考方向反向行驶时遇到的车辆数;
y ——观测车沿参考方向行驶时的净超车数(即超越观测车的车辆数减去被观测车超越的车辆数);
a t ——车辆沿参考方向反向行驶时的行程时间; w t ——车辆沿参考方向行驶时的行程时间;
t ——车辆沿参考方向行驶时的平均行程时间的估计值; l ——路段长度;
s u ——区间平均速度。
进行调查时,驾驶员应事先固定行程时间,试验中要按照这个时间行驶,沿路段允许停车,但要保证整个行程时间跟预定的时间相等。总的行程时间,根据美国国家城市运输委员会的规定,主要道路为19min/km ,次要道路为6min/km ,一般往返12~16次,即可得到满意的结果。另外,转弯车辆(离开和进入)会影响计算结果,因此进行这种调查所选择的路段应该尽量避开主要的进出口。
五、ITS 区域调查
智能运输系统包含诱导车辆与中枢系统的通信技术,这可提供车辆的
速度信息。但是,通过智能运输系统获得的车速信息有的情况是记录点的瞬时速度,有的情况仅是车辆的标识信号(系统根据接收的相邻信号计算出车辆的行程时间),还有的情况是通过一些固定于路旁的信号发射装置(通常称为信标)向车辆发送信号,车辆接收信号进行登记,并向中枢系统返回速度和位置信息。
该方法只能提供速度信息,而无法确定车辆所在路段的流量和密度。如果配以适当的传感器,每一辆诱导车都能记录车头时距和车头间距,那么就可以通过这些数据求得流量和密度。
第二节 交通流参数
道路上的行人或运行的车辆构成行人流或车流,行人流和车流通称为交通流,没有特指时交通流一般指机动车流。
交通流运行状态的定性、定量特征称为交通流特性,用以描述交通流特性的一些物理量称为交通流参数,参数的变化规律即反映了交通流的基本性质。
交通流的基本参数有三个:交通流量、速度和密集度,也称为交通流三要素,常用的参数还有车头时距、车头间距等。
一、流 量
流量是指在单位时间内,通过道路某一点、某一断面或某一条车道的交通实体数(对于机动车流而言就是车辆数)。流量可通过定点调查直接获
得,流量和车头时距有以下关系:
T
N
q = (2—4)
式中:q ——流量(veh/h );
T ——观测时段长度;
N ——观测时段内的车辆数。
观测时段长度和车头时距有如下关系:
∑==N
i i h T 1 (2—
5)
式中:i h —— 第1+i 辆车与第i 辆车的车头时距。
将式(2—5)代入式(2—4),就得到流量和平均车头时距之间的关系:
h
h N h N T N q i
i i
i 1
11====
∑∑ (2—
6)
式中:h ——平均车头时距。
二、速 度
1.地点速度(也称为即时速度、瞬时速度)
地点速度u 为车辆通过道路某一点时的速度,公式为:
1
212012lim t t x x dt dx
u t t --==
→- (2—7) 式中1x 和2x 分别为时刻1t 和2t 的车辆位置。雷达和微波调查的速度非常接近此定义。车辆地点速度的近似值也可以通过小路段调查获得(通过间隔一定距离的感应线圈来调查)。
2.平均速度
(1)时间平均速度t u ,就是观测时间内通过道路某断面所有车辆地点速度的算术平均值:
∑==N
i i t u N u 1
1 (2—8)
式中:i u ——第i 辆车的地点速度;
N ——观测的车辆数。 (2)区间平均速度s u ,有两种定义:一种定义为车辆行驶一定距离D 与该距离对应的平均行驶时间的商:
∑==
N
i i
s t
N
D u 1
1 (2—9)
式中:i t ——车辆i 行驶距离D 所用的行驶时间。
i
i u D
t =
(2—10) 式中:i u ——车辆i 行驶距离D 的行驶速度。
式(2—9)适用于交通量较小的条件,所观察的车辆应具有随机性。对式(2—9)进行如下变形:
∑∑∑=
=
=
i i
i i
t
i
s u N u D N D t
N
D u 11
111 (2—11)
此式表明区间平均速度是观测路段内所有车辆行驶速度的调和平均值。
区间平均速度的另一种定义为某一时刻路段上所有车辆地点速度的平均值。可通过沿路段长度调查法得到:以很短时间间隔t ?对路段进行两次(或多次)航空摄像,据此得到所有车辆的地点速度(近似值)和区间平均速度,公式如下:
t S u i
i ?= (2—12)
∑∑==?=?=N
i i N i i s S t N t S N u 1
111 (2—13)
式中:i u ——第i 辆车平均速度;
t ?——两张照片的时间间隔;
i S ——在t ?间隔内,第i 辆车行驶的距离。
研究表明,这种方法获得的速度观测值的统计分布与实际速度的分布是相同的。
(3)时间平均速度和区间平均速度的关系
对于非连续交通流,例如含有信号控制交叉口的路段或严重拥挤的高速公路上,区分这两种平均速度尤为重要,而对于自由流,区分这两种平均速度意义不大。当道路上车辆的速度变化很大时,这两种平均速度的差别非常大。时间平均速度和区间平均速度的关系如下:
s
s s t u u u 2
σ=
- (2—14)
式中:K u u k s i i s /)(22∑-=σ;
i k ——第i 股交通流的密度; K ——交通流的整体密度。
三、密集度
密集度(concentration )包括占有率和密度两种含义。
(一)占有率
占有率o 即车辆的时间密集度,就是在一定的观测时间T 内,车辆通过检测器时所占用的时间与观测总时间的比值。对于单个车辆来说,在检测器上花费的时间是由单个车辆的速度i u ,车长i l 和检测器本身的长度d 决定的:
∑∑∑+=+=i i
i i i i
i i u T d u l T T u d l o 11/)( (2—16)
将上式第二项的分子分母同时乘以N ,再将式(2—4)和式(2—11)代入可得:
s
i i i i i i i i u q
d u l T u N T N d u l T o ?+=??+=∑∑∑1111 (2—17) 将基本公式:
s u k q = (2—18)代入式(2—17):
k d u l T o i i
i ?+=∑1
(2—19)其中T 是车头时距的总和,k 为密度。将上式的分子分母同时除以N 得:
k d h
u l N k d h N
u l N k d T u l o i i i i
i i i i i i ?+=?+=?+=∑∑∑∑1`11 (2—20) 如果假定车身长度取定值l ,那么上式可简化为:
∑∑?+??=?+=i i i i k d u N l h
k d h u l N o 1111
k c k d l k d u q l k s
=+=?+?=)( (2—21) 式中:k c ——车身长度与检测器长度之和。
由于单个检测器的长度d 是恒定的, 如果假定车辆长度也相同,那么该式表明占有率与密度是成正比的,由此可得如下的区间平均速度计算公式:
o
c q u k
s ?= (2—22)
(二)密度
交通密度k 代表车辆的空间密集度,就是某一瞬间单位道路长度上存在的车辆数,即:
L K 观测路段长度车辆数交通密度N/=
密度只能通过沿路段长度调查法即根据航拍照片来获得:根据图上量得的距离和车辆数计算得出。若记i S 为第i 辆车与前车的车头间距,则:
i
i i i u h S k 11== (2—23)
式中:i h ——第i 辆车与前车(第1-i 辆车)的车头时距;
i u ——第i 辆车的车速。
那么平均密度如下:
∑=i S N
k 1
1
(2—24) 或者
∑==N i i
k N k 1111
(2—25)
式中:k ——平均交通密度;
N ——记录的车头间距数。
式(2—25)说明平均交通密度等于各股交通流密度的调和平均值。
第三节 交通流基本参数的关系模型
本节主要介绍交通流三要素:流量、速度、密集度之间的关系模型。这些模型包括:速度—流量模型、速度—密集度模型、流量—密集度模型,其中一些是基于数学模型建立的,另一些则是根据实践经验建立的。
一、速度—流量模型
(一)格林希尔治抛物线模型
该速度—流量抛物线模型是在格林希尔治(Greenshields )速度—密度的线性模型基础上得到的,是对速度—流量关系的最早研究,其公式如下:
???
?
?
?-
=f j u u
u k q 2 (2—62) 式中:f u ——自由流车速;
j k ——阻塞密度。
图2—8为该模型的图示,图中的数字为被观测车组(100辆车为一组)的数量,曲线表示单向两车道的速度—流量关系。从图中可以看到,速度和流量呈抛物线关系。通过最大流量点作一条水平线,直线上方为非拥挤区域,下方则为拥挤区域。在流量达到最大值之前,速度随流量的增加而下降;达到最大流量之后,速度和流量同时下降。
图2—8 格林希尔治速度—流量抛物线模型图示
从目前的研究看来,格林希尔治抛物线模型至少存在三个问题。首先,该模型并非利用高速公路的数据来进行研究的,然而后来不少研究者却直接将其应用于高速公路。其次,该模型将观测数据组相互交迭和分类,经研究表明这是不合理的。第三,该模型所做的交通调查是在假期进行的,不具备广泛的代表性。正是由于这三个原因,通过速度—密度的线性关系推导出的速度—流量关系与直接利用实际数据得出的速度—流量关系存在一定的偏差。
尽管如此,格林希尔治抛物线模型还是具有开创性意义的。它提出的速度—流量抛物线关系基本上反映了这两个参数的变化趋势,多年来一直被广泛采用,包括美国《道路通行能力手册》的1965年版和1985年版。该模型还提出了一种重要思想:只要确立了速度—密集度模型,速度—流量模型也可相应确定,这也是近年来相关研究的主要思路。
(二)其它模型及曲线
由于格林希尔治抛物线模型本身存在的一些问题,不少研究者直接根据观测数据来研究速度—流量关系。图2—9为美国1994年版《道路通行能力手册》中所采用的速度—流量曲线(图中单位pcphpl为car/h/lane,也即veh/h/lane),该图反映了开始时随着流量的增加速度保持不变,直到流量接近通行能力的二分之一或三分之二时,才开始有一个较小程度的下降。图中的曲线虽然不能通过确切的数学模型来描述,但我们从中可以清晰地归纳出两参数之间的关系。
二、速度—密度模型
(一)格林希尔治线性模型
格林希尔治速度—密度线性模型为经验模型,公式为:
()j f k k u u /1-= (2—63)
如图2—12所示,从图中可看出,当0=k 时,u 值可达理论最高速度即自由流速度f u 。直线上任意一点的纵坐标、横坐标与原点o 所围成的面积即为交通流量。
该图采用了与图2—8所示的格林希尔治抛物线模型相同的数据,因此存在与式(2—62)同样的问题。后来的研究者发现,尽管该模型在最初研究时所使用的数据存在一些问题,但是此模型对交通状况的描述还是可以接受的,而且其形式也很简单,因此一直被广泛采用。出于研究的需要,研究人员还提出了以下针对具体交通条件的模型。
(二)格林伯模型
格林伯(Greenberg )模型即对数模型:
)/ln(k k u u j m = (2—64)
式中m u 为流量最大时对应的车速,称为最佳车速。此模型和交通拥挤的数据很符合,适用于较大密度的交通条件,如图2—13所示;当交通密度较小时,这一模型不适用,这可以从式(2—64)中令k →0看出。
(三)安德伍德模型
安德伍德(Underwood )模型为:
m
k k f
e u u /-= (2—65) 式中m k 为流量最大时对应的密度,称为最佳密度。适用于较小密度的交通
条件,如图2—14所示,其中2r 为相关系数。
密度(veh/km )
图2—13 格林伯模型图示
速度(k m /h )
密度(veh/km ) 图2—14 安德伍德模型图示 区间平均速度(m i l e /h )
90.02.532
67/==-r e u k s
三、流量—密集度模型
(一)抛物线形的流量—密度模型
如果采用格林希尔治速度—密度模型,那么可以推导出如下的抛物线形流量—密度模型:
j f f j f k k u k u k k
ku ku q 2
)1(-
=-== (2—66)
为求最大流量,可令
0=dk
dq
,并定义m q 为最大流量或最佳流量,m k 为最大流量时的密度即最佳密度,m u 为最大流量时的速度即最佳速度,于是可
得:
2j
m k k =
2
f
m u u =
2/4/j m j f m k u k u q ==
图2—16所示为抛物线形的q —k 模型。图中曲线上任意一点的矢径的斜率表示该区段上的区间平均速度,切线的斜率表示流量微小变化的速度分布。
图2—16 抛物线形q —k 模型图示
(二)对数模型
1.适用于较大密度的模型
采用格林伯速度—密度模型(2—64)可以推出下式:
)/ln(k j k ku ku q m == (2—67)
并可求出:
e k k j m /=
m m u u =
e k u q j m m /=
图2—17为这种现场拟合的模型,图中/h 2.17英里=m u ,英里/228veh j k =。
2. 适用于较小密度的模型
如果采用安德伍德模型(2—65)可推导出下式: )/ex p(m f k k ku q -?= ( 2—68)
并求出:
e u k q
f m m /=
e u u
f m /=
m m k k =
图2—17 对数q —k 曲线
)/228ln(2.17k k q = k (veh/英里) q (veh/h)
第四节 交通流参数的统计分布
在设计新的交通设施或管制方案时,需要预测某些具体的交通特性,并且希望能使用现有的数据或假设的数据进行预测。
车辆的到达在某种程度上具有随机性,描述这种随机性分布规律的方法有两种:
一种是以概率论中描述可数事件统计特性的离散型分布为工具,考察在一段固定长度的时间或距离内到达某场所的交通数量的波动性;
另一种是以连续型分布为工具,研究车辆间隔时间、车速、可穿越空档等交通流参数的统计分布特性。
三种离散型分布:泊松(Poisson )分布、二项分布及负二项分布; 四种连续型分布:负指数分布、移位负指数分布、爱尔朗(Erlang )分布及韦布尔(Weibull )分布。
一、离散型分布
在一定时间间隔内到达的车辆数或在一定路段上分布的车辆数是随机数,这类随机数的统计规律可以用离散型分布进行描述。
(一)泊松分布
1.基本公式
Λ,2,1,0,!
)()(==
-x x e t x P t
x λλ (2—26) 式中:)(x P ——在计数间隔t 内到达x 辆车的概率;
λ——单位间隔的平均到达率;
t ——每个计数间隔时间(或路段长度)
; e ——自然对数的底,取2.71828。
若令t m λ=为在计数间隔t 内平均到达的车辆数,则式(2—26)可写为:
!
)(x e m x P m
x -= (2—27)
当m 为已知时,应用式(2—27)可求出在计数间隔t 内恰好有x 辆车到
达的概率。除此之外,还可计算出如下的概率值:
到达数小于等于k 的概率:
∑=-=≤k
i m
i i e m k x P 0
!)( (2—29)
到达数大于k 的概率:
∑=--=≤-=>k
i m
i i e m k x P k x P 0
!1)(1)( (2—30)
到达数至少是l 但不超过n 的概率:
∑=-=≤≤n
l
i m
i i e m n i l P !)( (2—32)
用泊松分布拟合观测数据时,参数m 按下式计算: N
f k
f
f k
m g
j j
j
g j j
g
j j
j
∑∑∑====
=
=
1
1
1观测的总车辆数总计间隔数
(2—33)
式中:g ——观测数据的分组数;
j f ——计数间隔t 内到达j k 辆车这一事件发生的次(频)数;
j k ——计数间隔t 内的到达数或各组的中值;
N ——观测的间隔总数。
2.递推公式
m e P -=)0(
)(1
)1(x P x m
x P +=+ (2—34)
3.适用条件
车流密度不大,车辆间相互影响微弱,其它外界干扰因素基本不存在,即车流是随机的,此时应用泊松分布能较好的拟合观测数据。
在概率论中,泊松分布的均值M 和方差D 均等于t λ,而观测数据的均值m 和方差2S 均为无偏估计,因此,当观测数据表明m S /2显著不等于1.0时,就是泊松分布不合适的表征。2S 可按下式计算:
∑∑==--=--=g j j j N i i f m k N m k N S 1
212
2
)(11)(11 (2—35) 式中符号意义同前。
(二)二项分布
1.基本公式 n x n
t
n t
C x P x n x x n ,,2,1,0,)1()(
)(Λ=-
=-λλ (2—36)
式中:)(x P ——在计数间隔t 内到达x 辆车的概率;
λ——平均到达率;
t ——每个计数间隔持续的时间或距离;
n ——正整数。
其中
)!
(!!
x n x n C x n
-=
通常记n t p /λ=,则二项分布可写成:
n x p p C x P x n x x n ,,2,1,0,)1()(Λ=-=- (2—37) 式中10<
用式(2—37)可计算在计数间隔t 内恰好到达x 辆车的概率。除此之外,还可计算:
到达数小于k 的概率:
∑-=--=<1
0)1()(k i i
n i i n p p C k x P (2—38)
到达数大于k 的概率:
i
n i k
i i n p p C k x P -=--=>∑)1(1)(0 (2—39)
其余类推。 由概率论可知,对于二项分布,其均值np M =,方差)1(p np D -=,D M >。因此,当用二项分布拟合观测数时,根据参数p 、n 与方差、均值的关系式,用样本的均值m 、方差2S 代替M 、D , p 、n 可按下列关系式估算(n 值计算结果取整):
m S m p /)(2-= (2—40)
)/(/22S m m p m n -== (2—41)
式中m 和2S 根据观测数据按式(2—33)、式(2—35)计算。
2.递推公式
n p P )1()0(-=
)(11)1(x P p
p
x x n x P ?-?+-=
+ (2—42) 3.适用条件
车流比较拥挤、自由行驶机会不多的车流用二项分布拟合较好。由于二项分布的均值M 大于方差D ,当观测数据表明m S /2显著大于1.0就是二项分布不适合的表征。
(三)负二项分布
1.基本公式
L ,2,1,0,)1()(11=-=--+x p p C x P x
x βββ (2—43) 式中p 、β为负二项分布参数。10<
同样地,用式(2—43)可计算在计数间隔t 内恰好到达x 辆车的概率。到达数大于k 的概率可由下式计算:
∑=--+--=>k
i i
i p p C k x P 011)1(1)(βββ (2—44)
其余类推。
由概率论知负二项分布的均值,/)1(p p M -=β,/)1(2p p D -=β方差D M <。因此,当用负二项分布拟合观测数据时,利用p 、β与均值、方差的关系式,用样本的均值m 、方差2S 代替D M 、,β、p 可由下列关系式估算(β值计算结果取整):
)
/(/2
22
m S m S m p -==β (2—45)
式中观测数据的均值m 和方差2S ,按式(2—33)、式(2—35)计算。
2.递推公式
βp P =)0( (2—46)
)1()1(1
)(---+=
x P p x
x x P β , 1≥x 3.适用条件
当到达的车流波动性很大,或者当以一定的计算间隔观测到达的车辆数而其间隔长度一直延续到高峰期间与非高峰期间两个时段时,所得数据就可能会具有较大的方差,此时应使用负二项分布拟合观测数据。m S /2显著小于1时就是负二项分布不适合的表征。
二、连续型分布
描述事件之间时间间隔的分布为连续型分布,连续型分布常用来描述车头时距、可穿越空档、速度等交通流参数的统计特征。
(一)负指数分布
1.基本公式
若车辆到达符合泊松分布,则车头时距就是负指数分布。由式(2—27)可知,在计数间隔t 内没有车辆到达(0=x )的概率为:
t
e P λ-=)0(
上式表明,在具体的时间间隔t 内,如无车辆到达,则上次车到达和下次车到达之间车头时距至少有t 秒,换句话说,)0(P 也是车头时距等于或大于t 秒的概率,于是有:
t e t h P λ-=≥)( (2—47) 而车头时距小于t 的概率则为:
t e t h P λ--=<1)( (2—48)
若Q 表示小时交通量,则3600/Q =λ(veh/s),式(2—47)可以写成:
3600
/)(Qt e
t h P -=≥ (2—49)
式中3600/Qt 是到达车辆数概率分布的平均值。若令M 为负指数分布的均值,即平均车头时距,则应有:
λ
1
/3600==Q M (2—50)
负指数分布的方差为:
2
1
λ
=
D (2—51)
负指数分布的概率密度函数为:
()[]t e t h P dt
d
t p λλ-=≥-=
1)( (2—52) 用样本的均值m 代替M 、样本的方差2S 代替D ,即可算出负指数分布的参数λ
2—48)的图示。
t h ≥s m 1=)
2.适用条件
负指数分布适用于车辆到达是随机的、有充分超车机会的单列车流和密度不大的多列车流的情况。通常认为当每小时每车道的不间断车流量等于或小于500辆时,用负指数分布描述车头时距是符合实际的。
由式(4—52)可知,负指数分布的概率密度函数曲线是随车头时距h 单调递减的,这说明车头时距越小,其出现的概率越大。这种情况在限制超车的单列车流中是不可能出现的,因为车头间距至少应为一个车身长,车头时距必须有一个大于零的最小值τ,这就是负指数分布的局限性。
(二)移位负指数分布
1.基本公式
为克服负指数分布的车头时距越趋于零其出现概率越大这一缺点,可将负指数分布曲线从原点O 沿t 轴向右移一个最小的间隔长度τ(根据调查数据确定,一般在1.0~1.5s 之间),得到移位负指数分布曲线,它能更好地拟合观测数据。
移位负指数分布的分布函数为:
ττλ≥=≥--t e t h P t ,)()( (2—53) ττλ≥-=<--t e t h P t ,1)()( (2—54)
其概率密度函数为:
??
?<≥=--τ
τ
λτλt t e t p t ,
0,
)()( (2—55) 均值和方差分别为:
???
????=+=211λτλ
D M (2—56)
用样本均值m 代替M ,样本方差2S 代替D ,就可算出移位负指数分布的
两个参数λ和τ。图2—4为移位负指数分布式(2—53)的曲线图,其中λ的表达式由式(2—56)得到。
图2—4 移位负指数分布曲线(s M 1=)
2.适用条件
移位负指数分布适合描述限制超车的单列车流车头时距分布和低流量时多列车流的车头时距分布。
移位负指数分布的概率密度函数曲线是随)(τ-t 的值单调递减的,即服从移位负指数分布的车间时距,越接近τ其出现的可能性越大,但这在一般情况下不符合驾驶员的心理习惯和行车规律。从统计角度看,具有中等反应强度的驾驶员占大多数,他们行车时是在安全条件下保持较短的车间距离(前车车尾与后车车头之间的距离,不同于车头间距),只有少部分反应特别灵敏或较冒失的驾驶员才会不顾安全去地追求更短的车间距离。因此,车头时距分布的概率密度曲线一般总是先升后降的。为了克服移位负指数分布的这种局限性,可用更通用的连续型分布,如爱尔朗分布、韦布尔分
交通流理论第五章
第五章连续交通流模型 如果从飞机上俯看某条高速公路,我们会很自然地把来来往往的车流想象成河流或某种连续的流体。正是由于这种相似性,经常使用流量、密度、速度等流体力学术语来描述交通流特性。我们知道,流体满足两个基本假设:一是流量守恒,二是速度与密度(或流量与密度)对应。对于交通流,其中第一个假设比较容易证明,而第二个假设的成立需要有一定的条件。本章将推导交通守恒方程,介绍它的解析解法和数值解法,以此为依据还将介绍更精确的动态模型,并详细地讨论交通波理论。 第一节守恒方程 、守恒方程的建立 守恒方程比较容易推导,可以采用下面的方法:考察一个单向连续路段,在该路段上选择两个交通记数站,如图5—1所示,两站间距为△ x,两站之间没有出口或入口(即该路 段上没有交通流的产生或离去)。 图5—1 用于推导守恒方程的路段示意图 设N i为厶t时间内通过i站的车辆数,q i是通过站i的流量,△ t为1、2站同时开始记数所持续的时间。令△ N = N2-N1,则有: N i/ △ t=q N2/ △ t=(2 △N/A t=A q 如果△x足够短,使得该路段内的密度k保持一致,那么密度增量厶k可以表示如下:
Z -”号,是因为如果(N 2— NJ >0,说明从站2驶离的 也就是两站之间车辆数减少,即密度减小。换句话说, -/:q :A = . :k. :x 卫辿=0 L X L t 假设两站间车流连续,且允许有限的增量为无穷小,那么取极限可得: 殂+鱼=0 x -1 该式描述了交通流的守恒规律,即有名的守恒方程或连续方程,这一方程与流体力学的方程 有着相似的形 式。 如果路段上有交通的产生或离去,那么守恒方程采用如下更一般的形式: 旦』=g(x,t ) .X :t 这里的g (x , t )是指车辆的产生(或离去)率(每单位长度、每单位时间内车辆的产生或 离去数)。 二、守恒方程的解析解法 守恒方程5—1和5—2可以用来确定道路上任意路段的交通流状态,它把两个互相依 赖的基本变量一一密度 k 和流率q 与两个相互独立的量一一时间 t 和距离x 联系了起来。 但是,如果没有另外的附加方程或假设条件, 对方程5—2的求解是不可能的。为此我们把 流率q 当作密度k 的函数,即q=f (k )。相应地u=g (k ),这是一个合理的假设,但只有在 平衡状态时才能 成立。下面介绍守恒方程的解析解法。 回到式(5—2)的求解。考虑下面的基本关系式: q 二 ku (5 — 3) 易知,如果在式(5 — 2)中u=f (k ),我们将得到只有一个未知量的方程, 可以对其解析求解。 针对一般情况的解析解法很复杂,实际应用起来也不方便。为了简化求解过程,我们只考 虑没有交通产生和离去的影响,即 g (x , t ) =0的情况,这样我们可以把守恒方程化为如 下形式: ■ ★- 'k ;:k df ::k : k 一(ku) [kf (k)] f (k) k 0 式中(N 2- N 1)前面之所以加上" 车辆数 大于从站1驶入的车辆数, △ N 与厶k 的符号相反,于是: 同时,根据流量的关系,有: 因此 △ q A t=A N (5— 1) (5— 2) [ (5— 4)
第四章交通流理论.ppt.Convertor
Traffic Flow Theory 第四章交通流理论1 Generalization 第一节概述 2 交通流理论:运用数学和物理学的方法来描述交通特性的一个边缘科学,它用分析的方法阐述交通现象及其机理,使我们更好的理解交通现象及其本质,并使城市道路与公路的规划设计和运营管理发挥最大的功效。 3 1 初期:概率论方法(20 世纪30 年代) 1933年,金蔡(Kinzer.J.p提出了泊松分布; 2 中期:跟驰理论、交通波理论和排队理论(20 世纪50 年代) 1959 年12 月,首届交通流理论学术讨论会召开; 3 后期:迅速发展时期(20 世纪60 年代后) 丹尼尔(Daniel」.G)和马休(Marthow.J.H )1975年出版了《交通流理论》。发展历程 4 1. 交通量、速度和密度的相互关系和量测方法 2. 交通流的统计分布特性 3. 排队论的应用 4. 跟驰理论 5. 驾驶员处理信息的特性 6. 交通流的流体力学模拟理论 7. 交通流模拟主要内容 5 第二节交通流的统计分布特性 The Statistical Distribution Characteristic of Traffic Flow 6 1 、到达某一断面的车辆数:离散型分布 2、到达同一地点的两辆车的时间间隔:连续性分布 3、离散型分布:计数分布 连续性分布:间隔分布、车头时距分布、速度分布、可穿越空档分布 统计分布的含义 7 1、泊松分布 二项分布 2、 3、负二项分布 离散型分布 8 1、泊松分布 (1)适用条件:车流密度不大,其它外界干扰因素基本上不存在,车流是随机的 (2)基本公式:
交通流理论第八章
第八章无信号交叉口理论 平面交叉口把相交的道路路段连接起来,构成路网。因为在交叉口同一平面上有多股交通流动,考虑到交通安全,有时需要进行适当的交通控制。按照有无交通控制,可将交叉口分为有交通信号控制的交叉口(简称为信号交叉口)和无交通信号控制的交叉口(简称为无信号交叉口)。无信号交叉口是最普遍的交叉口类型,虽然它的通行能力可能低于信号交叉口,但它在网络交通控制中起到了非常重要的作用。一个运行情况不良的无信号交叉口,可能会影响整个信号网络或者智能运输系统的运行,并且无信号交叉口理论是信号交叉口理论的基础,因此首先对无信号交叉口进行研究是非常必要的。 无信号交叉口不像信号交叉口那样会给驾驶员确定的指示或控制,驾驶员必须自己判断何时进入交叉口是安全的。驾驶员所寻求的在交通流中进入交叉口的安全机会或“间隙”称为可插车间隙,它用时间来度量,并且等于某一车头时距。可插车间隙理论是分析无信号交叉口运行的基本理论,其它的所有分析过程在某种程度上都依赖于可插车间隙理论,或者即使没有明确地应用该理论,但也是以它为基础的。 在无信号交叉口中,必须考虑车辆的优先权问题。如果有一辆车试图进入交叉口,但此时存在优先级高于它的交通流,那么它必须让路给这些交通流。另外,低级别交通流的存在也会影响高级别交通流的运行。由此可见,无信号交叉口的车流间存在着相互作用。 本章的第一节首先讨论无信号交叉口的理论基础,着重介绍可插车间隙理论以及在该理论中用到的几种基本的车头时距分布。普通的无信号交叉口(即四路相交)可分为二路停车和四路停车两类,即主路优先控制的交叉口(包括停车控制和让路控制)和主次路不分的交叉口。在第二节中首先讨论了二路停车的无信号交叉口,第三节接着讨论了四路停车的无信号交叉口。在考虑交叉口交通运行时还用到了经验方法,并且在许多情况下经验方法的结果也是比较准确的,与实际情况差别并不大,在第四节中介绍了这些方法。 第一节理论基础 一、可插车间隙理论 1. 可利用间隙 可插车间隙理论是分析无信号交叉口的基本理论,理解该理论必须先理解可利用间隙的概念。例如,如果主路连续到达车辆间的时间间隔是10s,那么次路驾驶员能够驶离停车线吗?有多少驾驶员能够在这10s的间隔内驶离? 次要车流中所有驾驶员在相似的位置所能够接受的主要车流的最小间隙称为临界间隙,一般记为t c。根据通常假设的驾驶员行为模式,只有在主要车流的车辆间隙至少等于临界间隙t c时,次要车流的驾驶员才能进入交叉口。例如,如果临界间隙是4s,那么次要车流的驾驶员要驶入交叉口至少需要主要车流车辆间有一个4s的间隙,并且他在其它任何时候通过同一个交叉口都会需要同样的4s时间。另外,在一个非常长的间隙中会有多名驾驶员从次路上进入交叉口。可插车间隙理论中称在较长时间间隙中进入交叉口的次要车流车辆间的车头时距为“跟随时间”t f。 在描述无信号交叉口的理论中,经常假设驾驶员是具有一致性和相似性。驾驶员的一致性是指在所有类似的情况下、在任何时刻其行为方式相同,而不是先拒绝一个间隙随后
交通流理论第四章
第四章跟驰理论与加速度干扰 本章将主要讨论单车道情况下的车辆跟驰现象,介绍跟驰理论,建立相应的跟驰理论模型,最后简要介绍一下加速度干扰问题。 跟驰理论是运用动力学方法研究在限制超车的单车道上,行驶车队中前车速度的变化引起的后车反应。车辆跟驰行驶是车队行驶过程中一种很重要的现象,对其研究有助于理解交通流的特性。跟驰理论所研究的参数之一就是车辆在给定速度u 下跟驰行驶时的平均 车头间距s ,平均车头间距则可以用来估计单车道的通行能力。在对速度—间距关系的研究中,单车道通行能力的估计基本上都是基于如下公式: C 1000 u / s (4—1)式中:C ——单车道通行能力(veh/h ); u ——速度(km/h ); s ——平均车头间距(m )。 研究表明,速度—间距的关系可以由下式表示: 2 s u u (4—2)式中系数、、可取不同的值,其物理意义如下: ——车辆长度,l ; ——反应时间,T ; ——跟驰车辆最大减速度的二倍之倒数。 2 附加项u2保证了足够的空间,使得头车在紧急停车的情况下跟驰车辆不与之发生碰撞,的经验值可近似取为0.023s 2/ 英尺。一般情况下是非线性的,对于车速恒定(或近似恒定)、车头间距相等的交通流,的近似计算公式可取为: 11 0.5 a f a l(4 —3)式中:a f 、a l ——分别为跟车和头车的最大减速度。 跟驰理论除了用于计算平均车头间距以外,还可用于从微观角度对车辆跟驰现象进行分析,近似得出单车道交通流的宏观特性。总之,跟驰理论是连接车辆个体行为与车队宏观特性及相应流量、稳定性的桥梁。 第一节线性跟驰模型的建立 单车道车辆跟驰理论认为,车头间距在100?125m 以内时车辆间存在相互影响。分
交通工程学交通流理论习题解答
《交通工程学 第四章 交通流理论》习题解答 4-1 在交通流模型中,假定流速 V 与密度 k 之间的关系式为 V = a (1 - bk )2 ,试依据两个边界条件,确定系数 a 、b 的值,并导出速度与流量以及流量与密度的关系式。 解答:当V = 0时,j K K =, ∴ 1j b k = ; 当K =0时,f V V =,∴ f a V =; 把a 和b 代入到V = a (1 - bk )2 ∴ 2 1f j K V V K ??=- ? ? ? ? , 又 Q KV = 流量与速度的关系1j Q K V ?= ? 流量与密度的关系 2 1f j K Q V K K ??=- ? ??? 4-2 已知某公路上中畅行速度V f = 82 km/h ,阻塞密度K j = 105 辆/km ,速度与密度用线性关系模型,求: (1)在该路段上期望得到的最大流量; (2)此时所对应的车速是多少 解答:(1)V —K 线性关系,V f = 82km/h ,K j = 105辆/km ∴ V m = V f /2= 41km/h ,K m = K j /2= 辆/km , ∴ Q m = V m K m = 辆/h (2)V m = 41km/h 解答:35.9ln V k = 拥塞密度K j 为V = 0时的密度, ∴ 180 ln 0j K =
∴ K j = 180辆/km 4-5 某交通流属泊松分布,已知交通量为1200辆/h ,求: (1)车头时距 t ≥ 5s 的概率; (2)车头时距 t > 5s 所出现的次数; (3)车头时距 t > 5s 车头间隔的平均值。 解答:车辆到达符合泊松分布,则车头时距符合负指数分布,Q = 1200辆/h (1)153600 3 (5)0.189Q t t t P h e e e λ- ?-?-≥==== (2)n = (5)t P h Q ≥? = 226辆/h (3)55158s t t e tdt e dt λλλλλ +∞-+∞-??=+=? 4-6 已知某公路 q =720辆/h ,试求某断面2s 时间段内完全没有车辆通过的概率及其 出现次数。 解答:(1)q = 720辆/h ,1 /s 36005 q λ= =辆,t = 2s 25 (2)0.67t t P h e e λ- -≥=== n = ×720 = 483辆/h 4-7 有优先通行权的主干道车流量N =360辆/ h ,车辆到达服从泊松分布,主要道路允许次要道路穿越的最小车头时距=10s ,求 (1) 每小时有多少个可穿空档 (2) 若次要道路饱和车流的平均车头时距为t 0=5s ,则该路口次要道路车流穿越主要道路车流的最大车流为多少 解答: 有多少个个空挡?其中又有多少个空挡可以穿越? (1) 如果到达车辆数服从泊松分布,那么,车头时距服从负指数分布。 根据车头时距不低于t 的概率公式,t e t h p λ-=≥)(,可以计算车头时距不低于10s 的 概率是 3679.0)10(3600 10360==≥÷?-e s h p 主要道路在1小时内有360辆车通过,则每小时内有360个车头时距,而在360个车头时距中,不低于可穿越最小车头时距的个数是(总量×发生概率) 360×=132(个)
《交通流理论》课程教学大纲
《交通流理论》课程教学大纲 课程名称:交通流理论(Traffic flow theory) 课程编号:022039 总学时数:32学时讲课学时:32学时 学分:2学分 先修课程:《交通工程学》等 教材:《交通流理论》(王殿海主编,人民交通出版社,2002年9月第一版) 参考书目:丹尼尔.L.鸠诺夫等编著,《交通流理论》,人民交通出版社,1983年 课程内容简介: 本课程介绍交通流理论的历史沿革、主要内容、理论体系、思想方法、发展趋势等,讲授交通流特性、驾驶员的交通特性、跟驰理论与加速度干扰、宏观交通流模型、交通流研究最新进展。 一、课程性质、目的和要求 本课程是交通工程专业的主要基础课程之一。通过本课程的学习,使学生了解和掌握交通流理论的主要内容及每一种理论的研究方法和思路。 二、教学内容、要点和课时安排 学习本课程应达到以下的要求: 1、了解交通流特性的三要素。 2、掌握驾驶员的交通特性。 3、掌握跟驰理论与加速度干扰。 4、深刻理解及掌握宏观交通流模型。 5、掌握交通流研究最新进展。 本课程的重点:交通流特性及其统计分布理论;驾驶员特性及其对交通流特性的影响;车辆跟驰理论等。 本课程的教学内容共分六章。 第一章:绪论 主要内容是:交通流理论的历史沿革、主要内容、理论体系、思想方法、发展趋势等。 重点、难点: 第二章:交通流特性 主要内容是:交通调查、交通流参数、交通流统计分布特性、交通流参数关系 重点、难点:交通流特性及其统计分布理论 第三章:驾驶员交通特性 主要内容是:驾驶任务、离散驾驶行为、连续驾驶模型、驾驶员交通特性应用 重点、难点::驾驶任务、离散驾驶行为、连续驾驶模型、驾驶员交通特性应用 第四章:跟驰理论与加速度干扰 主要内容是:线性跟驰模型、稳定性分析、稳态流分析、加速度干扰
交通流理论第一章
第一章绪论 交通流理论是研究交通流随时间和空间变化规律的模型和方法体系。多年来,交通流理论在交通运输工程的许多领域,如交通规划、交通控制、道路与交通工程设施设计等都被广泛地应用着,应该说交通流理论是这些研究领域的基础理论。近些年来,尤其是随着智能运输系统的蓬勃发展,交通流理论所涉及的范围和内容在不断地发展和变化,如控制理论、人工智能等新兴科学的思想、方法和理论已经用于解决交通运输研究中遇到的复杂问题,又如随着计算机技术的发展,模拟技术和方法越来越多地被用来描述和分析交通运输工程的某些过程或现象。 第一节交通流理论的沿革 交通流理论的发展与道路交通运输业的发展和科学技术的发展密切相关,在交通运输业发展的不同时期和科学技术发展的不同阶段,对交通流理论的需求和研究能力都不同,因此产生了交通流理论的不同发展阶段。 按照时间顺序,交通流理论可以划分为三个阶段。 创始阶段此阶段被界定为20世纪30年代至第二次世界大战结束。在此期间,由于发达国家汽车工业和道路建设的发展,需要摸索道路交通的基本规律,以便对其进行科学管理,道路交通产生了对交通流理论的初步需求,需要有人对其进行研究。此阶段的代表人物为格林希尔治(Bruce D.Greenshields), 其代表性成果是用概率论和数理统计的方法建立数学模型,用以描述交通流量和速度的关系,并对交叉口交通状态进行调查。正是由于其奠基性工作,人们常常称格林希尔治为交通流理论的鼻祖。 快速发展阶段此阶段被界定为第二次世界大战结束至20世纪50年代末。在这一阶段,发达国家的公路和城市道路里程迅猛增长,汽车拥有量大幅度上升,此时交通规划和交通控制已经提到日程。如何科学地进行交通规划和控制,需要交通流理论提供支持。此阶段的特点是交通流理论获得高速发展,并产生了多个分支和学术上的多个代表人物。学术分支包括:车辆跟驰(car following)理论、基于流体力学的交通波理论(traffic wave theory)和排队理论(queuing theory)等。此时期造就的本领域的代表性人物有:沃德洛尔(Wardrop)、鲁契尔(Reuschel)、派普斯(Pipes)、莱特希尔(Lighthill)、惠特汉(Whitham)、纽厄尔(Newel)、韦伯斯特(Webster)、伊迪(Edie)、佛特(Foote)、张德勒(Chandler)、赫尔曼(Herman)等。 稳步发展阶段此阶段被界定为1959年以后。此阶段由于汽车的普及,交通已经成为世界各国大中城市越来越严重的问题,需要发展交通流理论来加以解决。正是这种需求,使交通流理论得到了稳步发展。1959年举行了第一次国际研讨会(The First International Symposium on the Theory of Traffic Flow),并确定本次会议为三年一次的系列会议(Series of Triennial Symposia on the Theory of Traffic Flow and Transportation)的首次会议。除了这一系列会议以外,近些年来在世界各国又举行了许多交通运输领域的专题学术年会,这些年会都涉及到了交通流理论。 按照研究手段和方法,交通流理论可划分为两类。 传统交通流理论所谓的传统交通流理论是指以数理统计和微积分等传统数学和物理方法为基础的交通流理论,其明显特点是交通流模型的限制条件比较苛刻,模型推导过程比较严谨,模型的物理意义明确,如交通流分布的统计特性模型、车辆跟驰模型、交
《交通工程学》习题解(2-5章)
第二章 交通特性 2-1下表为某高速公路观测交通量,试计算: (1)小时交通量;(2)5min 高峰流率;(3)15min 高峰流率;(4)15min 高峰小时系数。 解:⑴ 小时交通量: h Q /2493195 190210195201205220219232217208201辆=+++++++++++= ⑵ 5min 高峰流率: h Q /27845 60 2325辆=? = ⑶ 15min 高峰流率: h Q /268415 60 )220219232(15辆=? ++= ⑷ 15min 高峰小时系数: 929.04 6712493 15=?= PHF 2-2某公路需进行拓宽改造,经调查预测在规划年平均日交通量为50000辆(小汽车)/d ,设计小时系数K=17.86x -1.3-0.082,x 为设计小时时位(x 取30),取一条车道的设计通行能力为1500辆(小汽车)/小时,试问该道路需要几车道。 解:已知: % 26.131326.0082.03086.17082.086.1730 ,/h 1500C ,/d 50000AADT 3 .13.11==-?=-====--x K x 辆辆 设计小时交通量: h K AADT DHV /66301326.050000100辆=?=?= 车道数: 42.41500 6630 1===C DHV n 该道路需修6车道。 注:此题5.0=D K 。 如果6.0=D K ,3.5=n 。 2-3在一条24小时Km 长的公路段起点断面上,在6min 测得100辆汽车,车流量是均匀连续的,车速V=20km/h ,试求Q ,h t ,h s ,K 以及第一辆车通过该路段所需的时间t 。
第四章交通流理论(详细版)
第四章交通流理论2 §4-1概述 一、概念 ●交通流理论,是一门用以解释交通流现象或特性的理论,运用数学或物理的方法,从宏观和微观描述交通流运行 规律。 3 二、发展 ●在20世纪30年代才开始发展,概率论方法。 ●1933年,Kinzer.J.P泊松分布用于交通分析的可能性。 ●1936年,Adams.W.F发表数值例题。 ●1947年,Greenshields泊松分布用于交叉口分析。 ●20世纪50年代,跟驰理论,交通波理论(流体动力学模拟)和车辆排队理论。 ●1975年丹尼尔(DanieL lG)和马休(Marthow,J.H)出版了《交通流理论》一书。 ●1983年,蒋璜翻译为中文。人交出版社出版。 ● 4 三、种类 幻灯片5§4-1概述 ●交通流量、速度和密度的相互关系及量测方法; ●交通流的统计分布特性; ●排队论的应用; ●跟驰理论; ●驾驶员处理信息的特性; ●交通流的流体力学模拟理论;. ●交通流模拟。§4-2交通流的统计分布特性 一、交通流统计分布的含义与作用 ●离散型分布: ●在某固定时段内车辆到达某场所的波动性;(也可描述某一路段上所拥有车辆数的分布特性)。 ●泊松分布/二项分布/负二项分布 ●连续型分布: ●研究上述事件发生的间隔时间的统计特性,如车头时距的概率分布。 ●负指数分布/移位负指数分布/爱尔朗分布 7 二、离散型分布 幻灯片8§4-2交通流的统计分布特性 ●在一定的时间间隔内到达的车辆数,或在一定的路段上分布的车辆数,是所谓的随机变数,描述这类随机变数的 1. 泊松分布 统计规律用的是离散型分布4-2 交通流的统计分布特性 (1) 适用条件
交通流理论
第二节交通流理论 一、机动车交通 机动车交通是城市道路交通的主体。国外城市中的机动车大多是小汽车,车种较为单一,在一定的路段上车速基本相同,交通流相对比较简单。我国城市的机动车车种复杂,车速、性能差异较大,交通流比国外城市要复杂得多。 1.机动车流速度、流量和密度关系 (1)基本关系式 如果车流中所有车辆均以相同的车速通过某一段路程,则有下列关系: 式中:K为交通密度(辆/公里);Q为交通量 (辆/小时);V为车速(公里/小时)。 公式也经常写作: (2)车速与密度的关系 Vf为自由车速,Kj为当车速为零时的阻塞密度。 由上式及图可知,当密度逐渐增大则车速逐渐减小,当达到阻塞密度Kj时,车速为零,交通停顿。 (3)交通量与密度的关系 Ko称为最佳密度。由图可知,在Ko之前,交通量随密度的增加而增加,而在Ko之后,交通量将随密度的增加而减少。 (4)交通量与车速的关系
Vo称为最佳车速。由图可知在Vo之前,交通量随车速的增加而增加,而在Vo之后,交通量将随车速的增加而减少。 综上所述,将Q-K, Q-V及V-K关系图作于同一平面上,如上图,全面分析可知: (1)当密度很小时,交通量亦小,而车速很高(接近自由车速)。 (2)随着密度逐渐增加,交通量亦逐渐增加,而车速逐渐降低。当车速降至Vo时,交通量达到最大此时的车速称为临界车速,密度Ko称为最佳密度。 (3)当密度继续增大(超过Ko),交通开始拥挤,交通量和车速都降低。当密度达到最大(即阻塞密度凡)时,交通量与车速都降至为零,此时的交通状况为车辆首尾相接,堵塞于道路上。 (4)最大流量Qmax、临界车速Vo和最佳密度Ko是划分交通是否拥挤的特征值。当Q>Qmax,K>Ko,V<Vo时交通属于拥挤;当Q≤Qmax,K≤Ko,V≥Vo时,交通属于畅通。 由上述三个参数间的量值关系可知,速度和容量 (密度)不可兼得。因此,为保证高等道路(快速路、主干路)的速度,应对其密度加以限制 (如限制出入口、封闭横向路口等)。
交通流理论
交通流理论是运用数学、物理学和力学的原理描述交通流特性的一门边缘学科,是研究交通流随时间和空间变化规律的模型和方法体系,其目的是为了阐述交通现象形成的原理。 目前,对交通流理论的定义不尽相同,但归纳各种定义的主要思想,可以给交通流理论这样一个定义:交通流理论是研究在一定环境下交通流随时间和空间变化规律的模型和方法体系。根据上述定义,交通流理论设计的范围非常广泛,其研究内容很难一言以蔽之。参考各种文献资料后,将交通流理论的研究内容分为以下12部分: (1)交通流特性 主要介绍交通流的几个参数的概念和基本公式及交通调查的几种常用方法和特点。重点研究交通流参数经常用到的两类统计分布,即:离散型分布和连续型分布。 (2)交通流模型 交通流模型主要指速度—流量,速度—密度,流量—密度模型。交通流模型能实现交通流变量之间的转换,即能实现控制变量与交通性能指标之间的转换,从而在交通管理中可用于控制某个变量以使交通性能达到最优的的目的。 (3)驾驶人交通特性 在此驾驶人交通特性主要是指驾驶人对交通流的影响。包括人—车—路系统中驾驶人的驾驶任务,驾驶人的离散交通特性及根据闭环控制原理,研究驾驶传递函数及其应用,驾驶人交通特性在交通流中的应用,驾驶人交通特特性在交通流中的作用,包括坡道加速公式,可叉车间隙和合流,停车视距和交叉口视距以及速度错觉,信息干扰,实时信息等内容。 (4)车辆跟驰理论 交通流车辆跟驰理论是应用动力学方法,将交通流处理为分散的粒子组成,从围观角度探究在无法超车的单一车道上车辆列队行驶时,后车跟随前车的行驶状态,并用数学模式表达而加以分析阐明的一种理论。 (5)排队理论及应用 (6)连续交通流模型 (7)宏观交通流模型 (8)交通影响模型 (9)无信号交叉口理论 (10)信号交叉口理论 (11)交通系统仿真 (12)交通流理论的应用 城市道路信号交叉口作为城市道路网络中通行能力和交通安全的瓶颈,在道路衔接中起着举足轻重的作用,其通行能力的大小很大程度上决定或制约着整个城市路网的通行能力,影响着城市交通网络的运输能力。平面交叉口处反复地分流、合流、交叉,使其交通状况尤其复杂。 日常的交通拥堵大部分都是由于交叉口的通行能力不足造成的,因此信号交叉口成为路网规划、建设、改造和交通治理的重点。提高交叉口的通行能力,减少交叉口延误是城市道路交通追求的目标,也是改善城市道路整体状况的最有效的方法。 我国大多数城市道路信号交叉口采用多相位信号控制,基于我国城市信号交
交通流理论第四章
第四章 跟驰理论与加速度干扰 本章将主要讨论单车道情况下的车辆跟驰现象,介绍跟驰理论,建立相应的跟驰理论 模型,最后简要介绍一下加速度干扰问题。 跟驰理论是运用动力学方法研究在限制超车的单车道上,行驶车队中前车速度的变化引起的后车反应。车辆跟驰行驶是车队行驶过程中一种很重要的现象,对其研究有助于理解交通流的特性。跟驰理论所研究的参数之一就是车辆在给定速度u 下跟驰行驶时的平均车头间距s ,平均车头间距则可以用来估计单车道的通行能力。在对速度—间距关系的研究中,单车道通行能力的估计基本上都是基于如下公式: s u C /1000?= (4—1) 式中:C ——单车道通行能力(veh/h ); u ——速度(km/h ); s ——平均车头间距(m )。 研究表明,速度—间距的关系可以由下式表示: 2 u u s γβα++= (4—2) 式中系数α、β、γ可取不同的值,其物理意义如下: α——车辆长度,l ; β——反应时间,T ; γ——跟驰车辆最大减速度的二倍之倒数。 附加项2 u γ保证了足够的空间,使得头车在紧急停车的情况下跟驰车辆不与之发生碰 撞,γ的经验值可近似取为0.023s 2 /英尺。一般情况下γ是非线性的,对于车速恒定(或近似恒定)、车头间距相等的交通流,γ的近似计算公式可取为: ()1 15.0---=l f a a γ (4—3) 式中:f a 、l a ——分别为跟车和头车的最大减速度。 跟驰理论除了用于计算平均车头间距以外,还可用于从微观角度对车辆跟驰现象进行 分析,近似得出单车道交通流的宏观特性。总之,跟驰理论是连接车辆个体行为与车队宏观特性及相应流量、稳定性的桥梁。
交通流理论
第五章交通流理论 第一节概述 交通流理论是研究交通流变化规律的方法体系,是一门边缘科学,它通过分析的方法来阐述交通现象及其机理,探讨交通流各参数间的相互关系及其变化规律,从而为交通规划、交通控制、道路设计以及智能运输系统提供理论依据和支持。 二十世纪三十年代交通流理论的研究开始起步,直到第二次世界大战结束为第一阶段。二战以后,世界各国开始着手发展经济,交通问题变得日益重要,对交通流理论的研究也就进入了第二阶段。1959年12月,在美国的底特律市举行了首届国际交通流理论学术会议,丹尼尔(Daniel)和马休(Matthew)在汇集了各方面的研究成果后,于1975年整理出版了《交通流理论》一书。 随着科学的进步,特别是计算机技术的发展,交通流理论的内容也在不断更新和充实。在传统交通流理论的基础上,出现了现代交通流理论。传统交通流理论已经基本趋于成熟,而现代交通流理论正在逐步发展。就目前的应用来看,传统交通流理论仍居主导地位,其方法相对也较容易实现。现代交通流理论以传统交通流理论为基础,只是其所应用的研究工具和手段与以前相比得到了很大改善,从更宽广的领域对交通流理论进行了研究。 主要内容如下: 1、交通流特性参数的分布; 2、排队论(也即随机服务系统)的应用; 3、跟驰理论介绍; 4、流体力学模型以及交通波理论; 5、可插车间隙理论。 第二节交通流特性参数的统计分布 在编制交通规划或设计道路交通设施、确定交通管理方案时,需要预测交通流的某些具体特性,并且希望能使用现有的数据或假设的数据。 车辆的到达具有随机性,描述这种随机性的方法有两种:一种是离散型分布,研究在一定时间内到达的交通数量的波动性;另一种是连续型分布,研究车辆间隔时间、车速等交通流参数的统计分布。 一、离散型分布 在一定时间间隔内到达的车辆数是随机的,描述其统计规律可以用离散型分布,常用的离散型分布有如下几种。 (一)泊松分布 1.基本公式 4.例题一 某信号交叉口的周期为c=97秒,有效绿灯时间为g=44秒。在有效绿灯时间内排队的车流以V=900辆/小时的流率通过交叉口,在绿灯时间外到达的车辆需要排队。设车流的到达率为q=369辆/小时且服从泊松分布,求到达车辆不致两次排队的周期数占周期总数的最大百分比。 【解】由于车流只能在有效绿灯时间通过,所以一个周期能通过的最大车辆数A=Vg=44×900/3600=11辆,如果某周期到达的车辆数N大于11辆,则最后到达的N-11辆车要发
第四章 交通流理论.ppt.Convertor
Traffic Flow Theory 第四章交通流理论 1 Generalization 第一节概述 2 交通流理论:运用数学和物理学的方法来描述交通特性的一个边缘科学,它用分析的方法阐述交通现象及其机理,使我们更好的理解交通现象及其本质,并使城市道路与公路的规划设计和运营管理发挥最大的功效。 3 1 初期:概率论方法(20世纪30年代) 1933年,金蔡(Kinzer.J.P)提出了泊松分布; 2 中期:跟驰理论、交通波理论和排队理论(20世纪50年代) 1959年12月,首届交通流理论学术讨论会召开; 3 后期:迅速发展时期(20世纪60年代后) 丹尼尔(Daniel .I.G)和马休(Marthow.J.H)1975年出版了《交通流理论》。 发展历程 4 1. 交通量、速度和密度的相互关系和量测方法 2. 交通流的统计分布特性 3. 排队论的应用 4. 跟驰理论 5. 驾驶员处理信息的特性 6. 交通流的流体力学模拟理论 7. 交通流模拟 主要内容 5 第二节交通流的统计分布特性 The Statistical Distribution Characteristic of Traffic Flow 6 1、到达某一断面的车辆数:离散型分布 2、到达同一地点的两辆车的时间间隔:连续性分布 3、离散型分布:计数分布 连续性分布:间隔分布、车头时距分布、速度分布、可穿越空档分布 统计分布的含义 7 1、泊松分布 2、二项分布 3、负二项分布 离散型分布
8 1、泊松分布 (1)适用条件:车流密度不大,其它外界干扰因素基本上不存在,车流是随机的 (2)基本公式: 令:计数间隔平均到达的车辆数,泊松分布参数。 离散型分布 9 1、泊松分布 离散型分布 10 1、泊松分布 (3)递推公式: (4)分布的均值M和方差D: 离散型分布 11 1、泊松分布 Poisson distribution belongs to discrete function with only one parameter. In traffic engineering Poisson distribution equation is used to describe the arrivals of vehicles at intersections or toll booth, as well as number of accident (crash) Poisson distribution is appropriate to describe vehicle’s arrival when traffic volume is not high. When field data shows that the mean and variance have significant difference, we can no longer apply Poisson distribution 离散型分布 12 2、二项分布 (1)适用条件:车流比较拥挤,自由行驶机会不多的车流 (2)基本公式: :独立事件发生的概率, n,p为二项分布参数。 离散型分布 13 2、二项分布 离散型分布 14 2、二项分布
交通流理论第五章
第五章 连续交通流模型 如果从飞机上俯看某条高速公路,我们会很自然地把来来往往的车流想象成河流或某种连续的流体。正是由于这种相似性,经常使用流量、密度、速度等流体力学术语来描述交通流特性。我们知道,流体满足两个基本假设:一是流量守恒,二是速度与密度(或流量与密度)对应。对于交通流,其中第一个假设比较容易证明,而第二个假设的成立需要有一定的条件。本章将推导交通守恒方程,介绍它的解析解法和数值解法,以此为依据还将介绍更精确的动态模型,并详细地讨论交通波理论。 第一节 守恒方程 一、守恒方程的建立 守恒方程比较容易推导,可以采用下面的方法:考察一个单向连续路段,在该路段上选择两个交通记数站,如图5—1所示,两站间距为Δx,两站之间没有出口或入口(即该路段上没有交通流的产生或离去)。 设N i 为Δt 时间内通过i 站的车辆数,q i 是通过站i 的流量,Δt 为1、2站同时开始记数所持续的时间。令ΔN = N 2-N 1,则有: N 1/Δt=q 1 N 2/Δt=q 2 ΔN /Δt=Δq 如果Δx 足够短,使得该路段内的密度k 保持一致,那么密度增量△k 可以表示如下: x 图5—1 用于推导守恒方程的路段示意图
x N N k ?--=?)(12 式中(N 2-N 1)前面之所以加上“-”号,是因为如果(N 2-N 1)>0,说明从站2驶离的车辆数大于从站1驶入的车辆数,也就是两站之间车辆数减少,即密度减小。换句话说,ΔN 与△k 的符号相反,于是: N x k ?-=?? 同时,根据流量的关系,有: △q △t =△N 因此 x k t q ??=??- 即 0=??+??t k x q 假设两站间车流连续,且允许有限的增量为无穷小,那么取极限可得: 0=??+??t k x q (5—1) 该式描述了交通流的守恒规律,即有名的守恒方程或连续方程,这一方程与流体力学的方程有着相似的形式。 如果路段上有交通的产生或离去,那么守恒方程采用如下更一般的形式: ),(t x g t k x q =??+?? (5—2) 这里的g (x ,t )是指车辆的产生(或离去)率(每单位长度、每单位时间内车辆的产生或离去数)。 二、守恒方程的解析解法 守恒方程5—1和5—2可以用来确定道路上任意路段的交通流状态,它把两个互相依赖的基本变量——密度k 和流率q 与两个相互独立的量——时间t 和距离x 联系了起来。但是,如果没有另外的附加方程或假设条件,对方程5—2的求解是不可能的。为此我们把流率q 当作密度k 的函数,即q =f (k )。相应地u =g (k ),这是一个合理的假设,但只有在平衡状态时才能成立。下面介绍守恒方程的解析解法。 回到式(5—2)的求解。考虑下面的基本关系式: ku q = (5—3) 易知,如果在式(5—2)中u =f (k ),我们将得到只有一个未知量的方程,可以对其解析求解。针对一般情况的解析解法很复杂,实际应用起来也不方便。为了简化求解过程,我们只考虑没有交通产生和离去的影响,即g (x ,t )=0的情况,这样我们可以把守恒方程化为如下形式: 0)()]([)(=??+??+??=??+??=??+??t k x dk k df k x k k f t k k kf x t k ku x (5—4) 或
交通流理论第六章
第六章宏观交通流模型 在城市快速发展而使交通变得拥挤的时候,城区的可达性便成为评价城市生活质量的重要方面,而交通拥挤确实已经成为当今各大城市的难题。为解决这一问题,人们采用了各种工程和技术手段,小到路口渠化、信号配时,大到道路网规划、智能运输系统,应该说各项技术均已经达到了有效、适用的地步。最近30年来,人们对应用这些技术形成的交通设施的效果进行了很多研究,并形成了对各单项设施评价的理论和方法,如干道通行能力和效果的评价,交叉口控制效果的评价等。但是如何对一个道路网络的交通效果进行评价更是人们所关心的问题,尤其是ITS快速发展的今天,有一个基于路网的交通流优化和评价模型体系,就显得更为重要了。 本章从宏观的角度介绍一些流量、速度和密集度的量测和推算方法,从而提供网络交通效果评价的基本理论和基本方法。这些方法可用于:1)同一城市不同时期的交通效果对比分析;2)不同城市同一时期的交通效果对比分析;3)路网交通设施设计评价。 第一节以CBD为中心的交通特性 这一节中重点研究不同位置的交通状况与所处城区地理位置之间的关系。 图6—1 交通强度与距市中心距离的关系 一、交通强度 交通强度是指单位面积上单位时间内通过的所有车辆(折合成标准车辆)的行驶距离总和。一般认为CBD(the central business district,商业中心区)是一个城市交通最为敏感的地区,交通强度与距CBD的距离有关。于是,研究者建立了多种以距CBD的距离为自变量的评价交通特性的模型。图6—1是对英国4个城市的研究结果,图中交通强度的单位
是103pcu/h/km 。图形符合指数模型,其模型如下: () a r A I /ex p -= (6—1) 式中: A 、a —— 待定参数; I —— 交通强度(pcu/h/km ); r —— 距CBD 的距离(km )。 式中的参数A 、a 在高峰时段和非高峰时段的标定值是不同的。此式表明,离CBD 越远,交通强度就越小。 二、平均速度 通过对英国6个城市的研究发现,车辆运行的平均速度与距离CBD 的距离有关。以市中心的放射线道路为研究对象,将道路按照一定的距离分割成若干段然后进行观测,并以观测数据建立模型,共建立了如下5种不同的模型: b ar u = (6—2) b ar c u += (6—3) br a u += (6—4) cr be a u --= (6—5) 2 22 21r cb a r b u ++= (6—6) 上述各式中a , b, c 为待定参数,u 是速度,r 的意义同上。 在上述模型中,线性模型(6—4)在应用中出现了较高的估计值,即随着r 值的增加,预测的速度增加过快,因此此式被淘汰。修正的幂函数(6—3),在应用中常常估计出负的速度值,因此也被淘汰,其余三个模型均可使用。图6—2显示的是对Nottingham 的数据分别用式(6—2)、式(6—5)、式(6—6)的拟合情况。图中,横坐标表示距中心区的距离(km ),纵坐标表示行程速度(km/h )。 0 2 (a) (b) (c)
交通流理论期末试卷
交通流理论期末试卷 1、一辆车以加速度b=s 2,从停止行驶至最大速度Vmax=36 km/h ,以这个速度行驶50s 后再以-b 的减速度行驶至停止。计算: (1)旅行速度()dt v 1 v 0 t t ? =T T ,其中T 为总行程时间。 (2)达到最大速度时走过的距离。 (3)如果视速度v 是位移的x 的函数,计算()dx v X 1v 0x x ?=X ,其中X 为总行程。(10分) 2、设行人从两车间安全穿越两车道的马路的时间间隙为4s ,某单行道上随机车流的平均流量为每小时600辆。假设车辆到达时间间隙t 的分布为负指数分布,其中概率密度为: () ???<>=0 00 t e t f t -t λλ 求:(1)行人不能马上穿越马路的概率; (2)由于车辆是有长度的,试修正上述模型; (3)试将上述模型推广到两车道的情形。 (10分) 3、如图所示,主干道与次干道的交汇处,已知主干道在10min 内来车120辆,并且车头 时距h 服从负指数分布[] t -e )t h (λ=> P 。在下表中,给出主干道的车头时距与次干道能通过 的车数的关系。试计算在这10min 内,次干道通过的最大车辆数。 (10分) 主干道与次干道交汇图 主干道车头时距与次干道通行能力关系表 主干道车头时距 h<6 6≤h<8 8≤h<10 10≤h<12 12≤h<15 15≤h<18 18≤h<21
4、已知一辆试验车在公路上行驶5min 之后进入市区,它的速度—时间轨迹图,见下图。 速度—时间轨迹图 初始速度v 0=54km/h ,在30s 时驾驶员开始以54km/h 减速,于96s 时又逐渐加速至60km/h ,以此速度继续到132s 时,被迫调整到较低速度运行。以此速度继续到246s ,之后调整到城市交通与速率限制区段的要求,试验车记录的速度—时间表,见下表。 速度—时间表
第4章交通工程学交通流理论习题解答
《交通工程学 第四章 交通流理论》习题解答 4-1 在交通流模型中,假定流速 V 与密度 k 之间的关系式为 V = a (1 - bk )2,试依据两个边界条件,确定系数 a 、b 的值,并导出速度与流量以及流量与密度的关系式。 解答:当V = 0时,j K K =, ∴ 1j b k = ; 当K =0时,f V V =,∴ f a V =; 把a 和b 代入到V = a (1 - bk )2 ∴ 2 1f j K V V K ??=- ? ?? ? , 又 Q KV = 流量与速度的关系1j Q K V ?= ? 流量与密度的关系 2 1f j K Q V K K ??=- ? ?? ? 4-2 已知某公路上中畅行速度V f = 82 km/h ,阻塞密度K j = 105 辆/km ,速度与密度用线性关系模型,求: (1)在该路段上期望得到的最大流量; (2)此时所对应的车速是多少? 解答:(1)V —K 线性关系,V f = 82km/h ,K j = 105辆/km ∴ V m = V f /2= 41km/h ,K m = K j /2= 52.5辆/km , ∴ Q m = V m K m = 2152.5辆/h (2)V m = 41km/h 4-3 对通过一条公路隧道的车速与车流量进行了观测,发现车流密度和速度之间的关系
解答:35.9ln V k = 拥塞密度K j 为V = 0时的密度, ∴ 180 ln 0j K = ∴ K j = 180辆/km 4-5 某交通流属泊松分布,已知交通量为1200辆/h ,求: (1)车头时距 t ≥ 5s 的概率; (2)车头时距 t > 5s 所出现的次数; (3)车头时距 t > 5s 车头间隔的平均值。 解答:车辆到达符合泊松分布,则车头时距符合负指数分布,Q = 1200辆/h (1)153600 3 (5)0.189Q t t t P h e e e λ- ?-?-≥==== (2)n = (5)t P h Q ≥? = 226辆/h (3)55158s t t e tdt e dt λλλλλ +∞-+∞-??=+=? 4-6 已知某公路 q =720辆/h ,试求某断面2s 时间段内完全没有车辆通过的概率及其 出现次数。 解答:(1)q = 720辆/h ,1 /s 36005 q λ= =辆,t = 2s 25 (2)0.67t t P h e e λ- -≥=== n = 0.67×720 = 483辆/h 4-7 有优先通行权的主干道车流量N =360辆/ h ,车辆到达服从泊松分布,主要道路允许次要道路穿越的最小车头时距=10s ,求 (1) 每小时有多少个可穿空档? (2) 若次要道路饱和车流的平均车头时距为t 0=5s ,则该路口次要道路车流穿越主要道路车流的最大车流为多少?