经验模态分解算法中端点问题的处理
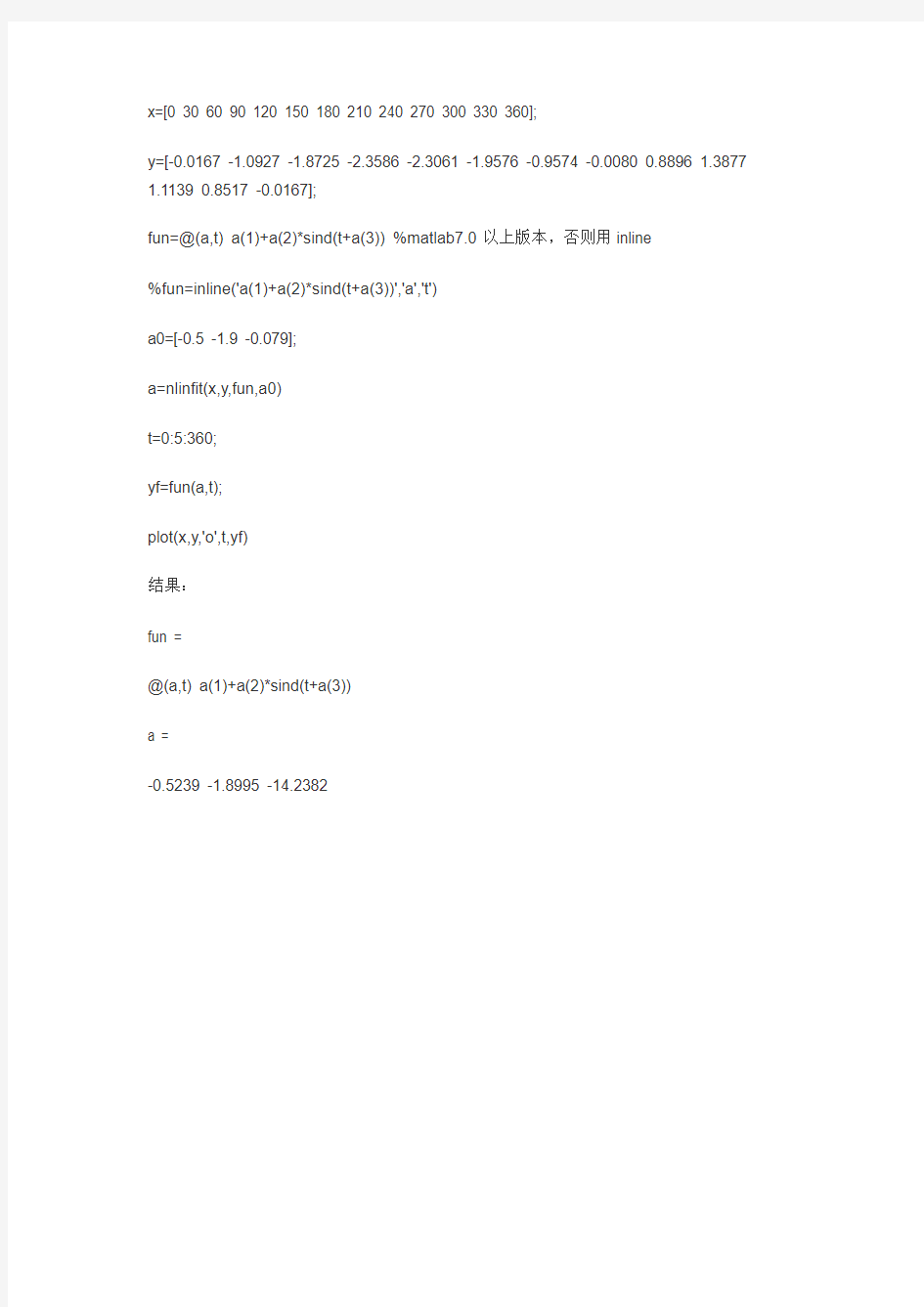
x=[0 30 60 90 120 150 180 210 240 270 300 330 360];
y=[-0.0167 -1.0927 -1.8725 -2.3586 -2.3061 -1.9576 -0.9574 -0.0080 0.8896 1.3877 1.1139 0.8517 -0.0167];
fun=@(a,t) a(1)+a(2)*sind(t+a(3)) %matlab7.0以上版本,否则用inline
%fun=inline('a(1)+a(2)*sind(t+a(3))','a','t')
a0=[-0.5 -1.9 -0.079];
a=nlinfit(x,y,fun,a0)
t=0:5:360;
yf=fun(a,t);
plot(x,y,'o',t,yf)
结果:
fun =
@(a,t) a(1)+a(2)*sind(t+a(3))
a =
-0.5239 -1.8995 -14.2382
经验模态分解算法中端点问题的处理
摘要:经验模态分解(EMD)方法就是对非线性、非平稳信号运用时间区域序列的上下包络线的均值得到瞬时平衡位置,将被分析信号分解成一组相互独立的稳态和线性的固有模态函数(IMF)数集。经验模态分解(EMD)方法是基于原始信号本事出发,经过筛选先把频率高的IMF 分量分离出来,然后在分离频率较低的IMF分量。其实质就是利用时间特征尺度来获取原始信号数据中的振荡模态,本文对经验模态分解算法中端点问题的处理进行研究。
关键词:经验模态分解算法端点函数
经验模态分解(EMD)方法被提出后在各个领域普遍的应用,其具有直观、简单、自适应、完备性和正交性以及调制特性等一系列良好的特点。
(1)自适应性
经验模态分解(EMD)方法的自适应性表现为自适应生成基函数。在整个筛选分解过程中
是根据原始信号自己的时间特征尺度实现的,不需要事先设立任何基函数。这与傅立叶变换和小波变换有着根本性的不同。傅立叶变换和小波变换需要事先设定谐波基函数和小波基函数,他们是先验性的。可以说在理论上,经验模态分解(EMD)方法适用任何信号的分解,其在对非线性、非平稳信号的处理上的优越性是其他时频分析方法无法比拟的。
经验模态分解(EMD)方法的自适应性还表现为自适应滤波特性。经验模态分解方法是基于原始信号本身出发,经过筛选先把频率高的IMF分量分离出来,然后在分离频率较低的工MF分量。这些不同频率成分以及带宽都是随原始信号的变化而改变的。因此,EMD方法可被视为是一组具有自适应性能的带通滤波器,它的截止频率和带宽均随着原始信号的变化而自动改变的,随着信号分析的目的改变而自动变化的。
这些尺度范围和频率成分均随着原始信号的变化而自动改变的,这样原始信号的特征可在不同分辨率下被表示,实现自适应多分辨率。
(2)正交性与完备性
所谓信号分解方法的完备性,是指可以从被分解后的信号的各个分量还原出原始信号的性质。经验模态分解(EMD)方法的本身就已经证明了其是完备的。可以得到证明EMD方法的完备性。且从EMD整个分解过程和结果都说明EMD方法的完备性。
所谓信号的正交性指的是被分解后的信号的各个分量之间相互正交的性质。例如频率不同的两个正弦信号它们是相互正交的。在EMD方法中,根据IMF的概念,每一个IMF分量应该是在局部应该是相互正交的。
此处的正交性是在局部意义上而言的。对于有一些特殊数据,有可能会出现两个相邻的分量在不同的时间段内含有相同的频率成分,因此在全局意义上不正交。由于一般在实际进行经验模态分解时采用的都是截取数据的有限长度,这样即使对于不同频率的纯正弦波形叠加信号进行分解也会有严重泄漏。泄漏的程度一般与数据的长度以及分解的结果是密切相关的。黄通过大量的实验数据证明EMD的泄漏一般小于1%;对于极短的数据为5%,与正弦型傅立叶分解在同一数量级上。据此可以认为EMD分解得到的各个IMF分量近似正交的。
(3) IMF分量的调制特性
由固有模态函数的概念可知,对于任意信号被分解为有限工MF分量,这些分量可以是幅值和频率调制的。任何频率随时间的变化都可定义为频率调制。频率调制有两种概念:一是波间调制;二是波内调制。EMD分解得到的各个IMF分量不仅含有原始信号的非线性以及非平稳特性,而且工MF分量有波内调制特性,能用一个IMT表示由不同傅立叶频率描述的同一分量。
1 经验模态分解和主成分分析
1.1 经验模态分解
经验模态分解算法的主要目的是将待分析信号分解为一系列表征时间尺度的IMF 分量,要求IMF 分量必须满足两个条件:IMF 的极值点个数与过零点个数不超过1;由极大值点和极小值点确定的包络线均值为零.对信号()x t 进行EMD 分解的步骤如下[6]
:
Step1 确定()x t 的所有极大值和极小值,分别对极大值点和极小值点进行三次样条插值,构
造()x t 的上下包络线()x up t 和()x low t ,计算上下包络线的均值
1()(()())/2up low t t t =+m x x ;
Step2 计算()x t 和()m t 之间的差值, 11()()()t t t =-g x m ; Step3 判断1()t g 是否是一个IMF,
3.1) 如果1()t g 符合IMF 的定义条件,是一个IMF ,则抽取1()t g 作为第一个IMF 分量,
令11()()imf t g t =,并求原信号与1imf 之间的差值1()r t , 11()()()r t x t imf t =-。
3.2) 如果1()t g 不是一个IMF,则将1()t g 视为一个新的信号序列,重复步骤1和步骤2,
求其包络均值11()t m 及1()g t 与11()m t 间的差值11()g t 。对11()g t 重复上述过程n 次,直到1()n g t 符合IMF 的定义条件,则令11(1)1()()n n n g t g t m -=-为()x t 的第一个IMF 分量,并求原信号与1imf 之间的差值1()r t , 11()()()r t x t imf t =-;
Step4 将1()r t 作为一个新的“原始”信号,重复步骤(step1-step3),抽取第2个内蕴模
态函数分量2imf ,令212()()(
)r t r t imf t =-;将2()r t 作为一个新的“原始”信号,抽取第3个内蕴模态函数分量3i m f ,
;以此类推,直到第K 次的余项
(1)K K k r r i m f -=-满足终止条件,则停止迭代,()x t 的EMD 分解完成。
EMD 分解结束后,原始信号()x t 可被表示为各IMFs 和一个余项之和:
1
()()()
x imf r K
k K k t t t ==+∑
其中imf k 表示第k 个IMF 分量.如果()x t 被零均值高斯白端点污染,则imf k 中所含端点仍近似服从零均值正态分布
[14]
,即可设
imf k
y n k k
=+
(1)
其中y k 表示没被污染的原始信号,n k 表示所含端点,且n k ~2
(0,)k N σ.对于含随机端点的信号,先分解出的IMF 分量通常对应于信号的高频端点,若去除几个先分解出的IMF,把剩余IMF 进行重构,则可减弱信号的端点.
1.2 主成分分析
主分量分解(PCA)是统计分析中常用的多通道数据分析方法
[15]
,被广泛应用于数据的降
维和端点处理中.设M 道原始数据构成一个N M ?的数据阵(
)
12
,,
,T T
T T M =X x x x
,令
()x x x i i i E =-,其中()x i E 为x i 的期望,记()12,,
,T
T T
T M =X x x x ,则X 的协方差矩阵为
())T M M M N N M E ???=C (X)(X ,通过奇异值分解(SVD),协方差矩阵C M M ?可被写为
)T M M M M M M M M ????=C U Λ(U
这里()12,,,ΛM diag λλλ=为对角矩阵,M λλλ≥≥≥ 21为C 的特征
值,()12,,
,M =U u u u 为特征值所对应的特征向量组成的正交矩阵.令
(T M N M M M N
???=P U )X
(2)
称(
)12,,
,T
T T
T M =P p p p 的各行为X 的主分量,它们在P 中依贡献率大小排序.p i 对应的特
征值与特征值总和的比∑=M
i i i
1
λλ称为该主分量的贡献率,表征该主分量代表原始信号能量
的百分比.如果仅取前H 个主分量(
)
12
,,,,,
,T
T
T T T
T H
=P p p p 00
重构原始数据,则重构的
数据为
X U P M N M M M N ???= 端点信号在经PCA 处理时,由于1,
,H M λλ+对应的主分量1,,p p H M +包含了信号中的大部分端点,在重构时直接丢掉;而代表了信号主要特征的主分量1,,p p H 被保留,因而PCA 可
以有效的端点处理.
2 利用3σ准则提取1imf 中的细节信息
在最初的EMD 端点算法中,通常认为第一层端点IMF 全部由端点构成,并由此出发推导其他层IMF 中所含端点的能量.但随着研究的深入,逐渐发现1imf 中仍含有一定量的信号细节信息
[12,13]
.对1imf 进行适当的处理,提取其所含的信号细节信息并加以保留,会提高端点效
果,利用处理后的1imf 估计其余IMF 中所含端点的能量也更准确.但由于先验知识很少,所以对1imf 进行处理是个难题.由EMD 的研究可知,在1imf 中端点占绝大部分,而仅含有少量的信号细节信息,而且所含端点仍近似服从零均值正态分布,所以非常适合采用“3σ法则”进行细节信息提取
[16]
.由公式(1)可知,
1imf 满足加性端点模型
1imf 11y n =+ 且1n ~2
1(0,)N σ.根据“3σ”法则,端点1n 的分布满足
{}11|[]|399.73%n P i σ≤=
即端点1n 落在11[3,3]σσ-之间的概率为0.9973,而落在31σ之外的概率仅约为0.003.因此如果1[]imf i 的值没有落在11[3,3]σσ-之内,则可认为1[]imf i 中必然含显著误差,也即有必然含有信号信息1y ,需要予以保留.利用“3σ法则”对1imf 进行细节信息提取可表示为:
{
11111[],([])3[]0([])3d 1imf imf imf ,imf i if abs i i if abs i σσ≥=
<
其中d
1imf 表示从1imf 提取出的信号细节;端点方差2
1σ采用文献[17]中提出的方法进行估计,即21()
0.6745
HH Median σ=
,这里HH 表示1imf 的高频子带小波系数.
3 各层IMF 中所含端点能量的估计
利用“3σ法则”对1imf 进行细节信息提取后,可求出1imf 中所含端点的能量]
1[W [18]
:
2
11
11
111
[1]()()([][])imf imf imf imf imf imf M
d
d T d i W i i ==--=-∑
(3)
假设imf k (2≥k )中所含端点的能量为][k W ,则][k W 是未知的,由于信号和端点混杂在
一起,因此一般情况下并不能求出][k W .但通过含噪信号经EMD 分解后的端点能量模型,可对][k W 进行近似计算.被白端点污染的信号经EMD 分解后,如果第一层内蕴模态函数1imf 中所含端点的能量为]1[W ,则imf k 中所含的端点的能量][k W 可由下式求出[18]
,
][k W k
W ρβ
]
1[=
,
2≥k
(4)
其中719.0≈β,01.2≈ρ.因此,求出1imf 中所含端点的能量]1[W 后, 即可通过公式(4)估计imf k 中所含端点的能量][k W .
4 根据端点能量利用PCA 去除imf k (2≥k )中的端点
PCA 是一种自适应的分解方法,信号经PCA 分解后各主分量间互不相关,而且按照贡献率选择合适主分量重构后,能有效端点处理并保留信号绝大部分的主特征信息. imf k
(2≥k )经PCA 分解后,信号和端点能够被有效分离,如果想较好去除imf k 中端点,必须要选
择合适个数的主分量进行重构,通常根据前H 个主分量的累计贡献率?
?
? ??=∑∑==N
i i H
i i
r 1
1
λλ来确定保留的主成分分量的个数.但累积贡献率r 的选择并不是一个简单的事情:1)累计贡献率r 取得太大,会残留较多的端点,导致端点不能完整的去除;累计贡献率r 取得太小,又会损失较多的信号细节信息;2) 每一层端点项IMF 中所含端点的强度并不相同,因此在对不同层的IMF 进行PCA 端点时,累计贡献率r 不能取固定的值.为了更好地端点处理,本文根据
k imf 中所含端点能量的比例,提出了一种自适应确定累计贡献率r 的方法.
由公式(1)可知 imf y n k k k =+,()0n k E =,(2≥k ).为了表示方便,设
X =imf T k k ,()
()X =imf imf X X T T k k k k k E E -=-,()
X C X X k T
k k E =为X 的协方差矩
阵,其中M 表示k imf 的长度,显然X k 所含端点与imf T
k 所含端点相同.假设X k 经PCA 分解后的主分量为(
)
12,,
,T
T T
T M =P p p p ,如果选择前H 个主分量
()12,,
,,,
,T
T
T T T
T H =P p p p 00进行重构以去除X k 中的端点,则可得到端点后的信号
X UP
k =()()121
1
,,
,,
,,,
,H
T
T
T T
T
M H
i i
i ===∑u u u p p 00
u p
(5)
此时从X k 中删除的端点为
1
ΔX X X u p
M
k k k i
i
i H =+=-=
∑
(6 )
设X k 和ΔX k 的能量分别为()X ε、
()ΔX ε.在PCA 端点中,通常认为前几项主分量包含了信号的主要特征信息,而比较靠后的主分量主要由端点构成,而且按照主分量对总能量的贡献率选择应保留的主分量个数.因此在利用PCA 对X k 端点时,如果选择合适的H ,使删除的端点ΔX k 的能量与X k 本身所含的端点能量相同,也即使得
()ΔX k ε[]W k =
则可认为X k 中的端点基本被全部去除,达到了较好的端点效果.上式等价于
()[]
()()
ΔX X X k k k W k εεε=
(7)
由公式(2)和U 的正交性可知:X k UP =1
u p
M
i i
i ==
∑,p u X T
i i k =,所以信号X k 的能量为:
()X X X T
T
k k
ε==11()()u p u p N
N
T
i i j j i j ==∑∑11p u u p N N
T T i i
j j i j ===∑∑21p N
i
i ==∑1
p p N
T
i i i ==∑
1
u X X u N
T T i
k k
i
i ==∑1
(1)X u C u N
T i i
i N ==-∑1
(1)N
i
i N λ==-∑
(8)
而所删除的端点ΔX k 的能量可表示为
()()ΔX ΔX ΔX T
k k k ε==
11
p u u p
N N
T T i
i
j
j
i H j H =+=+∑∑1
p p
N
T i
i
i H =+=
∑1u
X X u N
T T i k k i
i H =+=
∑
1
(1)
X
u C
u N
T i
i
i H N =+=-∑1
(1)
N
i
i H N λ
=+=-∑
(9)
由公式(8)和(9)可知,被删除端点ΔX k 的能量与X k 的能量之比为
1
1
()()ΔX X N
N
k i i i H i k ελλε=+=??
= ???
∑∑.
所以,为了使X k 中的端点被完整去除,应选择合适的H 使11N
N
i
i i H i λλ=+=?? ???∑∑[]()X k
W k ε=
成立 .但在选择H 时,很难保证使得1
1N
N
i
i i H i λλ=+=?? ???∑∑[]
()X k
W k ε=
恰好成立,本文中对H 按照以下方法进行取值:如果存在β使得式(10)成立, 则令β=H ,
1
1N
N
i i i i βλλ=+=?? ???
∑∑[]
()
X k W k ε≤≤1N N
i i i i βλλ==?? ???
∑∑
(10)
应保留的主分量个数H 确定后,根据公式(5)可求出X k 端点后的信号X k ,因为
(
)
X =i m f i m f T
T k k
k
E -,所以k imf 端点后的值为:()()
imf X imf T
d T k d k E =+.
本文所提出的基于PCA 的EMD 端点算法具体步骤为:
Step1 对信号()x t 进行EMD 分解,设分解后的IMF 为1imf ,…, k imf ,余项为r K ; Step2 对1imf 采用“3σ法则”提取信号细节信息,设提取的细节信息为1imf d
; Step3 根据公式(3)求1imf 所含端点的能量,并利用公式(4)估计k imf (2≥k )中所含端点的能量;
Step4 对k imf (2≥k )进行PCA 分解,根据公式(10)选择合适个数的主分量进行重构端点,设k imf 端点后的值为imf d
k ;
Step5 累加全部imf d
k (K k ≤≤1)和余项r K ,得到端点后信号()x t . 5 实验结果与分析
当一维信号长度M 较大时,其协方差矩阵M M C ?的规模较大,直接进行PCA 变换运算量很大.为了降低运算复杂度,本文按照文献[19]中所提出的嵌入方法首先将一维信号转换为多维信号后,再进行PCA 分解,此时分解结果的特征和性质均保持不变.为了分析所提出算法的端点性能,分别对模拟信号和真实信号进行端点实验.模拟信号利用Matlab 中的wnoise 函数生成,分别生成“Blocks ”,“Bumps ”,“Heavy sine ”和“Doppler ”等四类具有典型特征的测试样本;真实信号选择来自Bell 实验室的一段电力系统信号. 为了对比端点效果,对端点信号分别采用基于Bayesian 阈值的小波端点法(Bayesian-Wavelet)、基于模态单元的EMD 阈值法(Mode-EMD)和本文提出的基于PCA 的EMD 端点法 (PCA-EMD) 进行端点. 在利用Bayesian-Wavelet 法进行端点时,小波基选用“db8”小波,分解层数取为10;在Bayesian-Wavelet 和Mode-EMD 的端点中,均采用硬阈值法. 本文采用均方误差MSE 和信噪比SNR 来评估算法的性能:信噪比越大,均方误差越小,表明端点效果越好.
5.1 对模拟信号的端点
在对模拟信号的实验中,首先利用wnoise生成信噪比分别为SNR=0,5dB,10,15,20dB的测试信号,信号长度L取为4096. 图1是SNR=5dB时,测试样本“Doppler”及不同方法端点后的实验结果,在图1(c)-(f)中,虚线为原始信号,实线为端点后信号.对3种方法端点后的结果分别计算MSE和SNR(见表1).可以看出,在当SNR=5dB时,“Doppler”信号经PCA-EMD 方法端点后效果相对较好,与Bayesian-Wavlet算法相比,SNR提高了2.509,MSE约减小了0.053;与Mode-EMD算法先比,SNR约提高了1.529,MSE约降低了0.017.
不同信噪比的模拟信号经三种方法端点后的MSE和SNR如表1所示,通过比较可知,本文提出的PCA-EMD方法总体端点效果要优于Bayesian-Wavelet方法和Mode-EMD方法,端点后的信号更接近原始信号;但当信噪比增大时,PCA-EMD与Mode-EMD之间的差距在逐渐减小,当信噪比增加到20dB时,本文方法与Mode-EMD算法的端点结果已非常接近.
(a)
(b)
(c)
(d)
(e)
Fig.1 Doppler signal de-noising results comparison (a)Original Doppler signal
(b)noisy Doppler signal (d) Bayesian Wavelet de-noising result (d)Mode-EMD
de-noising result (e) PCA-EMD de-noising result 图1 Doppler信号的端点结果比较 (a)原始Doppler信号 (b)含噪Doppler信号 (c) Bayesian Wavelet端点 (d) Mode-EMD端点 (e)PCA-EMD端点
Table 1 Results of experiments using noisy simulated signals
5.2 对实际电力信号的端点
图2(a)是在有端点干扰的环境下采集到的一段电力系统信号,对该信号分别利用三种方法进行端点,端点后的结果如图2(b)-(d)所示.从图2可以看出,PCA-EMD端点后信号的细节和突变部分保持较好,与Bayesian-Wavelet和Mode-EMD端点结果相比,端点明显有所减少.分别计算各端点信号的MSE和SNR,结果如下:Bayesian-wavelet端点后,MSE=81.8073,SNR=32.023;Mode-EMD端点后,MSE=73.0587, SNR=32.5142,;PCA-EMD端点后,MSE=70.9869,SNR=32.6391.可以看出,PCA-EMD方法端点后的MSE最小,而SNR最大.这表明电力信号经PCA-EMD方法端点后,信号细节的保留程度和信号的复原程度都更好一些.可见,对实际信号进行端点时,PCA-EMD方法与Bayesian-Wavelet和Mode-EMD方法相比,端点能力也有一定程度的提高,是一种比较有效的端点方法.
实验在matlab7.8.0环境下进行, 计算机内存为2G,cpu主频为3.06GHz, EMD采用flandrin 提供的pack_EMD (http://perso.ens-lyon.fr/patrick.flandrin/emd.html)。统计Doppler,Heavy Sine, Bumps,Blocks以及实际电力信号的端点时间开销:本文方法的平均时间开销约为0.032943秒;Mode-EMD算法的平均时间开销约为0.029326秒。本文方法的时间花费比Mode-EMD算法约高12%,运算量没有明显增加。
(a)
(b)
(c)
(d)
Fig.2 Electric signal de-noising results comparison (a) original electric signal (b)Bayesian Wavelet de-noising result (c)Mode-EMD de-noising result (d)PCA-EMD
de-noising result
图2 电力信号的端点结果比较 (a)原始电力信号 (b)Bayesian Wavelet小波端点
(c)Mode-EMD端点 (d)PCA-EMD端点
6 结束语
为了提高EMD的端点效果,本文提出了一种基于PCA的EMD端点新方法.在所提出的方法中,首先利用“3 法则”对第一层IMF进行信号细节信息提取,并计算各层IMF中所含端点的能量;然后利用PCA对各IMF进行端点,端点时根据每层IMF中所含端点的能量自适应的确定应保留的主分量的个数. 为了验证所提算法的性能,选择了基于Bayesian阈值的小波方法和基于模态单元的EMD阈值方法进行比较.首先采用含不同强度端点的模拟信号进行实验,实验结果表明,所提算法的端点效果整体优于小波方法和基于模态的EMD方法.而对含噪电力信号进行端点实例应用,也进一步验证了本文方法的有效性.
参考文献:
D. L. Donoho. De-noising by soft-thresholding. IEEE Transaction on Information Theory, 1995,41(3):613–627.
A. Pizurica and W. Philips. Estimating the probability of the presence of a signal of interest in multiresolution single and multiband image denoising. IEEE Transaction on Image Processing, 2006, 15(3):654–665.
J. Portilla, V. Strela, M. J. Wainwright, and E. P. Simoncelli. Image denoising using scale mixtures of gaussians in the wavelet domain. IEEE Transaction on Image Processing, 2003, 12(11):1338–1351.
L. Zhang, P. Bao, and X. Wu. Multiscale LMMSE-based image denoising with optimal wavelet selection. IEEE Trans. Circuits Syst.Video Technol., 2005,15(4):469–481.
Zhang Hua, Chen Xiaohong, Yang Haiyan. Optimistic wavelet basis selection in seismic signal noise elimination. OGP, 2011, 46(1):70-75.
Huang N E, Shen Z, Long S R, etc. The empirical mode decomposition and the Hilbert spectrum for nonlinear and nonstationary time series analysis[J]. Proc. of the Royal
Society of London,1998, A454: 903?995.
Xu Xiaogang, Xu Guanlei, Wang Xiaotong, etc. Empirical mode decomposition and its application. Acta electronica Sinica, 2009, 37(3):581-585.
Boudraa A, Cexus J. EMD-based signal filtering[J]. IEEE Transaction on Instrumentation and Measurement, 2007, 56(6):2196-2202.
Gan Yu, Sui Lifen. De-noising method for gyro signal based on EMD. Acta Geodaetica et Cartographica Sinica,2011,40(6):745-750.
Olufemi A, Vladimir A, Auroop R. Empirical mode decomposition technique with conditional mutual information for denoising operational sensor data[J]. IEEE Sensors Journal, 2011, 11(10):2565-2575.
Zhao Zhihong, Yang Shaopu, Shen Yongjun. Improved EMD based on de-noising method. Journal of Vibration and Shock, 2009,28(12):35-37.
Qu Congshan, Lu Tingzhen, Tan Ying. A modified empirical mode decomposition method with applications to signal de-noising. Acta Automatica Sinica, 2010, 36(1):67-73. Y.Kopsinis, S.Mclaughli. Development of EMD-based denoising methods inspired by wavelet thresholding[J]. IEEE Transactions on Signal Processing, 2009,57(4):1351-1362. Zhaohua Wu, Norden E H. A study of the characteristics of white noise using the empirical mode decomposition method[J]. Proc. R. Soc. Lond. A8, 2004, 460 (2046):1597-1611.
Lei Zhang, Rastislav L, Wu Xiaolin. PCA-based Spatially Adaptive Denoising of CFA Images for Single-sensor Digital Cameras[J]. IEEE Trans on Image Processing, 2009,18(4): 797-812.
Wang Hongbao. Electronic measuring. Science Press, 2005, Beijing.
Johnstone I, Wilverman B. Wavelet threshold estimators for data with correlated noise[J]. Journal of the Royal Statistical Society. Series B (Methodological), 1997,59(2):319-351. Flandrin P, Riling G, Goncalves P. Empirical mode decomposition as a filter bank[J]. IEEE Signal Processing Letters, 2004, 11(2): 112-114.
A.R.Teixeira, A.M. Tome, K.Stadlthanner, etc. KPCA denoising and the pre-image problem revisited[J]. Digital Signal Processing, 2008, 18(4):568-580.
基于经验模态分解的探地雷达信号去噪处理(精)
基于经验模态分解的探地雷达信号去噪处理 杨建军刘鸿福 (太原理工大学太原 030024 【摘要】探地雷达作为一种先进的地球物理探测方法,具有探测效率高、操作简单、采样迅速、无损伤探测、探测分辨率高等优点。探地雷达的信号的去噪问题已成为一个公认的技术难题。本文用经验模态分解的方法对探地雷达信号进行信号去噪处理,并取得了良好的效果。 【关键词】探地雷达;经验模态分解;信号去噪 1引言 探地雷达又称地质雷达 ,是近几年迅速发展起来的一种高分辨高效率的无损探测技术。探地雷达通过天线向地下发射高频电磁脉冲波 ,电磁波在地下介质传播过程中 ,当遇到存在电性差异的地下目标体,如空洞和分界面时,电磁波便会发生反射,返回到地面时由接收天线所接收。在对接收到的雷达波信号处理和分析的基础上,根据信号的波形、振幅和双程走时等参数便可推断地下目标体的空间位置、结构、电性及几何形态,从而达到对地下隐蔽目标体的探测目的。 信号处理是探地雷达技术中的研究重点之一, 其目的是以高的分辨率在探地雷达显示设备上显示反射波图像,提取反射波的振幅、相位和频率等各种有用的参数,帮助解释地质结构信息。 2固有模态函数 由于大多数信号或数据不是固有模态函数, 在任意时刻数据可能包含多个振荡模式, 这也解释了为什么简单的 Hilbert 变换不能给出一个普通信号的频率内容的完整描述。所以必须把数据分解成固有模态函数,从物理上定义一个有意义的瞬时频率的必要条件是:函数对称于局部零均值,且有相同的极值和过零点。据此,Huang 提出了固有模态函数的定义。一个固有模态函数是满足如下两个条件的函数:
(1在整个数据序列中,极值点的数量与过零点的数量必须相等,或最多相差不能多于一个。 (2在任一时间点上,信号的局部极大值和局部极小值定义的包络平均值为零。 第一个限定条件是非常明显的;它近似于传统的平稳高斯过程关于窄带的定义。第二个条件是一个新的想法;它把传统的全局限定变为局部限定。这种限定是必须的,它可去除由于波形不对称而造成的瞬时频率的波动。采用固有模态函数(以下简称 IMF这个名称是因为它代表了信号数据中的振荡模式。IMF 在按过零点定义的每一个周期中,只包括一个本征模态的振荡,没有复杂的叠加波存在。如此定义,一个基本的 IMF 并不限定为窄带信号,也可以是幅度调制和频率调制的。事实上,它可以是非平稳的。图 1是一个典型的 IMF 。固有模态函数(IMF概念的提出使得用 Hilbert 变换定义的瞬时频率具有实际的物理意义, 而提出 IMF 分量的 EMD 分解方法的出现则使瞬时频率可用于复杂的非平稳信号的分析。图 1所示为一典型的固有模态函数,具有相同数目的过零点和极值点,上下包络关于零值对称。 图 1一个典型的固有模态函数(Huang 3经验模态分解
EMD经验模式分解信息汇总资料
EMD Empirical Mode Decomposition 经验模态分解 美国工程院院士黄锷1998年提出 一种自适应数据处理或挖掘方法,适用于非线性、非平稳时间序列的处理。 1.什么是平稳和非平稳 时间序列的平稳,一般是宽平稳,即时间序列的方差和均值是和时间无关的常数,协方差与与时间间隔有关、与时间无关。未来样本时间序列,其均值、方差、协方差必定与已经获得的样本相同,理解为平稳的时间序列是有规律且可预测的,样本拟合曲线的形态具有“惯性”。 而非平稳信号样本的本质特征只存在于信号所发生的当下,不会延续到未来,不可预测。 严格来说实际上不存在理想平稳序列,实际情况下都是非平稳。 2.什么是EMD经验模态分解方法? EMD理论上可以应用于任何类型时间序列信号的分解,在实际工况中大量非平稳信号数据的处理上具有明显优势。这种优势是相对于建立在先验性假设的谐波基函数上的傅里叶分解和小波基函数上的小波分解而言的。EMD分解信号不需要事先预定或强制给定基函数,而是依赖信号本身特征自适应地进行分解。 相对于小波分解:EMD克服了基函数无自适应性的问题,小波分析需要选定一个已经定义好的小波基,小波基的选择至关重要,一旦选定,在整个分析过程中无法更换。这就导致全局最优的小波基在局部的表现可能并不好,缺乏适应性。而EMD不需要做预先的分析与研究,可以直接开始分解,不需要人为的设置和干预。 相对于傅里叶变换:EMD克服了传统傅里叶变换中用无意义的谐波分量来表示非线性、非平稳信号的缺点,并且可以得到极高的时频分辨率。 EMD方法的关键是将复杂信号分解为有限个本征模函数IMF,Intrinsic Mode Function。分解出来的IMF分量包含了原信号的不同时间尺度上的局部特征信号。 这句话中:不同时间尺度=局部平稳化,通过数据的特征时间尺度来获得本征波动模式,然后分解or筛选数据。 本质上,EMD将一个频率不规则的波化为多个单一频率的波+残波的形式。 原波形=ΣIMFs+余波 信号()t f 筛选出的本征模函数IMF包括余波,对应有实际的物理成因。 现实中的信号分量IMF不会保持完全稳定的频率和振幅,也常常无法从各个分量中直接看出信号规律。EMD分解经常被用作信号特征提取的一个预先处理手段,将各IMF分量作为后续分析方法的输入,以完成更加复杂的工作。 3.IMF的筛选过程 第一步: Get原数据曲线f(t)所有极大值点,三次样条插值函数拟合成原数据的上包络线; Get原数据曲线f(t)所有极小值点,三次样条插值函数拟合成原数据的下包络线。
经验模式分解算法的探讨和改进
第46卷 第1期2007年 1月中山大学学报(自然科学版) ACT A S C I E NTI A RUM NAT URAL I U M UN I V ERSI T ATI S S UNY ATSE N I Vol 146 No 11 Jan 1 2007 经验模式分解算法的探讨和改进 3 郑天翔,杨力华 (中山大学科学计算与计算机应用系,广东广州510275) 摘 要:对经验模式分解算法中的滤波停止条件和端点延拓问题进行了研究。在改进的E MD 算法基础上,通 过对本征模函数使用“新的滤波停止条件”,获得了更好的实验分解结果,同时,由于改进的E MD 算法假定信号是无限长的,回避了B 样条插值中节点延拓的固有问题,研究了有限长度信号的端点延拓问题,给出了端点延拓算法,从而弥补了已有方法的不足,使之更具实用性。实验表明,文中提出的算法是有效的。 关键词:经验模式分解;端点延拓;本征模函数;滤波停止条件;B 样条插值中图分类号:TP274 文献标识码:A 文章编号:052926579(2007)0120001206 H ilbert 2Huang Transfor m (简称HHT )是近年 来发展起来的一种新的时间序列信号分析方法[1] (以下简称H98)。其核心是经验模式分解(E mp ir 2icalMode Decompositi on,E MD ),它把复杂的信号分解成若干个本征模式函数(I ntrinsic Mode Func 2ti on,I M F )之和。由于E MD 是自适应的,故其分解非常有效,尤其适用于非线性和非平稳过程分析。 HHT 自1998年由N 1Huang 及其合作者提出以来,一直受到国内外学者的关注,并取得了一系列的研究成果。Huang 所提出的E MD 是算法型的,虽然该算法在实际信号分解中十分有效,但迄今为止并没有关于该算法的收敛性结果。实际上,人们在利用E MD 进行信号分解时,有两个方面是采取了主观的规则:其一是根据人们对零均值条件的主观理解,使用了特定的门限作为I M F 滤波停止条件;其二是利用三次样条计算信号的上、下包络时,根据人们对信号两端走势的主观经验,使用了特定的端点延拓方法。当使用E MD 时,在上述两点上使用不同的规则将导致不同的分解结果。 Huang 等[1] 在提出E MD 算法时给出了较好的I M F 滤波停止条件,然而该算法依然存在某些方面的不足,为了使用尽量合理的I M F 滤波停止条件, 2003年R illing 等[2] 对文[1]中的E MD 算法进行了改进,提出一种“新的I M F 滤波停止条件”。实验结果表明,该改进算法可以获得更好的分解结果。 为了从理论上有效解决E MD 算法的边界效应,许多学者对端点延拓问题作了研究,这些工作包括 2001年邓拥军等[3] 提出的神经网络方法、2003年 黄大吉等[4] 提出的镜像闭合法和极值点延拓法及 2004年刘慧婷等[5] 提出的多项式拟合算法等。 另外,为了得到E MD 算法的解析表示,2004 年Chen 等[6] 提出了“直接采用基于极值点滑动平 均的B 样条函数的线性组合作为均值” (滑动平均)的方法代替传统的“用极值点插值的三次样条函 数分别得到信号的上下包络从而求得均值” (包络平均)的方法。该方法获得了较好的实验结果,尤其重要的是,借助B 样条函数已有的良好性质,可以为E MD 算法中信号的低频走势(其定义参见本文§111)给出明确的解析表达式,从而为建立E MD 方法的理论基础进行了有益的探索。 但文[6]并没有讨论I M F 的滤波停止条件问题,也没有考虑E MD 算法的端点延拓问题,在那里,信号被假定是无限长的,这对实际的信号分析和处理带来不便。本文将在这两方面对文[6]中的算法进行研究。 1 E MD 方法简介 111 原始E MD 算法的基本思想 E MD 算法本质上是一个有限次的滤波过程(sifting p r ocess ),使得信号具有如下两个特性:①极值点(极大值和极小值)数目与跨零点数目相 等或最多相差一个(以下简称过零点条件);②由局部极大值构成的上包络和由局部极小值构成的下包络的平均值为零(以下简称均值条件)。满足上述特征的信号就称为一个I M F 。 E MD 方法的滤波过程[1] 可写成如下的算法: 3收稿日期:2006202222 基金项目:国家自然科学基金资助项目(60475042,10631080) 作者简介:郑天翔(1979年生),男,博士生;通讯联系人:杨力华;E 2mail :mcsylh@mail 1sysu 1edu 1cn
经验模态分解和算法
经验模态分解和算法 摘要——黄提出了经验模态分解(EMD)的数据处理方法,也对这种技术应用的有效性进行了讨论。许多变种算法(新的停止准则,即时版本的算法)也产生出来。数值模拟用来作经验性的评估执行单元运用于语音识别和分离方面,得出的实验结果认为这种方法是根据自适应的常数Q的滤波器组提出的。 1.介绍 近来,一种被称为EMD的新的非线性方法被黄等人提出,这种方法能够自适应的把非平稳信号分解成一系列零均值的AMFM信号(调频调幅) 的总和。尽管这种方法经常有着显著的效果,但是这个方法在算法方面的定义是困难的,因此这种方法没有作为一种分析方法得到承认,一般一种分析方法是需要有理论分析和性能评估。因此本文的目的是用实验的方式使得该算法更容易理解,并且提出了基于原算法的各种各样的改进的算法。设置实验性能评估的许多初始条件是为了获取一种有效的分解并且使得该算法更容易理解。 2.EMD基础 EMD的出发点是把信号内的震荡看作是局部的。实际上,如果我们要看评估信号x(t)的2个相邻极值点之间的变化(2个极小值,分别在t-和t+处),我们需要定义一个(局部)高频成分{d(t),t-<=t<=t+}(局部细节),这个高频成分与震荡相对应,震荡在2个极小值之间并且通过了极大值(肯定出现在2极小值之间)。为了完整这个图形,我们还需要定义一个(局部)低频成分m(t)(局部趋势),这样x(t)=m(t)+d(t),(t-<=t<=t+)。对于整个信号的所有震动成分,如果我们能够找到合适的方法进行此类分解,这个过程可以应用于所有的局部趋势的残余成分,因此一个信号的构成成分能够通过迭代的方式被抽离出来。 对于一个给定的信号x(t),进行有效的EMD分解步骤如下: 1)找出想x(t)的所有极值点 2)用插值法对极小值点形成下包络emint(t),对极大值形成上包络emax(t) 3)计算均值m(t)=(emint(t)+emax(t))/2 4)抽离细节d(t)=x(t)-m(t) 5)对残余的m(t)重复上诉步骤 在实际中,上述过程需要通过一个筛选过程进行重定义,筛选过程的第一个迭代步骤是对细节信号d(t)重复从1-4步,直到d(t)的均值是0,或者满足某种停止准则才停止迭代。一旦满足停止准则,此时的细节信号d(t)就被称为IMF,d(t)对应残量信号用第5步计算。通过以上过程,极值点的数量伴随着残量信号的产生而越来越少,整个分解过程会产生有限个模函数(IMF)。 模函数和残量信号可以进行谱分析,但是这个谱分析不能从狭隘的角度来看。首先,需要强调一下,即使是谐振荡,应用上述方法产生的高频和低频也只是局部的,没办法产生一个预设的频带过滤(例如小波变换)进行辨识。选择的模函数对应了一个自适应(依赖于信号自身的)的时变滤波器。一个这方面的例子:一个信号由3个部分组成(这3个部分是时间频率上都明显叠加的信号),用上述方法成功的分解了。分解如图1所示。这个例子的程序是emd_fmsin2.m 另外一个例子(emd_sawtooth.m)强调了EMD潜在的非谐振性质如图2所示。在这些例子中,线性的非线性的震荡都能被有效的识别和分离。因而,任何谐振分析(傅里叶,小波,…)可能结束在同类文章中,更少的紧凑和更少的实际意义的分解。 3.算法的改进 正如第二部分所定义的,EMD算法依赖于一系列的选项,这些选项需要用户控制,并且需要专业的知识。在此我们的目的找出更准确的选项,并且给予原来的算法进行改进。3.1采样率,插值方法和边缘效应
二维经验模态分解的关键问题
Key Problems of Bidimensional Empirical Mode Decomposition Guangtao Ge School of Information and Electronic Engineering Zhejiang Gongshang University Hangzhou, China ggtggtggt@https://www.360docs.net/doc/f516787975.html, Guangtao Ge Department of Information Science & Electronic Engineering Zhejiang University Hangzhou, China ggtggtggt@https://www.360docs.net/doc/f516787975.html, Abstract—In recent years , an emerging theory of Empirical Mode Decomposition (EMD) is an important breakthrough in the field of signal processing. This paper reviews three key problems in the development of the Bidimensional Empirical Mode Decomposition (BEMD) theory and introduces the latest developments of surface-fitting algorithms, boundary corruption solution methods and the BEMD criterion for stopping the sifting process. Then this paper also comments several open problems in BEMD theory and discusses the existing difficult problems . Keywords-component; Bidimensional Empirical Mode Decomposition; surface-fitting; boundary corruption; BEMD criterion 二维经验模态分解的关键问题 葛光涛1, 2 1.浙江工商大学信息与电子工程学院,杭州,中国,310018 2. 浙江大学信息与电子工程学系,杭州,中国,310027 ggtggtggt@https://www.360docs.net/doc/f516787975.html, 【摘要】近年国际上出现的经验模态分解理论(Empirical Mode Decomposition , EMD)是信号处理领域的一个重大突破。本文综述了二维经验模态分解(Bidimensional Empirical Mode Decomposition , BEMD)理论发展过程中涉及的三个关键问题,并着重介绍了曲面拟合、边界污染处理和停止准则制定这三个方面的最新进展,评述了其中的公开问题,对研究中现存的难点问题进行了探讨。 【关键词】二维经验模态分解;曲面拟合;边界污染;停止准则 1 引言 1998 年美国国家宇航局(NASA)的Norden E.huang等人首次提出对一列时间序列数据先进行经验模态分解(以Empirical Mode Decomposition表示 , 简写作EMD),然后对各个分量作希尔伯特变换。这种变换被称为希尔伯特黄变换(Hilbert-Huang transform, HHT)[1,3]。这种信号处理方法被认为是近年来对以傅立叶变换为基础的线性和稳态谱分析的一个重大突破。该方法从本质上讲是对一个复杂的信号进行平稳化处理[2],其结果是将信号中不同尺度的波动或趋势逐级分解开来,由于这种分解是基于局部特征尺度,作为一种完全的数据驱动方法,它具有良好的局部适应性,因此,该方法既能对平稳信号进行分析,又能对非平稳信号进行分析。 以往很多的一维信号处理方法被成功地推广到空间二维信号处理领域,被应用于二维图像数据的处理时同样可以得到良好的效果[4]。例如,傅立叶变换、离散余弦变换以及小波变换等信号处理的技术已经广泛应用于数字图像处理领域,具体应用包括图像滤波、图像复原、图像增强、图像拼接、图像压缩以及数字水印等方面。经验模态分解方法在一维信号处理方面已经获得巨大的成功,所以如果能将一维经验模式分解方法推广到二维,将会给图像处理等领域提供一种新的有效的数据处理手段。 二维经验模态分解理论的发展过程中主要涉及以下几个重要问题[5]:曲面的精确拟合,边界污染的克服,合理停止准则的制定等。 2010 International Conference on Remote Sensing (ICRS) 978-1-4244-8729-5/10/$26.00 ?2010 IEEE ICRS2010
经验模态分解及其雷达信号处理
0引言 当今信息时代,快速、高效的数据处理技术在科学研究、 工程应用乃至社会生活的方方面面都起着重要的作用。伴随着计算机技术的兴起,频谱分析被广泛应用于工程实践。但 Fourier 变换要求信号满足Dirichlet 条件,即对信号进行平稳 性假设,而现实中大量存在的是非平稳信号。针对Fourier 变换的不足,短时Fourier 变换(Short Time Fourier Transform , STFT ),即通过对一个时间窗内的信号进行Fourier 变换,分 析非平稳信号。虽然STFT 具有时频分析能力,但它具有固定 的时频分辨率,且难以找到合适的窗函数。而时频分析方法中的Wigner-Ville 分布存在严重的交叉项,会造成虚假信息的出现。小波变换具有可变的时频分析能力,在图像压缩和边缘检测等领域得到成功应用。但小波基不能自动更换,而且对众多小波基的合理选取也是一个难题。小波变换本质上是一种可变窗的Fourier 变换[1]。总之,这些方法没有完全摆脱 Fourier 变换的束缚,从广义上说都是对Fourier 变换的某种修 正,而且其时频分辨能力受到Heisenberg 不确定原理的制约。 Huang 等[1]在1998年提出了经验模态分解(Empirical 经验模态分解及其雷达信号处理 摘要 为了准确估计信号的瞬时频率,可用经验模态分解(EMD )将信号分解成有限个窄带信号。该方法因具有很强的自适应性及 处理非平稳信号的能力而引起广泛关注,已在众多工程领域得到应用。但EMD 是基于经验的方法,数值仿真和试验研究仍是分析 EMD 算法的主要方法。本文总结了EMD 算法存在的问题,并指出深入挖掘支持该方法的理论基础是消除制约EMD 算法进一步发 展和应用推广的关键。针对所存在的问题,从改进筛分停止准则、抑制端点效应、改进包络生成方法和解决模态混叠问题等诸方面阐述了改进EMD 算法的研究进展。综述了EMD 在雷达信号处理领域的应用。最后分析指出了进一步研究EMD 的几个主要方向。 关键词经验模态分解(EMD );希尔伯特-黄变换(HHT );时频信号分析;雷达信号处理 中图分类号TN911.7文献标识码A 文章编号1000-7857(2010)10-0101-05 杨彦利,邓甲昊 北京理工大学机电学院;机电工程与控制重点实验室,北京100081 Empirical Mode Decomposition and Its Application to Radar Signal 收稿日期:2010-03-24 作者简介:杨彦利,博士研究生,研究方向为探测、制导与控制,电子信箱:yyl070805@https://www.360docs.net/doc/f516787975.html, ;邓甲昊(通信作者),教授,研究方向为中近程目标探测、 信号处理及感知与自适应控制,电子信箱:bitdjh@https://www.360docs.net/doc/f516787975.html, YANG Yanli,DENG Jiahao Laboratory of Mechatronic Engineering &Control,School of Mechatronical Engineering,Beijing Institute of Technology,Beijing 100081,China Abstract In order to better estimate the instantaneous frequency of signals,the empirical mode decomposition (EMD)algorithm,proposed by Huang et al.,is used to break multi-component signals into several narrow subbands.EMD is an adaptive method and can be used to analyze nonstationary signals,so it has been widely applied to many engineering fields.However,EMD is still considered as an empirical method because it lacks a rigorous mathematical foundation,and its analysis depends largely on numerical simulations and experimental investigations.In this paper,related problems of the EMD algorithm are discussed,including its theoretical foundation and its applications.Some modified EMD algorithms are considered to overcome problems,such as stopping criterion,end effect,envelope of signals and mode aliasing.The applications of EMD to the processing of radar signals are reviewed.Some directions for further research on the EMD algorithm are suggested. Keywords empirical mode decomposition (EMD);Hilbert-Huang transform (HHT);time-frequency signal processing;radar signal processing 综述文章(Reviews )
经验模态分解(EMD)在地球物理资料中的应用(附MATLAB程序)
经验模态分解(EMD)在地球物理资料中的应用(附MATLAB程序) 摘要经验模态分解(EMD)是由Huang等人提出的一种新的分析非线性、非平稳信号的方法。本文研究经验模态分解原理及其在地球物理资料中的应用。首先研究经验模态分解的基本原理和算法,对地球物理资料(地震资料,重磁资料)进行EMD分解试验分析,然后研究基于...
摘 要
经验模态分解(EMD)是由Huang等人提出的一种新的分析非线性、非平稳信号的方法。本文研究经验模态分解原理及其在地球物理资料中的应用。首先研究经验模态分解的基本原理和算法,对地球物理资料(地震资料,重磁资料)进行EMD分解试验分析,然后研究基于EMD的Hilbert变换原理及其在提取地震属性信息中的应用,对实际地震时间剖面和时间切片进行EMD时频分析试验。
本文的方法研究和数据试验分析表明:经EMD分解变换得到的IMF序列是直接从原始时序数据中分离出来的,事先无需确定分解阶次,能更好反映原始数据固有的物理特性,每阶IMF序列都代表了某种特定意义的频带信息;EMD分解获得的IMF序列具有稳态性,对IMF进行Hilbert变换,就可以得到单个固有模态函数的瞬时振幅、瞬时相位和瞬时频率,这些信息可以清楚的显示信号的时频特征;EMD分析方法用于分解地球物理资料和作时频分析是有效的。
关键词:经验模态分解;地球物理;Hilbert变换;固有模态函数;时频分析
ABSTRACT
Empirical Mode Decomposition(EMD), which was developed by huang, is a new method to analyse nonlinear and nonstationary signals. In this paper, we study the theory of EMD and its applications in handling geophysical data. Firstly, we introduce the theory and the Methodology about EMD ,then we will use this method to analyse the geophysical information, including the g ravity anomaly data and seism’s data. Based on the EMD, we will study the theory of the Hilbert transform, and then use it to obtain the images,from which we can deal with the seism’s slice by time- frequency analysis in order to distill the seism’s information.
The studying of EMD and the data testing in this paper indicate: intrinsic mode functions(IMF) is comes from the original signal by the EMD, in this course, we need not fix on the Decomposition number and would not influenced by some men’s factors. Every intrinsic mode function stand for some given information and can reflect the
经验模态分解(EEMD)、Fourier变换、HHT
10总体经验模态分解(EEMD)、Fourier变换、HHT EEMD实际就是噪声分析法和EMD方法的结合,抑制模态混叠。 Fourier变换是将任何信号分解为正弦信号的加权和,而每一个正弦信号对应着一个固定的频率(Fourier频率)和固定的幅值,因此,用Fourier 变换分析频率不随时间变化的平稳信号是十分有效的。但对于频率随时间变化的非平稳信号,Fourier 变换就无能为力了。 HHT是历史上首次对Fourier变换的基本信号和频率定义作的创造性的改进。他们不再认为组成信号的基本信号是正弦信号,而是一种称为固有模态函数的信号,也就是满足以下两个条件的信号: (1) 整个信号中,零点数与极点数相等或至多相差1 ; (2) 信号上任意一点,由局部极大值点确定的包络线和由局部极小值点确定的包络线的均值均为零,即信号关于时间轴局部对称。 无论Hilbert谱中的频率还是边际谱中的频率(即瞬时频率) ,其意义都与Fourier分析中的频率(即Fourier 频率) 完全不同,但在Fourier分析中,某一频率处能量的存在,代表一个正弦或余弦波在整个时间轴上的存在,而边际谱h中某一频率处能量的存在仅代表在整个时间轴上可能有这样一个频率的振动波在局部出现过,h越大,代表该频率出现的可能性越大。 11、HHT时频灰度谱转黑白谱 MATLAB作HHT时频谱时出来的是彩色的时频图。请问有办法在MATLAB上面将彩色谱图调成白色底黑色线的黑白图吗哎,因为老师说彩色图普通印出来的话不好看,一片黑的,谢谢大家啊 答:后面加上这个就可以了colormap(flipud(gray)) 12、HHT谱图怎么会这样呢 小弟刚刚接触HHT,也不是学信号的,只是用HHT这个工具处理信号,在处理过程中遇到了这样的问题: 对实测信号直接EMD,然后作HHT谱图如下:
经验模态分解EMD
经验模态分解EMD 经验模态分解是一种基于信号局部特征的信号分解方法。是一种自适应的信号分解方法 任何复杂的信号都是由简单的固有模态函数(intrinsic mode function,IMF)组成,且每一个IMF 都是相互独立的。该方法可以将风速数据时间序列中真实存在的不同尺度或趋势分量逐级分解出来,产生一系列具有相同特征尺度的数据序列,分解后的序列与风速原始数据序列相比具有更强的规律性。 EMD的基本思想认为任何复杂的信号都是由一些相互不同的、简单非正弦函数的分量信号组成。 EMD将非平稳序列分解为数目不多的IMF 分量c和一个趋势项r(残余函数),r是原序列经过逐级分离出IMF 分量后,最终剩下来的“分量”,是单调的和光滑的。 信号的EMD 分解本质上是通过求包络线对信号不断进行移动平均的迭代过程,包络线的不准确将导致信号分解的不完全。传统算法在求包络线时在信号端点处易产生飞翼现象, 即在端点处会产生过大或过小振幅, 若不先对信号进行端点延拓, EMD 分解将无法继续。 确定信号决定了交通流变化的总体趋势,不确定性干扰信号使实际交通流变化在趋势线附近呈现大小不一的波动。 信号从高到低不同频段的成分,具有不等带宽的特点,并且EMD 方法是根据信号本身固有特征的自适应分解。
EMD分解的目的是根据信号的局部时间特征尺度,按频率由高到低把复杂的非线性、非平稳信号分解为有限经验模态函数(IMF)之和 r(t)为残余函数,一般为信号的平均趋势。是非平稳函数的单调趋势项。 风速时间序列的EMD 分解步骤如下: 1)识别出信号中所有极大值点并拟合其包络线eup(t)。 2 )提取信号中的极小值点和拟合包络线elow(t),计算上下包络线的平均值m1(t)。 up low 1 ( ) ( ) ( ) 2 e t e t m t + = (1) 3)将x(t)减去m1(t)得到h1(t),将h1(t)视为新的信号x(t),重复第1)步,经过k 次筛选,直到h1(t)=x(t)?m1(t)满足IMF 条件,记c1(t)=h1(t),则c1(t)为风速序列的第1 个IMF 分量,它包含原始序列中最短的周期分量。从原始信号中分离出IMF 分量c1(t),得
经验模态分解算法
经验模态分解 摘要——黄提出了经验模态分解(EMD)的数据处理方法,也对这种技术应用的有效性进行了讨论。许多变种算法(新的停止准则,即时版本的算法)也产生出来。数值模拟用来作经验性的评估执行单元运用于语音识别和分离方面,得出的实验结果认为这种方法是根据自适应的常数Q的滤波器组提出的。 1.介绍 近来,一种被称为EMD的新的非线性方法被黄等人提出,这种方法能够自适应的把非平稳信号分解成一系列零均值的AMFM信号(调频调幅) 的总和。尽管这种方法经常有着显著的效果,但是这个方法在算法方面的定义是困难的,因此这种方法没有作为一种分析方法得到承认,一般一种分析方法是需要有理论分析和性能评估。因此本文的目的是用实验的方式使得该算法更容易理解,并且提出了基于原算法的各种各样的改进的算法。设置实验性能评估的许多初始条件是为了获取一种有效的分解并且使得该算法更容易理解。 2.EMD基础 EMD的出发点是把信号内的震荡看作是局部的。实际上,如果我们要看评估信号x(t)的2个相邻极值点之间的变化(2个极小值,分别在t-和t+处),我们需要定义一个(局部)高频成分{d(t),t-<=t<=t+}(局部细节),这个高频成分与震荡相对应,震荡在2个极小值之间并且通过了极大值(肯定出现在2极小值之间)。为了完整这个图形,我们还需要定义一个(局部)低频成分m(t)(局部趋势),这样x(t)=m(t)+d(t),(t-<=t<=t+)。对于整个信号的所有震动成分,如果我们能够找到合适的方法进行此类分解,这个过程可以应用于所有的局部趋势的残余成分,因此一个信号的构成成分能够通过迭代的方式被抽离出来。 对于一个给定的信号x(t),进行有效的EMD分解步骤如下: 1)找出想x(t)的所有极值点 2)用插值法对极小值点形成下包络emint(t),对极大值形成上包络emax(t) 3)计算均值m(t)=(emint(t)+emax(t))/2 4)抽离细节d(t)=x(t)-m(t) 5)对残余的m(t)重复上诉步骤 在实际中,上述过程需要通过一个筛选过程进行重定义,筛选过程的第一个迭代步骤是对细节信号d(t)重复从1-4步,直到d(t)的均值是0,或者满足某种停止准则才停止迭代。一旦满足停止准则,此时的细节信号d(t)就被称为IMF,d(t)对应残量信号用第5步计算。通过以上过程,极值点的数量伴随着残量信号的产生而越来越少,整个分解过程会产生有限个模函数(IMF)。 模函数和残量信号可以进行谱分析,但是这个谱分析不能从狭隘的角度来看。首先,需要强调一下,即使是谐振荡,应用上述方法产生的高频和低频也只是局部的,没办法产生一个预设的频带过滤(例如小波变换)进行辨识。选择的模函数对应了一个自适应(依赖于信号自身的)的时变滤波器。一个这方面的例子:一个信号由3个部分组成(这3个部分是时间频率上都明显叠加的信号),用上述方法成功的分解了。分解如图1所示。这个例子的程序是emd_fmsin2.m 另外一个例子(emd_sawtooth.m)强调了EMD潜在的非谐振性质如图2所示。在这些例子中,线性的非线性的震荡都能被有效的识别和分离。因而,任何谐振分析(傅里叶,小波,…)可能结束在同类文章中,更少的紧凑和更少的实际意义的分解。 3.算法的改进 正如第二部分所定义的,EMD算法依赖于一系列的选项,这些选项需要用户控制,并且需要专业的知识。在此我们的目的找出更准确的选项,并且给予原来的算法进行改进。3.1采样率,插值方法和边缘效应
经验模态分解算法中端点问题的处理(1)
x=[0 30 60 90 120 150 180 210 240 270 300 330 360]; y=[-0.0167 -1.0927 -1.8725 -2.3586 -2.3061 -1.9576 -0.9574 -0.0080 0.8896 1.3877 1.1139 0.8517 -0.0167]; fun=@(a,t) a(1)+a(2)*sind(t+a(3)) %matlab7.0以上版本,否则用inline %fun=inline('a(1)+a(2)*sind(t+a(3))','a','t') a0=[-0.5 -1.9 -0.079]; a=nlinfit(x,y,fun,a0) t=0:5:360; yf=fun(a,t); plot(x,y,'o',t,yf) 结果: fun = @(a,t) a(1)+a(2)*sind(t+a(3)) a = -0.5239 -1.8995 -14.2382
经验模态分解算法中端点问题的处理 摘要:经验模态分解(EMD)方法就是对非线性、非平稳信号运用时间区域序列的上下包络线的均值得到瞬时平衡位置,将被分析信号分解成一组相互独立的稳态和线性的固有模态函数(IMF)数集。经验模态分解(EMD)方法是基于原始信号本事出发,经过筛选先把频率高的IMF 分量分离出来,然后在分离频率较低的IMF分量。其实质就是利用时间特征尺度来获取原始信号数据中的振荡模态,本文对经验模态分解算法中端点问题的处理进行研究。 关键词:经验模态分解算法端点函数 经验模态分解(EMD)方法被提出后在各个领域普遍的应用,其具有直观、简单、自适应、完备性和正交性以及调制特性等一系列良好的特点。 (1)自适应性 经验模态分解(EMD)方法的自适应性表现为自适应生成基函数。在整个筛选分解过程中
经验模态分解
经验模态分解(Empirical Mode Decomposition,简称EMD) 对数据信号进行EMD分解就是为了获得本征模函数,因此,在介绍EMD分析方法的 具体过程之前,有必要先介绍EMD分解过程中所涉及的基本概念的定义:本征模函数,这是掌握EMD方法的基础。 本征模函数 在物理上,如果瞬时频率有意义,那么函数必须是对称的,局部均值为零,并且具有 相同的过零点和极值点数目。在此基础上,NordneE.Hunag等人提出了本征模函数(Intrinsic Mode Function,简称IMF)的概念。本征模函数任意一点的瞬时频率都是 有意义的。Hunag等人认为任何信号都是由若干本征模函数组成,任何时候,一个信 号都可以包含若干个本征模函数,如果本征模函数之间相互重叠,便形成复合信号。EMD分解的目的就是为了获取本征模函数,然后再对各本征模函数进行希尔伯特变换,得到希尔伯特谱。 Hunag认为,一个本征模函数必须满足以下两个条件: ⑴l函数在整个时间范围内,局部极值点和过零点的数目必须相等,或最多相差一个; ⑵在任意时刻点,局部最大值的包络(上包络线)和局部最小值的包络(下包络线) 平均必须为零。 第一个条件是很明显的,它与传统的平稳高斯信号的窄带要求类似。对于第二个条件,是一个新的概念,它把经典的全局性要求修改为局部性要求,使瞬时频率不再受不对 称波形所形成的不必要的波动所影响。实际上,这个条件应为“数据的局部均值是零”。但是对于非平稳数据来说,计算局部均值涉及到“局部时间尺度”的概念,而 这是很难定义的。因此,在第二个条件中使用了局部极大值包络和局部极小值包络的 平均为零来代替,使信号的波形局部对称。Huang等人研究表明,在一般情况下,使 用这种代替,瞬时频率还是符合所研究系统的物理意义。本征模函数表征了数据的内 在的振动模式。由本征模函数的定义可知,由过零点所定义的本征模函数的每一个振 动周期,只有一个振动模式,没有其他复杂的骑波;一个本征模函数没有约束为是一 个窄带信号,并且可以是频率和幅值的调制,还可以是非稳态的;单由频率或单由幅 值调制的信号也可成为本征模函数。 EMD方法的分解过程 由于大多数所有要分析的数据都不是本征模函数,在任意时间点上,数据可能包含多 个波动模式,这就是简单的希尔伯特变换不能完全表征一般数据的频率特性的原因。 于是需要对原数据进行EMD分解来获得本征模函数。
EMD经验模态分解
EMD ?①分解得到的IMF分量是基于序列(信号)本身的局部的特征时间尺度,各个分量表征了原序列不同时间尺度(或频率)的振荡变化,趋势项集中反映了序列的非平稳性,在一定程度上表现原序列的总趋势; ?②瞬时频率ω(t)作为时间的函数,能敏锐地识别出资料的多尺度嵌套结构。 ?③Hilbert谱是由每个IMF分量经过Hilbert变换得到的,因而具有明确的物理意义,反映了物理过程的能量(振幅)‐频率‐时间的分布。
?EMD分解方法是基于以下假设条件: ?⑴数据至少有两个极值,一个最大值和一个最小值; ?⑵数据的局部时域特性是由极值点间的时间尺度唯一确定; ?⑶如果数据没有极值点但有拐点,则可以通过对数据微分一次或多次求得极值,然后再通过积分来获得分解结果。 它能用几个内在的本征模态和一个剩余来揭示序列的振荡结构特征和非平稳性;用谱图准确地给出原序列及其IMF分量的主要振幅变化所对应的频率和时间;在处理强间歇性信号以及短数据序列方面有很好的效果。 瞬时频率 ?它的频率是随时间改变的,即叫ωj(t) ?对于任一时间连续函数X(t),其Hilbert变换Y(t)定义为: 上式表示X(t)与1/t的卷积,Hilbert变换强调X(t)的局部性。定义式上可以看出Hilbert变换是从时域到时域的变换。 ?构造解析信号Z(t)
?用幅角的时间导数来定义瞬时频率: 瞬时频率是ω=ω(t)是时间的单值函数。 ?瞬时频率把信号限定为“窄带”,即极大点(极小点)的数目与穿 零点的数目相等。 为了使瞬时频率具有物理意义,必须加上约束条件,下面举正弦波的例子来说明这个约束条件的含义。正弦函数写成: X(t)=sin t 它的Hilbert变换是cos t,在x-y平面的相点图1.1(a)中的单位圆,相函数是1.1(b)中的直线,瞬时频率是1.1(c)所示,是一个常数。
LMD经验模态分解matlab程序
LMD经验模态分解matlab程序——原味的 曾经也用滑动平均写过LMD,其实滑动平均的EMD才是原汁原味的居于均值分解。 分享给有需要的人,程序写的不好,只是希望提供一种思路。如果谁写了更完美LMD程序,别忘了发我一份,快毕业了,一直没有把LMD写完美,对于我来说始终是个遗憾。来分完美的LMD让我也品尝下,我也无憾了~ 代码下载地址:https://www.360docs.net/doc/f516787975.html,/source/3102096 此处没有提供测试代码,如需要可以点这里:点我 源代码如下: %原始lmd算法,效果很不好,不知道程序哪里写错 function[PF,A,SI]=lmd(m) c=m; k=0 wucha1=0.001; n_l=nengliang(m); while 1 k=k+1; a=1; h=c; [pf,a,si]=zhaochun(a,h,wucha1); c=c-pf; PF(k,:)=pf; A(k,:)=a; SI(k,:)=si; c_pos=pos(c); n_c=nengliang(c); n_pf=nengliang(pf); if length(c_pos)<3 || n_c