控制工程基础5-第2章 (控制系统的框图和其化简练习题)
《控制工程基础》试卷及详细答案

一、填空题(每题1分,共15分)1、对于自动控制系统的性能要求可以概括为三个方面,即: 、 和 ,其中最基本的要求是 。
2、若某单位负反馈控制系统的前向传递函数为()G s ,则该系统的开环传递函数为 。
3、能表达控制系统各变量之间关系的数学表达式或表示方法,叫系统的数学模型,在古典控制理论中系统数学模型有 、 等。
4、判断一个闭环线性控制系统是否稳定,可采用、、 等方法。
5、自动控制系统有两种基本控制方式,当控制装置与受控对象之间只有顺向作用而无反向联系时,称为 ;当控制装置与受控对象之间不但有顺向作用而且还有反向联系时,称为 。
6、设系统的开环传递函数为12(1)(1)Ks T s T s ++,则其开环幅频特性为 ,相频特性为 。
7、最小相位系统是指。
二、选择题(每题2分,共20分) 1、关于奈氏判据及其辅助函数 F(s)= 1+ G(s)H(s),错误的说法是 ( ) A 、 F(s)的零点就是开环传递函数的极点B 、 F(s)的极点就是开环传递函数的极点C 、 F(s)的零点数与极点数相同D 、 F(s)的零点就是闭环传递函数的极点2、已知负反馈系统的开环传递函数为221()6100s G s s s +=++,则该系统的闭环特征方程为 ( )。
A 、261000s s ++= B 、2(6100)(21)0s s s ++++=C 、2610010s s +++=D 、与是否为单位反馈系统有关3、一阶系统的闭环极点越靠近S 平面原点,则 ( ) 。
A 、准确度越高B 、准确度越低C 、响应速度越快D 、响应速度越慢4、已知系统的开环传递函数为100(0.11)(5)s s ++,则该系统的开环增益为( )。
A 、 100B 、1000C 、20D 、不能确定5、若两个系统的根轨迹相同,则有相同的:A 、闭环零点和极点B 、开环零点C 、闭环极点D 、阶跃响应6、下列串联校正装置的传递函数中,能在1c ω=处提供最大相位超前角的是( )。
控制工程基础ppt教案第二章2
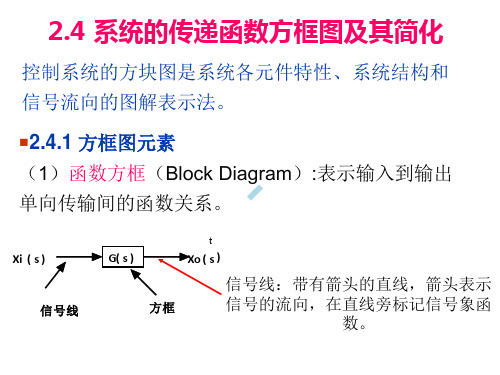
信号的流向,在直线旁标记信号象函
数。
(2)相加点(比较点、综合点)Summing Point 两个或两个以上的输入信号进行加减比较的元件。 “+”表示相加,“-”表示相减。“+”号可省略不写。
Υ1 +
Υ1+Υ2
+
Υ2
Υ3
Υ1
Υ1-Υ2+Υ3
-
Υ2
注意:进行相加减的量,必须具有相同的量纲。
(3)分支点(引出点、测量点)Branch Point 表示同一信号向不同方向传递
例2-8 画出下列RC电路的方块图。 解:
u
i
iR
uo idt
u o c
对其进行拉氏变换得:
R
ui
iC
uo
(a)
U Uio((ss))IIs((sC s))RUo(s)
(1) (2)
UI(os()s) UIis((sCs))RUo(s)
(1) (2)
UI(os()s) UIis((sCs))RUo(s)
xi ( s )
E(s)
G(s)
+ - ))G(s)H(s)
xo (s)
(4)闭环传递函数 :输出信号Xo(s)与输入信号Xi(s)之比。
GB(s)X Xo i((ss))1H G ((ss))G(s)
推导
Xis Es Gs +- Bs Hs
Xis s
2、并联连接
R(s)
G1(s) G2 (s)
C2 (s)
C1(s)
C(s)
G3(s) (a)
C3(s)
R(s)
C(s)
G(s)
(b)
图2-24 环节的并联连接
控制工程基础第二章参考答案
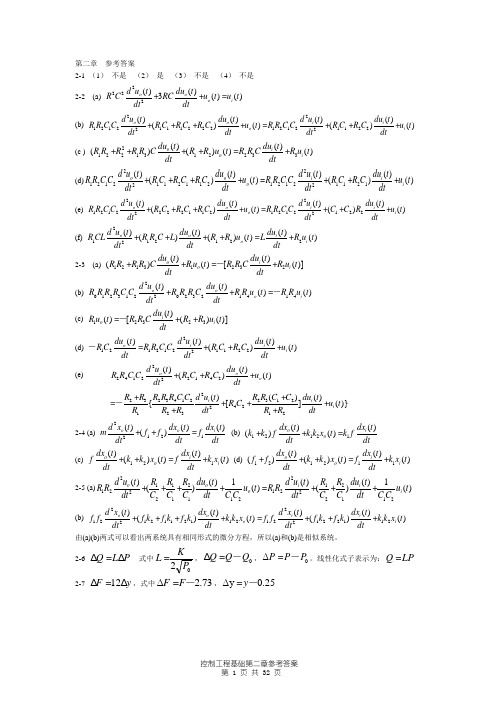
第二章 参考答案2-1 (1) 不是 (2) 是 (3) 不是 (4) 不是 2-2 (a))()()(3)(2222t u t u dtt du RC dt t u d C R i o o o =++ (b) )()()()()()()()(2211222121222111222121t u dtt du C R C R dt t u d C C R R t u dt t du C R C R C R dt t u d C C R R i i i o o o +++=++++ (c ) )()()()()()(33221312221t u R dtt du C R R t u R R dt t du C R R R R R i i o o +=++++(d))()()()()()()()(1211222121211211222121t u dtt du C R C R dt t u d C C R R t u dt t du C R C R C R dt t u d C C R R i i i o o o +++=++++ (e))()()()()()()()(221222121211222222121t u dtt du R C C dt t u d C C R R t u dt t du C R C R C R dt t u d C C R R i i i o o o +++=++++ (f) )()()()()()()(22121221t u R dtt du L t u R R dt t du L C R R dt t u d CL R i i oo o +=++++ 2-3 (a) )]()([)()()(23213121t u R dtt du C R R t u R dt t du C R R R R i i o o +=++-(b) )()()()(4141232022213210t u R R t u R R dt t du C R R R dt t u d C C R R R R i o o o -=++ (c))]()()([)(32321t u R R dtt du C R R t u R i i o ++=-(d) )()()()()(221122212121t u dt t du C R C R dt t u d C C R R dt t du C R i i i o +++=- (e) )()()()(2412222142t u dtt du C R C R dt t u d C C R R o o o +++ )}()(])([)({21213224223221432132t u dtt du R R C C R R C R dt t u d R R C C R R R R R R i i i +++++++=- 2-4 (a) dt t dx f dt t dx f f dt t x d m i o o )()()()(12122=++ (b) dt t dx f k t x k k dt t dx f k k i o o )()()()(12121=++ (c) )()()()()(121t x k dt t dx f t x k k dt t dx f i i o o +=++ (d) )()()()()()(112121t x k dtt dx f t x k k dt t dx f f i i o o +=+++2-5 (a))(1)()()()(1)()()(2112212221211*********t u C C dt t du C R C R dt t u d R R t u C C dt t du C R C R C R dt t u d R R i i i o o o +++=++++ (b))()()()()()()()(2112212221211211212221t x k k dtt dx k f k f dt t x d f f t x k k dt t dx k f k f k f dt t x d f f i i i o o o +++=++++ 由(a)(b)两式可以看出两系统具有相同形式的微分方程,所以(a)和(b)是相似系统。
控制工程基础第二章02
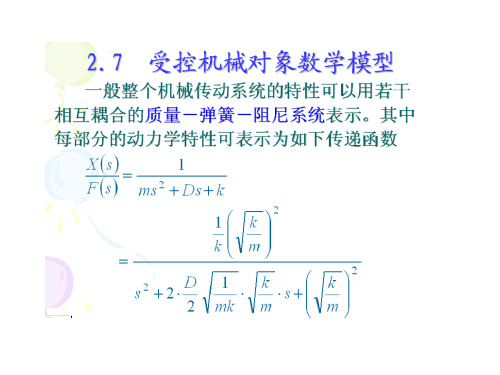
2.8
绘制实际物理系统的函数方块图
(t 例 2-22 绘制如图所示系统方块图。其中 θι ) 为输入转角; k1 , k 2 θ0() t 为输出转角; 为扭簧刚度; 为转动惯量; J1, J 2 T1 (t),T2 (t) 为转矩;D为粘性阻尼系数。
T1 (t ) = k1 [θ1 (t ) − θ A (t )] .. 设 J1 的转角为 θ(t) ,如图所示。 A T1 (t ) − T2 (t ) = J1 θ A (t ) 列方程组 T2 (t ) = k 2..[θ A (t ) − θ 0 (t )] . T (t ) = J θ 0 (t ) + Ds θ 0 (t ) 2 2
用MATLAB求系统传递函数 1 1 已知两个系统 G1 (s ) = , G2 (s ) = s s+2 分别求两者串联、并联连接时的系统传递函数, 并求负反馈连接时系统的零、极点增益模型。
num1=[1]; den1=[1,0]; num2=[1]; den2=[1,2]; [numc,denc]=series(num1,den1,num2,den2); [numb,denb]=parallel(num1,den1,num2,den2); [numf,denf]=feedback(num1,den1,num2,den2,-1); [z,p,k]=tf2zp(numf,denf)
例2-23 绘制如图2-36所示系统的方块图。 设中间点A,如图2-36所示
图 2-36 无源滤波网络
各环节方块图如图2-37所示。
图2-37 系统各环节方块图
将各环节方块图结合成一体,得系统方块图如图2-38所示。
图2-38 系统方块图
这里还需要指出,环节方块图的串联与具体电路环节的 串联有时是不对应的。例如图2-36所示的电路是图2-39 所示电路环节串联而成的,但图2-39电路环节的方块图 串联起来(如图2-40所示)与图2-36电路的方块图(如 图2-38所示)并不相同。这是由于环节负载效应的缘故, 如果负载效应可以忽略,例如在电路环节之间加上放大 倍数为1的隔离放大器,则具体电路环节的串联与相应 方块图的串联就可以对应起来。对于由运算放大器组成 的有源电路由于输入阻抗高,通常可认为与前面的电路 之间存在隔离放大器。
《控制工程基础》课程作业习题(含解答)
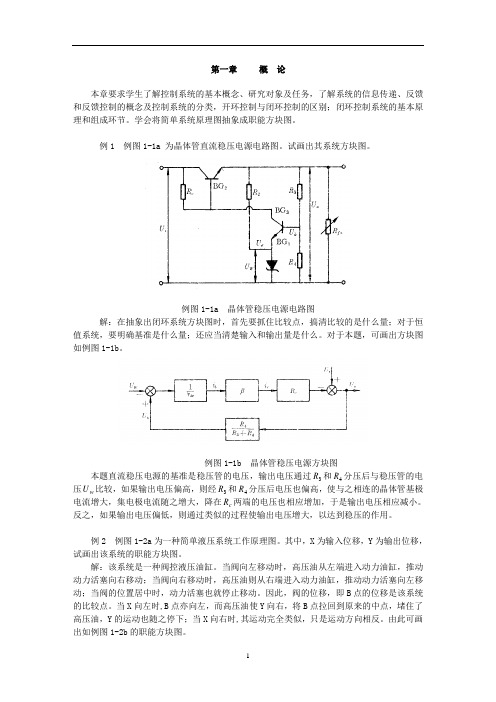
第一章概论本章要求学生了解控制系统的基本概念、研究对象及任务,了解系统的信息传递、反馈和反馈控制的概念及控制系统的分类,开环控制与闭环控制的区别;闭环控制系统的基本原理和组成环节。
学会将简单系统原理图抽象成职能方块图。
例1 例图1-1a 为晶体管直流稳压电源电路图。
试画出其系统方块图。
例图1-1a 晶体管稳压电源电路图解:在抽象出闭环系统方块图时,首先要抓住比较点,搞清比较的是什么量;对于恒值系统,要明确基准是什么量;还应当清楚输入和输出量是什么。
对于本题,可画出方块图如例图1-1b。
例图1-1b 晶体管稳压电源方块图本题直流稳压电源的基准是稳压管的电压,输出电压通过R和4R分压后与稳压管的电3压U比较,如果输出电压偏高,则经3R和4R分压后电压也偏高,使与之相连的晶体管基极w电流增大,集电极电流随之增大,降在R两端的电压也相应增加,于是输出电压相应减小。
c反之,如果输出电压偏低,则通过类似的过程使输出电压增大,以达到稳压的作用。
例2 例图1-2a为一种简单液压系统工作原理图。
其中,X为输入位移,Y为输出位移,试画出该系统的职能方块图。
解:该系统是一种阀控液压油缸。
当阀向左移动时,高压油从左端进入动力油缸,推动动力活塞向右移动;当阀向右移动时,高压油则从右端进入动力油缸,推动动力活塞向左移动;当阀的位置居中时,动力活塞也就停止移动。
因此,阀的位移,即B点的位移是该系统的比较点。
当X向左时,B点亦向左,而高压油使Y向右,将B点拉回到原来的中点,堵住了高压油,Y的运动也随之停下;当X向右时,其运动完全类似,只是运动方向相反。
由此可画出如例图1-2b的职能方块图。
例图1-2a 简单液压系统例图1-2b 职能方块图1.在给出的几种答案里,选择出正确的答案。
(1)以同等精度元件组成的开环系统和闭环系统,其精度比较为_______ (A )开环高; (B )闭环高; (C )相差不多; (D )一样高。
(2)系统的输出信号对控制作用的影响 (A )开环有; (B )闭环有; (C )都没有; (D )都有。
第2章控制系统的结构图及化简-2013

Uc(s) = I2(s) sc 2
1
图1图2比较
Ur(s)
从右 到左
R1 1
1 I (s)
SC1
I2(s)
R2
I1(s) I1(s)
sc2
1
Uc(s)
sc1
(补充)
Ur(s)
从左 到右
Sc 1
sc1
R2 I2(s)
1
Uc(s)
sc2
I2(s)
R1
I(s)
绘制网络结构图(3)
R1
U1(s)
R2
I2(s)
第2章 控制系统的数学模型
2.3 控制系统的结构图及其等效变换
2013.3.26
r (s) k U r (s)
r
W1
W2
位置随动系统结构图绘制
U r (s ) U c (s ) U (s )
U (s) Ut (s) U(s) r 1 m (s) c (s) E i uε r ur uε
1 [I1 (s) I 2 (s)] U 1 (s ) sc1 1 I 2 (s) Uc (s) sc2
练习题1
描述系统动态性能的方程组如下,试绘制以R(s)为输入 信号、C(s)为输出信号、N(s)为干扰信号的系统结构图。
E(s)=R(s)-C(s) N(s)+X4(s)=C(s) X4(s)=X3(s)G2(s)
r ( t ) k r ( t )
绘制网络结构图(1)
I(s)
R1 R2 1 C 1 I1(s)
urr(t) U (s) Ur(s)
sc1
R1
sc2
I2(s) R2
机械控制工程基础第二章的答案及解析
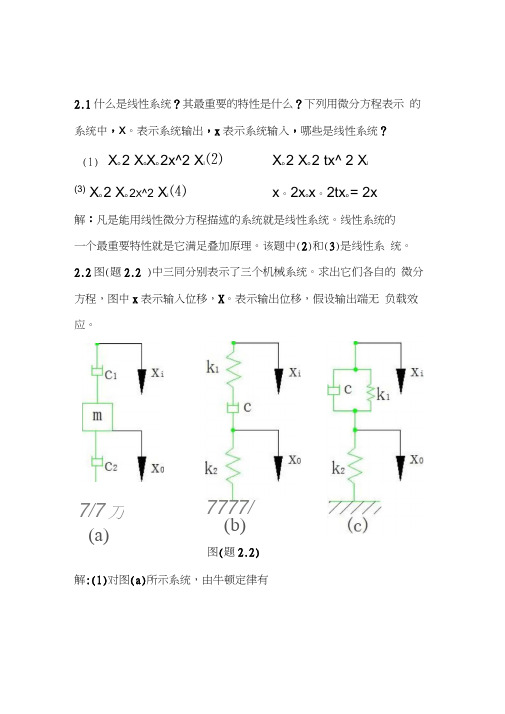
2.1什么是线性系统?其最重要的特性是什么?下列用微分方程表示 的系统中,x 。
表示系统输出,x 表示系统输入,哪些是线性系统? (1)X o2 X oX o2x^2 X i⑵X o2 X o 2 tx^ 2 Xi(3)X o2 X o2X ^2 X i⑷x 。
2x ox 。
2tx o= 2x解:凡是能用线性微分方程描述的系统就是线性系统。
线性系统的 一个最重要特性就是它满足叠加原理。
该题中(2)和(3)是线性系 统。
2.2图(题2.2 )中三同分别表示了三个机械系统。
求出它们各自的 微分方程,图中x 表示输入位移,X 。
表示输出位移,假设输出端无 负载效应。
图(题2.2)解:(1)对图(a)所示系统,由牛顿定律有7/7刀 (a)7777/ (b)c i( x —x 。
) —C 2X 。
二 mx 。
mx 。
( c iC 2)x 。
二 c iXi(X j-x)k i= c(x-x 。
)c(xx °) = k 2x 。
(1) (2)消除中间变量有c (总- k 2)x 。
- k ik zx 。
二 ckix(3) 对图(c)所示系统,由牛顿定律有c ( X - x 。
) k i( X - x 。
)= k zx 。
1c x°+ ( ki+ k 2)x °=cx+ kix2.3 求出图(题2.3)所示电系统的微分方程。
(a)图(题2.3)解:(1)对图⑻ 所示系统,设j 1为流过R 的电流,j 为总电流,则有1 u 厂 R ?iidtC2□ 一 u 。
二 R i j i对图(b)所示系统,引入一中间变量 x,并由牛顿定律有RiCiUiUnR解:设系统输入为M (即),输出二(即),分别对圆盘和质块进行动 力学分析,列写动力学方程如下:1U i-U 。
(i-i i)dtC1消除中间变量,并化简有C 1R 2U(1RC ) U 。
-= 0^+(肯+ C2)⑵ 对图(b )所示系统,设i 为电流,则有1CR 2U 。
机械控制工程基础第二章的答案及解析
2.1什么是线性系统?其最重要的特性是什么?下列用微分方程表示 的系统中,x 。
表示系统输出,x 表示系统输入,哪些是线性系统? (1)X o2 X oX o2x^2 X i⑵X o2 X o 2 tx^ 2 Xi(3)X o2 X o2X ^2 X i⑷x 。
2x ox 。
2tx o= 2x解:凡是能用线性微分方程描述的系统就是线性系统。
线性系统的 一个最重要特性就是它满足叠加原理。
该题中(2)和(3)是线性系 统。
2.2图(题2.2 )中三同分别表示了三个机械系统。
求出它们各自的 微分方程,图中x 表示输入位移,X 。
表示输出位移,假设输出端无 负载效应。
图(题2.2)解:(1)对图(a)所示系统,由牛顿定律有7/7刀 (a)7777/ (b)c i( x —x 。
) —C 2X 。
二 mx 。
mx 。
( c iC 2)x 。
二 c iXi(X j-x)k i= c(x-x 。
)c(xx °) = k 2x 。
(1) (2)消除中间变量有c (总- k 2)x 。
- k ik zx 。
二 ckix(3) 对图(c)所示系统,由牛顿定律有c ( X - x 。
) k i( X - x 。
)= k zx 。
1c x°+ ( ki+ k 2)x °=cx+ kix2.3 求出图(题2.3)所示电系统的微分方程。
(a)图(题2.3)解:(1)对图⑻ 所示系统,设j 1为流过R 的电流,j 为总电流,则有1 u 厂 R ?iidtC2□ 一 u 。
二 R i j i对图(b)所示系统,引入一中间变量 x,并由牛顿定律有RiCiUiUnR解:设系统输入为M (即),输出二(即),分别对圆盘和质块进行动 力学分析,列写动力学方程如下:1U i-U 。
(i-i i)dtC1消除中间变量,并化简有C 1R 2U(1RC ) U 。
-= 0^+(肯+ C2)⑵ 对图(b )所示系统,设i 为电流,则有1CR 2U 。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
U a ( s) Ra I a ( s) La sI a ( s)
M m (s) Cm I a (s)
Eb (s) Kb sm (s)
Js2 m (s) M m fsm (s)
1 c (s) m (s) i
m ( s)
M m (s) Cm I a (s)
Eb (s) Kb sm (s)
Js2 m (s) M m fsm (s)
1 c (s) m (s) i
系统各元部件的动态结构图(1)
r ( s)
e ( s)
e ( s) r ( s) c ( s)
U s (s) Kse (s) Ua (s) KaU s (s)
e ( s)
c ( s)
Ks
Us (s)
Ka
U a ( s)
1 La s Ra
I a ( s)
Cm
M m (s)
m (s) 1 Js2 f s
Eb (s)
系统各元部件的动态结构图(7)
e ( s) r ( s) c ( s)
b
s) (s) Eb ( s ) m( U s (s) K s e K s
1 G4 s G3 s H3 s G4 s C s
G1 s
G2 s
H1 s
–得到图为
H2(s)/G4(s) H 3 s G4 s
R s
G1 s
G2 s H1 s
G34 s
C s
3
H 32 s G44 s
C(s)
H1
第四节 框图及其化简
R(s)
-
G1G2G3G4 1 G2G3H 2 G3G4 H 3
C(s)
H1
等效变换后系统的结构图:
R(s)
G1G2G3G4 1 G1G2G3G4 H1 G2G3H 2 G3G4 H 3
C(s)
G1G2G3G4 GB ( s) 1 G1G2G3G4 H1 G2G3 H 2 G3G4 H 3
e ( s)
c ( s)
Ks
Us (s)
Ka
1 La s Ra
I a ( s)
Eb (s)
系统各元部件的动态结构图(5)
m e ( s) r ( s) ( s ) C c
I a ( s)
M (s)
m
M m (s) Cm I a (s)
U s (s) Kse (s)
U a ( s) Ra I a ( s) La sI a (s) Eb ( s)
r ( s)
e ( s)
Eb (s) Kb sm (s)
Js2 m (s) M m fsm (s)
1 c (s) m (s) i
M m (s) Cm I a (s) c ( s)
1 c (s) m (s) i
U a ( s)
e ( s)
c ( s)
Ks
Us (s)
Ka
U s ( s)
Ka
U a ( s)
系统各元部件的动态结构图(4)
e ( s) r ( s) c ( s)
U s (s) Kse (s)
Ua (s) KaU s (s)
Ua (s) KaU s (s)
U a ( s) Ra I a ( s) La sI a ( s) Eb ( s)
r ( s)
Eb (s) Kb sm (s)
Js2 m (s) M m fsm (s)
1 c (s) m (s) i
1 La s Ra
C s
12
H1 s Leabharlann s G1 s G2 s 1 G1 s 1 G2 s
C s
–将两个比较点合并,并将求出 1/ G1( s),1/ G2 ( s), H1( s)的等效传 递函数: 1 1 H1 s G1 s G2 s
eE ( s )(s) K U s ( s) s (s)
b
Ks
b
m
Js2 m (s) M m fsm (s)
1 c (s) m (s) i
e ( s)
c ( s)
Ks
Us (s)
系统各元部件的动态结构图(3)
e ( s) r ( s) c ( s)
M m (s) Cm I a (s)
Eb (s) Kb sm (s)
Js2 m (s) M m fsm (s)
1 c (s) m (s) i
U a (s) KaU s (s)
U a ( s) Ra I a ( s) La sI a ( s) Eb ( s)
ML
r
-
Ks
Ka -
1 Ra
Cm Kbs
1 Js 2 fs
1 i
c
例题分析
由动态结构图可以看出该系统有两个输入r,ML( 干扰)。 我们知道:传递函数只表示一个特定的输出、输入关 系,因此,在求c对r的关系时,根据线性叠加原 理,可取力矩 ML=0,即认为ML不存在。
要点:
结构变换的规律是:由内向外逐步进行。
e ( s)
c ( s)
Ks
Us (s)
Ka
U a ( s)
I a ( s)
Cm
Mm(s)
Eb (s)
系统各元部件的动态结构图(6)
e ( s) r ( s) c ( s)
U s (s) Kse (s)
Ua (s) KaU s (s1 ) 1
Mm ( s)
f Js Js2 fs s
i E1 b ( s)
Ks
c ( s)
Ka
r ( s)
e ( s)
c ( s)
Us (s)
U a ( s)
1 La s Ra
I a ( s)
Cm
M m (s)
c ( s) m (s) 1 1i Js2 f s
Eb (s)
Kb s
例:利用结构图变换法,求位置随动系 统的传递函数Qc(s)/Qr(s) 。
例 化简系统的结构图,求传递函数。
H3 s H (s) 2
R s
G1 s
G2 s
G3 s H3 s
G4 s
C s
H1 s
–首先将 G3 s , G4 s 间的引出点后移到方框的输出端
H 3(s) s H 2 G1 s G2 s 1 G4 s G3 s H3 s H1 s G4 s C s
r ( s)
e ( s)
c ( s)
Ks
Us (s)
Ka
U a ( s)
1 La s Ra
I a ( s)
Cm
M m (s)
m (s) 1 Js2 f s
Eb (s)
Kb s
系统各元部件的动态结构图(8)
e ( s) r ( s) c ( s)
U s (s) Kse (s)
–得到图为
G1 s 1
G1 s G2 s C s
G2 s
1
H1 s
–得到系统等效传递函数:
C s G1 s G2 s GA s R s 1 G1 s G2 s G1 s G2 s H1 s
G23 s G2 s G3 s G4 s 1 G3 s G4 s H3 s +G2 s G3 s H 2 s
4
R s
G1 s H1 s
G23 s
C s
G2 s G3 s G4 s 其中: G23 s 1 G s G s H s +G s G s H s 3 4 3 2 3 2
最后将求得其传递函数为:
GA ( s ) = G1 ( s ) G 2 ( s ) G3 ( s ) G 4 ( s )
1 +G 2 ( s ) G3 ( s ) H 2 ( s ) +G 3 ( s ) G 4 ( s ) H 3 ( s ) +G1 ( s ) G 2 ( s ) G 3 ( s ) G 4 ( s ) H 1 ( s )
G34 s
C s
–接着将 G3 s , G4 s , H3 s 组成的内反馈网络简化,其等效传 递函数为
G3 s G4 s G34 s 1 G3 s G4 s H3 s
2
H2 H s 3 (s)
R s
练习:试化简下述系统结构图,并求传递函数C(s)/R(s)
H1 s R s G1 s G2 s
C s
• 显然化简该结构图也 需要移动比较点和引 出点,需要注意得是 ,引出点和比较点之 间是不宜随便移动的 。因此我们将比较点 前移,将引出点后移 。 –得到图为
H1 s R s G1 s G2 s 1 G1 s 1 G2 s
例 化简系统的结构图,求传递函数。
H3
R(s) + G1 + G2 + H2 H1 C(s)
G3
G4
R(s)
-
G1
G2
G2 H1 G3
H3 G4
C(s)
H2