基于ADAMS的硅片传输机器人轨迹规划及仿真
基于Adams的Delta机器人路径规划设计与仿真

50 •电子技术与软件工程 Electronic Technology & Software Engineering【关键词】Delta 机器人 正弦修正梯形曲线 路径规划 Adams 仿真1 引言Delta 机器人以其重量轻、体积小、运动速度快、定位精确、成本低、效率高等特点,正在市场上被广泛应用于食品、药品和电子产品的加工装配。
由于Delta 机器人末端件惯性小、逆运动学简单、工作空间大等一系列优点,已成为机器人研究者的主要研究热点之一。
Delta 机器人在工作中需要频繁进行升降抓放的操作,因此Delta 机器人的轨迹规划十分重要,优化机器人的运动路径,能有效减少机器人在运行过程中的刚性冲击,降低故障风险,延长工作寿命,提高工作效率。
国内外许多学者对最优时间轨迹规划进行了深入研究。
赵杰等人巧妙地将Delta 机构正运动学问题最终等效为求解三棱锥定点坐标问题,直接获得了满足运动连续性的合理解;宫赤坤等人基于运动学分析了Delta 机器人的雅可比矩阵最小奇异值与条件数,对Delta 机器人结构进行了优化设计;李云辉优化了Delta 机器人抓放轨迹,使运行周期内跃度曲线变得连续,消除了系统的柔性冲击;梁香宁等人在Delta 机器人正逆运动学的基础上分析了其工作空间,陈统书等人则在MATLAB 里进行了仿真分析,并将工作空间以空间三维图形的形式直观地表示出来;王林军等人基于Matlab 和Adams 将门字形轨迹进行了仿真模拟,虽然得到了相对连续的运动数据,但是路径约束点处的导数不连续,因此主动臂在对应的这两个时刻受到冲击和振动。
本文在Solidworks 中建立模型,结合Matlab 和Adams 联合仿真,针对典型的圆角门形轨迹,以降低工作时的在转角路径点的冲基于Adams 的Delta 机器人路径规划设计与仿真文/胡睿 李宏胜击和振动,通过Matlab 工具完成计算和生成数据,并导入Adams 软件进行仿真和分析。
基于ADAMS搬运机械手轨迹规划

doi:10.16576/ki.1007-4414.2017.04.039基于ADAMS搬运机械手轨迹规划∗赵海芳,陈㊀莹,刘㊀祎(宿迁学院,江苏宿迁㊀223800)摘㊀要:通过Solid Works建立搬运机械手模型,导入ADAMS软件㊂根据末端的工作路径要求,通过点驱动的方式计算各关节角随时间的变化曲线㊂通过ADAMS的后处理模块将曲线转换为样条曲线,在各关节上添加驱动,观察求解的准确性,为物理样机调试提供依据㊂关键词:机械手;点驱动;轨迹规划;ADAMS中图分类号:TP241㊀㊀㊀㊀㊀㊀文献标志码:A㊀㊀㊀㊀㊀㊀文章编号:1007-4414(2017)04-0123-02Trajectory Planning of Handling Robbot Based on ADAMSZHAO Hai-fang,CHEN㊀Ying,LIU㊀Wei(Suqian College,Suqian Jiangsu㊀223800,China)Abstract:In this paper,the handling robot model is established by the Solid Works,and then it is imported to the ADAMS software.According to the requirements of the end working path,the curve of the joint angle changing over time is calculated through the point-driven method.Through the post processed module of ADAMS,the curve is converted into spline.Adding the motor to joints and observing the accuracy,it could provide the basis for physical prototype debugging.Key words:handling robbot;point-driven;trajectory planning;ADAMS0㊀引㊀言机械手为了完成一定的任务,必须要确定末端执行器的位姿变化,位姿的变化要通过机械臂关节角度的变化来求解,这种通过执行器末端的位姿变化求解机械臂的关节角度的变化,称之为机械手的逆解㊂传统的机械手逆解主要是通过建立D-H坐标系,编写程序进行数值计算完成,通过相应的其次变换矩阵,求解机械臂的关节角度㊂传统方法计算量大,在实时控制中较难实现,另外在机器人离线编程和轨迹规划中,此方法容易得出多组解㊂通过ADAMS软件对机械手按照指定的轨迹进行逆运动学的求解,这种方法没有繁琐的计算过程,大大提高工作效率㊂1㊀ADAMS运动学求解原理利用ADAMS建立机械系统仿真模型时,系统中构件与地面或构件与构件之间存在运动副的链接,这些运动副可以用系统广义坐标表示为代数方程,这里仅考虑完整约束[1]㊂设表示运动副的约束方程数位n,则用系统广义坐标矢量表示的运动学约束方程组为:φk(q)=[φk1(q),φk2(q),...,φk nh(q)]T=0(1)考虑运动学分析,为使系统具有确定运动,要使系统实际自由度为零,为系统施加等于自由度的驱动约束:φD(q,t)=0(2)在ADAMS仿真软件中,对于逆运动学求解就是用Newton-Raphson迭代法求解约束方程式(2)对于任意时刻位置的确定㊂2㊀搬运机械手逆运动学求解运动规划是根据作业要求,对末端执行器在工作流程中位姿变化的路径㊁取向及其速度变化过程的设定[2]㊂要在ADAMS进行机械手的逆运动学的求解,首先要建立机械手CAD模型,然后导入ADAMS中,建立机械臂之间的约束关系,添加驱动函数㊂2.1㊀搬运机械手关节角度求解机械手运动过程为:没有工作时在A点,然后移动到B起始位置,到C点开始夹取工件,目标放置D 点,经过E点回至A点㊂路径如图1所示㊂要实现机械手末端执行器在空间里运行轨迹为规定的五点,且假设末端的位姿不发生变化,仅位置发生变化㊂通过图1中执行器的末端轨迹,可以求出在仿真过程中末端随时间的变化㊂设定仿真时间为10s,每两点之间经过的时间为2s,依次为A-B-C-D-E-A,执行器末端位置坐标与时间的变化如表1所列㊂㊃321㊃㊃机械研究与应用㊃2017年第4期(第30卷,总第150期)㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀制造业信息化∗收稿日期:2017-06-30基金项目:宿迁学院科研基金项目:基于ADAMS六自由度机械手逆解问题的研究(编号:2016ky28);宿迁市科技计划项目:车辆自动稳定杆控制系统的研究(编号:Z201530)作者简介:赵海芳(1982-),女,江苏宿迁人,硕士,实验师,研究方向:机电仿真分析㊂图1㊀机械手路径轨迹图表1㊀执行器末端位置与时间关系位置0s2s4s6s8s10sX0-500-800-400-300100Y0-200100-10050100Z0-200-500-100-500由于机械手的姿态与末端执行器的初始姿态一致,因此,末端执行器绕系统坐标各个轴的转动均为零,因此3个旋转变化都为0∗time㊂3个方向的位置变化使用step函数来定义㊂ADAMS中,Step函数采用的是三次多项式逼近Heaviside阶跃函数㊂函数的格式为:STEP(x,x0,h0,x1,h1),式中x是变量;x0㊁x1为变量x的初始和终止值;h0㊁h1对应于x0,h1的函数值㊂对于执行器末端,通过表1的数据,对执行器末端采用点驱动方式㊂具体驱动函数如下: trax:STEP(Time,0,0,2,-500)+STEP(Time,2, 0,4,-300)+STEP(Time,4,0,6,-400)+STEP (Time,6,0,8,100)+STEP(Time,8,0,10,400) tray:STEP(Time,0,0,2,-200)+STEP(Time,2, 0,4,300)+STEP(Time,4,0,6,-200)+STEP(Time, 6,0,8,50)+STEP(Time,8,0,10,50) traz:STEP(Time,0,0,2,-200)+STEP(Time,2, 0,4,-300)+STEP(Time,4,0,6,400)+STEP(Time, 6,0,8,50)+STEP(Time,8,0,10,50)Rot x=0∗time,Rot y=0∗time,Rot z=0∗time设置好点驱动后,对机械手进行运动仿真㊂此时,在ADAMS平台上可以看到机械手按照给定的工作路径运行㊂当关节变化比较大时,为了避免机械臂之间发生碰撞,可以利用ADAMS提供的传感器功能,限定机械手个关节的转角范围,当有干涉时仿真会自动停止[3]㊂通过ADAMS的测量功能,分别测出5个关节角度随时间的变化㊂在后处理模块可以得到5个关节角变化曲线如图2所示㊂通过速度曲线可以看出各关节角曲线连续平稳无突变,具有较好的光滑性,机器人关节位移变化率小不会产生抖动现象,所以运行过程平稳无大冲击和振动,使关节处零部件的磨损降低,延长机器的使用寿命[4]㊂图2㊀关节角变化曲线3㊀求解角度的验证对于得到的关节角的变化,可以通过在各个关节上添加驱动电机的方式进行验证㊂将上面点驱动删除,在后处理模块中,将测量曲线输出通过SPLINE 工具,将测量出的曲线转换为数值曲线㊂按插值方式不同,分为:CUBSPL(三次样条)㊁CURVE(B样条)㊁AKISPL(Akima)三种函数,采用CUBSPL函数作为关节驱动函数㊂具体步骤如下:(1)查看后处理,joint1的.JOINT_1.Ax_Ay_Az_ Projection_Angles.Z㊂导出该曲线,选中file-export-Table...㊂将导出的文件在浏览器打开,复制所有参数并粘贴在文本文档中㊂(2)在view界面中导入该曲线,选中file-im-port,读取该文本文档㊂(3)在模型树下的element中可以看到样条曲线已经创建成功㊂(4)将SPLINE_1的Y值写入SPLINE_2的X 值处㊂将该样条曲线用函数写入到MOTION_joint1中㊂按照类似的方法创建joint2㊁jiont3㊁joint4的样条曲线并写入到MOTION_joint2㊁MOTION_joint3㊁MO-TION_joint4㊁MOTION_joint5中㊂设定完成后,设置仿真时间为10s,300步进行仿真㊂通过ADAMS后处理模块可以查看末端执行器位置曲线,如图3所示㊂图3㊀末端执行器轨迹对比(下转第130页)㊃421㊃虑到水泥在提供的过程中的凝实和堵塞的情况和水泥凝实所需要的方法与条件㊂(3)凝实水泥的成型功能,主要是能够在现浇成型机浇筑水渠时,将源源不断的产生的凝实的水泥形成固定形状的水渠形态,并且不粘附在现浇成型机的工作面上,需要考虑到生成的水渠的形态和表面平滑度是否合格的情况[3]㊂4㊀发展趋势近年来,我国渠道防渗应用较多的是梯形断面预制混凝土板或现浇混凝土板下铺防渗膜料和现浇混凝土U 型断面等技术,使渠道防渗技术得到了进一步的提高和发展[4]㊂最新项目的实施,采用机电液一体化设计,集成自动输送填料㊁自动振动压实成型㊁防渗渠直线㊁坡度及混凝土壁厚控制技术等先进技术,采用混凝土挤压反力推进自动行走等一系列关键技术,提高节水防渗渠现浇成型机的自动化程度和工作效率,制定混凝土防渗渠工程施工规程,改进防渗渠的施工工艺,通过水渠直线性和一定水流方向坡度的控制减小水资源在防渗渠传输中的消耗㊂降低防渗渠现浇过程中劳动力的投入,节约宝贵的水资源,保障并增强防渗渠的质量㊂此项目研究的全自动节水防渗渠现浇成型机具有自动化程度高㊁机电液一体化集成控制㊁混凝土表面光滑且密度高㊁振捣一致㊁衬砌均匀㊁一次成型㊁工作效率高㊁操作方便等优点㊂经过研究,在关键技术上取得突破,并逐渐掌握一整套具有自主知识产权的全自动节水防渗渠现浇成型机设计㊁制造和试验技术[4-7]㊂5㊀结㊀语全自动节水防渗渠现浇成型机为农田水利灌溉㊁铁路工程㊁高速公路排水渠的构筑提供了高效㊁节能㊁节材㊁省工的工程建设装备,自动化程度高,节约成本,符合国家产业政策,为水利沟渠灌溉产业发展的关键产品,对现浇成型机行业的技术水平的提升,具有带动和辐射作用㊂全自动节水防渗渠现浇成型机的产业化,促进水利机械向自动化㊁集成化方向发展,促进我国现浇成型机的技术进步和产品升级以及更大的产业规模的形成[8]㊂参考文献:[1]㊀赵国俊.关于农田灌溉水渠水利工程项目建设施工技术的要点分析[J].农业与技术,2016,36(16):85-85.[2]㊀刘㊀俊.现浇混凝土渠道的施工技术[J].水利建设与管理,2009,29(3):33-34.[3]㊀孙素元,王文彬,夏基胜,等.一种全自动节水防渗渠现浇成型机:CN203977427U[P].2014.[4]㊀俞国平.灌区渠道防渗加固措施研究[J].水利规划与设计,2012(1):60-62.[5]㊀郭爱荣.U 型砌块成型机设计及其自动控制系统的研究[D].咸阳:西北农林科技大学,2003.[6]㊀瞿㊀潇.渠道混凝土机械化衬砌技术研究[D].南京:河海大学,2006.[7]㊀李典基.大型渠道混凝土机械化衬砌关键技术研究[D].济南:山东大学,2011.[8]㊀唐㊀永.铁力木干渠防渗工程建设及环境影响评价[J].地下水,2015(3):88-89.ʏʏʏʏʏʏʏʏʏʏʏʏʏʏʏʏʏʏʏʏʏʏʏʏʏʏʏʏʏʏʏʏʏʏʏʏʏʏʏʏʏʏʏʏʏʏʏʏ(上接第124页)㊀㊀由图3可知,采用样条曲线添加驱动,末端执行器位置基本重合,同时B 样条曲线本身具有局部支撑性,和可扩展性的优点,当改变或增加差值点不必重新计算整个轨迹㊂所以样条驱动可以快速准确地实现关节轨迹的局部更改㊂方便快捷地完成轨迹规划任务[5]㊂4㊀结㊀论基于ADAMS 软件对搬运机械手进行逆运动学求解,在执行器末端通过添加点驱动,点的坐标为期望轨迹的坐标,通过测量功能测出各关节的角速度线图,判断机械手关节运动平稳性㊂把关节运动曲线生成样条曲线,通过仿真证明利用样条曲线作为轨迹规划的可行性,为机械手物理样机调试提供依据㊂参考文献:[1]㊀陈立平,张云清,任卫群,等.机械系统动力学分析及ADAMS 应用教程[M].北京:清华大学出版社,2015.[2]㊀杨晓钧,李㊀兵.工业机器人技术[M].哈尔滨:哈尔滨工业大学出版社,2015.[3]㊀勾治践.工业机器人路径规划及轨迹优化研究[M].长春:吉林大学出版社,2016.[4]㊀郭卫东,李守忠,马㊀璐.ADAMS2013基于与应用教程[M].北京:机械工业出版社,2015.[5]㊀陈鲁刚,平雪良,徐稀文,等.基于ADAMS 的焊接机器人轨迹规划[J].江南大学学报,2011(2):196-200.[6]㊀赵海芳,刘㊀洁.刚柔耦合数控机床主轴箱动态特性分析[J].机械研究与应用,2014(4):103-104.㊃031㊃。
基于ADAMS固定作业机器人运动仿真

要求 ,实 现抓 取 、搬 运工 件或操 纵工 具 ,是典 型 的机 电一体 化产 品 ,在实 现柔性 制 造 、提高产 品质 量 、代 替人 在恶 劣环境 下工 作等 方面 发挥 着重要 作用 。利用
虚拟 样机 技术 可 以在 设计 阶段 预测 产 品的性能 ,优 化 产 品的设计 ,进 行运 动学 以及 动力 学仿 真 。本 设计 就
的角度 , 。 示升 降缸活 塞上 升 的位移 , 。 d表 d 表示伸缩
缸 的伸 缩位移 , d 表示 o 到伸 缩缸 初始位 置 的距离 , 表示 手腕 转过 的角度 。
图 1 机 器 人 结 构 示 意 圈
机 器人 的运 动学分 析是运 动仿 真 的基础 ,通过 求 解运 动 学方程 的正 、逆解 ,得 到机 器人 手爪 位姿与关
维普资讯
・3 O・
机 械 工 程 与 自 动 化
20 0 6年 第 6 期
节 变量 的关 系 。正解 相对 简单 , 解 采用 P u 等 人提 逆 al 出的反 变换法 。
衰 1 固定作 业机器人 的连杆参数
a 1 i
1 2
更 直观 地 观察 运行 结果 。
2 机器 人实体 模 型的 构造 AD AMS软 件本 身 的三维 建模 功能 不强 ,只能 构
造 一些 简单 的和不 精 确 的模 型 。AD AMS软件有 很 多
专业 模块 , 中 ME HANIM/ r ( r / 其 C S P o P o E接 口) 模块
1 固定 作业 机器 人的 结构
固定 作业 机器 人 的结构示 意 图见 图 1 ,该机 器人
基于 ADAMS 的仿人机器人行走仿真

基于 ADAMS 的仿人机器人行走仿真肖乐;常晋义;殷晨波【摘要】A simulation method combining ADAMS and Matlab was adopted. 3D entity model, kinematics and dy⁃namic model were built in ADAMS. The design and simulation of the control system were realized in Matlab. The data communication between Matlab and ADAMS was realized by the interface module ADAMS/Controls. This sim⁃ulation method lays a foundation for on-line control of humanoid robot.% 采用机械系统动力学仿真分析软件 ADAMS 进行建模和动力学仿真,提供机器人三维实体模型、运动学和动力学模型以及动画仿真。
采用控制系统专业软件 Matlab 进行机器人控制系统设计,提供控制关节目标轨迹、稳定控制算法并输出驱动力矩。
通过ADAMS/Controls 接口模块建立起 Matlab 与 ADAMS 之间的数据接口。
联合仿真方法为实现仿人机器人在线控制奠定了基础【期刊名称】《常熟理工学院学报》【年(卷),期】2012(000)004【总页数】6页(P73-78)【关键词】仿人机器人;虚拟样机;行走稳定性;联合仿真【作者】肖乐;常晋义;殷晨波【作者单位】常熟理工学院计算机科学与工程学院,江苏常熟215500;常熟理工学院计算机科学与工程学院,江苏常熟215500;南京工业大学机械与动力工程学院,南京210009【正文语种】中文【中图分类】TP24由于仿人机器人研制的复杂性,有必要在物理样机制造之前先建立一个虚拟样机系统,在虚拟环境中模拟机器人双足行走的状态,通过模型计算出各个关节的驱动力矩、ZMP点的变化轨迹等,并对设计方案进行优化,提高物理样机研制成功的概率[1-4].为了准确地建立仿人机器人的虚拟样机模型,发挥各类专业软件的优势,本文采用ADAMS软件进行建模和动力学仿真,并在Matlab中建立控制系统,Matlab将机器人关节力矩控制指令传送给ADAMS,ADAMS将通过建立虚拟位置传感器将关节角实时反馈给Matlab,实现联合仿真.ADAMS(Automatic Dynamic Analysis of Mechanical System)是世界上应用最广泛的机械系统动力学仿真分析软件[5-6].它由几十个模块组成,其中最主要的模块为ADAMS/View用户界面模块和ADAMS/Solver求解器,通过这两个模块可以对大部分的系统进行仿真分析.ADAMS/View提供一个直接面向用户的基本操作环境,包括样机的建模和各种建模工具、样机模型数据的输入与编辑、与求解器和后处理等程序的自动连接、虚拟样机分析参数的设置、各种数据的输入和输出、同其他应用程序的接口等.ADAMS/Solver是求解机械系统运动和动力学问题的程序.完成样机分析的准备工作以后,ADAMS/View自动调用ADAMS/Solver模块,求解样机模型的静力学、运动学、或动力学问题,完成仿真分析以后再自动地返回ADAMS/View操作界面.在ADAMS中建立的仿人机器人虚拟样机模型及基本组成部件与主要关节如图1所示,其简化条件为:①腿和地面都是刚性的,不考虑其弹性特征;②忽略纵向平面和横向平面的动力学耦合;③足与地面有足够大的摩擦,在行走过程中,支撑腿脚与地面没有滑动;④忽略关节摩擦.已知所有连杆长度li(i=1,2,3,4,5,6,7)和关节角度,计算仿人机器人摆动腿的位姿.假设各关节在参考坐标系中的坐标为(xi,zi),则运动学方程为仿人机器人重心在固定坐标系中的坐标使用ADAMS/Controls控制模块,将ADAMS/View程序和MATAB控制分析软件有机的连接起来,实现将ADAMS机械系统虚拟样机作为一个机械系统模型引入控制分析软件,ADAMS模型中的输入变量相当于要求的控制量,即关节驱动力矩;输出变量相当于传感器的测量值,即系统的状态信息,主要包括:各个关节的角位移、角速度和角加速度以及整体信息如重心、ZMP等.联合仿真分析包括下面4个基本步骤.(1)构造ADAMS/View样机模型.首先构造ADAMS/View机械系统样机模型,包括几何模型、各种约束和作用力等.(2)确定ADAMS的输入和输出.输出是指进入控制程序的变量,表示从ADAMS/Controls输出到控制程序的变量.输入是指从控制程序返回到ADAMS的变量,表示控制程序的输出.通过定义输入和输出,实现ADAMS和Matlab控制程序之间的信息封闭循环,即从ADAMS输出的信号进入控制程序,同时从控制程序输出的信号进入ADAMS程序.这里所有程序的输入都应该是设置的变量,而输出可以是变量或是测量值.(3)构造控制系统方框图.用Matlab控制程序编写的整个系统的控制图,ADAMS/View的机械系统样机模型设置为控制图中的一个模块.(4)联合仿真.根据各关节自由度实际运动角度,在线计算摆动脚位置(xf,zf)值.控制系统建模的目的是建立一个机械与控制一体化的样机模型,通过向ADAMS 方框图中添加控制系统,实现控制系统的建模,基本步骤如下:(1)启动控制程序Matlab;(2)在Matlab程序中输入ADAMS模块;(3)在Simulink中设置仿真参数;(4)运用Simulink工具,进行控制系统建模.用Matlab/simulink软件建立控制系统框图如图2所示.双击joint control模块,显示关节控制模块的子系统,如图3所示,完成各个控制图标以及下一级模块设置.双击adams_sub模块,显示adams_sub模块的子系统,如图4所示,对其中各个模块参数进行设置.为了准确地建立仿人机器人的虚拟样机模型,发挥各类专业软件的优势,可采用ADAMS软件进行建模和动力学仿真,提供机器人三维实体模型、运动学和动力学模型以及动画仿真.采用应用控制系统专业软件Matlab进行机器人控制系统设计,提供控制关节目标轨迹、稳定控制算法并输出驱动力矩.通过ADAMS/ Controls接口模块建立起Matlab与ADAMS的实时数据管道,Matlab将机器人关节力矩控制指令传送给ADAMS,ADAMS通过建立虚拟位置传感器将关节角实时反馈给Matlab,形成一个完整的闭环控制系统,实现联合仿真,如图5所示.联合仿真程序中,步态通过上身位置与时间的对应关系进行调整,输入PD控制器预先规划好的步态轨迹,同时与实际步态值进行比较,通过计算实际值与规划值之间的差值,得出控制关节所需的扭矩,从而实现对仿人机器人稳定行走步态的控制.但是仅仅对步态的控制还不能满足稳定行走的要求,还需要在行走过程中实时计算ZMP点的轨迹,通过ZMP轨迹点的位置来确定机器人与之对应的姿态,实现仿人机器人的稳定步行.仿人机器人完整动作过程包括:摆动腿抬起,离开地面、向前摆动、到达最高点、继续向前、最后落到地面,仿真步行周期设置为1.0 s,步行速度2 km/h,步幅为520 mm,图6-图8的仿真结果图都能清楚的反映出仿人机器人摆动腿各个关节运动曲线参数的变化情况.可以看出在整个过程中,各个关节曲线连续无突变,ZMP曲线始终位于支持多边形稳定区域内.通过仿人机器人运动过程的计算机仿真,可以直接观察到机器人实际的姿态变化,为实时控制提供了依据.【相关文献】[1]马宏绪.两足步行机器人动态行走研究[D].长沙:国防科技大学,1995.[2]C B Yin,A Albert.Stability Maintenance of a Humanoid Robot under Disturbance with Fictitious Zero-Moment Point[A].IEEE/RSJ International Conference on Intelligent Robots and Systems[C].Edmonton Alberta Canada August,2005:1780-1787.[3]Li Zhaohui,Huang Qiang,Li Kejie,et al.Stability Criterion and Pattern Planning for Humanoid Running[C].Proceedings of the 2004 IEEE International Conference on Robotics and Automation.New Orleans,France:IEEE Press,2004:1059-1064.[4]肖乐,常晋义.仿人机器人下楼梯的自适应模糊控制方法[J].计算机工程,2009,35(13):193-195.[5]徐燕华.复杂产品的虚拟样机仿真研究[D].天津:天津大学机械工程学院,2004.[6]余朝举.基于虚拟样机技术的双足步行机器人设计与研究[D].北京:北京邮电大学,2009.。
基于ADAMS的机器人动力学分析及轨迹规划
基于ADAMS的机器⼈动⼒学分析及轨迹规划2.1 串联机器⼈在ADAMS中⽤连杆模拟机械臂,对两⾃由度的机械臂分别进⾏运动学分析、动⼒学分析及机械臂的轨迹规划。
2.1.1 运动学分析下⾯是建⽴模型并对模型进⾏设置分析的详细过程。
(1) 启动ADAMS/View,在欢迎对话框中选择新建模型,模型取名为Robot_arm,并将单位设置为MMKS,然后单击OK。
(2) 打开坐标系窗⼝。
按下F4键,或者单击菜单【View】→【Coordinate Window】后,打开坐标系窗⼝。
当⿏标在图形区移动时,在坐标窗⼝中显⽰了当前⿏标所在位置的坐标值。
(3) 创建机械臂关节1(连杆)。
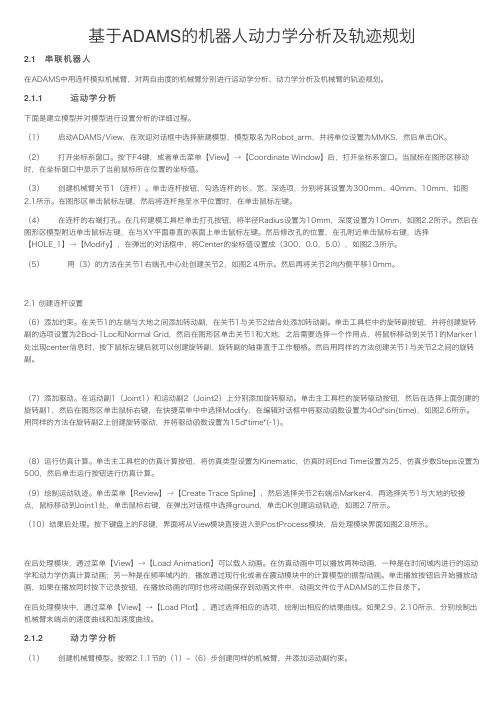
单击连杆按钮,勾选连杆的长、宽、深选项,分别将其设置为300mm、40mm、10mm,如图2.1所⽰。
在图形区单击⿏标左键,然后将连杆拖⾄⽔平位置时,在单击⿏标左键。
(4) 在连杆的右端打孔。
在⼏何建模⼯具栏单击打孔按钮,将半径Radius设置为10mm,深度设置为10mm,如图2.2所⽰。
然后在图形区模型附近单击⿏标左键,在与XY平⾯垂直的表⾯上单击⿏标左键。
然后修改孔的位置,在孔附近单击⿏标右键,选择【HOLE_1】→【Modify】,在弹出的对话框中,将Center的坐标值设置成(300,0.0,5.0),如图2.3所⽰。
(5) ⽤(3)的⽅法在关节1右端孔中⼼处创建关节2,如图2.4所⽰。
然后再将关节2向内侧平移10mm。
2.1 创建连杆设置(6)添加约束。
在关节1的左端与⼤地之间添加转动副,在关节1与关节2结合处添加转动副。
单击⼯具栏中的旋转副按钮,并将创建旋转副的选项设置为2Bod-1Loc和Normal Grid,然后在图形区单击关节1和⼤地,之后需要选择⼀个作⽤点,将⿏标移动到关节1的Marker1处出现center信息时,按下⿏标左键后就可以创建旋转副,旋转副的轴垂直于⼯作栅格。
然后⽤同样的⽅法创建关节1与关节2之间的旋转副。
ADAMS环境下工业机器人运动控制和联合仿真毕业论文

摘要虚拟样机技术就是在建造第一台物理样机之前,设计师利用计算机技术建立机械系统的数字化模型,进行仿真分析并以图形方式显示该系统在真实工程条件下的各种特性,从而修改并得到最优设计方案的技术。
ADAMS软件是目前国际上应用最为广泛的虚拟样机分析软件,用户可以运用该软件非常方便地对虚拟机械系统进行静力学、运动学和动力学分析。
但针对复杂的机器人机械系统,要想准确的控制其运动,仅依靠ADAMS软件自身也很难做到;MATLAB软是Mathworks公司开发的一种集计算、图形可视化和编辑功能于一体的优秀数学应用软件,具有强大的计算能力,能够建立复杂的控制模型准确控制复杂机器人系统的运动;OpenGL(开放式图形库全称)是SGI公司开发的底层三维图形API,目前在图形开发领域已成为工业标准。
使用OpenGL可以创建视觉质量接近射线跟踪程序的精致漂亮的3D图形。
Visual C++ 6.0已经成为集编辑、编译。
运行、调试为一体的功能强大的集成编程环境,在Windows编程中占有重要地位。
OpenGL和Visual C++ 6.0有紧密接口,利用二者可以开发出优秀的视镜仿真系统。
ADAMS、MATLAB和Visual C++ 6.0由于定位不同,都有各自的优势和缺点,但是三者之间又可以通过接口联合控制或者混合编程。
本文分别利用ADAMS对三自由度机器人的运动学和轨迹优化方案进行研究,利用Visual C++ 6.0、OpenGL 和从MATLAB里导出的控制模型的数据对三自由度机器人进行了视景仿真的研究。
论文首先通过建立坐标系和矩阵变换,对刚体的空间表示进行了阐述,然后采用通用的D-H法则,将机器人关节角度参数化,推导出其正运动学方程和逆运动关节角,并计算出机器人手部的初始坐标。
其次采用ADAMS软件,详细介绍了机器人三维建模过程,包括整体框架构建,单个构件绘图和布尔运算等,并对机器人关节点进行了参数化设计。
最后从机器人轨迹规划的基本原理和方法出发,比较分析了关节空间轨迹规划和直角坐标空间轨迹规划的差别,并采用三次多项式和五次多项式对机器人进行了轨迹规划,利用ADAMS软件中内嵌的Step函数对运动轨迹进行了仿真分析。
基于ADAMS的机器人动力学仿真研究
建立四自由度机器人简化模型,利用D-H法建立机器人各关节坐标系,并求得机器人运动学方程和雅可比矩阵,针对作业对象和要求,在机器人末端实现直线和圆弧轨迹两种工况下,运用几何法分别求得其运动学逆解,为运动学仿真做了必要的准备。
由于作业空间对于该机器人的设计很重要,本论文采用蒙特卡罗概率算法对机器人机械臂作业空间进行了求解,在MATLAB中输出机器人的作业空间图,结合实际作业目标,来确定机器人机械臂参数,如果作业空间不满足要求,则重新设计机械臂长度参数,直至最终满足要求。
3.期刊论文蓝培钦.言勇华码垛机器人的动力学仿真及控制研究-机械设计与制造2010,""(7)
动力学是高速码垛机器人设计过程中必须考虑的问题,但要建立机器人精确的动力学模型比较困难.通过UG建立机器人实体模型,并将其导入ADAMS,在仿真环境中调整相应参数,得到机器人的动力学仿真模型,再利用SIMULINK建立控制框图,通过两者的结合进行机器人控制系统仿真.机器人控制算法采用基于CMAC与PID的复合控制,仿真结果表明该复合控制算法可有效地用于机器人实时控制.与传统PID控制算法相比较,机器人的响应速度、控制精度,鲁棒性等动态特性得到了明显的提高.
基于Matlab与Adams软件的机器人虚拟仿真教学实验设计
(下转第114页)
98
中国航班
CHINA FLIGHTS
遥交感通与勘物测流
TRraenmsoptoertSaetniosninagnadnLdoSguisrtviecys
的体验。在网络上发展的环境下,人们的 生活和工作都有了极大的改变,这也为公 路运输产业带来了积极的影响,通过网络 的模式的结合,建立共享系统,实现信息 的共享利用,同时加强服务的功能,使公 路运输经济的发展得到更加有效的支持。
摘要:机器人在运输行业中应用十分 广泛,而性能优异的机器人需要具有多学 科知识背景的专业人员设计。机器人的机 械本体和控制器设计是机器人研制的关键 环节,通过 Matlab 软件和 Adams 软件对 机器人进行运动仿真教学实验设计,可以 提前检验所设计的机器人是否满足要求, 该仿真验证案例也可供专业机器人设计人 员借鉴。
图1 机器人模型 基金项目:重庆市研究生教改项目(yjg193061,yjg193066)
首先建立水平位置的基座模型,在功能区 Bodies 项的 Solids 中,单击 RigidBody:Box 图标,勾选复选框,输入尺寸参数,光标 移至工作区,会显示基座矩形体,完成几 何模型创建,同理完成机器人 x、y 和 z 关 节模型创建。终上所述,建立的直角坐标 型机器人几何模型如图 1 所示。定义输出 与输入的系统变量和数据变量,用于软件 间的数据传递,直角坐标型机器人有三个 平移驱动力,需要在 Matlab 中传入控制数 据,定义 input1 系统输入变量间关联到 z 轴驱动力 SFORCE_1,定义 Input2 系统输 入变量间关联到 y 轴驱动力 SFORCE_2, 定义 Input3 系统输入变量间关联到 x 轴驱 动力 SFORCE_3。
基于ADAMS的搬运机械手轨迹规划与仿真
郭柏林 , 胡正义
(武汉理工大学机电工程学院 , 湖北 武汉 430070)
[摘 要 ] 对一种新型机械手的运动轨迹进行了规划分析 ,并结合计算机对该系统运动进行了仿真 ,得到了该
机械手的一些动态参数 ,为该机械手物理样机的实现提供了科学依据.
[ 关键词 ] 机械手 ; 轨迹规划 ; 动力学仿真 ; ADAMS
0. 5303 t4 - 0. 1061 t5 .
(起始时刻 ti = 0 ;终止时刻 tf = 2) . 采用同样的求解方法 ,可以得到整个运动轨迹
A —B —C —D 里的关节角度随时间变化的方程 ,并
在 MA TL AB 中绘制如图 3~图 5 所示. 采用同样
的计算方法 ,可以分别计算其它关节的角度 、角速度
c4 , c5 均为方程的常数项[1 ] . 对于关节 1 ,根据机械手的逆运动学可以得到
每一段起点和终点的角度 ,即对于一段待规划的轨
迹可以得到两个等式 ;机械手的运动平缓 ,这里令每
一段的起点和终点的角速度与角加速度均为 0 ,即
对于这段轨迹 ,可以建立另外的 4 个等式.
对于轨迹 A →B ,关节 1 θ1ABi = θ1 ( A ) = θ1 ( t = ti ) = 73. 255°
图 11 末端执行器沿 X 轴的速度
4 结论
图 9 关节 1 的扭距
本文通过对搬运机械手运动轨迹的规划 ,为该 机械手的平稳运动控制提供了相应的数学方程 ;同 时通过计算机仿真 ,验证了机械手的运动情况与所 规划的轨迹相符 ,进一步还仿真了机械手的各关节 的输入扭矩和功率等相关参数 ,为所设计的机械手 物理样机的实现提供了科学依据.
[ 中图分类号 ] T H113
基于ADAMS的仿人机器人步态规划算法仿真和实现
基于ADAMS的仿人机器人步态规划算法仿真和实现刘凯【摘要】论文从便于算法分析和保护仿人机器人物理样机的角度,提出了先利用ADAMS建立虚拟原理样机系统,再进行步态算法仿真和实现的方法.并详细阐述了基于ZMP的仿人机器人步态规划算法,以及如何利用ADAMS对步态规划算法进行仿真.最后通过实验验证了仿真的必要性和有效性.【期刊名称】《微型电脑应用》【年(卷),期】2010(026)003【总页数】3页(P51-53)【关键词】仿人机器人;步态规划算法;ADAMS【作者】刘凯【作者单位】上海交通大学自动化系,上海,200240【正文语种】中文【中图分类】TP2730 引言仿人机器人步态规划算法,是仿人机器人运动控制中非常重要的部分。
近年来步态规划算法发展非常迅速,并成为仿人机器人研究的一个重要分支。
由于仿人机器人研制的复杂性,非常有必要建立一个与其物理样机一样的虚拟原理样机系统[1],这样既能够在建立物理样机之前进行运动学仿真,验证关节驱动力矩是否符合各种运动的要求,又便于评估仿人机器人步态规划算法的有效性。
在进行仿人机器人步态行走实验前,从保护仿人机器人物理样机的角度,先利用ADAMS仿真软件,在虚拟原理样机系统进行步态算法仿真,从而验证步态算法的稳定性和有效性,显得十分必要。
1 步态规划算法介绍目前用于仿人机器人步态规划的方法很多,例如:几何约束规划法、模糊逻辑规划法、神经网络规划法、遗传算法规划法和自然步态规划法等。
这些步态规划方法,实际上都是基于ZMP稳定性判据的规划方法[2]。
公认的ZMP定义为:机器人在行走过程中,其自身重力和惯性力合力的延长线与支撑面的交点[3],也就是说只要仿人机器人在行走过程中,保证其ZMP落在其双足支撑区域内,且该点合力的力矩为零,就可以保证其稳定的行走。
本文也采用一种基于 ZMP的仿人机器人离线步态规划算法进行仿真研究,用于验证ADAMS在仿人机器人步态规划算法验证的必要性和有效性。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Z H A N G H a o , S U N Q i a n g ,L I L o n g - j i n g , C O N G Mi n g
( 1 . S c h o o l o f T e c h n o l o g y ,T i e l i n g No r ma l C o l l e g e, T i e l i n g L i a o n i n g, 1 1 2 0 0 0,C h i n a; 2 . S c h o o l o f Me c h a n —
连 1 1 6 0 2 3 )
摘要 : 为 了提 高硅 片传 输机 器人运 动 的平 滑性 , 采 用 5次均 匀 B样条插 值 方法进 行轨 迹 规 划 , 并利 用 两种 遗传 算法 对轨迹进 行优 化 。 以硅 片传 输机 器人 为研 究对 象 , 基于A D A MS软 件 对机 器人 进 行 轨
中图分 类号 : T P 2 4 2 文献标 识码 : A
P l a n n i n g a n d S i mu l a t i o n o f Wa f e r - h a n d l i n g R o b o t T r a j e c t o r i e s B a s e d o n A DA MS
迹仿 真分析 。 结果表 明 , 自适应 混合 遗传 算法 与 自适 应遗传 算 法相 比 , 具有 较好 的 局部 搜 索 能 力 , 能 够得 到性 能更好 的 解。 获得的轨 迹 具有脉 动连 续的特 点 , 有利 于提 高机 器人在 运动 过 程 中的 轨迹 跟
踪精 度 。
关键 词 : 轨 迹规 划 ; 机 器人 ; A D A MS ; 遗传 算 法
文章编号 : 1 0 0 1— 2 2 6 5 ( 2 0 1 3 ) 0 2— 0 0 7 0— 0 4
基于 A D A M S 的硅 片传输机器人轨迹规划及仿真
张 昊 , 孙 强 , 李 龙 晶 , 丛 明
( 1 . 铁 岭师 范高等 专科 学校 理工 学 院, 辽 宁 铁 岭 1 1 2 0 0 0 ; 2 . 大连 理工 大 学 机械 工 程 学 院, 辽 宁 大
g r e e i s e x p l o i t e d i n o r d e r t o g e t j o i n t t r a j e c t o r i e s . T w o k i n d s o f g e n e t i c a l g o r i t h m a r e p r o p o s e d t o s o l v e t h e
Ab s t r a c t :I n o r de r t o i mp r o v e r u n n i n g s mo o t h n e s s o f wa f e r ・ h a n d l i n g r o b o t ,u n i f o r m B— s pl i n e s o f iv f e de —
第 2期
2 0 1 3年 2月
组 合 机 床 与 自 动 化 加 工 技 术
Mo dul a r Ma c hi ne To o l& Aut o ma t i c Ma nu f a c t u r i n g Te c hn i qu e
NO . 2 Fe b. 2 0 1 3
i c a l E n g i n e e r i n g ,D a l i a n U n i v e r s i t y o f T e c h n o l o g y , D a l i a n L i a o n i n g l 1 6 0 2 3 , C h i n a )
0 引 言
硅 片传输 机 器 人 是 I c制 造 装 备 的重 要 组 成 部 分, 在 加工过 程 负 责硅 片 的传 输 和 定 位 两个 重 要 任 务, 其 工作 速度 、 定位 精 度 直接 影 响硅 片 的 生产 效 率 和质量 ¨ 。轨 迹 规 划 是 机 器 人 轨 迹 控 制 的基 础 , 是
g o r i t h m a b o v e u s e d c a n i mp r o v e t h e s o l u t i o n q u a l i t y .T h e t r a j e c t o r i e s g e n e r a t e d b y t h e p r o p o s e d p l a n n e r h a v e t h e a d v a n t a g e o f c o n t i n u o u s j e r k , c a n i m p r o v e t h e t r a j e c t o r y t r a c k i n g a c c u r a c y i n t h e mo v i n g p r o c e s s . Ke y w o r d s :t r a j e c t o r y p l a n n i n g ; r o b o t ; A D AMS ; g e n e t i c a l g o r i t h m
o pt i mi z a t i o n p r o b l e ms i s i s i mpl e me n t e d b a s e d o n AD AM S.Th e r e s u l t s s h o w t ha t t h e a l —