一种基于增量式数字PID算法的智能温度控制器_林海波
基于增量式PID算法的温室温湿度控制系统设计
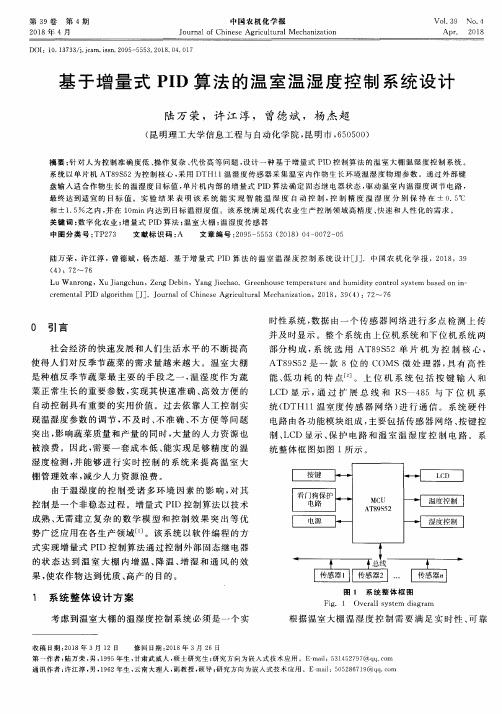
图 1 系统 整 体 框 图
Fig. 1 Overall system diagram
根据 温 室大棚 温 湿 Fra bibliotek 控制 需 要 满 足 实 时 性 、可 靠
收 稿 日期 :2018年 3月 12日 修 回 日期 :2018年 3月 26 日 第 一 作 者 :陆万 荣 ,男 ,1995年 生 ,甘肃 武 威 人 ,硕 士 研 究 生 ;研 究 方 向为 嵌 入 式 技 术 应 用 。E—mail:531452797@ qq.COII1 通 讯 作 者 :许 江 淳 ,男 ,1962年 生 ,云南 大理 人 ,副 教 授 ,硕 导 ;研究 方 向 为嵌 人 式 技 术 应 用 。E mail:5052867l9@qq.com
第 39卷 第 4期 2018年 4月
中 国 农机 化 学 报 Journal of Chinese Agricultural M echanization
V o1.39 N O.4 A pr. 2O18
基 于增 量 式 PID算 法 的温 室温 湿 度控 制 系统 设计
陆 万 荣 ,许 江 淳 , 曾德 斌 ,杨 杰 超
增量式pid水温控制算法

增量式pid水温控制算法随着电子技术和现代控制理论的不断发展,PID控制已成为现代工业控制的主要方法之一。
PID控制广泛应用于温度、压力、流量、位置、速度等过程变量的控制。
PID控制算法具有简单易用、控制效果良好等优点,并且PID控制算法很容易实现,适用于实时控制系统。
本文将介绍增量式PID水温控制算法。
增量式PID控制算法是一种特殊的PID控制算法,是将传统的PID算法分为两个部分,即比例环节和积分环节,从而使控制操作更加灵活,具有更好的性能。
增量式PID控制算法的实现步骤如下:1. 初始化控制参数:设置比例常数(Kp)、积分常数(Ki)和微分常数(Kd)。
这些值根据实际情况进行调整。
2. 读取当前温度和设定温度:测量当前水温和输入设定温度。
3. 计算误差: 用设定温度减去当前水温,得到误差值e(t)。
4. 计算比例环节输出:将误差e(t)乘以比例常数Kp,得到控制增益Kp*e(t),即比例环节输出。
7. 计算增量:将比例环节输出、积分环节输出和微分环节输出相加,得到控制器的增量u(t)。
8. 计算控制器输出:将增量u(t)加上上一个采样时刻的控制器输出y(t-1),得到控制器的输出y(t)。
9. 输出控制信号:将控制器的输出y(t)送入调节阀,控制水温。
上述步骤中,步骤4、5、6的输出数据是针对当前时刻的增量,是增量式PID控制算法的特点。
增量式PID控制算法相对于传统的PID控制算法,具有以下优点:1. 控制精度更高:增量式PID控制算法可以快速响应温度的变化,更加准确地控制水温。
2. 控制性能更加可靠:增量式PID控制算法可以避免由于控制误差积累,导致控制器的输出出现偏差。
3. 更加灵活:增量式PID控制算法可以根据不同的控制目标,以及不同的采样周期和控制参数设置,实现不同程度的控制效果。
总之,增量式PID水温控制算法是一个实用的控制算法,可以广泛应用于各种水温控制系统中,具有控制精度高、控制性能可靠、监控及状态检测等多种功能特点,能够更好地满足实际应用需求。
论文基于数字PID的温度自动控制系统设计毕业论文
论文基于数字PID的温度自动控制系统设计毕业论文论文基于数字PID的温度自动控制系统设计毕业论文目录引言 (1)1 绪论 (2)1.1 本课题的设计要求 (2)1.2 本文的主要内容 (2)1.3系统原理及设计 (3)2 系统硬件设计 (5)2.1 温度检测 (5)2.1.1 传感器选择 (5)2.1.2 热电偶冷端温度补偿 (6)2.1.2 测量放大电路 (7)2.2 A/D转换器的选择 (7)2.3 CPU选择 (9)2.4 声光报警和报警处理 (12)2.5 温度显示 (12)2.6可控硅调功控温 (14)2.6.1 调功电路设计 (14)2.7电源设计 (15)2.8主回路设计 (16)3 控制算法研究 (17)3.1 PID的控制概述 (17)3.2 PID控制 (17)3.2.1 位置式PID控制算法 (18)3.2.2增量式PID控制算法 (19)3.2.3积分分离PID算法 (19)4 系统软件设计 (21)4.1 系统主程序流程图设计 (21)4.2 积分分离PID控制流程设计 (21)4.3 A/D转换流程图设计 (21)5 结论 (25)致谢 ......................................................................................... 错误!未定义书签。
参考文献.. (26)附录A 译文 (27)附录B 原文 (36)附录C程序 (50)附图D 电路图 (61)辽宁工程技术大学毕业设计(论文)引言在科学实验中广泛应用恒温箱,尤其在老化试验中对高温恒温箱应用的更多,所以对恒温箱的研究越发重要[1]。
本课题设计一个高温恒温箱,采用数字PID算法对采集进来的信号进行处理,在调节功率部分,特色采用零点检测技术,运用可控硅调节功率,这样可以做到实时调功,安全稳定,而且工作效率比较高,节电环保。
孙作斌:基于数字PID的温度自动控制系统设计1 绪论1.1 本课题的设计要求本设计是基于数字PID的温度自动控制系统,要求设计一个恒温箱,保温范围为800到850摄氏度,当温度超过850摄氏度时候,启动风扇进行散热。
基于PID算法的智能水温控制器的设计

基于PID算法的智能水温控制器的设计
雷声勇
【期刊名称】《机床电器》
【年(卷),期】2010(037)002
【摘要】设计了以AT89S52单片机为控制核心,以DS18B20温度传感器为温度检测元件,以固态继电器(SSR)为温度控制执行机构的智能水温控制器,在软件实现上采用PID算法,以获得良好的控制效果.
【总页数】3页(P48-49,52)
【作者】雷声勇
【作者单位】柳州铁道职业技术学院,545007
【正文语种】中文
【中图分类】TP368.1
【相关文献】
1.基于遗传算法的PID智能控制器设计 [J], 占自才
2.基于增量式PID算法的水温自动控制器设计 [J], 文波;孟令军;张晓春;韩朝辉;赵盼盼
3.基于智能算法的PID励磁控制器优化设计 [J], 陈勇
4.基于智能算法的PID控制器参数优化设计的应用研究 [J], 贺慧杰
5.基于AVR单片机和PID算法的水温控制器 [J], 李震;洪添胜
因版权原因,仅展示原文概要,查看原文内容请购买。
基于PID算法的温室内温湿度智能控制系统

技术Special TechnologyI G I T C W 专题74DIGITCW2020.080 引言PID 算法是一种采样控制算法,通过对控制量的计算得出准确可行的计算机控制语言,由于该算法具有计算结果进准度高,计算过程中不需要建立数学模型,应用起来简单快捷,被广泛应用到各个领域中。
温室内温湿度智能控制系统可用于农作物生长环境的实时监测,根据控制算法的设置,为温室制造出最适合农作物生长的温湿度环境。
传统温室内温湿度控制系统由于控制精准度低、控制不稳定等问题,已无法满足植物养殖的需求[1]。
所以运用PID 算法设计温室内温湿度智能控制系统,提高系统对温室温湿度控制的精准度。
1 温室内温湿度智能控制系统设计1.1 系统硬件设计系统的硬件结构设计由微处理器、传感器以及电源电路等设备构成。
微处理器是系统的控制板块,同时也是系统的核心部分,该设备是负责执行系统的控制指令[2]。
为了保证系统对温室温湿度智能高效控制功能,此次选用14位SLZ 系列单片机SLZ2016-558微处理器,该设备采用先进的PPC 结构,绝大多数系统控制指令可以在15秒钟内完成,具有较高的运行速度,该设备具有内外多种中断工作模式,有利于系统中断程序的设计和低电压检测功能的实现[3]。
由于该微处理器具有低功耗特点,增加了系统的工作时间,在设备安装时,设备工作电压要控制在2.6~4.3V 范围内,保证微处理器平稳顺利运行。
硬件设计上选用了温度和湿度两种传感器。
在温室内外各安装一套温湿度传感器,并将传感器的传输方式设置为模拟量传输,其具体性能指标设置为:温度传感器型号为TL-W ,测量范围0~60℃,输出为Rs600,误差为0.01;湿度传感器型号为TL-N ,测量范围0~95%RH ,输出为Rs500,误差为0.01。
为了保证电源电压稳定,系统在运行时一般采用4.5V 电压供电,并且分别在系统输入端口和输出端口安装经线性稳压电源LMIII9GT-3.0V 和LMIII9GT-1.5V ,将系统的供电电压降低到3.0V 和1.5V 。
基于单片机和PID算法的温度智能控制系统设计
基于单片机和PID算法的温度智能控制系统设计
祖一康;徐妙婧
【期刊名称】《现代电子技术》
【年(卷),期】2024(47)8
【摘要】为提高温度控制的智能化水平,设计一种智能温度控制系统。
该系统以STC89C52单片机为控制器,采用PID算法控制温度,具有语音播报和手机远程控制等功能。
采用DS18B20温度传感器采集环境温度;设计LCD12864显示电路实时显示当前温度、温度上下限以及温度状态;设计WT588D语音提醒电路,当测量温度小于下限或大于上限时发出语音提醒;设计按键电路实现温度上下限值的设定;设计蓝牙通信电路,与手机APP通信,实现远程控制;采用PID算法输出控制量,控制固态继电器驱动加热或降温装置,实现温度控制。
其次,对温度控制系统的硬件和软件进行设计,并制作实物进行运行测试。
实验结果表明,所设计的温度控制系统能够很好地实现温度控制,从而达到预期效果,且操作方便、成本低,具有较强的应用价值。
【总页数】7页(P83-89)
【作者】祖一康;徐妙婧
【作者单位】黄冈师范学院机电与智能制造学院;黄冈师范学院物理与电信学院【正文语种】中文
【中图分类】TN915-34;TP277
【相关文献】
1.基于遗传算法的温度PID智能控制系统设计
2.基于PID的电热炉温度智能控制系统设计
3.基于PID的电热炉温度智能控制系统设计
4.基于PIC单片机和PID算法的晶间腐蚀实验智能控制系统的设计
5.一种基于智能控制算法的芯片烘箱PID 温度控制器
因版权原因,仅展示原文概要,查看原文内容请购买。
基于单片机和PID算法的温度智能控制系统设计

现代电子技术Modern Electronics TechniqueApr. 2024Vol. 47 No. 82024年4月15日第47卷第8期0 引 言在工农业生产和人们日常生活中,温度是重要的控制量之一,例如:在冶金、窑炉、粮库、温室大棚、生物、医药、化工、休闲及居住场所等方面都需要对温度进行实时监测和控制[1⁃3]。
在某些生产领域,温度控制直接关系到产品的质量和性能,需要更加精确的温度控制系统[4⁃5]。
温度具有滞后、惯性大、非线性等特点,很难精确控制[6],为此,文中设计了一款智能温度控制系统,采用STC89C52单片机为控制器。
PID 算法因其控制方法简单、效果好,在工业领域的温度控制方面被广泛应用[7⁃9],DOI :10.16652/j.issn.1004⁃373x.2024.08.013引用格式:祖一康,徐妙婧.基于单片机和PID 算法的温度智能控制系统设计[J].现代电子技术,2024,47(8):83⁃89.基于单片机和PID 算法的温度智能控制系统设计祖一康1, 徐妙婧2(1.黄冈师范学院 机电与智能制造学院, 湖北 黄冈 438000; 2.黄冈师范学院 物理与电信学院, 湖北 黄冈 438000)摘 要: 为提高温度控制的智能化水平,设计一种智能温度控制系统。
该系统以STC89C52单片机为控制器,采用PID 算法控制温度,具有语音播报和手机远程控制等功能。
采用DS18B20温度传感器采集环境温度;设计LCD12864显示电路实时显示当前温度、温度上下限以及温度状态;设计WT588D 语音提醒电路,当测量温度小于下限或大于上限时发出语音提醒;设计按键电路实现温度上下限值的设定;设计蓝牙通信电路,与手机APP 通信,实现远程控制;采用PID 算法输出控制量,控制固态继电器驱动加热或降温装置,实现温度控制。
其次,对温度控制系统的硬件和软件进行设计,并制作实物进行运行测试。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
图 1 数字 P ID 控制系统框图
设模拟 P ID 调节器的输出值为 uo , 则 :
PID 参数是根据控制对象的惯量来确定的[ 2 , 4] 。 大惯量如 :烘烤房 的温度控 制 , 一 般 P 可在 10 以 上 , I 在(3 , 10)之间 , D 在 1 左右 。小惯量如 :一个 小电机闭环控制 , 一般 P 在(1 , 10)之间 , I 在(0 , 5) 之间 , D 在(0. 1 , 1)之间 , 具体参数要在现场调试时 进行修正 。
PID 智能温度控制器硬件设计方案[ 4] 采用单回 路闭环控制方式 , 结构主要包括单片机构成的微控 制器 , 加热电路 , 温度采集 , 温度显示与键盘 。 系统 采用热敏电阻作为测温装置 , 经过三点式线性校正 、 运算放大器放大 , 转换成一定的电压值 , 由 LM331 经过 V /F 转换把频率信号输入单片机处理 。 显示 器显示各种需要的信息 , 键盘用于控制器的操作和 K P 、K I 、K D 参数的设定 。 比较器和 PID 控 制器由 单片机程序构成 , PID 控制器输出的控制量变换成 宽度可调的脉冲信号去控制晶 闸管导通时间 的多 少 , 从而来控制电加热器的热量 , 达到控制温度的目 的 。 PID 智能温度控制器控制框图如图 5 所示 。
K P ——— 比例系数 , K I
=K PT TI
为积分系数 ,
KD
=K PTD T
为微分系数 。
为了获得较好的控制效果 , 必须使 K P 、K I 、K D
有一组恰当的值 , 由于数字 P ID 调节器的输出与输
入关系是由计算机软件决定的 , 所以对数字 P ID 控
制器参数的整定 , 实际上是通过控制器的键盘进行
主程序模块主要工作是上电后对系统初始化和 构建系统整体软件框架 。其中初始化包括对单片机 的初始化 、A / D 程序初始化和串口初始化等 。然后 等待温度设定 , 若温度已经设定好了 , 判断系统运行 键是否按下 , 若系统运行 , 则依次调用 各个相关模 块 , 循环控制直到系统停止运行 。 3. 3 数据采集 A /D 模块
数据处理模块 、控制算法模块等组成 。 主模块的功
4 结语
本文主要研 究了基于 PID 算法的 智能温度控 制系统的设计 。以 A T 89C52 单片机为核心进行了 系统硬件方案设计 , 输入通道采用热敏电阻温度传 感器 , 输出通道采用晶闸管作为输出控制元件 。 通 过对占空比的调节可实现温度的自动控制 。 PID 智 能温度控制器与一般的单片机应用区别不大 , 关键
图 4 增量式 P ID 控制算法程序流程图
1. 3 P ID 参数整定 P ID 调节器的参数整定方法有很多 , 可归结为
88
长春工程学 院学报(自然科学版)
2011 , 12(3)
理论计算法和工程整定法 2 种[ 2 , 3] 。实际用得较多 的还是工程整定法 。 这种方法最大的优点就是整定 参数时不依赖对象的数学模型 , 简单易行 。
∫ uo =K P
e +1 TI
ed t
+TD
de dt
+ue[ 1]
(1)
式中 :uo ——— 调 节器 的输 出 , 作用 在 执行 器 上的
信号 ;
e ——— 调节器的输 入 , 是 给定值 和反馈 值的
差值 ;
ue ——— 调节器的输入 e =0 时的输出值 ;
K P 、T I 、TD ——— 比 例 增益 、积分 、微 分时 间 常数 。
林海波 , 等 :一种基于增量式数字 P ID 算法的智能温度控制器
89
在于 P ID 控制软件的设计和 K P 、K I 、K D 参数的整 定 , 关键在于对电加热器接口电路的设计和控制方 案的选定 。
系统通过 LabV IEW 仿真测试[ 5 - 6] , 具有 较高 的精确度和稳定性 , 较好地实现了实际生产中对于 温度的智能控制 。
在使用计算机后 , 需要对模拟信号进行离散化
处理 。设计算机的取样时间为 T , 以一系列取样时刻
点 kT 代替连续时间 T , 以和式代替积分 , 以增量代
替微分 , 可得到数字 PID 的关系式 :
k
∑ u(k) = K Pe(k) + K I e(j) + K D[ e(k) j =0
E(k - 1)] [ 1]
能是为其余几个模块构建整体框架及初始化工作 ; 数据采集模块的作用是将热敏电阻采集的温度信号 转换成电压 值 , 再由 LM 331 转换成频 率信号送入 单片机 ;数据处理模块是将采集到的数据进行线性 化处理和滤波处理 ;控制算法模块完成控制系统的 P ID 运算并且输出控制量 。 3. 2 主程序模块
林海波1 , 王晓曦2 , 刘奭昕2
(1. 长春工程学院电气与信息工程学院 , 长春 130012 ; 2. 大连理工大学电子信息与电气工程学部 , 大连 116023)
摘 要 :阐述了一种基于增量式数字 PID 算法的智
能温度控制器的实现 , 并对数字 P ID 算法及硬件方
案的实现进行了分析 。 通过软硬件的设计 , 完成了
执行器往往是模拟量 , 通过 D /A 转换 , 把输出 的数字量变换成模拟量去驱动执行器 , 由执行器的 动作来改变被控对象的状态 , 达到控制的目的 。 在 许多控制应用场合 , 需要对被控对象状态的变化过 程等记录 、打印 , 需要将操作设定的内容保存 、记录 装置 。有的控 制系统需要进行 集散控制或数 据传 送 , 要通过串行通信进行数据传送或控制 , 要设计串 行口通信 , 以便上位机与下位机之间的通信 。
数据采集模块的任务是负责温度信号的采集以 及将采集到的信号通过 A / D 转换器转化为相应的 数字量提供给单片机 。数据采集 A /D 模块的程序 流程图如图 6 所示 。
图 6 A /D 转换程序流程图
图 5 P ID 智能温度控制器控制框图
3 系统软件设计
3. 1 软件组成 系统的软件主要由主程序模块 、数据采集模块 、
0 引言
温度的检测和控制在理论上发展比较成熟 , 但 在实际测量和控制中 , 如何保证快速实时地对温度 进行采样 , 确保数据的正确传输 , 并能对所测温度场 进行较精确的控制 , 仍然是目前需 要解决的问题 。 自动控制有多种形式 , 有开环控制 、单闭环控制 、串 级回路控制等 ;有许多 实施控制的方 法 , 有顺 序控 制 , 有继电器逻辑控制 , 有比例 、积分 、微分控制(即 PID 控制), 有自适应和模糊控制等 , 而单闭环 PID 控制是应用最广泛的一种控制 。
K p [ e(k)- e(k - 1)] +K Ie(k) +K D [ e(k) -
2e(k - 1) +e(k - 2)]
(3)
式中 :k ——— 取样信号 , 取 0 , 1 , 2 , …;
e(k)——— 第 k 次取样的偏差值 , e(k - 1) 为第
k - 1 次的取样偏差值 ;
u(k)———PID 控制器第 k 次输出值 ;
本系统设计的核心算法为增量式 P ID 算法 , 它 根据本次采样的数据与设定值 进行比较得出 偏差 e(k), 对偏差进行 P 、I 、D 运算 , 利用运算结果控制 脉冲的占空比来实现对双向晶 闸管导通时间 的控 制 , 进而控制加热器的温度 , e(k)可按式(3)求出 。
2 系统硬件设计方案
在 P ID 智能控制器中 , 如何实现 PID 控制是关 键 。一般情况下 , 可应用增量式 PID 控制算法进行 控制 , 系统结构如图 3 所示[ 1 - 2] 。
Hale Waihona Puke 图 3 增量式 P ID 控制系统结构图
增量式 P ID 控制算法的表达式如下 :
Δu(k) = u(k)- u(k - 1) =
K P 、K I 、K D ——— 分别为比例 、积分 、微分系数 ;
Δu(k)——— 第 k 次相对于第k - 1 次的控制量
的增量 。
增量式 P ID 控制算法在控制过程中 , 每次输出
的控制值只是控制的增量 , 执行器每次的变化量较
小 , 使被控对象的参数变化缓 慢 , 控制 系统相对稳
定 , 它的算法程序如图 4 所示 。
为减少体积 , 便于使 用 , 大部分 P ID 智能 控制 都选 用 单片 机 来设 计 , M CS-51 系列 单 片机 中 的
A T 89C52 有 256B 的 内 部 RAM 和 8 kB F lash ROM , 并 且可 以通过 I / O 口 扩展 技术 , 扩展 外界 RA M 和 ROM , 增加单片机的数据存储能力和程序 存储能力 , 是 P ID 智慧控制器的理想的单片机 。
25 /38 8 6-8 9
长春工程学院学报 (自然科学版) 2011 年 第 12 卷 第 3 期 J. Chang chun Inst. T ech.(Na t. Sci. Edi.) , 2011, Vo l. 12 , N o. 3
ISSN 1009-8984 CN 22-1323 /N
一种基于增量式数字 P ID 算法的智能温度控制器
(2)
林海波 , 等 :一种基于增量式数字 P ID 算法的智能温度控制器
87
用 e(k)代替 e(kT ), k 为取样序号 , k =0 , 1 , 2 ,
…。
式中 :e(k)——— 第 k 次取样测得的设定值与反馈值 的定值 ;