角动量和转动动能
匀速圆周运动物理教案:揭示圆周运动中动能和角动量的变化。

引言:在经典力学中,圆周运动是一种常见的运动形式,它不仅在自然界中广泛存在,而且在工业、交通等领域中也有着重要的应用。
匀速圆周运动是圆周运动中最简单的一种,其动能和角动量的变化规律十分有趣,本文将重点分析并揭示这一规律。
一、匀速圆周运动的基本概念和公式匀速圆周运动是指保持恒定角速度的圆周运动,它的基本概念和公式如下:1.概念(1)圆周运动:一个物体沿着一个确定轨迹做圆周运动,称为圆周运动。
(2)角度:以圆心为顶点的两条射线所夹的角度称为圆心角,记为θ(单位为弧度)。
(3)圆周位移:一个物体在圆周上运动一周所经过的路程称为圆周位移,记为L(单位为米)。
(4)角速度:单位时间内圆心角的转动速度称为角速度,记为ω(单位为弧度/秒)。
2.公式(1)角速度的定义式:ω = Δθ / Δt(2)圆周位移的定义式:L = rθ(3)速度的公式:v = ωr(4)周期T的公式:T = 2π / ω(5)向心加速度a的公式:a = v² / r = ω²r二、匀速圆周运动的动能和角动量匀速圆周运动的动能和角动量是随时间而变化的,下面我们分别来分析它们的变化规律。
1.动能的变化规律圆周运动时,一个物体所具有的动能包括轨迹上的动能和转动动能两个部分,其中,轨迹上的动能与物体在圆周上匀速运动的速度有关,而转动动能则与物体沿圆周运动时顺时针方向自转的角速度相联系。
因此,动能的总量为:K = Kt + Kr = 1/2mv² + 1/2Iω²其中,Kt为轨迹上的动能,Kr为转动动能,m为物体的质量,v为其速度,I为物体的转动惯量,ω为其角速度。
由于匀速圆周运动中,物体的角速度和速度保持不变,在考虑一定的时间间隔内动能的变化时,可以得到以下结论:(1)轨迹上的动能Kt不变;(2)转动动能Kr随时间t而增加。
这一结论可以通过下面的分析予以证明。
(1)轨迹上的动能不变圆周运动时,一个物体的速度v为常量,因此,轨迹上的动能很容易计算,为Kt =1/2mv²。
刚体角动量守恒定律

转动动能定理、角动量守恒原理一,转动动能定理:1, 力矩的功设刚体在外力F 作用下发生角位移d φ 由功的定义:相应的元功为:ϕθϕθMd Frd ds F ds F dA o ==-⋅=⋅=sin )90cos(所以力矩的功为:⎰⎰==21ϕϕϕMd dA A2, 转动动能定理设M 为作用刚体上的合外力矩。
将转动定律应用于功的定义中:222121)(0ωωωωϕωϕβϕωωJ J d J d dt d J d J Md A -=====⎰⎰⎰⎰ 所以转动动能定理为:222121ωωϕJ J Md -=⎰ 说明,(1)⎰ϕMd 为合外力矩的功,是过程量221ωJ E K =为刚体在t 时刻的转动动能。
是时刻量。
(2)其中M 、J 、ω必须相对同一惯性系,同一转轴。
【例】:质量为m 长度为l 的匀质细棒,可绕端轴o 在铅垂铅垂面内自由摆动,求细棒自水平位置自由下摆到铅垂位置时的角速度。
解:取细棒为研究对象,视之为刚体。
细棒下摆到 任意θ位置时受外力有:重力mg ,端轴支持力N (对o 不成矩) 。
由功的定义:2cos 2)90sin(2900l mg d l mg d lmg Md o o ===-=⎰⎰⎰θθθθθ由转动动能定理:lgml J l mg 331210212222=∴⎪⎭⎫⎝⎛=-=ωωω二,角动量守恒定律设M 为作用于刚体的合外力矩,由定轴转动定律:dtdLdt J d dt d J J M ====)(ωωβ 所以,刚体定轴角动量定理为00L L dL Mdt LL tt -==⎰⎰特别当整个过程中合外力矩为零时,刚体的角动量守恒。
即刚体定轴转动角动量守恒定律为:常矢==L M 0说明:(1)刚体定轴角动量守恒条件是整个过程中合外力矩为零。
(2)守恒式各量(M 、J 、ω)均需是对同一惯性系中的同一转轴。
(3)⎩⎨⎧==都变,但乘积不变、都不变、ωωωJ J const I L(4)角动量守恒定律也是自然界基本定律之一。
刚体的角动量_转动动能_转动惯量
1. 刚体的角动量
L
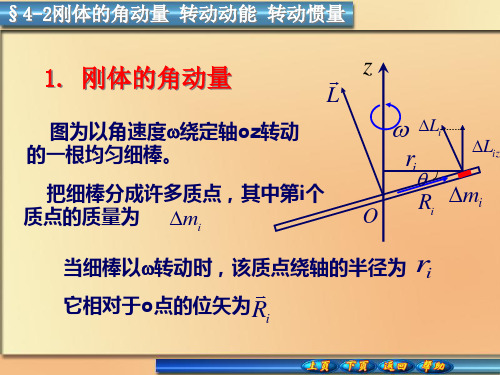
图为以角速度绕定轴oz转动 的一根均匀细棒。
把细棒分成许多质点,其中第i个
质点的质量为 mi
z
Li
ri
Liz
O
Ri mi
当细棒以转动时,该质点绕轴的半径为
ri
它相对于o点的位矢为Ri
刚体的角动量
则 m对i o点的角动量为:
Li
Ri
mivi
就转动规律而言,刚体的质量等价于集中在 离轴距离为rG的圆环上。
解 设圆盘的质量面密度为,在圆盘上取一半径为r、
宽度为dr的圆环(如图),环的面积为2rdr,环的
质量dm= 2rdr 。可得
J
r2dm
R
0
2r
3dr
R4
2
1 mR2 2
转动惯量的计算
回转半径 考虑到刚体的转动惯量与总质量有关,可写为
J miri2 mrG2
i
rG 称为刚体对该定轴的回转半径。
刚体的转动动能应该是组成刚体的各个质点
的动能之设和刚。体中第i个质点的质量
速 度m为i
vi 则该质点的动能为:
刚体做定轴转动时12,各mi质vi2点的角速度相同。
设质点 mi 离轴的垂直距离为 ri ,则它的线速度 vi ri
因此整个刚体的动能
EK
1 2mi
vi2
1 2
miri2 2
刚体的转动动能
式中 是m刚iri体2 对转轴的转动惯量
式写为
EK
1 2
J 2
,所J 以上
上式中的动能是刚体因转动而具有的动能,因
此叫刚体的转动动能。
转动惯量的计算
转动物体的动能与角动量研究

转动物体的动能与角动量研究物体的运动可以分为平动和转动两种形式。
平动是指物体整体平行移动,而转动则是物体绕固定轴线旋转。
在转动过程中,动能和角动量的变化与物体的质量、转动惯量、角速度等参数密切相关。
本文将就转动物体的动能和角动量进行研究。
一、转动物体的动能动能是描述物体运动状态的物理量,对于平动物体来说,动能等于质量乘以速度的平方再除以2,即 K = 1/2 mv^2。
然而,对于转动物体来说,情况略有不同。
首先,我们需要了解转动物体的转动惯量。
转动惯量是一个描述物体对转动运动的惯性的物理量,记作 I。
它依赖于物体的形状和质量分布。
对于直线轴对称的物体,转动惯量可以通过公式 I = mr^2 来计算,其中 m 为物体的质量,r 为参考轴线到质量元的距离。
在转动物体绕某一轴线旋转时,其动能的计算公式为K = 1/2 Iω^2,其中ω 为物体的角速度。
从这个公式可以看出,转动物体的动能与转动惯量和角速度的平方成正比。
转动物体的动能与平动物体的动能有一个非常重要的区别,即转动物体的动能是以转动轴上某一点为参考的。
这一点被称为旋转轴或转轴。
在计算动能时,必须选择一个合适的参考点作为旋转轴,否则将导致计算结果错误。
二、转动物体的角动量角动量是描述转动物体转动状态的物理量,记作 L。
它在数学上等于转动惯量与角速度的乘积,即L = Iω。
类似于动能,角动量也与旋转轴的选择有关,必须选择围绕转轴旋转的参考点作为计算基准。
与动能不同,角动量的大小和方向都是有意义的。
角动量的大小与物体质量、转动惯量和角速度的乘积有关。
当物体的转轴随着时间变化时,角动量的大小保持不变,这就是角动量守恒定律的内容之一。
在对转动物体的角动量进行研究时,有一个重要的概念需要引入,即转动惯量矢量。
转动惯量矢量是一个描述转动物体转动惯量随转轴变化的物理量,记作I⃗。
转动惯量矢量的方向与转轴方向相同,并且其大小等于转动物体绕该转轴的转动惯量。
利用转动惯量矢量,可以方便地计算转动物体的角动量。
物理刚体运动
角位移
角速度
d dt
角加速度 d
dt
4.角速度矢量
ω
角速度的方向:与刚体 转动方向呈右手螺旋关系。
在定轴转动中,角速度 的方向沿转轴方向。
角速度矢量
例1:一飞轮转速n=1500r/min,受制动后均匀减速, 经t=50 s后静止。(1)求角加速度α和飞轮从制动开 始到静止所转转数N;(2)求制动开始后t=25s 时飞 轮的速度 ;(3)设飞轮的半径r=1m,求在t=25s 时边缘上一点的速度和加速度。
刚体对 o 点的角动量,等于各个质点角动量的
矢量和。
对于定轴转动,我们感兴趣的只是 L 对沿 Oz 轴的分量 Lz,叫做刚体绕定轴转动的角动量。
而这个分量Lz 实际上就是各质点的角动量沿 Oz 轴的分量 Li z 之和。
从图中可以看出: Lix Li cos
因此
Lz Li cos mi Rivi cos
r
m2
m1
1 2
m
r
当不计滑轮质量及摩擦阻力矩即令m=0、M=0
时,有
T1
T2
2m1m2 m2 m1
g
a m2 m1 g m2 m1
上题中的装置叫阿特伍德机,是一种可用来测 量重力加速度g的简单装置。因为在已知m1、 m2 、 r和J的情况下,能通过实验测出物体1和2的加速度 a,再通过加速度把g算出来。在实验中可使两物体 的m1和m2相近,从而使它们的加速度a和速度v都 较小,这样就能角精确地测出a来。
刚体运动时,如果刚体的各个质点在运动中 都绕同一直线圆周运动,这种运动就叫做转动, 这一直线就叫做转轴。
9-刚体定轴转动的角动量定理 角动量守恒定律 刚体定轴转动的动能定理
内转动物体角动量的增量,称为角动量定理。 讨论:(1)冲量矩是力对时间的累积,其效果是引起动量矩的改变。 (2)角动量定理对 J 不变或变均适用。 三、角动量守恒定律(动量矩守恒) 由角动量定理可知,如果物体所受对某固定轴的合外力矩
dL d ( J ) 0 ,所以 L J 恒量 dt dt
2). 质点的动能定理: 合外力对质点所做的功等于动能的增量, 那么刚体转动动能 的改变是不是也是由于力做功导致的?(学生应该会提出是力矩做功的原因, 那么 点明:其实力矩功并不是新的功,只是力的功的另一种表达方式,为什么这样说, 我们从力做功去推导力矩做功看一下)。
一、力矩的功(推导): A dA Md
5
于相应的力矩与角位移元的乘积,称为力矩的功。
1 1 1 二、转动动能: Ek mi ri 2 2 ( mi ri 2 ) 2 J 2 2 2 2
转动动能不是一种新的动能是动能的另一种表达方式。
10 分钟
过渡:那么现在我们知道了对于刚体的定轴转动,力矩做的功,以及刚体的转动 动能,那么应该可以知道刚体定轴转动的动能定理了。
二、 角动量定理(动量矩定理) (1) 冲量矩:与冲量相似,表示力矩在一段时间内的累计效应,等于力矩乘以力矩所作用的 时间。 (2) 定理:刚体作定轴转动时,根据转动定律得出 Mdt
10 分钟
d ( J ) ,对其两边积分,得:
t
t0
Mdt d ( J) J J0 ;转动物体所受合外力矩的冲量等于在这段时间
1 J 常量 2
在只有保守力矩做功的情况下,系统的转动动能和势能相互转化,而总的机械能 保持不变,这就是刚体定轴转动的机械能守恒定律。
大学物理4-2刚体的角动量 转动动能 转动惯量
刚体绕定轴的角动量表达式:
Lz J
刚体的转动动能
2. 刚体的转动动能
刚体的转动动能应该是组成刚体的各个质点
的动能之设和刚。体中第i个质点的质量为 , mi
速度为 v,i 则该质点的动能为:
1 2
mivi2
刚体做定轴转动时,各质点的角速度相同。
设质点
mi
离轴的垂直距离为
vi ri
ri ,则它的线速度
因此整个刚体的动能
EK
12mivi2
1 2
ri2mi 2
刚体的转动动能
式中 式写为
是m刚iri体2 对转轴的转动惯量
EK
1 2
J 2
,所J以上
上式中的动能是刚体因转动而具有的动能,因 此叫刚体的转动动能。
转动惯量的计算
3. 转动惯量的计算
按转动惯量的定义: J ri2mi
刚体的质量可认为是连续分布的,所以上式可 写成积分形式
J r2dm 要求: 细棒、薄圆盘、圆环
dl 其中质元dm可表示为 dm ds
dv
r —为质元到转轴的距离
转动惯量的计算
刚体运动:
平动: 平动动能 1 mv2 线动量 mv
2
定轴转动:转动动能 1 J 2 角动量 J
2
质量是刚体平动时惯性大小的量度。 转动惯量是刚体转动时惯性大小的量度。 补:平行轴定理、垂直轴定理(适用于薄平面刚体)。
Li Ri pi Ri mivi
因 vi Ri ,所以 L的i 大小为
Li mi Rivi
方向如图所示。
z
L
Li Liz
ri
O Ri mi
刚体的角动量
6.1 刚体运动学(大学物理)
1、转动惯量
刚体转动时,刚 体内的各质点作圆周 运动,刚体的动能等 于各质点动能之和。
mn
m1
rn
r1
r2 m2
1 1 1 2 2 2 Ek m1v1 m2v2 mnvn 2 2 2 n n 1 1 2 2 mivi mi (ri ) i 1 2 i 1 2 1 n 2 2 ( miri ) 2 i 1
1 l 1 2 2 J ml m ml 结果与前相同。 3 12 2
t
0
1 2 0 0 t t 2
v v 2a( x x0 )
2 2 0
2 ( )
2 2 0 0
匀变速转动
六 角量与线量之间的关系
1、位移与角位移之间的关系 刚体转过 刚体上的一点 位移 s
o
r
s
x
s r
第六章 刚体力学
本章主要内容:
6-1 刚体的运动 6-2 刚体的角动量、转动动能、转动惯量
6-3 力矩
刚体定轴转动定律
6-4 定轴转动的动能定理 6-5 刚体对定轴的角动量守恒定律
6-6 进动*
本章学习要求
2.理解转动惯量、力矩的概念,掌握转动定律。 3.掌握刚体转动的动能定理、角动量定理。
1.掌握刚体定轴转动的特点,理解角坐标、角位移 角速度、角加速度的概念。
1 n 刚体的转动动能 Ek ( miri2 ) 2 2 i 1 1 2 与平动动能比较 Ek mv 2 n 2 miri :相对于转轴的特征的物理量
i 1
转动惯量的定义:
单位:kg ·m2
J m r
i 1
大学物理力学第五章2刚体功和能、角动量
J12
Ek 2
Ek1
A Ek2 Ek1
M、ω1、 ω2是对于同一转轴的!
4、刚体对地面的重力势能:
Ep
mi ghi g
mi hi
Δmi C×
质心高度:
hc
mi hi m
EP mghC
hC
hi
Ep= 0 视为质量集中到质心上
5. 机械能守恒
Aex Ain,nco 0
E E0
M rmg sin rmg R L sin L
Ωdt
Mdt
R
L
θ
Ω 1
摩擦 倒下
Jω
o mg
1、已知m1,m2 ,M1,M2,R1,R2 且m1> m2 试由牛顿运动
定律和转动定律写出系统的运动方程,求m2 的加速度和
张力T1 ,T2 , T3 。 解:设m2的加速度大小为a,方向向上,
M
l / 2 l / 2
dM
20l /2 gxdx
1 mgl
4
始末两态的角动量为: L0 J 0 , L 0
由角动量定理:
t
t0
Mdt L L0
0t
1 mgldt
4
0 J 0
1 mglt
4
1 12
ml
20
0 m ,l o dm l / 2
t l0 3 g
l/2
x dx x
当系统中只有保守力作功,其它力与力矩不 作功时,物体系的机械能守恒。
例1:一均匀细杆质量为m,长度为l,一端固定在
光滑水平轴上,由静止从水平位置摆下,求细杆摆
到铅直位置时的角速度。 棒上重力矩之和等于全部重
解(一):应用动能定理 力集中于质心对轴的力矩
5-2转动惯量、功、能、角动量
J r dm
2
dm—质元的质量
r—质元到转轴的距离
例5.2求质量为m,半径为R的均匀薄圆环的转动 惯量。轴与圆环平面垂直并通过其圆心。
解: m
●
取小质元dm如图
dm
o R
环上各质元到轴的垂直距离 都等于R
J r dm R dm
2 2
mR
对同一转轴转动惯量J具有可叠加性
2
dA Md
A Md
1
d d J d Jd Jd dt dt
合外力矩对刚体所作的总功为:
2
1 2 猜一猜 J 的物理属性是什么? 2
设刚体中第i个质点的质量为Δ mi,速度为vi 则该质点的动能为:
2
1
1 1 2 2 Jd J 2 J1 2 2
Mdt d ( J )
两边积分得:
M d t J J
t0
t
0Байду номын сангаас
——定轴的角动量定理的积分形式
t
t0
M d t 表示力矩对时间的积累。
称为力矩 M 的角冲量。
定轴转动物体所受外力矩的角冲量,等于物 体对轴的角动量的增量。
由几个物体组成的系统, 每个物体对转轴的角动量
Li J ii
1、定轴转动刚体的角动量定理
d d J dL M J dt dt dt
——刚体定轴转动角动量定理微分形式
刚体对定轴的角动量为
L J
刚体在外力矩作用下, 经 Δt=t-t0 的时间间隔 角动量由 L0 J 0
L J
得
d dL J 由 M dt dt
L2
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
ˆ(t ) r rr
v ˆ dr ˆ dr drr dr d ˆ ˆr ˆr r r dt dt dt dt dt dr ˆ ˆ r r dt
以天之语,解物之道 李政道
曰遂古之初,谁传道之? 上下未形,何由考之? 冥昭瞢闇,谁能极之? 冯翼惟像,何以识之? 明明闇闇,惟时何为? 阴阳三合,何本何化? 圜则九重,孰营度之? /view/69838.htm 惟兹何功,孰初作之? 斡维焉系,天极焉加?
ˆ (axbz az bx ) y ˆ (axby a y bx ) z ˆ (a y bz az by ) x
注意:
a b=-b a
角动量和万有引力
单质点的角动量定义:
角动量
l rp
角动量 质点坐标 质点动量
角动量随时间的变化
dl d (r p ) dt dt dr dp pr dt dt v mv r F r F
利用角动量守恒有,
bmv0 dmv
极坐标系中的角动量计算
ˆ dr ˆ dr drr dr d ˆ ˆ ˆ v rr rr dt dt dt dt dt dr ˆ ˆ r r dt
l r mv ˆ r ˆ) r m(rr ˆ ˆ) mr (r
2 2 ( R ) gT r月 3 地球 2 4 5 R地球 6400km, T =27.3215天,r月=3.84 10 km
行星绕日轨道轨道
以太阳为坐标原点,建立极坐标系。 行星受到太阳的万有引力 Mm ˆ F G 2 r r 行星受到的力矩 Mm ˆ l r F r G 2 r 0 r 因此角速度守恒。 此外万有引力是保守力,因此行星的机械能守恒。 Mm 行星势能V (r) G r
解:
由于alpha粒子比原子核轻很多, 我们可以近似认为原子核不动。 以原子核为原点建立直角坐标系。如图所示, X轴沿入射方向。Z方向垂直于纸面向外,未画。 Alpha粒子只是受到原子核产生的库仑力,
2 Ze 2 ˆ。 F 2 r r
解:
2 Ze 2 ˆ。 F 2 r r
库仑力是保守力,因此alpha粒子的机械能量守恒。即,
1.所有行星都沿着椭圆轨道运行, 太阳则位于这些椭圆的一个焦点上。
开 (轨道定律) 普 2。任何行星到太阳的连线在相同的时间内 勒 三 扫过相同的面积。(面积定律) 定 3.任何行星绕太阳运动的周期的平方与该行星 律
的椭圆轨道的半长轴的立方成正比。 (周期定律)
牛顿万有引力定律的由来
圆是椭圆一种特殊情况,当长轴和短轴接近时, 用圆近似椭圆。设圆半径为r 根据周期定律,T ~ r 3/ 2 做圆周运动时,加速度 ˆ (2) r ˆ= r ˆ~ 2 a = r r r 2 T r 因此猜测 149,597,887.5 km 地球远日点 ˆ r 149,576,999.826 km 地球近日点 F km 2 r
矢量的直积
向量的直积
ˆ a b=|a||b|sin ( ) n 这里是两个矢量的夹角, ˆ 是垂直于a,b平面的单位矢量, n ˆ 且a,,满足右手关系。 b n
物b=-b a
向量的直积
ˆ a b=|a||b|sin ( ) n
在直角坐标系下直积的运算
ˆ x ˆ0 x ˆ y ˆ 0 y ˆ z ˆ0 z
ˆ y ˆz ˆ x ˆz ˆ ˆx y ˆy ˆ ˆ x z
ˆ y ˆ x ˆ z
注意:
a b=-b a
向量的直积
a b ˆ x ax bx ay by ˆ y ay by az bz ˆ z az bz ˆ x ax bx az bz ˆ y ax bx ay by ˆ z
1 2 2Ze2 1 2 mv + mv0 2 4 0 d 2
此外,
2Ze2 ˆ 0, r F r 2 r r
因此Alpha粒子的角动量守恒。
初始角动量
ˆ by ˆ ) mv0 x ˆ bmv0 z ˆ l0 ( x0 x
在转折点角动量
l ˆ cos( ) y ˆ ) mv(cos( ) x ˆ sin( ) y ˆ) d (sin( ) x ˆ dmvz
2 2
牛顿万有引力定律的由来
ˆ r F km 2 r 由于物体间力的作用是相互的 ˆ r F GMm 2 。 r 由于观察的天体运动具有普遍现象, 因此猜测该力是 万有的、普适的、统一的。
大胆假设,小心求证
计算月地距离
M 地 M 月 M 月 2 M 月 2 r月 2 F地月 G v月 ( ) 2 r月 r月 r月 T F地物 M 地m G mg 2 R地球
定义质点的力矩
r F
质点力矩和角动量关系
dl dt
冲量距和角动量守恒
dl dt
当 0, l =l 0, 角动量守恒。
当 在某个方向等于零, 则l 在该方向的分量守恒。
用一个带2e正电荷的阿尔法粒子 轰击一个带Ze正电荷的原子核。 由于阿尔法粒子和原子核同带正电荷, 阿尔法粒子会被偏转。计算阿尔法粒子刚好被 偏转时阿尔法粒子离原子核的距离d。 设入射粒子初速度为v0,瞄准距离为b。
2
ˆ ˆ) l mr (r
2
| l | mr
2
2 | l | / m是掠面速度。
极坐标系中的动能计算
m 2 m Ek v v v 2 2 m dr dr ˆ ˆ) ˆ r ) ( r ˆ r ( r 2 dt dt m dr dr dr ˆ ˆ r ˆ r ˆ r [ r 2 dt dt dt dr ˆ ˆ r ˆ] ˆ r r r dt m 2 2 2 (vr r ) 2