转子动平衡实验报告格式
转子动平衡实验报告格式
实用文档
转子动平衡实验报告
一﹑实验目的
1. 巩固转子动平衡知识,加深转子动平衡概念的理解;
2. 掌握刚性转子动平衡实验的原理及基本方法。
3.了解动平衡试验机的组成﹑工作原理,通过参数化和可视化的方法,观察转子动平衡虚拟实验的平衡效果。
二﹑实验设备及工具
DPH—I型智能动平衡机、测试系统由计算机,数据采集器﹑高灵敏度有源压电传感器和光电相位传感器等组成。
三、试验记录及结果
实用文档
四、思考题
1.转子(试件)在什么情况下作静平衡?什么情况下作动平衡?
2.作往复移动或平面运动的构件,能否用动平衡试验机将其不平衡惯性力平衡?为什么?
五、收获和体会。
转子动平衡实验报告

148
0.29
五思考题
1 转子(试件)在什么情况下作静平衡?什么情况下作动平衡?
答:(1)静平衡:在转子一个校正面上进行校正平衡,校正后的剩余不平衡量,以保证转子在静态时是在许用不平衡量的规定范围内,为静平衡又称单面平衡。
(2)动平衡:在转子两个校正面上同时进行校正平衡,校正后的剩余不平衡,以保证转子动态时是在许用不平衡量的规定的范围内,为动平衡又称双面平衡。
二实验设备及工具
DPH-I型智能平衡机构,测试系统由计算机,数据采集器,高灵敏度有电力传感器和光电相位传感器等组成。
三 动平衡实验截图
动平衡测试系统
采集数据分析窗口
四实验记录及结果
次
数
左边
右边
角度
克数(g)
角度
克数(g)
1
6
1.12
2
0.99
2
148
0.48
193
0.33
3
247
0.4
214
0.38
六收获和体会
答:通过转子动平衡实验,我们更加了解到了怎样消除惯性力对机构的不利影响:噪音,震动等,对于不同的试件,我们通常根据试件的直径D与两校正面的距离b:
(1)D/b≥5时,试件只需满足静平衡,相反,就必须作动平衡。
(2)然而据使用要求,只要满足转子平衡后用途要求的前提下,能做静平衡的,就不要做动平衡,能做动平衡的,就不要作静平衡。因为静平衡比动平衡更容易,省工,省力,省时间,省费用。
转子动平衡实验报告
班级学号
11010431
姓名
王凯
实验日期
2013.4.16
同 组 人
指导教师
成绩
一实验目的
带传动-刚性转子动平衡实验报告

带传动-刚性转子动平衡实验报告
实验目的:
1. 学习带传动轴系的刚度分析和动平衡方法,了解带传动轴系的动力特性。
2. 学习刚性转子的动平衡方法,掌握动平衡实验的基本操作技能。
3. 掌握利用矢量和相位检测法进行自行检验的方法。
实验仪器:
1. 带传动轴系、刚性转子动平衡实验装置
2. 震动传感器、信号放大器、矢量和相位检测仪
3. 电子数字秤
实验步骤:
1. 用电子数字秤校正刚性转子上的试重质量,并在刚性转子上安装试重。
2. 将带传动轴系和刚性转子安装到实验装置上,并连接震动传感器。
3. 启动实验装置,记录实验数据。
记录包括震动传感器探头的
输出电压值、带传动轴系中心轴的旋转速度、电源电压等数据。
4. 在不同转速下重复步骤3,直至所有转速的实验数据都被记录。
5. 利用所记录的数据进行数据处理,根据动平衡理论计算出刚性转子的偏心量、倾角和校正质量。
6. 利用矢量和相位检测法对刚性转子进行自行检验,确认实验结果的准确性。
实验结果:
根据实验数据和动平衡理论计算得到,刚性转子的偏心量为
0.02mm,倾角为0.01°。
校正质量为0.03g。
利用矢量和相位检测法进行自行检验,结果表明实验结果的误差较小,证明实验结果的准确性。
结论:
本次实验成功地利用带传动轴系和刚性转子动平衡实验装置进行了刚性转子的动平衡实验,并采用矢量和相位检测法进行了自行检验,得到了准确的实验结果。
实验过程中,需要仔细操作,准确记录数据,严格按照实验步骤操作,才能得到可靠的实验结果。
机械转子动平衡实验报告

机械转子动平衡实验报告机械转子动平衡实验报告摘要:本次机械转子动平衡实验重点研究了转子的动平衡方法,根据实验结果分析了转子失衡产生的原因以及动平衡过程中需要注意的事项。
通过实验验证了动平衡技术可有效避免机械转子在旋转过程中产生的不稳定现象,从而确保机械设备的正常使用。
实验组成:机械转子动平衡实验设备由平衡机、控制系统、机械转子以及数据采集系统组成。
机械转子由转子轴和转子叶片组成,转子轴通过轴承支撑,转子叶片由螺栓紧固在转子轴上。
平衡机通过气垫和电机组成一个平衡导轮系统,以控制转子的旋转速度,同时可以通过测得的振动信号来计算出转子的质量偏离量,从而调整转子的质量平衡状态。
实验原理:机械转子的动平衡是指在机械设备运行过程中,通过对转子进行平衡调整,消除质量偏离的现象,达到转子的质量平衡状态。
当机械转子失衡时,会产生较大的振动和噪声,从而影响机械设备的正常运行,甚至可能会导致机械故障。
因此,在机械设备的制造和维修过程中,动平衡技术是一项非常重要的工艺。
机械转子的动平衡过程是通过平衡工具、控制系统和数据采集系统三个主要组成部分实现的。
平衡工具通常是由平衡机和支撑转子的轴承组成的。
通过调整平衡导轮的位置和电机的转速,对旋转的转子进行动态平衡调整,消除质量偏离现象。
控制系统负责控制平衡工具的旋转速度和方向,并实时采集转子振动的数据,并将其传递给数据采集系统进行处理。
数据采集系统通过处理振动数据,计算出转子的质量偏离量,并输出调整质量平衡所需的数据。
实验过程:1.将机械转子安装在平衡工具上,并通过支撑轴承进行固定,启动平衡机。
2.调整平衡导轮位置和电机转速,使机械转子保持旋转平衡,并记录下转速和旋转方向。
3.开始采集转子振动信号,并将其传递给数据采集系统进行处理。
4.根据振动数据,计算出转子的质量偏离量,并输出质量平衡调整所需的数据。
5.根据计算结果,调整机械转子上的质量偏离部分,使转子达到质量平衡状态,在不影响其旋转平衡的前提下尽可能消除质量偏离现象。
刚性转子动平衡实验报告
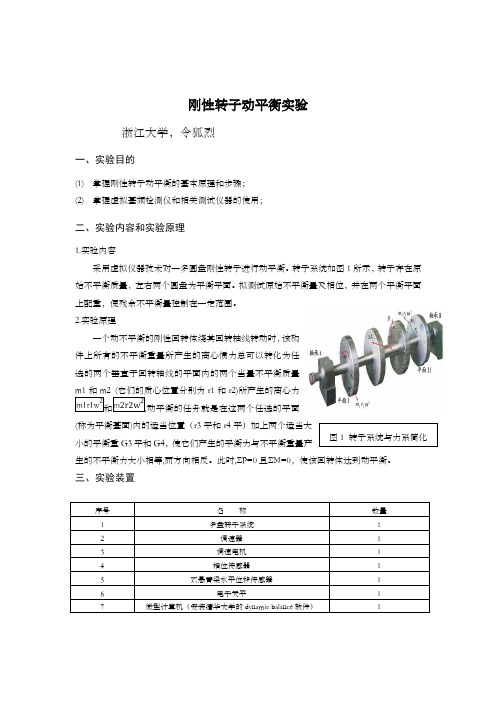
图 1 转子系统与力系简化刚性转子动平衡实验浙江大学,令狐烈一、实验目的(1) 掌握刚性转子动平衡的基本原理和步骤; (2) 掌握虚拟基频检测仪和相关测试仪器的使用;二、实验内容和实验原理1.实验内容采用虚拟仪器技术对一多圆盘刚性转子进行动平衡。
转子系统如图1所示,转子存在原始不平衡质量,左右两个圆盘为平衡平面。
拟测试原始不平衡量及相位,并在两个平衡平面上配重,便残余不平衡量控制在一定范围。
2.实验原理一个动不平衡的刚性回转体绕其回转轴线转动时,该构件上所有的不平衡重量所产生的离心惯力总可以转化为任选的两个垂直于回转轴线的平面内的两个当量不平衡质量r1和r2)所产生的离心力和动平衡的任务就是在这两个任选的平面(称为平衡基面)内的适当位置(r3平和r4平)加上两个适当大小的平衡重G3平和G4,使它们产生的平衡力与不平衡重量产生的不平衡力大小相等,而方向相反。
此时,ΣP=0且ΣM=0,使该回转体达到动平衡。
三、实验装置 序号 名 称 数量 1 多盘转子系统1 2 调速器 1 3 调速电机 1 4 相位传感器 1 5 双悬臂梁水平位移传感器1 6 电子天平1 7微型计算机(安装清华大学的dynamic balance 软件)1四、实验步骤1. 虚拟仪器接线进入“刚性转子动平衡”程序,点击“设备模拟连接”图标,按图3示用鼠标左键连接虚拟测试仪器,如连线错误,用鼠标左键单击“重新连接”按钮。
确认无误后,用鼠标左键单击“连接完毕”按钮,如果出现“连接错误”的提示,则连接有错,需要按“确定”,再按“重新连接”。
如果出现“连接正确”的提示,按“确定”后,可获得与图4相同的虚拟动平衡仪应用程序界面。
2. 原始不平衡量测试(1) 将转速控制器转速b n 设定为1200r/min ,启动转子2至3分钟使转速保持稳定。
(2) 点击“基频检测”图标,进入图4的状态下,用鼠标左键按下左上角按钮“开始”启动虚拟动平衡仪,点击“A 通道”、“B 通道”进行通道切换。
刚性转子动平衡实验实验报告

实验刚性转子动平衡实验任务书一、 实验目的:1. 掌握刚性转子动平衡的基本原理和步骤;2. 掌握虚拟基频检测仪和相关测试仪器的使用;3. 了解动静法的工程应用。
二、 实验内容采用两平面影响系数法对一多圆盘刚性转子进行动平衡三、 实验原理工作转速低于最低阶临界转速的转子称为刚性转子,反之称为柔性转子。
本实验采取一种刚性转子动平衡常用的方法—两平面影响系数法。
该方法可以不使用专用平衡机,只要求一般的振动测量,适合在转子工作现场进行平衡作业。
根据理论力学的动静法原理,一匀速旋转的长转子,其连续分布的离心惯性力系,可向质心C 简化为过质心的一个力R (大小和方向同力系的主向量∑=iSR )和一个力偶M (等于力系对质心C 的主矩()∑==cicmS m M )。
如果转子的质心在转轴上且转轴恰好是转子的惯性主轴,即转轴是转子的中心惯性主轴,则力R 和力偶矩M 的值均为零。
这种情况称转子是平衡的;反之,不满足上述条件的转子是不平衡的。
不平衡转子的轴与轴承之间产生交变的作用力和反作用力,可引起轴承座和转轴本身的强烈振动,从而影响机器的工作性能和工作寿命。
刚性转子动平衡的目标是使离心惯性力系的主向量和主矩的值同时趋近于零。
为此,先在转子上任意选定两个截面I 、II (称校正平面),在离轴线一定距离r 1、r 2(称校正半径),与转子上某一参考标记成夹角θ1、θ2处,分别附加一块质量为m 1、m 2的重块(称校正质量)。
如能使两质量m 1和m 2的离心惯性力(其大小分别为m 1r 1ω2和m 2r 2ω2,ω为转动角速度)正好与原不平衡转子的离心惯性力系相平衡,那么就实现了刚性转子的动平衡。
两平面影响系数法的过程如下:(1)在额定的工作转速或任选的平衡转速下,检测原始不平衡引起的轴承或轴颈A 、B 在某方位的振动量11010V ψ∠=V 和22020V ψ∠=V ,其中V 10和V 20是振动位移(也可以是速度或加速度)的幅值,ψ1和ψ2是振动信号对于转子上参考标记有关的参考脉冲的相位角。
动平衡测定实验报告
动平衡测定实验报告引言动平衡是一种常用的工程实践技术,主要用于修复旋转机械设备中的不平衡问题。
不平衡是指转子轴线与转动中心不重合,导致旋转机械在高速运转时会产生振动和噪音。
因此,动平衡测定是非常重要的,可以保证机械设备的正常运行和延长使用寿命。
本实验旨在了解动平衡测试的原理和方法,并通过实验测定一个简单系统的动平衡。
实验中,我们将学习如何使用动平衡仪测量转子的不平衡量,并采取适当措施去除不平衡。
实验过程1. 准备工作:准备一台动平衡仪,确保仪器工作正常;清洁转子,确保无脏物和杂质。
2. 安装:将转子安装到动平衡仪上,将传感器安装在平衡仪上的适当位置。
3. 初始测试:开启动平衡仪,进行初始测试。
记录下转子在不同位置的不平衡量。
4. 不平衡量测定:根据初始测试的结果,调整转子的位置,多次进行测定,直到找到转子的最佳位置。
5. 不平衡修复:根据测定结果,决定施加适当的修复方法。
可以在转子上添加配重物,也可以通过修改转子的结构来实现修复。
6. 修复测试:修复后,再次进行测试,检查修复效果。
7. 完成:记录实验结果,并将仪器归还至指定位置,清理实验台。
实验结果与讨论在实验中,我们测定了一个转子的不平衡量,并进行了修复。
最终,我们成功将不平衡量降低到了可接受的范围内。
实验结果表明,转子在不同位置的不平衡量差异较大。
通过不断调整转子的位置,我们找到了一个相对较佳的位置,减小了不平衡量。
在修复过程中,我们选择了在转子上添加配重物的方法。
通过精确地计算和安装配重物,成功降低了转子的不平衡量。
不确定度分析在实验中,我们也要对测定结果的不确定度进行分析。
不确定度的来源主要有以下几个方面:1. 仪器误差:动平衡仪的准确度会对测定结果产生误差。
2. 操作误差:操作人员在安装、调整和修复过程中可能存在误差。
3. 环境误差:实验环境的影响也会对结果产生误差。
为了减小不确定度,我们应该采取以下措施:1. 确保仪器的准确度,并进行定期校准。
转子动平衡实验实验报告
转子动平衡实验实验报告转子动平衡实验实验报告一、引言转子动平衡是机械工程中非常重要的一项技术,它对于提高机械设备的运行效率、延长设备寿命以及减少噪音和振动都具有重要意义。
本实验旨在通过转子动平衡实验,探究转子不平衡对机械设备的影响以及如何进行动平衡调整。
二、实验目的1. 了解转子动平衡的原理和方法。
2. 学习使用动平衡仪器进行转子动平衡实验。
3. 掌握动平衡调整的技巧和方法。
三、实验装置和方法1. 实验装置:转子动平衡试验台、电动机、动平衡仪器等。
2. 实验步骤:a. 将待测试的转子安装在转子动平衡试验台上。
b. 连接动平衡仪器,并进行校准。
c. 启动电动机,观察转子的振动情况,并记录数据。
d. 根据动平衡仪器的指示,进行动平衡调整。
e. 重复步骤c和d,直到转子的振动降至合理范围。
四、实验结果与分析在实验过程中,我们测试了不同转子在不同转速下的振动情况,并进行了动平衡调整。
通过实验数据的记录和分析,我们得出以下结论:1. 转子不平衡会导致机械设备的振动增加。
在实验过程中,我们发现当转子存在不平衡时,其振动幅度明显大于平衡后的转子。
这种振动不仅会影响设备的正常运行,还会加速设备的磨损和损坏。
2. 动平衡调整可以有效减少转子的振动。
通过实验,我们发现使用动平衡仪器对转子进行调整后,转子的振动幅度明显减小,达到了较为理想的状态。
这表明动平衡调整是一种有效的方法,可以降低机械设备的振动水平。
3. 动平衡调整需要耐心和技巧。
在实验过程中,我们发现动平衡调整并不是一次性完成的,而是需要多次尝试和调整。
调整时需要根据动平衡仪器的指示,逐步调整转子的平衡状态,直到达到较为理想的结果。
这需要操作者具备一定的耐心和技巧。
五、实验总结通过本次转子动平衡实验,我们深入了解了转子动平衡的原理和方法,学习并掌握了动平衡仪器的使用技巧。
我们发现转子不平衡会对机械设备的振动和运行产生负面影响,而动平衡调整是一种有效的方法来降低振动水平。
刚性转子动平衡实验报告
刚性转子动平衡实验报告刚性转子动平衡实验报告引言刚性转子动平衡是机械工程中一个重要的研究领域,它涉及到机械系统的稳定性、振动和噪音控制等问题。
本文将介绍一项关于刚性转子动平衡的实验,并对实验结果进行分析和讨论。
实验目的本次实验的目的是通过对刚性转子进行动平衡实验,探究转子的不平衡量对系统振动的影响,并寻找合适的平衡方法,以提高系统的稳定性和运行效果。
实验装置实验装置包括一台转子平衡机、传感器、数据采集系统等。
转子平衡机通过电机驱动转子旋转,传感器用于检测转子的振动信号,数据采集系统用于记录和分析实验数据。
实验步骤1. 将转子安装在转子平衡机上,并确保转子能够自由旋转。
2. 启动转子平衡机,使转子开始旋转。
3. 通过传感器采集转子的振动信号,并将数据传输至数据采集系统。
4. 对采集到的数据进行分析和处理,计算出转子的不平衡量。
5. 根据不平衡量的大小和位置,选择合适的平衡方法进行调整。
6. 重复以上步骤,直至转子的振动达到要求的范围。
实验结果与分析通过实验,我们得到了转子的振动数据,并计算出了转子的不平衡量。
根据实验数据,我们可以发现转子的不平衡量与振动幅值之间存在着明显的关系。
当不平衡量较大时,转子的振动幅值也较大;而当不平衡量较小时,转子的振动幅值较小。
为了减小转子的振动幅值,我们采用了两种常见的平衡方法:静平衡和动平衡。
静平衡是通过在转子上加上适当的质量块,使得转子在静止状态下达到平衡。
通过实验,我们发现静平衡对于较小的不平衡量效果较好,可以有效地降低转子的振动幅值。
然而,对于较大的不平衡量,静平衡的效果较差,需要采用其他平衡方法。
动平衡是在转子旋转的过程中,通过在转子上加上适当的质量块,使得转子在运行状态下达到平衡。
通过实验,我们发现动平衡对于较大的不平衡量效果较好,可以显著地降低转子的振动幅值。
然而,对于较小的不平衡量,动平衡的效果较差,可能会引入额外的不平衡。
结论通过本次实验,我们对刚性转子动平衡有了更深入的了解。
实验三 转子动平衡实验
实验三转子动平衡实验一、实验目的1.巩固所学的理论知识;2.了解动平衡机的工作原理及进行转子动平衡的基本方法。
二、实验设备1.RYS-100B闪光式动平衡机。
2.试验转子、称重天平、贴重蜡等。
三、动平衡机原理和平衡方法简介平衡转子的方法,随所用动平衡机而定,动平衡机的类型很多,这里介绍和采用的是RYS-100B型闪光式动平衡机,其主要参数如下:平衡转子重量范围 5~100kg平衡转子重量直径(max)φ650mm平衡转子重量轴径(max)φ80mm平衡转速 1700~2700r/min最小平衡检测量<0.5μm仪表灵敏度>0.2μm/格相对误差±15°平衡机主要有左右摇摆架、传感器、闪光灯、传动系统、电器测试系统等部分组成。
其电测原理方框图如下所示:传动部分主要由底座、电机、皮带轮、惰轮、传动带拉紧杆等构件组成(参照实物)。
对于不同长度的试件,可移动传动架和电机底座,以使试件和皮带传动系统处于正确位置上。
必要时,可调设备用皮带轮和传动带,以适应不同试件所需要的平衡转速。
停车时,采用电动机反向制动。
传感器采用的是磁电式惯性传感器,两只传感器分别安装在左、右两个摇架上。
传感器主要由磁钢、线圈、弹簧片、只架和壳体等组成。
四块V形永久磁钢组成一个空间磁场,由弹簧片悬挂的两只串联线圈安装在这个空间内磁场中,由摇架的摆动使传感器的线圈的磁钢作相对的往复运动,线圈切割磁力线产生正弦交变玷市电势。
该电信号输送至电测箱(平衡仪),用作测量的重径积(不平衡重量和所在半径的乘积)。
另外一路信号通过电路转换来触发闪光灯,其在摇摆架与振幅为最大瞬时使。
由于闪光灯闪亮频率与摇摆架的振动频率(即转子的旋转速度)相同。
因此,闪光灯每次闪亮时,转子轴均旋转到同一位置。
为了确定在闪光灯闪亮时轴的周向位置,在轴的端面上用粉笔划上标记,在闪光灯的照射下,便可看到不动的标记,从而使我们可以确箱上设置有轻、重位置转换开关,以便根据需要显示轻、重点位置。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
转子动平衡实验报告
一﹑实验目的
1. 巩固转子动平衡知识,加深转子动平衡概念的理解;
2. 掌握刚性转子动平衡实验的原理及基本方法。
3.了解动平衡试验机的组成﹑工作原理,通过参数化和可视化的方法,观察转子动平衡虚拟实验的平衡效果。
二﹑实验设备及工具
DPH—I型智能动平衡机、测试系统由计算机,数据采集器﹑高灵敏度有源压电传感器和光电相位传感器等组成。
三、试验记录及结果
四、思考题
1.转子(试件)在什么情况下作静平衡?什么情况下作动平衡?
2.作往复移动或平面运动的构件,能否用动平衡试验机将其不平衡惯性力平衡?为什么?
五、收获和体会。