《现代控制理论》第三版第二章.习题答案
《现代控制理论》第三版 第二章.习题答案

2-7. 证明 2-3 中,状态方程的解: 1. 即当u(t ) K (t ),x(0 ) x0时
x(t ) e At x0 e At BK , 式中K 与u(t )同维的常数矢量。
x e x0 e A( t ) BK ( )d
At 0 t
e x0 e A( t ) ( )d BK
得 1 0; 2 1.
1 0 据 1 I A P P 1 1 0 1 0
得到 P 1 0 1 ;
T
0 0 P2 0 得 到 根 据 2 I A P2 1 1
1 0 1 1 1 于是T , P2 , T 1 1 1 1 于是 T 1 0 e 1 G (T ) e AT T T T T e 1 0 e t T T e 0 K At H (T ) e dtB dt 0 0 1 et 1 0 1 0
1
e At 0 (t ) I 1 (t ) A
1 2cos 2t 2 4sin 2t
sin 2t 2cos 2t
1 1 (2) A 4 1
1 22 1 33 A t A t 2! 3! 直接法: 7 3 t 2 13 3 2 1 5 , t t t t t 2! 6 6 2 28 3 t 13 3 2 4 4 , 1 5 t t t t t 6 2! 6 e At I At
y 2 x1 x2
1 1 0 x1 K x x 2 1 0 x2 0 即 x1 y 2 1 x2 0 u1 u 1 2
《现代控制理论》课后习题答案(完整版)
1-1
解:系统的模拟结构图如下:
系统的状态方程如下:
阿
令 ,则
所以,系统的状态空间表达式及输出方程表达式为
1-2
解:由图,令 ,输出量
有电路原理可知:既得
写成矢量矩阵形式为:
1-3
1-4 两输入 , ,两输出 , 的系统,其模拟结构图如图1-30所示,试求其状态空间表达式和传递函数阵。
当时,
解之得 令 得
当时,
解之得 令 得
当 时,
解之得令得
约旦标准型
1-10
试求两子系统串联联结和并联连接时,系统的传递函数阵,并讨论所得结果解:(1)串联联结
(2)并联联结
1-11
求系统的闭环传递函数解:
求系统的闭环传递函数解:
1-12已知差分方程为
试将其用离散状态空间表达式表示,并使驱动函数u的系数b(即控制列阵)为
(1)
解法1:
解法2:
求T,使得得所以
解:系统的状态空间表达式如下所示:
1-5
列写其相应的状态空间表达式,并画出相应的模拟结构图。解:令 ,则有
相应的模拟结构图如下:
1-6
解:
1-7
‘
(1)画出其模拟结构图
(2) 求系统的传递函数解:
(2)
1-8
(3)(3)
解:A的特征方程
解得: 令得
(或-9
(2)
解:A的特征方程
现代控制理论课后题及答案
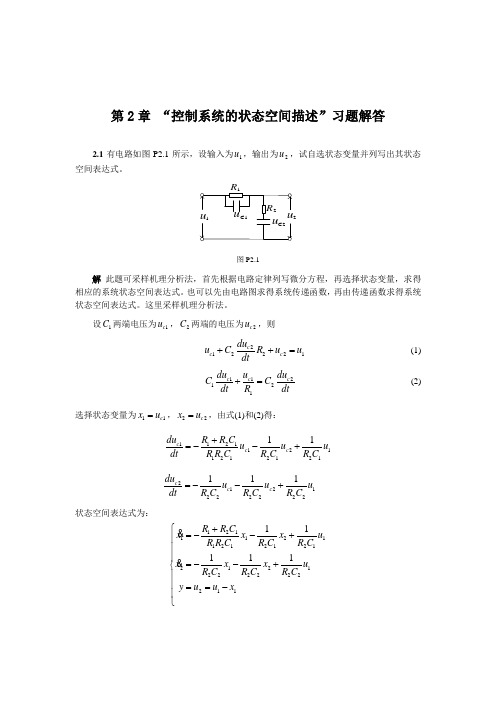
第2章 “控制系统的状态空间描述”习题解答2.1有电路如图P2.1所示,设输入为1u ,输出为2u ,试自选状态变量并列写出其状态空间表达式。
图P2.1解 此题可采样机理分析法,首先根据电路定律列写微分方程,再选择状态变量,求得相应的系统状态空间表达式。
也可以先由电路图求得系统传递函数,再由传递函数求得系统状态空间表达式。
这里采样机理分析法。
设1C 两端电压为1c u ,2C 两端的电压为2c u ,则212221c c c du u C R u u dt++= (1) 112121c c c du u duC C dt R dt+= (2) 选择状态变量为11c x u =,22c x u =,由式(1)和(2)得:1121121121212111c c c du R R C u u u dt R R C R C R C +=--+ 2121222222111c c c du u u u dt R C R C R C =--+ 状态空间表达式为:12111211212121212122222221111111R R C x x x u R R C R C R C x x x u R C R C R C y u u x +⎧=--+⎪⎪⎪=--+⎨⎪⎪==-⎪⎩即: 12121121211112222222211111R R C R C R R C R C x x u x x R C R C R C +⎡⎤⎡⎤-⎢⎥⎢⎥⎡⎤⎡⎤⎢⎥⎢⎥=+⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦--⎢⎥⎢⎥⎣⎦⎣⎦[]11210x y u x ⎡⎤=-+⎢⎥⎣⎦2.2 建立图P22所示系统的状态空间表达式。
1图P2.2解 这是一个物理系统,采用机理分析法求状态空间表达式会更为方便。
令()f t 为输入量,即u f =,1M ,2M 的位移量1y ,2y 为输出量, 选择状态变量1x =1y ,2x = 2y ,3x =1dy dt,24dyx dt =。
现代控制理论第二章答案
cos2t
e At
TeAtT 1
1 0
0 cos2t 2sin 2t
cos2t 0.5sin 2t
2sin 2t
c os 2t
sin 2t1
c os 2t
0
0 0.5
(2)
1 1
I A
2 3 0
4 1
1 1
2 3
1
1
P1 2 P2 2
1 1 T 2 2
0.25
s 0.5
3
s 1 s 3
e At
L1[(sI
A)1]
0.5et 0.5e3t
et e3t
0.25et 0.25e3t
0.5et 0.5e3t
解法四:凯莱—哈密顿定理法
(1) 特征方程:
I A
1 2 4 0
4
0 (t)
1
(t
)
1 1
1 2
1
e1t e2t
s
0
s2 1
1 0
t 1
s
t
x(t) (t)x(0) o (t )Bu( )d
1 0
t1 t 1 11 0 0
t
1
101(
)d
1 2
t
2
t
t 1
1
【习题2-10 】有离散系统如下,求x(k)
1
x(k
1)
2 1
8
1
8 1
x(k
)
1 0
2
0 u1 (k ) 1u2 (k)
(et
(et
e3t ) e3t )
141((eet tee33t t))
1 2
(et (et
《现代控制理论》第三版_.习题答案
1 0 0 3 1 0 5 2 1 52 7 1 5 2 70 125 3 5 7 5 0 0 1 1 B 2 ; 2 5 5
1 0 a1 0 0 1 0 1 0 0 1 a2 3 7 5
0 B 0 1
C (b0 a0bn ) (bn1 an1bn ) 2 1 0
3 1 a 或者 2 2 1 a1 0 a0
e At I At 1 22 1 33 A t A t 2! 3! t2 t4 t6 t3 t5 1 4 16 64 , 4 16 t 2! 4! 6! 3! 5! 3 5 2 4 6 t t t t t t 4 16 64 , 1 4 16 64 3! 5! 2! 4! 6!
0 0 1 B M 1 0 0 0 0 1 M2
1 0 B 1 M1 B1 M2
1 B1 M1 B1 B2 M2
0
0 0 1 0 C 0 0 0 1
1-5. 根据微分方程, 写状态方程, 画模 拟结构图。
1 a2 a2 2 a1 3 2 a a a 1 2 2 a0
1 a2 a1
1 a2
12 b1 b0
b3 b 2 b1 1 b0
凯莱哈密顿法: 1,2 2 j
0 (t ) 1 1 e1t 1 2(e 2 jt e 2 jt ) (t ) 1 2t 4 2 jt 2 jt e j ( e e ) 2 1
现代控制理论基础第二章习题答案
第二章 状态空间表达式的解3-2-1 试求下列矩阵A 对应的状态转移矩阵φ(t )。
(1) ⎥⎦⎤⎢⎣⎡-=2010A (2) ⎥⎦⎤⎢⎣⎡-=0410A (3) ⎥⎦⎤⎢⎣⎡--=2110A (4) ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=452100010A (5)⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=0000100001000010A (6)⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=λλλλ000100010000A 【解】:(1) (2) (3) (4)特征值为:2,1321===λλλ。
由习题3-1-7(3)得将A 阵化成约当标准型的变换阵P 为⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=421211101P ,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡----=-1211321201P线性变换后的系统矩阵为:(5)为结构四重根的约旦标准型。
(6)虽然特征值相同,但对应着两个约当块。
或}0100010000{])[()(1111----⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡------=-=Φλλλλs s s s L A sI L t 3-2-2 已知系统的状态方程和初始条件 (1)用laplace 法求状态转移矩阵; (2)用化标准型法求状态转移矩阵; (3)用化有限项法求状态转移矩阵; (4)求齐次状态方程的解。
【解】:(1) (2)特征方程为: 特征值为:2,1321===λλλ。
由于112==n n ,所以1λ对应的广义特征向量的阶数为1。
求满足0)(11=-P A I λ的解1P ,得:0110000000312111=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--P P P ,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=0011P 再根据0)(22=-P A I λ,且保证1P 、2P 线性无关,解得:对于当23=λ的特征向量,由0)(33=-P A I λ容易求得: 所以变换阵为:[]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-==110010001321P P P P ,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=-1100100011P 线性变换后的系统矩阵为:(3)特征值为:2,1321===λλλ。
实用文档之《现代控制理论》第3版课后习题答案
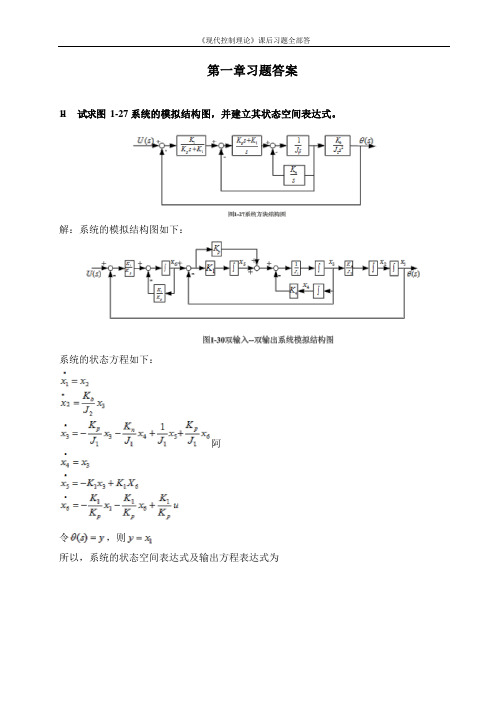
实用文档之"《现代控制理论参考答案》"第一章答案1-1 试求图1-27系统的模拟结构图,并建立其状态空间表达式。
图1-27系统方块结构图解:系统的模拟结构图如下:图1-30双输入--双输出系统模拟结构图系统的状态方程如下:u K K x K K x K K x X K x K x x x x J K x J x J K x J K x x J K x x x pp p p n p b1611166131534615141313322211+--=+-==++--===••••••令y s =)(θ,则1x y =所以,系统的状态空间表达式及输出方程表达式为[]⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡-----=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡••••••654321165432111111112654321000001000000000000010010000000000010x x x x x x y uK K x x x x x x K K K K K K J K J J K J K J K x x x x x x p p pp n p b1-2有电路如图1-28所示。
以电压)(t u 为输入量,求以电感中的电流和电容上的电压作为状态变量的状态方程,和以电阻2R 上的电压作为输出量的输出方程。
U图1-28 电路图解:由图,令32211,,x u x i x i c ===,输出量22x R y =有电路原理可知:•••+==+=++3213222231111x C x x x x R x L ux x L x R 既得22213322222131111111111x R y x C x C x x L x L R x u L x L x L R x =+-=+-=+--=•••写成矢量矩阵形式为:[]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎣⎡----=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡32121321222111321000*********x x x R y u L x x x CCL L R L L R x x x 。
《现代控制理论》第3版课后习题答案
《现代控制理论参考答案》第一章答案1-1 试求图1-27系统的模拟结构图,并建立其状态空间表达式。
11K s K K p +sK s K p 1+s J 11sK n 22s J K b -++-+-)(s θ)(s U 图1-27系统方块结构图解:系统的模拟结构图如下:)(s U )(s θ---+++图1-30双输入--双输出系统模拟结构图1K pK K 1pK K 1+++pK n K ⎰⎰⎰11J ⎰2J K b ⎰⎰-1x 2x 3x 4x 5x 6x系统的状态方程如下:u K K x K K x K K x X K x K x x x x J K x J x J K x J K x x J K x x x pp p p n pb1611166131534615141313322211+--=+-==++--===••••••令y s =)(θ,则1x y =所以,系统的状态空间表达式及输出方程表达式为[]⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡-----=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡••••••654321165432111111112654321000001000000000000010010000000000010x x x x x x y uK K x x x x x x K K K K K K J K J J K J K J K x x x x x x p p pp npb1-2有电路如图1-28所示。
以电压)(t u 为输入量,求以电感中的电流和电容上的电压作为状态变量的状态方程,和以电阻2R 上的电压作为输出量的输出方程。
R1L1R2L2CU---------Uc ---------i1i2图1-28 电路图解:由图,令32211,,x u x i x i c ===,输出量22x R y =有电路原理可知:•••+==+=++3213222231111x C x x x x R x L ux x L x R 既得22213322222131111111111x R y x C x C x x L x L R x u L x L x L R x =+-=+-=+--=•••写成矢量矩阵形式为:[]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎣⎡----=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡32121321222111321000*********x x x R y u L x x x CCL L R L L R x x x 。
《现代控制理论》课后习题答案2
⎪ ⎪⎪an−2
=
−
1 2
tr( AHn−2 )
⎪⎪
#
⎨
(6)
⎪ ⎪
a1
=
−
1 tr( n −1
AH1 )
⎪ ⎪ ⎪⎩
a0
=
−
1 n
tr( AH0 )
利用式(5)和(6),未知矩阵 Hi 和 ai 可以交替计算得到,从而可求出预解矩阵 (sI − A)−1
的解。
求解预解矩阵 (sI − A)−1 的 Matlab 程序为:
x(t) = eA(t−t0 ) x(t0 )
和
∫ x(t) = eAt x(0) + t eA(t−τ )Bu(τ )dτ 0
2.5 试求下列矩阵 A 对应的状态转移矩阵 Φ(t) 。
(1)
A
=
⎡0 ⎢⎣0
1⎤ −2⎥⎦
,
(2)
A
=
⎡0 ⎢⎣4
−1⎤ 0⎥⎦
,
(3)
A
=
⎡0 ⎢⎣−1
1⎤ −2⎥⎦
,
⎡0 1 0 0⎤
⎡λ 0 0 0⎤
⎡0 (4) A = ⎢⎢0
⎢⎣2
1 0 −5
0⎤ 1⎥⎥ , (5) 4⎥⎦
A
=
⎢⎢0 ⎢0
⎢⎣0
0 0 0
1 0 0
0⎥⎥ , 1⎥
(6)
A
=
⎢ ⎢ ⎢
0 0
0⎥⎦
⎢ ⎣
0
λ 0 0
1 λ 0
0
⎥ ⎥
1⎥
λ
⎥ ⎦
答:(1) Φ(t) = L−1 ⎡⎣(sI − A)−1 ⎤⎦
《现代控制理论》第二章习题解答
现代控制理论课后题答案(第二章-第六章)
x1 y 1 0 0 x2 du x3
2.7 试求图 P 2.8 中所示的电网络中,以电感 L1 、 L2 上的支电流 x1 、 x 2 作为状态 变量的状态空间表达式。这里 u 是恒流源的电流值,输出 y 是 R3 上的支路电压。
4
x1
L1 L2
输出方程为:
y x 1 1 y2 x2
写成矩阵形式为:
0 1 0 x x 2 K x 3 M1 4 x 0
0 0 0
1 0 B1 M1 B1 M2
0
x 0 1 1 0 x2 B 1 0 u M1 x 3 1 B B x ( 1 2 ) 4 M2 M2 M2 0
3
d u 3 2
3 x
1
2 x
+
1/s a3
x3
+
1/s a2
x2
+
1 x
1/s a1
+
x1
y
图 P2.5 系统结构图
解 图 P2.5 给出了由积分器、放大器及加法器所描述的系统结构图,且图中每个 积分器的输出即为状态变量,这种图形称为系统状态变量图。状态变量图即描述了系 统状态变量之间的关系,又说明了状态变量的物理意义。由状态变量图可直接求得系 统的状态空间表达式。 着眼于求和点①、②、③,则有
x1 1 1 y 0 x2 2 2 x3
(3) 解 采用拉氏变换法求取状态空间表达式。对微分方程(3)在零初试条件 下取拉氏变换得:
s3Y (s) 2s 2Y (s) 3sY (s) 5Y (s) 5s3U (s) 7U (s)
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
)
0 T
u1 u2
(k) (k)
y(k) 2
1
x1 x2
(k) (k)
当T 0.1s 时我们可以得到
x1 x2
(k (k
1) 1)
1
e0.1 e0.1
0 1
x1 x2
(k) (k)
K (1 K (e0.1
e 0.1 ) 0.9)
0 0.1
0 0
P1
0
得到 P1 0 1T ;
根
据
2 I
A P2
0
1
0 1 P2
0
得
到
P2
11,于是T
0 1
11,T
1
1 1
1 0
于是
G(T )
eAT
T
1 0
0 eT
T
1
eT 1 eT
0
1
H (T )
T eAt dtB
0
T et 0 1 et
0 K
1
dt
0
0 1
T
1 eT 1 e
0
eAt x0
t e A d eAt BK
0
( e A ) ' e A A e A ,两边 t 0
e A |t0
t e A d A t e A d
0
0
所以
t e A d
0
A1 e A
|t0
t 0
e
A
d
A1 te A A1e A |t0
A1 te A A1(e At I )
拉氏反变换法:
(SI
A)1
S 4
1 S
1
1 S2
4
S 4
1
S
e At
L1 (SI
A)1
cos 2t
2sin 2t
1 sin 2t 2 cos 2t
凯莱哈密顿法:1,2 2 j
0 1
(t)
(t)
1 1
1 2
1
e1t e2t
1 4
2(e2 jt e2 jt ) j(e2 jt e2 jt )
代入
x(t) eAt x0 A2 (e At I ) A1te At eAt BK
eAt x0 A2 (eAt I ) A1t BK
2-9. 有系统如图 2-2 所示,试求离散化 的状态空间表达式。设采样周期分别为
T 0.1s 和 1s, 而u1和u2为分段常数。
(一)标准离散化
凯莱哈密顿:
0 1
(t) (t)
1 4
e3t 3et
e3t
et
eAt 0I 1T 同上
2-6. 求下列状态空间表达式的解:
x y
0 1
0
0
(1, 0) x
x
0 1
u
初始状态x(0)
1 1
,
输入u(t)是单位阶跃函数。
根据直接法求e At .
e At
I
At
A2 2!
t2
...
1
0
t 1
x eAt x0
t eA(t ) Bu( )d
0
1
=
0
t 1
1 1
t1
0
0
t
1
0 1
1(
)d
=
1 1
t
t 0
t
1
d
1 2
2
2t 2 2t
t2
2-7. 证明 2-3 中,状态方程的解: 1.
即当u(t) K (t),x(0 ) x0时
x(t) eAt x0 eAt BK , 式中K与u(t)同维的常数矢量。
x eAt x0
t eA(t ) BK t ) ( )d BK
0
e At x0 e A(t ) | 0 BK
eAt x0 eAt BK
2.u(t) K 1(t), x(0 ) x0
(二)近似离散化
eAt 0 (t)I 1(t) A
1 2
2cos 2t 4sin 2t
sin 2t 2cos 2t
(2)
A
1 4
1 1
eAt I At 1 A2t 2 1 A3t3
直接法:
2!
3!
1
t
5
t2 2!
13 6
t
3
,
t t2 7 t3 6
4t 4t2 28 t3, 6
1
t 4 t3 16 t5 3! 5!
1
4
t2 2!
16
t4 4!
64
t66!
约当型法:
I A 0 1,2 2 j
AP1 1P P1 1 2 jT
AP2 2 P2
P2 1 2 jT
T
1 2
j
1 2 j
e At
TetT 1
1 2
2cos 2t 4sin 2t
sin 2t 2cos 2t
T
0 K
T
0
0 1
K
K (1 eT ) (T 1 eT
)
0
T
于是得到离散时间状态空间表达式为:
x1 x2
(k (k
1) 1)
G
(T
)
x1 x2
(k) (k)
H
(T
)
u1 u2
(k (k
) )
1
eT eT
0 1
x1 x2
(k (k
) )
K
K (1 eT ) (T 1 eT
u1 u2
(k) (k)
y(k) 2
1
x1 x2
(k) (k)
当T 1s时我们可以得到
x1 x2
(k (k
1) 1)
1
e1 e1
0 1
x1 x2
(k) (k)
K
(1 e Ke1
1
)
0 1
u1 u2
(k) (k)
y(k) 2
1
x1 x2
(k) (k)
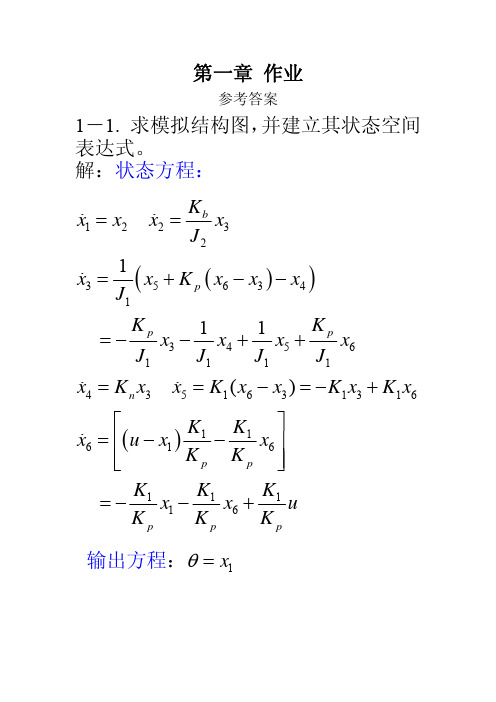
1)根据系统结构图得到系统的状态空间
表达式
x1 x1 Ku1 x2 x1 u2
y 2x1 x2
即
x1 x 2
1 1
0 0
x1 x2
K 0
y 2
1
x1 x2
0 u1
1
u2
2)根据 I A 1
1
0
1 0
得1 0;2 1.
据1I
A
P1
1 1
t
5
t2 2!
13 6
t
3
约当法T
1 2
1 2 ;T
1
1 4
2 2
1 1
e At
1 2(e3t et ),
4
4(e3t
et
)
拉氏反变换法
e3t et
2(e3t
et
)
SI
A 1
1
2(
S
1
3
S
1 ), 1
4
4(
S
1
3
S
1 ), 1
(
S
1 3
1) S 1
2(
S
1 3
S
1
1)
eAt 同上
第二章 作业
参考答案
2-4. 用三种方法计算eAt (定义法,约 当标准型,拉氏反变换,凯莱哈密顿)
(1)
A
0 4
1 0
直接法(不提倡使用,除非针对一些特
例):
eAt I At 1 A2t 2 1 A3t3
2!
3!
1
4
t2 2!
16
t4 4!
64
t6 6!
,
4t 16 t3 64 t5 , 3! 5!
x eAt x0
t eA(t ) BK1(t)d
0
eAt x0
t e A(t )d BK
0
e At x0 A e 1 A(t ) |t0 BK
eAt x0 A1(eAt I )BK
3.u(t) k1(t) x(0) x0
x(t) eAt x0
t eA(t ) BK1(t)d