张量分析在弹性力学中的应用
弹性力学张量分析学习—对于初学者很有用

c ab
ba
c a b (eijk a jbk )ei
ci a jbk eijk a jbk e jki
37
符号ij 与erst
★
a b a b cos
c ab
★
★
a b a b sin
(a b) a (a b) b 0
描述一些复杂的物理量需要二阶(或高阶)张量;
低阶张量的梯度; 低阶张量的并积; 更高阶张量的缩并,等。
张量基本概念
应力张量
张量基本概念
张量的三种记法:
实体记法:
分解式记法:
11e1e1 12e1e2 13e1e3 + 21e2e1 22e2e2 23e2e3 + 31e3e1 32e3e2 33e3e3
Advanced Mechanics of Composite Materials
补充材料 : 张量分析初步
1
目 录
引言
张量的基本概念,爱因斯坦求和约定
符号ij与erst
坐标与坐标转换
张量的分量转换规律,张量方程 张量代数,商法则 常用特殊张量,主方向与主分量 张量函数及其微积分
只要指标 j 或 m 在同项内仅出现两次,且取值范围
和 i 相同。
张量基本概念
约定:
如果不标明取值范围,则拉丁指标 i, j,
k, …表示三维指标,取值1, 2, 3;希腊指标,
, , …均为二维指标,取值1, 2。
张量基本概念
拉丁指标
u=ui ei u1e1 u2e2 u3e3
a b= a1b1 a2b2 a3b3 aibi
同济大学硕士弹性力学第1讲_绪论、张量简介

硕士研究生课程弹塑性力学II(C)第一讲绪论、张量分析简介同济大学地下建筑与工程系《弹性力学》,徐芝伦,高等教育出版社,2006v4《弹性力学》,杨桂通,高等教育出版社,1998《弹塑性力学引论》,杨桂通,清华大学出版社2004《塑性力学》,夏志皋,同济大学出版社,1991《塑性力学基础》,王仁等,科学出版社,1982《塑性力学基础》,北川浩,高等教育出版社,1982《岩土塑性力学原理》,郑颖人等,建筑工业出版社,2002相关书籍Timoshenko S.P, Goodier J N. Theory of elasticity. 3rd ed. New York: McGraw-Hill Book Co, 1970 (徐芝伦译)Chen W.F. Limit analysis and soil plasticity. 1975, New York: Elsevier Scientific Publishing Company;J. C. Simo, T. J. Hughes. Computational Inelasticity.1998,Springer.弹性力学部分目录§1.1弹性力学的任务、内容和方法§1.2弹性力学的基本假设§1.3弹性力学的发展简史§1.1弹性力学的任务、内容和方法•弹性力学,也称弹性理论,是固体力学学科的一个分支基本任务:解决构件的强度、刚度和稳定问题。
最大限度解决并统一经济与安全的矛盾。
研究对象:完全弹性体(包括构件、实体)。
主要研究内容:在外界因素(载荷或温度变化)作用下,弹性体的应力和变形问题。
•弹性是变形固体的基本属性。
弹性体是变形体的一种,它的特征为:在外力作用下物体变形,当外力不超过某一限度时,除去外力后物体即恢复原状。
绝对弹性体是不存在的。
物体在外力除去后的残余变形很小时,一般就把它当作弹性体处理。
•“完全弹性”是对弹性体变形的抽象。
弹塑性力学-02(张量初步)剖析

x a21 x1 a22 x2 a23 x3 a2 j x j ;
' 2
x a31 x1 a32 x2 a33 x3 a3 j x j ;
' 3
再引进自由指标,可以进一步合并成一个表达式:
x aij x j
' i
这里 是哑标, 是自由指标。自由指标可以轮流取该指 标范围内的任何值,关系式将始终成立。
S j Tiji
16
S j Tiji
若哑标的位置不同,则缩并的结果也不同。
例如, Ri Tijj 是一个保留了 i 方向性的矢量,而上述 S j Tiji 是一个保留了 j 方向性的矢量。不同方向性的物理意义是 不一样的 例如在应力张量 ij 中 i 代表的是截面法线的方向,而 表的是截面上应力的分解方向。
=a11b1c1 a21b2 c1 a31b3c1 a12b1c2 a22b2 c2 a32b3c2 a13b1c3 a23b2 c3 a33b3c3
13
练习:将下面表达式按求和约定写成展开形式
ij ij aij bi c j ijij = 1 j1j 2 j 2j 3 j3j = 1111 21 21 31 31
指标符号也适用于微分表达式。例如,三维空间中线元长 度和其分量之间的关系
ds
2
d x1 d x2 d x3
2 2
2
d s d xi d xi
2
多变量函数的全微分可写成
多重求和可以用两对(或几对)不同哑标来表示。例如二重和
f df d xi xi
2
指标分两类:哑指标和自由指标。在表达式或方程的某 项中成对出现(即重复出现两次)的指标,称为哑指标, 简称哑标。哑标定义了一种运算法则,即按照爱因斯坦 (Einstein A.)求和约定,把该项在该指标的取值范围内 遍历求和。例如,两个矢量和之点积的分量表达式为:
附录 弹性力学参量的张量记法
应力分量:
可表示为:
缩写为
其中,如
同理,应变分量可缩写为:
向量
表示为
三阶线性方程组 可表示为 缩写为
二. 爱因斯坦求和约定
在如前述表达式的某项中,某指标重复出现一次,则 表示要把该项在该指标的取值范围内遍历求和,重复指标 称为哑指标(简称哑标);
非重复指标表示要把该项在该指标的取值范围内遍历 列出,非重复指标出称为自由指标(简称自由标)。 例:
在Descartes坐标系下具有相同性质的一组物理量,可 用一带下标的字母表示。如 位移分量 u、v 、w可表示为 u1 、u2、u3,缩写为 ui(i =1, 2, 3) 坐标 x、y、z可表示为x1、 x2、 x3 ,缩写为 xi(i =1, 2, 3) 单位矢量 可表示为 ,缩写为 (i =1, 2, 3)
附录: 弹性力学参量的张量记法
前面给出的体力分量、面力分量、应力分量、应变分量和位 移分量,其表示方法引用的是记号法; 这是一种公认的弹性力学参量表示方法。 上世纪二十年代起,数学理论中的张量记法(指标表示法) 开始出现在力学文献及教科书中。
张量记法书写简洁,便于力学问题的理论推导。
一. 指标符号
求和指标
j求和
j-求和指标 i-自由指标
i历列
说明:
(1)对于重复次数大于1的指标,求和约定无效。例:
(2)哑标的有效范围仅限于本项。
(3)多重求和可采用不同的哑标表示。例:
(4)哑标可局部地成对替换。 (5)自由指标必须整体换名。 (6)当自由指标恰好在同一项中重复出现一次,为避免混 淆,应声明对该指标不求和。例:
三. 求导数的简记方法
微分算符简记法 例:
历列
历列共27项 求和
用张量分析方法推导含偶应力弹性力学有限元理论
河 北 水 利 电 力 学 院 学 报JournalofHebeiUniversityof WaterResourcesandElectricEngineering2021 年3 月第31卷第1期Mar2021Vol31 No1文章编号:2096 — 5680(2021)01 — 0075 — 06用张量分析方法推导含偶应力弹性力学有限元理论孙晓勇1 2 ,宋兴海2,侯娜娜12,付建航2,刘立悦1,2(1.河北省数据中心相变热管理技术创新中心,河北省沧州市重庆路1号061001;2.河北水利电力学院土木工程学院,河北省沧州市重庆路1号061001)摘要:经典弹性力学理论用位移梯度表示无限小变形,不考虑旋转变形,把微元体的旋转视为刚体旋转。
含偶应力弹性力学理论将旋转变形以旋转张量表示,微元体旋转和微元体平动位移同量级,而旋转张量和应变张量同量级,旋转张量与旋转矢量一一对应,用旋转矢量的梯度表示旋转变形。
含偶应力弹性力学理论本构关系包括应力-应变关系和偶应力-曲率张量关 系,用等参变换方法离散单元位移到节点上,从虚功原理出发,增加罚函数项以降低有限元方程对高阶单元的需求,推导了拟 解决三维及二维问题的含偶应力弹性线力学有限元理论,可得三维及二维问题中位移、应力、应变等分布情况,对结构进行力 学评价。
关键词:偶应力;旋转变形;旋转张量;张量分析中图分类号:O343文献标识码:A DOI : 10. 16046/j. cnki. issn2096-5680. 2021. 01. 0151经典线弹性理论与考虑偶应力线弹 性理论在经典弹塑性力学理论中,物体内任意一点的 应力状态只和应变或应变的历史有关,其基本变量为位移,对位移求梯度得到应变张量,用位移梯度描述无限小的变形,然后再由一点的应变张量分析得 到应力张量[1]。
含偶应力的线弹性力学理论认为, 物体内任意一点的微元体,除有各个方向的位移外,还有本身的旋转变形,而这种旋转变形并非单纯的 以旋转角表达,而是用和应变张量一个量级的旋转张量来表示[]。
张量在力学中的应用
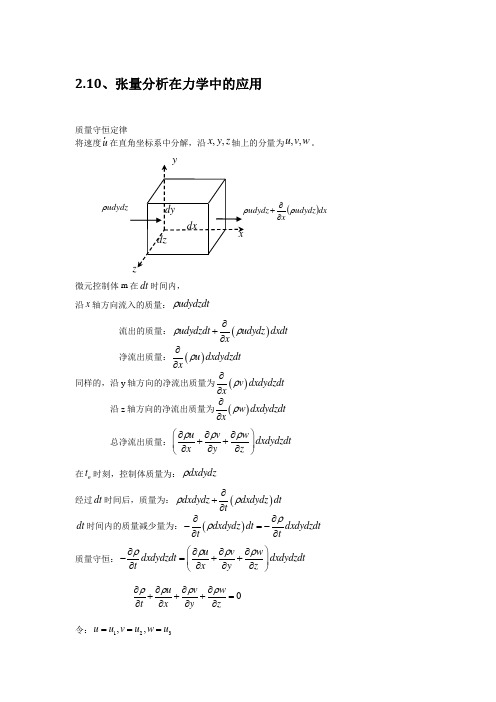
ρ()dx udydz x udydz ρ∂∂+ 2.10、张量分析在力学中的应用质量守恒定律将速度u 在直角坐标系中分解,沿,,x y z 轴上的分量为,,u v w 。
微元控制体m 在dt 时间内,沿x 轴方向流入的质量:udydzdt ρ流出的质量:()udydzdt udydz dxdt x ρρ∂+∂ 净流出质量:()u dxdydzdt xρ∂∂ 同样的,沿y 轴方向的净流出质量为()v dxdydzdt xρ∂∂ 沿z 轴方向的净流出质量为()w dxdydzdt xρ∂∂ 总净流出质量:u v w dxdydzdt x y z ρρρ⎛⎫∂∂∂++ ⎪∂∂∂⎝⎭在o t 时刻,控制体质量为:dxdydz ρ经过dt 时间后,质量为:()dxdydz dxdydz dt tρρ∂+∂ dt 时间内的质量减少量为:()dxdydz dt dxdydzdt t tρρ∂∂-=-∂∂ 质量守恒:u v w dxdydzdt dxdydzdt t xy z ρρρρ⎛⎫∂∂∂∂-=++ ⎪∂∂∂∂⎝⎭0u v w t x y z ρρρρ∂∂∂∂+++=∂∂∂∂ 令:123,,u u v u w u ===123,,x x y x z x === 则: 3121230u u u t x x x ρρρρ∂∂∂∂+++=∂∂∂∂ 310i i iu t x ρρ=∂∂+=∂∂∑ 约定求和:0i iu t x ρρ∂∂+=∂∂ 张量形式:()0u t ρρ∂+∇⋅=∂(可压缩) 0tρ∂=∂,00i u x ρ∂=→∇⋅=∂(不可压缩)动量定理流体运动所遵循的牛顿第二定律可表述为:流体的动量随时间的变化率等于作用在该流体上的诸外力的向量和:()d Mu F dt =微元控制体m 在dt 时间内,沿x 轴方向流入的动量:uudydzdt ρ流出的动量:()uudydzdt uudydz dxdt x ρρ∂+∂ 净流出动量:()uu dxdydzdt xρ∂∂ 同样,沿y 轴方向的净流出动量为()uv dxdydzdt xρ∂∂ 沿z 轴方向的净流出动量为()uw dxdydzdt xρ∂∂ 总净流出动量:uu vu wu dxdydzdt xy z ρρρ⎛⎫∂∂∂++ ⎪∂∂∂⎝⎭ 在o t 时刻,控制体动量为:udxdydz ρ经过dt 时间后,动量为:()udxdydz udxdydz dt tρρ∂+∂ dt 时间内的动量变化为:()u udxdydz dt dxdydzdt t tρρ∂∂=∂∂因此,dt 时间内微元体的动量变化量为:u uu vu wu dxdydzdt tx y z ρρρρ⎛⎫∂∂∂∂+++ ⎪∂∂∂∂⎝⎭ u u u v u w u u u u u v u w dxdydzdt t t x x y y z z ρρρρρρρρ⎛⎫∂∂∂∂∂∂∂∂+++++++ ⎪∂∂∂∂∂∂∂∂⎝⎭u v w u u u u u u v w dxdydzdt tx y z t x y z ρρρρρ⎡⎤⎛⎫⎛⎫∂∂∂∂∂∂∂∂+++++++⎢⎥ ⎪ ⎪∂∂∂∂∂∂∂∂⎝⎭⎝⎭⎣⎦由于连续性方程:0u v w t x y zρρρρ∂∂∂∂+++=∂∂∂∂得: 因此,dt 时间内微元体的动量变化率为:u u u u u v w dxdydz tx y z ρ⎛⎫∂∂∂∂+++ ⎪∂∂∂∂⎝⎭ 微元体受到的力为质量力(体积力)和表面力,微元体受到的质量力为Fdxdydz ρ,表面力:假定左x 面受到的力为x p dydz -,则x 右平面受到的力为()x x x x p dydz p p dydz dx p dydz dydzdx x x∂∂+=+∂∂,因此x 两面受到的合力为:x p dxdydz x ∂∂。
张量分析在弹性力学中的应用

张量分析在弹性力学中的应用自然界的许多问题用数学语言来描述时都需要引入坐标系,但其本质又与坐标无关。
当有些自然规律用坐标形式表达后,由于复杂的方程式往往使得人们忽略了它的内在本质。
张量是一种特殊的数学表达形式,它描述的结果不会因为坐标系的变化而发生变化[1],因此可以摆脱坐标系的影响,反应事物的本质。
此外通过爱因斯坦求和约定、相关记法的规定等常用的表示方法,使得张量的表达形式变得十分简洁。
弹性力学,又称弹性理论,主要是研究弹性体在外力和其它外界因素作用下产生的应力、形变和位移,广泛应用于建筑、机械、化工、航天等工程领域。
为了求得一定边界条件下物体的应力、应变和位移,先对构成物体的材料以及物体的变形作了五条基本假设,即:连续性假设、均匀性假设、各向同性假设、完全弹性假设和小变形假设,然后分别从问题的静力学、几何学和物理学方面出发,导得弹性力学的基本方程,即平衡微分方程、几何方程和本构方程,共15个方程[2]。
由于方程数目的众多,使得我们在分析过程中往往将大部分注意力集中在了方程的形式上,从而忽略问题的本质。
如果将张量引入到物体的应力、应变和位移中,关于弹性问题的15个方程都可以用相关的符号而不是展开式来表示,一方面可以使得书写简便,更重要的是可以将大部分注意力集中在物理原理上而不是方程本身,从而深化对问题的分析[3,4]。
由于表达简洁、不会改变方程式的本质,张量分析得到了广泛的应用。
黄勇对张量的概念做出了具体的分析[5];林诚之利用张量的概念推导了形状比能的表达式[6];赵超先[7]、黄晓琴[8]将张量应用于物理学中,利用应力张量对麦克斯韦磁场力进行了重新推导;明华军等利用监测得到的张量结果得到了岩体破裂面空间方位的计算方法[9];杨天鸿等以现场岩体渗透结构面概率模型统计资料为依据,采用离散介质方法建立典型裂隙网络模型,提出计算岩体结构面网络的等效渗透系数张量方法[10]。
本文的目的并不是概述张量在工程中的应用,而是主要介绍张量在弹性力学中的应用,具体介绍弹性力学中基本方程的张量表达形式以及用张量概念推导的弹性应变能函数的表达式。
张量分析与弹性力学:ch07-03-stressFunction

张
(武汉大学)
张量分 与弹性力学
2016 年 5 月 5 日 5 / 25
弹性力学边值问题的应力解法回顾
1 应变协调方程(Saint Vénant):
∂2Γij ∂xk∂xl
+
∂2Γkl ∂xi∂xj
−
∂2Γik ∂xj∂xl
−
∂2Γjl ∂xi∂xk
=
0
2
应变–应力公式(Hooke):Γij
=
1+ν E τij
−
ν E
τkk
δij
3
平衡(运动)方程(Navier):
∂τ ij ∂xj
+
fi
=
0
(= ρu¨i)
(i = 1, 2, 3)
应力解法
应力解法是以应力分量 τij 作为基本未知量。 把由应变协调方程、应变–应力公式、平衡方程组成的基本方程简化成六 个用应力分量表示的协调方程,再加上平衡方程和力边界条件解出六个应 力分量 τij。 然后由本构方程求应变分量 Γij,再对几何方程积分求得位移分量 ui。
张
(武汉大学)
张量分 与弹性力学
2016 年 5 月 5 日 5 / 25
应力协调方程的推导
在位移解法中,引进三个单值连续的位移函数,使协调方程自动满足,问 题被归结为求解三个用位移表示的平衡方程。然后应变分量可由位移偏导 数的组合来确定。 与此类似,在应力解法中也可引进某些函数,使平衡方程自动满足,把问 题归结为求解用这些函数表示的协调方程。这些能自动满足平衡方程的函 数称为应力函数,应力分量可由其偏导数的组合来确定。 应力函数解法的优点是可以减少未知函数的个数,从而减少方程的个数。
张
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
张量分析在弹性力学中的应用
自然界的许多问题用数学语言来描述时都需要引入坐标系,但其本质又与坐标无关。
当有些自然规律用坐标形式表达后,由于复杂的方程式往往使得人们忽略了它的内在本质。
张量是一种特殊的数学表达形式,它描述的结果不会因为坐标系的变化而发生变化[1],因此可以摆脱坐标系的影响,反应事物的本质。
此外通过爱因斯坦求和约定、相关记法的规定等常用的表示方法,使得张量的表达形式变得十分简洁。
弹性力学,又称弹性理论,主要是研究弹性体在外力和其它外界因素作用下产生的应力、形变和位移,广泛应用于建筑、机械、化工、航天等工程领域。
为了求得一定边界条件下物体的应力、应变和位移,先对构成物体的材料以及物体的变形作了五条基本假设,即:连续性假设、均匀性假设、各向同性假设、完全弹性假设和小变形假设,然后分别从问题的静力学、几何学和物理学方面出发,导得弹性力学的基本方程,即平衡微分方程、几何方程和本构方程,共15个方程[2]。
由于方程数目的众多,使得我们在分析过程中往往将大部分注意力集中在了方程的形式上,从而忽略问题的本质。
如果将张量引入到物体的应力、应变和位移中,关于弹性问题的15个方程都可以用相关的符号而不是展开式来表示,一方面可以使得书写简便,更重要的是可以将大部分注意力集中在物理原理上而不是方程本身,从而深化对问题的分析[3,4]。
由于表达简洁、不会改变方程式的本质,张量分析得到了广泛的应用。
黄勇对张量的概念做出了具体的分析[5];林诚之利用张量的概念推导了形状比能的表达式[6];赵超先[7]、黄晓琴[8]将张量应用于物理学中,利用应力张量对麦克斯韦磁场力进行了重新推导;明华军等利用监测得到的张量结果得到了岩体破裂面空间方位的计算方法[9];杨天鸿等以现场岩体渗透结构面概率模型统计资料为依据,采用离散介质方法建立典型裂隙网络模型,提出计算岩体结构面网络的等效渗透系数张量方法[10]。
本文的目的并不是概述张量在工程中的应用,而是主要介绍张量在弹性力学中的应用,具体介绍弹性力学中基本方程的张量表达形式以及用张量概念推导的弹性应变能函数的表达式。
2 弹性力学中基本方程的张量表达形式[2,3,4]
2.1 用张量表示弹性力学中的基本物理量
对于空间问题,受力物体在外力作用下,物体的各个点都会长生相应的应
来表示
力、应变和位移。
将受力物体上一点的应力状态用应力张量
ij
11121321
2223313233x xy xz ij yx y yz zx zy z σσσσττσσσστστσσσττσ⎛⎫
⎛⎫
⎪ ⎪== ⎪ ⎪ ⎪ ⎪⎝⎭⎝⎭ (1) 其中,,1,2,3i j =,下标1、2、3表示笛卡尔坐标,以下表达式中i ,j 的取值也是如此。
对于ij σ,当i j =时表示正应力;i j ≠时,等表示剪切应力。
将受力物体上一点的位移用位移张量i u 来表示。
i u u v w ⎡⎤
⎢⎥=⎢⎥⎢⎥⎣⎦
(2) 小应变条件下,受力物体一点的应变状态可以用应变张量ij ε来表示
1112
132122
233132
3311()()2211()
()2211()()22ij u
v u u w x
x y
z x v u v v w x y y z y u w v w w
z x
z y
z εεεεεεεε
εε⎛⎫∂∂∂∂∂++
⎪∂∂∂∂∂
⎪⎛⎫ ⎪
∂∂∂∂∂ ⎪==++ ⎪ ⎪∂∂∂∂∂ ⎪ ⎪
⎝⎭
⎪∂∂∂∂∂++ ⎪
∂∂∂∂∂⎝⎭
(3) 其中,对于ij ε,当i j =时表示正应变;i j ≠时表示剪应变。
2.2 弹性力学中的基本方程
(1)平衡方程
000xy x xz
x yx y yz
y zy zx z
z f x
y z f x y z f x y z τσττστττσ∂⎧∂∂+++=⎪
∂∂∂⎪⎪∂∂∂⎪+++=⎨∂∂∂⎪⎪∂∂∂+++=⎪∂∂∂⎪⎩
(4) (2)几何方程
x y z xy
yz zx u v w x y z v u w v u w x y y z z x εεεγγγ∂∂∂⎧===⎪∂∂∂⎪
⎨
∂∂∂∂∂∂⎪=+=+=+⎪∂∂∂∂∂∂⎩
(5) (3)本构方程
1
() 1() 1() xy x x y z xy yz y y x z yz zx z z
x y zx E G E G E G τεσμσσγτεσμσσγτεσμσσγ⎧⎡⎤=-+=⎪⎣⎦⎪
⎪
⎡⎤=-+=⎨⎣⎦⎪
⎪
⎡⎤=-+=⎪⎣⎦⎩
(6) 2.3 将弹性力学中的基本方程用张量表示
利用应力张量,受力物体的平衡微分方程可简化为:, 0ij j i f σ+= (7) 利用应变张量,受力物体的几何方程可以简化为:(),,1
2
ij i j j i u u ε=+ (8)
物体的本构方程可以表示为:1ij ij ij E E
μμ
εσδσ+=- (9)
式中,ij δ为Kronecker 符号,112233x y z σσσσσσσ=++=++。
将式(4)、式(5)和式(6)与(7)、式(8)和式(9)进行对比,我
们可以发现将张量形式引入到弹性力学后,基本方程的表达式明显得到简化,当然简化的前提是我们对张量表示的应力、应变状态以及相应的张量计算规则达到一定的熟
通过将用张量形式表达后的弹性力学基本方程与原方程进行对比,可以发现张量的引入可以使得弹性力学中的相关表达式得到很大的简化,所表达的物理含义更加明显。
利用张量,推导了弹性体的弹性应变能函数。
弹性应变能函数取决于物体的偏应力张量和球应力张量。