2009年电子科技大学839自动控制原理考研试题
成都电子科技大学自动控制原理2006-2016年考研初试真题+答案
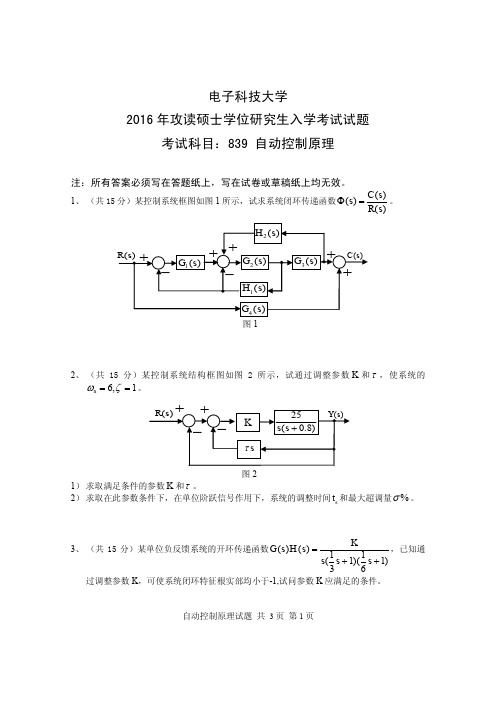
自动控制原理试题 共 3页 第1页电子科技大学2016年攻读硕士学位研究生入学考试试题考试科目:839 自动控制原理注:所有答案必须写在答题纸上,写在试卷或草稿纸上均无效。
1、 (共15分)某控制系统框图如图1所示,试求系统闭环传递函数()()()C s s R s Φ=。
图12、 (共15分)某控制系统结构框图如图2所示,试通过调整参数K 和τ,使系统的6,1n ωζ==。
图21) 求取满足条件的参数K 和τ。
2) 求取在此参数条件下,在单位阶跃信号作用下,系统的调整时间s t 和最大超调量%σ。
3、 (共15分)某单位负反馈系统的开环传递函数()()11(1)(1)36KG s H s s s s =++,已知通过调整参数K ,可使系统闭环特征根实部均小于-1,试问参数K 应满足的条件。
自动控制原理试题 共 3页 第2页4、 (共15分)某负反馈控制系统开环传递函数20()()(1)(2)(5)G s H s s s s =-++,试绘制系统的Nyquist 图,并使用Nyquist 稳定判据分析系统稳定性。
5、 (共15分)某系统结构框图如图3所示,其状态变量为123,,x x x ,试写出系统的状态方程和输出方程。
图36、 (共20分)某旋翼飞机控制系统结构图如图4所示。
图41) 试绘制当参数K 由0→∞变化时,系统的根轨迹图。
2) 当K=1.9时,试确定阵风扰动1()N s s=时,系统的稳态误差。
)自动控制原理试题 共 3页 第3页7、 (共20分)某离散系统如图5所示,采样周期T=0.07s 。
图51) 试求系统的闭环脉冲传递函数。
2) 试判断系统的稳定性,并求出系统单位阶跃响应的终值。
8、 (共20分)某非线性系统如图6所示,其中,非线性元件的描述函数为:21()arcsin ,1N A A A π⎡=+≥⎢⎣图6试判断系统稳定性,并判断是否会产生自持振荡,如会,则求出自持振荡的频率和幅值。
电子科技大学839自动控制原理模拟题三

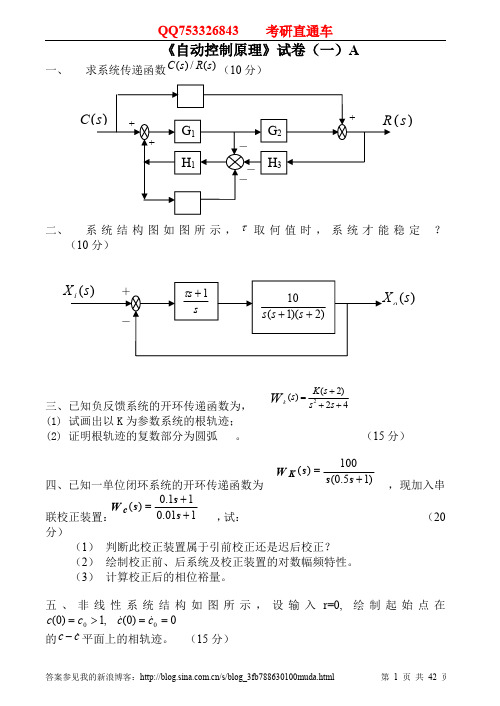
电子科技大学839自动控制原理模拟题三一(15分)求传递函数C (s )/R (s ) 和误差传递函数E (s )/R (s )二(10分)已知二阶系统的单位阶跃响应为)1.536.1sin(e 5.1210)(2.1 t t c t ,试求系统的超调量p 、峰值时间p t 和调节时间st 。
三 控制系统的开环传递函数为G (s ),试画出负反馈系统的根轨迹图,并确定稳定情况下的k 值的范围)4)(2()1()(2s s s s k s G , 四 已知待校正系统的开环传递函数)10625.0)(14.0()(0s s s ks G设计串联校正环节Gc (s ) ,系统动态性能指标为: 五 设未校正系统开环传递函数为)121)(161()(0s ss K s G要求设计校正装置 ,使系统满足下列性能指标 :① 在最大指令速度为180(0)/s 时 ,位置迟后误差不超过10 ;② 相角裕度为00345 ;③ 幅值裕度不低于 10dB ;④ 过渡过程调节时间不超过 3 (s) .六 已知最小相位系统的对数幅频渐近特性如下,试确定系统的开环传递函数,并比较三个系统的相角稳定域度、幅值稳定域度,以及系统在单位阶跃输入,单位斜坡输入,单位加速度输入下的稳态误差,说明系统的好坏。
七 设离散系统如图所示,其中T =0.1s ,K =1,r (t )=1(t ),试求静态误差系数K p 、K v 、K a ,并 计算系统稳态误差e (∞)。
八 非线性控制系统如题4图所示,设0)0()0( cc ,试绘制r (t ) = 1(t )的相轨迹图,给出极限环的运动周期及振幅。
- -110v K s ;18%p ;2.8s t s ;题4图 非线性系统结构图九 试用李亚普诺夫第二法判断下列系统平衡态的稳定性:211x x x ,21232x x x 。
十(15分)设线性系统的动态方程为试判断给系统的可控性可观测性如果不可控或不可观进行可控可观规范性分解电子科技大学839自动控制原理模拟题三答案001110310120130u y x x +x &,一 解题:信号流图如题所示计算C (s )/R (s )和E (s )/R (s )过程中,关于回路和特征式的计算是完全相同,可统一计算。
-2009年自动控制原理研究生入学考试A卷

杭州电子科技大学2009年攻读硕士学位研究生入学考试《自动控制原理》试题(试题共 12 大题,5 页,150分)姓名 报考专业 准考证号 【所有答案必须写在答题纸上,做在试卷或草稿纸上无效!】一、判断题,正确的打√,错误的打×。
(每小题1分,共10分)1.反馈控制就是采用负反馈并利用偏差进行控制的过程。
()2.只有当系统中所有元件的输入-输出特性是非线性的,这类系统才称为非线性控制系统。
()3.传递函数是线性定常系统的一种内部描述模型。
()4.典型二阶振荡环节的阻尼比越大,则超调量越大。
()5.对于Ⅱ型系统,稳态时能准确跟踪斜坡输入信号,不存在误差。
()6.若线性控制系统在初始扰动的影响下,其动态过程随时间的推移逐渐衰减并趋于零,则称系统稳定。
()7.频域分析法是利用闭环频率特性研究系统性能的方法。
()8.绘制系统Bode图时,低频段曲线由系统中的比例环节(放大环节)和积分环节决定。
()9.PD控制是一种相位滞后校正方式。
()10.如果系统部分状态变量的运动可以由输入来影响和控制而由任意的初态达到原点,则状态是完全可控的。
()二、单项选择题,选择一个最合适的答案。
(每小题2分,共20分)1.采用负反馈形式连接后()。
(A) 一定能使闭环系统稳定(B) 系统动态性能一定会提高(C) 一定能使干扰引起的误差逐渐减小,最后完全消除。
(D) 需要调整系统的结构参数,才能改善系统性能。
2.适合应用传递函数描述的系统是( )。
(A) 单输入、单输出的线性定常系统(B) 单输入、单输出的线性时变系统(C) 单输入、单输出的定常系统 (D) 非线性系统()()()M S G S N S =,则闭环特征方程为( )。
3. 若系统的开环传递函数为(A) (B) ()0N s =()()0M s N s +=(C) (D) 与是否为单位反馈系统有关 1()N s +=0()2r t t =的Laplace 变换为( )。
自动控制原理试卷及答案20套
D.抛物线响应函数 答 ( )
3、(本小题 3 分) 如图所示是某系统的单位阶跃响应曲线,下面关于性能指标正确的是――
h (t )
1 .3
1.02
1
0
t
2
B.
4
C.
6
8
10
12
14
A.
t r 6s
t s 4s
t p 14s
D.
% 30%
答
( ) 4、(本小题 5 分)
W (s)
答案参见我的新浪博客:/s/blog_3fb788630100muda.html
第 7 页 共 42 页
QQ753326843
考研直通车
6.已知非线性控制系统的结构图如图 7-38 所示。为使系统不产生自振,是利用 描述函数法确定继电特性参数 a,b 的数值。 (15 分)
答案参见我的新浪博客:/s/blog_3fb788630100muda.html 第 1 页 共 42 页
QQ753326843
考研直通车
r _
e
2 0 1
u
1 s2
c
六、采样控制系统如图所示,已知 K 10, T 0.2s : 1.求出系统的开环脉冲传递函数。 1 2 2.当输入为 r (t ) 1(t ) t * 1(t ) 2 t * 1(t ) 时,求稳态误差 e ss 。
第 5 页 共 42 页
QQ753326843
3.当输入为
1 2 2
考研直通车
r (t ) 1(t ) t * 1(t ) t * 1(t ) 时,求稳态误差 e ss 。
R(s)
E (s)
1 e sT s
jm电子科技大学2009年硕士研究生招生参考书目

808 金融学基础 《 Finance 》 Zvi Bodie 高等教育出版社 / 《金融学》 Robertc.Merton 中国人民大学出版社
809 管理学原理 《管理学原理与方法》 ( 第四版 ) 周三多 复旦大学出版社
复试 机械原理 《机械原理》 王春燕 机械工业出版社 / 《机械原理》 ( 第七版 ) 郑文纬 高等教育出版社出版
复试 激光原理与技术 《激光原理》 ( 第五版 ) 周炳琨 国防工业出版社 2004 年 / 《激光技术》 ( 第二版 ) 蓝信钜 科学出版社 2005 年
复试 计算方法 《实用数值计算方法》 电子科技大学应用数学系 高等教育出版社
837 遥感原理 《遥感原理与应用》 孙家炳 武汉大学出版社
838 遗传学 《遗传学》 王亚馥 高等教育出版社出版 2002 年
839 自动控制原理 《自动控制原理》 李友善 国防工业出版社 / 《自动控制原理》 胡寿松 国防工业出版社
840 物理光学 《光学教程》 叶玉堂 清华大学出版社 2005 年
814 电力电子技术 《电力电子技术》 ( 第四版 ) 王兆安 机械工业出版社 2004 年
815 电路分析基础 《电路分析》 胡翔骏 高等教育出版社 2001 年
817 电子测试技术基础 《电子测量》 ( 第二版 ) 蒋焕文 中国计量出版社 / 《现代电子测试技术》 陈光礻禹 国防工业出版社 / 《电子测量原理》 古天祥 机械工业出版社 / 《数字电子技术基础》 ( 第四版 ) 阎石 高等教育出版社 / 《数字设计 -- 原理与实践》 ( 第三版 ) John F.Wackerly 机械工业出版社 2003 年
电子科技大学09年831考研真题答案
H1 (jω ) x(t) g (t) h1 (t) 1 r(t) h(t)
y1 (t)
y2 (t)
H1 (jω )
1
−1
0
1
t
−2π
−π
0π
π
ω
解: (1) r(t) = x(t) · g (t) 1 FT ← → R(jω ) = X (jω ) ∗ G(jω ) 2π +∞ ∑ π π 1 1 = [jπδ (ω + ) − jπδ (ω − )] ∗ 2π · δ (ω − kπ ) 2π 4 4 2 −∞ =
FT
所以 H (jω ) = |ω |e−j 2ω ,其幅频响应 H (jω ) = |ω |,图形如下: H (jω ) = |ω | π ω −π 0 π 1, |ω | < π ; sin(πt) F T (2) x(t) = πt ← → X (jω ) = 0, 其它. −ωe−j 2ω , −π < ω | < 0; FT y (t) = x(t) ∗ h(t) ← → Y (jω ) = X (jω ) · H (jω ) = ωe−j 2ω , 0 < ω| < π. |ω |e−j 2ω , |ω | < π ; = 0, |ω | > π .
解: (1) 由条件 (I), y [n] 的非零区间范围为 3 n 9,则可知当 n < 0 或 n > 2 时,
h[n] = 0,故可设 h[n] = aδ [n] + bδ [n − 1] + cδ [n − 2],因此可得: h[n] ← → H (z ) = a + bz −1 + cz −2
电子科技大学839自动控制原理模拟题一
电子科技大学839自动控制原理模拟题一一(15分)已知系统如方框图所示,试求闭环传递函数及以输入端定义的误差传递函数二(20分)试求同时满足下列两个条件的K 值:(1) t t r =)(时,稳态误差25.2≤ss e ;(2) 阶跃响应无超调。
三(15分)试绘制T 由0→∞变化的根轨迹,并给出保证系统稳定的T 值范围。
四(15分)已知最小相位系统的开环对数幅频渐近特性如图所示,试求(1)系统的开环传递函数;(2)利用稳定裕度判别系统的稳定性; (3)若要求系统具有︒30五(20分)已知单位反馈系统的开环传递函数为12)1()(23++++=s s a s s K s G ;若使系统以s /rad 2=ω频率持续振荡,试确定相应的K 和a 的值。
六(15分)已知非线性系统如方框图所示,其中 输入0)(=t r ,初始条件为h c >)0(,0)0(=c 。
绘出0=τ及0>τ两种情况下的相轨迹的大致图形,并说明τ存在的作用。
七(15分)已知离散系统如图所示,其中 1=T 秒,试分析系统的稳定性。
八(15分)(1) (2) 九(15分)已知线性系统为u ⎥⎦⎤⎢⎣⎡-+⎥⎦⎤⎢⎣⎡-=12x 1101x ,[]x 10=y ;⎥⎦⎤⎢⎣⎡=11)0(x ; (1) 试求⎩⎨⎧≥<=-0e 0)(t t t u t时,系统的状态响应和输出响应;(2) 确定系统的传递函数矩阵,这个传递函数能否给出系统的充分描述?为什么?十(15分)已知线性系统为u ⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡---=13x 9432x ,[]x 11=y ;(1) 利用状态反馈进行极点配置,使闭环极点配置在)21(j ±-处,求状态反馈矩阵K ; (2) 画出系统的状态变量图。
电子科技大学839自动控制原理模拟题一答案111H G L -=;232H G L -=;213213H H G G G L -=; 21312132123111H H G G H H G G G H G H G ++++=∆;计算)()(s R s C ,3211G G G P =;432G G P =;11=∆;1121H G +=∆; 213121321231111433211)1()()(H H G G H H G G G H G H G H G G G G G G s R s C ++++++=; 计算)()(s R s E ,11=P ;21432H H G G P-=;2311H G +=∆;12=∆; 213121321231121432311)()(H H G G H H G G G H G H G H H G G H G s R s E ++++-+=; ---------------------------------------------------------------------------------------------------------------------点评:正确理解“输入端定义的误差”是计算误差传递函数的要点;如下所述,本题可以应用方框图简化计算传递函数,解题过程过于烦琐; 还可以应用消元法计算传递函数。
自动控制原理A卷答案(2009-2010)
电子科技大学二零 零九 至二零 壹零 学年第 二 学期期 末 考试自动控制原理 课程考试题 A 卷 ( 120 分钟) 考试形式: 闭卷 考试日期 20 10 年 7 月 1 日一、计算题(共100分,共6题,每题10~20 分)1. 已知结构图:求()()C s R s . (15分) 前4步,每步3分;后2步,每步1.5分。
二 系统如图)(1)(t t r =时的响应为)(t h求a K K ,,21?(15分) 解:⎪⎪⎩⎪⎪⎨⎧=-===∞%92218.2%''75.02)(σp t h (2分) )1( 22)(2222212221⎪⎩⎪⎨⎧==⇒++=++=Φnnn n n a K s s K K as s K K s ξωωωξωω (2分))2( 21..lim )().(.lim )(122210==++=Φ=∞→→K sK as s K K s s R s s h s s (2分) )4( 75.012=-=np t ωξπ(2分)ln 0.090.7665%0.09 (5)0.60833(52.55)e πσξβ-=-===⎪===︒⎪⎩(2分)(6) 236.5608.0175.02秒弧=-=πωn (2分)⎪⎩⎪⎨⎧==⨯⨯=====237.6236.5608.0224.27236.51222K a K n n ξωω (3分) 三.已知单位反馈系统的开环传递函数 (1)试确定系统稳定时的K 值范围。
(10分) (2) 时,系统的稳态误差(10分)解:系统特征方程为―――――――――――(2分) 将上述方程化简得到:――――――――――(2分) 劳思表如下:―――――――――(4分) ―――――――――(2分)(2)每个2分, ―――――――――――(10分) 四.已知单位负反馈系的开环传递函数为:画根轨迹。
(20分) 解:2222)(t t t r ++=2222)(tt t r ++=a V P K K K ,,(1) 根轨迹有2条分支;――――――――3分) (2) 根轨迹起点为(0,j0)(-1,j0),终点为(-2,j0)和无穷;――――――――3分)(3) 渐近线一条,与实轴夹角180度;―――――――――3分) (4) 实轴上的根轨迹为(-1,0)和(-∞,-2); ―――――――――3分) (5) 分离点与会合点坐标――――――――3分)――――――――5分)五 设系统结构图如图所示,试确定输入信号()3sin(230)r t t =+︒作用下, 求(1)()ss c t =?(8分) (2)系统的稳态误差?(2分) 解:(1)每步2分,共8分 (2)――――――――2分) 六.已知系统(1)绘制系统的对数幅频渐进特性曲线。
电子科大839自动控制原理第二章讲解
第二章 控制系统的数学模型2.1 知识框架2.2 重难点2.2.1 时域和频域的变换要知道我们现实生活中的系统都是有一些元器件组成的电路,现实生活中是时域(频域是为了方便计算研究出现的),所以要对一个系统进行研究计算,首先第一步是根据元器件的时域性质列出微分方程,通过拉氏变换才能转化为频域的传递函数什么的。
微分方程的建立和求解多年以来都是本章的考试范围,但自从06年之后再也没有考过,不过因为即使考也考得比较简单,就是以下两个图没有变化,所以在这里也简单讲一下,主要是为了便于给大家对系统建立一个比较连贯的认识。
图2.1-1 真题05年第一题图2.1-2 真题06年第一题 就讲图2.1-1吧。
()o U t()o U t 1) 微分方程式的建立与求解 2) 传递函数 3) 脉冲响应 4) 方框图绘制与化简 5) 信号流图 6) 状态方程式7) 各种数学模型的相互转换设回路电流为()i t ,由基尔霍夫定律可写出回路方程为()()()()()()o i o di t Lu t Ri t u t dtdu t C i t dt ++==消去中间变量()i t ,得到微分方程20002()()()()i d u t du t LCRC u t u t dt dt++=其中,()i ut 是输入,0()u t 是输出,经过拉氏变换之后,0()()i U s U s 即使时域中该系统的传递函数。
各种数学模型的相互转化是一个难点,主要在于书上只是零散的对各种模型稍微提了一下,并没有针对性的讲解,不过06年之后考试中再没有遇见过直接对模型进行变换的,一般是给出一种模型(时域或频域),需要考生变换为另外一种对应模型(时域或频域)后才能用于题目的计算。
模型的关系其实是微分方程求解的一个过程,用到了拉氏变换和拉式反变换。
下面先通过一道题让大家看看,配套习题的2-9:2-9 若系统在阶跃输入()1()r t t =时,零初始条件下的输出响应2()1t t c t e e --=-+,试求系统的传递函数和脉冲响应。
历年华南理工大学833自控基础综合考研真题试卷与真题答案
历年华南理工大学833自控基础综合考研真题试卷与真题答案一、考试解读:part 1 学院专业考试概况①学院专业分析:含学院基本概况、考研专业课科目:833自控基础综合的考试情况;②科目对应专业历年录取统计表:含华工控制工程相关专业的历年录取人数与分数线情况;③历年考研真题特点:含华南理工大学考研专业课833自控基础综合各部分的命题规律及出题风格。
part 2 历年题型分析及对应解题技巧:根据华工833自控基础综合考试科目的考试题型(名词解释、简答题、论述题等),分析对应各类型题目的具体解题技巧,帮助考生提高针对性,提升答题效率,充分把握关键得分点。
part 3 近年真题分析:最新真题是华工考研中最为珍贵的参考资料,针对最新一年的华南理工大学考研真题试卷展开深入剖析,帮助考生有的放矢,把握真题所考察的最新动向与考试侧重点,以便做好更具针对性的复习准备工作。
part 4 2019考试展望:根据上述相关知识点及真题试卷的针对性分析,提高2019考生的备考与应试前瞻性,令考生心中有数,直抵华工考研的核心要旨。
part 5 华南理工大学考试大纲:①复习教材罗列(官方指定或重点推荐+拓展书目):不放过任何一个课内、课外知识点。
②官方指定或重点教材的大纲解读:官方没有考试大纲,高分学长学姐为你详细梳理。
③拓展书目说明及复习策略:专业课高分,需要的不仅是参透指定教材的基本功,还应加强课外延展与提升。
part 6 专业课高分备考策略:①考研前期的准备;②复习备考期间的准备与注意事项;③考场注意事项。
part 7 章节考点分布表:罗列华工833自控基础综合考研专业课试卷中,近年试卷考点分布的具体情况,方便考生知晓华工考研专业课试卷的侧重点与知识点分布,有助于考生更具针对性地复习、强化,快准狠地把握高分阵地。
二、华南理工历年考研真题试卷与答案详解:汇编华工考研专业课考试科目的2003-2018年考研真题试卷,并配备2003-2018年考研真题答案。