第六章梁弯曲时的位移
材料力学梁的位移思维导图

材料力学梁的位移思维导图
材料力学梁的位移分析是一种复杂的思维,可以很好地帮助我们研究物理系统中的物理行为.以下是材料力学梁的位移思维导图:
I、定义梁:
1. 梁定义:梁是一种结构,由支撑它的支柱或壁连接到一组顶点,其中顶点可以是拱形形状或悬挂形状,能够承受弯矩外力。
2. 梁位移:梁的位移是指支撑它的支架或壁的相对位移。
它可以是相对位移、平行位移或扭矩位移
II、物理性质:
1. 梁的弯曲性:由于梁作为物体的一部分,它受到来自外界的外力,将会产生弯曲变形。
2. 梁的挠度:梁的挠度是梁的弯曲变形的程度。
它可以在梁的不同部位分布,高挠度会使梁变形更加明显。
III、位移测定:
1. 静力学:静力学方法可以通过对梁外力和顶点位移的测量,来确定梁位移的大小和分布情况,以及如何受到外力的影响。
2. 动态位移:动态位移测量将会提供深入的信息,这些信息会反映梁的动态行为,也就是振动响应。
IV、位移分析:
1. 力/位移关系:通过分析梁的力/位移关系,可以对梁的变形情况有一定的了解,以及梁承受外力时应激变形的状况。
2. 梁模型:通过建立梁模型,可以研究梁受到不同外力大小时的位移反应,并预测梁在某一状况下应受外力的大小。
V、总结:
材料力学梁的位移分析是一种复杂的思考,它主要包括梁的定义、物理性质、位移测定以及位移分析,可以很好地帮助研究者深入了解物理系统中物体的力学行为。
通过研究梁的弯曲性、挠度、力/位移关系以及建立梁模型,可以研究出梁的变形情况、预测梁应遭受的外力范围等,从而提高工件的力学性能和强度。
第6节(弯曲变形)

Mechanics of Materials
中南大学土木建筑学院力学系
Department of Mechanics of School of Civil Engineering and Architecture of Central South University
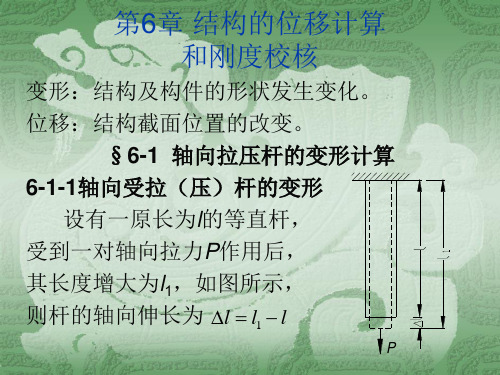
第六章 弯曲变形 第一节 概述
Fx Fl
转角方程
EI(x)1Fx2FlxC
2 挠度方程
E Iv(x)1F x31F lx2C xD 62
EI
d2v dx2
Fx Fl
EI(x)1Fx2FlxC
2
E Iv(x)1F x31F lx2C xD 62
⑶ 确定积分常数
EI(0)1F02Fl0C0
2 E Iv(0 )1F 0 31F l0 2 C 0D 0
EI(x)b2F l x2C1
E I(x)b 2 F l x2F 2(xa)2C 2
挠度方程
EIv(x)b6F l x3C1xD1 E Iw (x ) b 6 F lx 3F 6(x a )3 C 2xD 2
⑶ 确定积分常数
v(0)E 1 I(b 6 F l03C 10D 1)0
v (l) E 1 I[ b 6 F ll3 F 6(l a )3 C 2 l D 2 ] 0
max
(0)
Fl2 3EI
(x) 0
x (3 3)l 3
(33)l F l3
F l3
vm a xv(
) 0 .0 6 4 2
3 93E I
E I
例:简支梁AB如图所示(图中a > b),承受集中载荷F作 用,梁的弯曲刚度为EI。求此梁的挠曲轴方程和转角方程, 并确定挠度的最大值。
材料力学 梁 弯曲位移

D点的连续条件: x = a, 1' 2 ' 1 2
1 ( 0 x a)
2 (axl )
挠曲线方程
EI
1"
M1
F
b l
x
EI
2"
M
2
F
b l
x
F
(
x
a)
转角方程
EI
'
1
F b l
x2 2
C1
EI
2'
F
b l
x2 2
F
(
xa)2 2
D1
挠度方程
EI
1
F
b l
x3 6
C1 x
C2
EI
2
F
b l
式中:积分常数 C1 、C2 可通过梁挠曲线的 边界条件 和 变形 连续性条件 来确定。
1、边界条件
A
l A= 0
B
B= 0
A
A= 0
B
B= 0
在简支梁或外伸梁中, 铰支座处的挠度 都应等于零。
A 0 B 0
A
B
l A= 0 A= 0
在悬臂梁 中,固定端处的挠度 和转角 都应等于零。
A 0, A 0
F
(
xa)2 2
D1
挠度方程
EI
1
F
b l
x3 6
C1 x
C2
EI
2
F
b l
x3 6
F
(x 6
a)3
D1
x
D2
x = 0 , 1 = 0
x = l , 2= 0
再将边界条件代入方程可解得:
梁弯曲的位移

max
Wmax
该梁的边界条件为:在 x=0 处 w 0, w 0.
C1 0,C2 0
梁弯曲的位移
从而有 转角方程
Fxl Fx2 w EI 2 EI
Fx2l Fx3 挠曲线方程 w 2 EI 6 EI
根据该梁边界条件和全梁横截面上弯矩均为负值,
以及挠曲线应光滑连续描出了挠曲线的示意图。
明显不同。
1 m EI
梁弯曲的位移
在图示坐标系中,挠度w向下为正,向上为负;
顺时针转向的转角 为正,逆时针转向的转角 为负。
梁弯曲的位移
Ⅰ. 挠曲线近似微分方程的导出 在§4中曾得到等直梁在线弹性范围内纯弯曲情况下 中性层的曲率为
这也就是位于中性层内的挠曲线的曲率的表达式。
梁弯曲的位移
w
梁弯曲的位移
Ⅱ. 挠曲线近似微分方程的积分及边界条件
M x w EI
求等直梁的挠曲线方程时可将上式改写为
进行积分,再利用边界条件确定积分常数。
M x w EI
E=常数:均匀梁 。 I=常数:等截面梁 。
梁弯曲的位移
挠度: y w( x) 已知:
M x 转角: dy w / w dx EI
例题: 试求图示等直梁的挠曲线方程和转角方程,
并确定其最大挠度wmax和最大转角max。
x
F
max
Wmax
L
梁弯曲的位移
解:该梁的弯矩方程为
M x F l x
x
F
挠曲线近似微分方程为
EIw M x F l x
以 x 为自变量进行积分得 x2 EIw F lx C1 2 lx 2 x 3 EIw F 2 6 C1 x C2 于是得
弯曲变形——精选推荐

第六章弯曲变形判断弯曲变形1、“平面弯曲梁的挠曲线必定是一条与外力作用面重合或平行的平面曲线”2、“由于挠曲线的曲率与弯矩成正比,因此横截面的挠度与转角也与横截面的弯矩成正比”3、“只要满足线弹性条件,就可以应用挠曲线的近似微分方程”4、“两梁的抗弯刚度相同、弯矩方程相同,则两梁的挠曲线形状相同”5、“梁的挠曲线方程随弯矩方程的分段而分段,只要梁不具有中间铰,梁的挠曲线仍然是一条光滑、连续的曲线。
”6、“最大挠度处的截面转角一定为0”7、“最大弯矩处的挠度也一定是最大”8、“梁的最大挠度不一定是发生在梁的最大弯矩处。
”9、“只要材料服从虎克定律,则构件弯曲时其弯矩、转角、挠度都可以用叠加方法来求”10、“两根几何尺寸、支撑条件完全相同的静定梁,只要所受的载荷相同,则两梁所对应的截面的挠度和转角相同,而与梁的材料是否相同无关”11、“一铸铁简支梁在均布载荷的作用下,当其横截面相同且分别按图示两种情况放置时,梁同一截面的应力和变形均相同”选择弯曲变形1、圆截面的悬臂梁在自由端受集中力的作用,当梁的直径减少一半而其他条件不变时,最大正应力是原来的倍;最大挠度是原来的倍。
若梁的长度增大一倍,其他条件不变,最大弯曲正应力是原来的倍,最大挠度是原来的倍。
A:2; B:16 C:8 D:4;2、y’’=M(x)/EI在条件下成立。
A:小变形; B:材料服从虎克定律;C:挠曲线在xoy面内; D:同时满足A、B、C;3、等直梁在弯曲变形时,挠曲线最大曲率发生在处。
A:挠度最大; B:转角最大 C:剪力最大; D:弯矩最大;4、在简支梁中,对于减少弯曲变形效果最明显。
A:减小集中力P; B:减小梁的跨度;C:采用优质钢; D:提高截面的惯性矩5、板条弯成1/4圆,设梁始终处于线弹性范围内:①σ=My/I Z,②y’’=M(x)/EI Z哪一个会得到正确的计算结果?A:①正确、②正确;B:①正确、②错误; C:①错误、②正确; D:①错误、②错误;6、应用叠加原理求横截面的挠度、转角时,需要满足的条件是。
工程力学c材料力学部分第六章 弯曲变形
A l/2
C l
B
解:此梁上的荷载可视为 正对称和反对称荷载的叠加, 正对称和反对称荷载的叠加, 如图所示。 如图所示。 正对称荷载作用下:
q/2
5(q / 2)l 4 5ql 4 wC1 = − =− 384 EI 768 EI
B
(q / 2)l 3 ql 3 θ A1 = −θ B1 = =− 24 EI 48EI
w P A a D
a
A C a H a B
EI
Pl 3 wB = − 3 EI
P
B
l
Pl 2 θB = − 2 EI
P A a 2a 2a C B
P/2
P/2 B
P/2
=
A
+
P/2
力分解为关于中截面的对称和反对称力( )之和的形式。 解:将P力分解为关于中截面的对称和反对称力(P/2)之和的形式。 力分解为关于中截面的对称和反对称力 显然,在反对称力( / )作用下, 显然,在反对称力(P/2)作用下,wc=0 对称力作用的简支梁, 对称力作用的简支梁,可以等效为悬臂梁受到两个力的作用 的问题。 的问题。
wA=0 θA=0
B
②、变形连续条件 变形连续条件: 连续条件
P A C θC左 wC左= wC右, =θ C右 B
的悬臂梁, 例1:图示一弯曲刚度为 的悬臂梁,在自由端受一集中力 作 :图示一弯曲刚度为EI的悬臂梁 在自由端受一集中力F 试求梁的挠曲线方程,并求最大挠度及最大转角。 用,试求梁的挠曲线方程,并求最大挠度及最大转角。 解:① 建立坐标系并写出弯矩方程 ①
在小变形情况下, 曲线弯曲平缓, 在小变形情况下,挠曲线弯曲平缓,
∴ w′ ≪ 1
2
梁位移计算公式

梁位移计算公式梁的位移计算公式基于梁的受力平衡和材料力学的基本原理。
在这里,我们将讨论一维梁的位移计算方法,即假设梁只在一个平面内受力,并且假设梁的截面尺寸和材料性质均为均匀的。
我们需要确定梁的边界条件。
常见的边界条件有两种:固定边界条件和自由边界条件。
在固定边界条件下,梁的两端被固定,不允许有任何位移和旋转;而在自由边界条件下,梁的两端可以自由位移。
接下来,我们需要确定梁的受力情况。
通常,梁在两端受到外部荷载作用,这些荷载可以是集中力、均布力或者集中力和均布力的组合。
此外,梁还可能受到自重的影响。
在计算位移时,我们需要将这些荷载转化为梁上的内力分布。
针对不同的受力情况,我们可以使用不同的位移计算方法。
在本文中,我们将重点介绍三种常见的位移计算方法:拉梁法、剪梁法和挠梁法。
拉梁法是一种基于受力平衡的位移计算方法。
它假设梁的变形是由拉伸和压缩引起的,而不考虑剪切变形。
根据拉梁法,我们可以通过梁上任意一点的变形位移和受力来计算梁的位移。
剪梁法是一种基于受力平衡和材料切变变形的位移计算方法。
它假设梁的变形是由剪切引起的,并考虑了横截面的形状和材料的性质。
根据剪梁法,我们可以通过梁上任意一点的切变位移和受力来计算梁的位移。
挠梁法是一种基于弯曲变形的位移计算方法。
它假设梁的变形是由弯曲引起的,并考虑了横截面的形状和材料的性质。
根据挠梁法,我们可以通过梁上任意一点的弯曲位移和受力来计算梁的位移。
在实际应用中,我们可以将以上三种方法结合起来,综合考虑拉伸、压缩、剪切和弯曲等因素,来计算梁的位移。
此外,我们还可以使用计算机辅助工具,如有限元分析软件,来进行更精确和复杂的梁位移计算。
需要注意的是,梁的位移计算是一个复杂的过程,需要综合考虑各种因素和假设。
在实际工程中,我们应该根据具体情况选择适当的位移计算方法,并进行合理的假设和简化,以确保计算结果的准确性和可靠性。
通过以上的讨论,我们可以看到,梁的位移计算是一个重要且复杂的问题。
第六章结构的位移计算和刚度计算
各点的位置产生(相对)移动(线位移),使 杆件横截面产生(相对)转动(角位移)。 2、位移的分类:6种 绝对位移:点(截面)线位移––分解成水平、 垂直两方向 截面角位移: 杆件角位移: 相对位移:两点(截面)相对线位移––沿连线 方向 两截面相对角位移: 两杆件相对角位移:
3、引起位移的原因 A、荷载作用:(荷载→内力→变形→位移) B、温度改变:静定结构,温度改变,→0应力 非0应变→结构变形 (材料胀缩引起的位移性质同) C、支座移动;(无应力,无应变,但几何位置 发生变化) 6-2-2单位荷载法
Nl l EA
若将式改写为 及轴向线应变 l 代入,则可得出胡克定律的 l 另一表达式为
l 1 N l E A
,并以轴向应力
N A
E
故胡克定律也可简述为:当杆内应力不超 过材料的比例极限(即正应力与线应变成正比 的最高限应力)时,应力与应变成正比。
例题6-1-1 有一横截面为正方形的阶梯形砖柱, 由上下I、II两段组成。其各段的长度、横截面 尺寸和受力情况如图2-12所示。已知材料的弹 性模量E=0.03×105MPa,外力P=50kN。试 P 求砖柱顶面的位移。 解:假设砖柱的基础没有沉陷, A P P Ⅰ 3m 则砖柱顶面A下降的位移等于全 B 柱的缩短。由于柱上、下两段 4m 的截面尺寸和轴力都不相等, Ⅱ C 故应用公式
例题6-1-2 在图所示的结构中,杆AB为钢杆, 横截面为圆形,其直径d=34mm;杆BC为木 杆,横截面为正方形,其边长a=170mm。二 杆在点B铰接。已知钢的弹性模量E1= 2.1×105MPa,木材顺纹的弹性模量E2= 0.1×105MPa。试求当结构在点B作用有荷载P =40kN时,点B的水平位移及铅直位移。 解: (1)取出节点B为脱离体,并以N1、N2分别表 示AB及BC二杆的内力。运用平衡方程 P 40 Y 0 由 ,可得 N1 80kN o
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
例一 图示B端作用集中力P的悬臂梁,求
其挠曲线方程。
F
x
A
qmax
x
l
B fmax
y
解:建立坐标系如图
梁弯曲时的位移
x处弯矩方程为: M (x) F(l x)
列挠曲线方程并积分两次:
EIv" M (x) F (l x)
EIv'
Flx
Fx2 2
C1
EIv
FLx2 2
Fx3 6
C1x
C2
如图示,要计算三种载荷作用下在某截面如C 截面挠度,则可直接查表求出各载荷单独作用 下的挠度,然后叠加(代数和)。
如果不能直接查表,则要采用分段刚化法将其 化成可查表形式。
③挠曲线方程:挠度是位置坐标的函数— v=f(x)
④转角方程(小变形下):转角是位置坐标的函数。q q (x) 转角与挠度的关系—q tgq dv f '( x )
dx
第二节 梁的挠曲线近似微分方程及其积分
一、挠曲线近似微分方程deflection equation
1.力学关系:梁平面弯曲时曲率: 1 M (x)
(x) EI
2.数学依据:曲线 v= f (x) 的曲率为
1
(x)
v 1 v2
32
v' '
x
x
M M
M 0,v 0
y
M M
M 0,v 0
y
3.挠曲线近似微分方程:
1
(x)
v (1 v2 )3/ 2
v
M (x) EI
EIv'' M (x)
二、积分法求梁的挠曲线
梁弯曲时的位移
1. EIv'' M (x)
(2)等直梁在纯弯曲时,弯矩为常量,挠曲线的曲率也是常量,其挠曲线是一段圆 弧线。
(3)等直梁在横力弯曲时,其曲率与该处的弯矩成正比,曲率是位置坐标的函数。
2.梁位移的度量:
x
A
q
q v
F x
B
y
B1
①转角rotation :梁横截面绕中性轴转动的角度q。
单位:rad,顺时针转动为正。
②挠度deflection :梁横截面形心的竖向位移v。单位: mm。向下的挠度为正。
由边界条件决定积分常数:
v'|x0 0 ,得:C1 0; v |x0 0 ,得:C2 0
转角和挠曲线方程分别为:
q v' Fx (2l x)
2EI
v Fx2 (3l x) 6EI
qmax
qB
FL2 2EI
fmax
vB
FL3 3EI
例二 求图示梁受集中力F作用时的挠曲线方程。 梁弯曲时的位移
x
F
A
B
a Cb
FA
l
FB
解: 1、求支反力
FA
Fb; l
FB
Fa l
AC段(0 x a)
CB段(a x l)
EIv" Fb x l
Fbx2 EIv' 2l C1
EIv
Fbx3 6l
C1x
D1
EIv" F(x a) Fb x l
EIv '
F 2
(x
a)2
Fbx2 2l
C2
EIv
积分一次 EIv' M (x)dx C1 EIq — 转角方程; 再积分一次 EIv ( M (x)dx)dx C1x C2 — 挠曲线方程。
式中C1、C2为积分常数,由梁边界、连续条件确定。 2.支承条件与连续条件: 1) 支承条件:
y
y
y
v0
v0
v 0;v 0
2) 连续条件:挠曲线是光滑、连续、唯一的
v F [ l (x a)3 x3 (l 2 b2 )x] 6EIl b
v' Fb (l 2 b2 3x2 ) 6EIl
v' F [ l (x a)2 x2 1 (l 2 b2 )]
2EIl b
3
梁挠曲线大致形状的绘制
步 骤: (1)绘制梁的弯矩图。 (2)由梁弯矩的变化规律,确定挠曲线曲率的变化规律。由 M 的方向确定轴线的凹凸性。 (3)根据梁的支座情况,考虑变形连续光滑性、协调性,确 定挠曲线的大致形状及位置。 注:挠曲线的曲率与该处的弯矩成正比,弯矩越大,则曲 率也最大。
F 6
(x
a)3
Fbx3 6l
C2x
D2
x a时,v ' v ',则 C1 C2; v v ,则 D1 D2
x 0处,v 0,得 D1 D2 0;
x l处,v 0,得
C1 C2
Fb (l 2 b2 ) 6l
AC段(0 x a)
CB段(a x l)
v Fbx (l 2 b2 x2 ) 6EIl
滑连续的曲线。
F
A
x
B
y
B1
注:(1)平面弯曲中,挠曲线是一个平面曲线,且连续光滑;
(2)梁的挠曲线是弹性曲线;(3)以挠曲线的曲率度量弯曲变
形的程度。平面弯曲时,其弯矩与曲率的物理关系:
曲率公式的特征:
k 1 M (x)
(x) EI
(1)公式推导中应用了胡克定律,故适用于线弹性范围内。并不计剪力对弯曲变形 的影响。
第六章 梁弯曲时的位移
第一节 概述 第二节 梁的挠曲线近似微分方程及其积分 第三节 叠加法求梁的位移 第四节 梁的刚度校核 提高梁的刚度措施 第五节 梁内的弯曲应变能
第一节 概述 一.研究弯曲变形的目的 1.限制构件的变形,使其满足刚度要求。
在工程中,对某些受弯构件,要求变形不能过大,即要求构 件有足够的刚度,以保证正常工作。
第三节 叠加法求梁的位移
梁弯曲时的位移
说明:
1.在材料服从胡克定律、且变形很小的前提下,载荷 与它所引起的变形成线性关系。
2.当梁上同时作用几个载荷时,各个载荷所引起的变 形是各自独立的,互不影响。
3.若计算几个载荷共同作用下在某截面上引起的变 形,则可分别计算各载荷单独作用下的变形,然后 叠加。
F
C
v
|xC
,q
|
xC
q
|
xC
3.积分法确定梁弯曲变形的步骤:
①建立坐标系,确定支反力。 ②写出弯矩方程;若弯矩不能用一个函数给出,则要分段写出。 ③写出挠曲线近似微分方程,并积分得到转角、挠度函数。 ④利用边界条件、连续条件确定积分常数。
如果分 n 段写出弯矩方程,则有 2 n 个积分常数 ⑤代入积分常数,得到转角方程和挠度方程,从而得到各截 面上的挠度和转角沿跨长的变化情况。 ⑥确定最大挠度和最大转角。
工程实例
桥式起重机的横梁变形过大,则会使小车行走困难, 出现爬坡现象。
2.利用弯曲变形
在一些情况下,却要求构件具有较大的弹性变形,以满 足特定的工作需要。
工程实例
车辆上的钢板弹簧,要求有足够大的变形,以缓解 车辆受到的冲击和振动作用。
P
P
2
2
P
3.求解超静定问题。
二.基本概念
梁弯曲时的位移
1.梁的挠曲线deflection curve :梁轴线变形后所形成的光