第四章 变结构控制 2008-2-18
毕业论文--汽车典型ABS的结构原理与故障分析
汽车典型ABS的研究Representative ABS of automobileresearch(申请学位)独创性声明本人声明所呈交的论文是本人在导师指导下进行的研究工作和取得的研究成果,除了文中特别加以标注和致谢之处外,论文中不包含其他人已经发表或撰写过的研究成果,也不包含为获得长春汽车工业高等专科学校或其他教育机构的学位或证书而使用过的材料。
与我一同工作的同志对本研究所做的任何贡献均已在论文中作了明确的说明并表示了谢意。
论文作者签名:刘玉钊签字日期:年月日学位论文版权使用授权书本论文作者完全了解长春汽车工业高等专科学校有关保留、使用论文的规定。
特授权长春汽车工业高等专科学校可以将论文的全部或部分内容编入有关数据库进行检索,并采用影印、缩印或扫描等复制手段保存、汇编以供查阅和借阅。
(保密的论文在解密后适用本授权说明)论文作者签名:刘玉钊导师签名:签字日期:年月日签字日期:年月日中文摘要摘要:随着汽车技术的不断改进,ABS已逐渐成为汽车的标准配件。
在当代,安装ABS的车辆已经相当普遍,经济型车也安装有ABS并且随着对汽车安全性能的要求越来越高,一些更为先进的、保护范围更加广泛的安全装置相继问世了。
随着汽车技术的不断改进,ABS已逐渐成为汽车的标准配件,虽然ABS能大大提高汽车的制动性能,但是不同类型的ABS在制动中发挥的作用却不尽相同,驾驶员如果缺乏对各类ABS性能特点的了解,则可能在车辆紧急制动时得不到预想的制动效果,甚至会发生意外情况。
了解ABS这些技术对汽车制动系统的维修和故障诊断工作都是十分重要的。
本文主要介绍汽车ABS技术发展,ABS 基本结构和工作原理,ABS系统的检修,并对典型ABS系统的车辆也作了简要介绍。
关键词:ABS结构组成;ABS工作原理;故障检测ABSTRACTWith the continuous improvement of technology, ABS has become automobile standard parts.Install abs in the vehicle has been fairly general, there are also install abs car as to the safety requirements are higher, some more sophisticated, more extensive scope ofprotection of safety equipment were made. as a technological upgrading, abs is becoming a standard of the car, although abs can vastly improve the brake performances, but different types of abs in the role of the brake, but not identical If the lack of abs for the performance of understanding, may in the emergency brake is not anticipated the results are even'll be an accident. that abs these technologies is the brake system maintenance and failure diagnosis work is very important. this paper mainly introduces the abstechnological development, abs basic structure and workingmechanism, abs system. the typical abs system of cars made a briefintroduction.Keywords :abs construction works of abs ;;failure to detect目录第一章:绪论1.1:选题背景及研究意义第二章:汽车ABS技术发展2.1::ABS的作用2.2:ABS技术的发展及应用现状2.3:ABS的发展趋势2.4:结论第三章:ABS的结构组成和工作原理3.1:ABS的结构组成3.2:ABS的工作原理3.3:ABS的分类第四章:典型ABS系统的车辆的介绍4.1奔驰YBL6120H型客车ABS基本结构与工作原理4.2一汽捷达轿车ABS结构原理第五章:汽车ABS常见故障及分析5.1:.ABS故障诊断仪器和工具5,2:.故障诊断与排除的一般步骤5.3:常见故障及分析第六章:ABS系统的实例故障分析6.1本田雅阁ABS常见故障分析6.2奇瑞A516 ABS故障警告灯点亮且异常频繁工作的故障分析参考文献致谢第一章绪论1.1选题背景及研究意义ABS”(Anti-lockedBrakingSystem)中文译为“防抱死刹车系统”.它是一种具有防滑、防锁死等优点的汽车安全控制系统。
《控制理论CAI教程》答案

(s)
=
1 C2s
I
(s)
Uo (s) = R2I (s) + Uc2 (s)
1 Uc2(s) Uo(s)
C2 s
R2
第二章 控制系统的数学模型
Uc1(s) R1
R1C1s +1
-
1 I(s)
-
Ls + R2
1 Uc2(s)
C2 s
R2
Ui(s) 1
− R1 R1C1s +1 1 Ls + R2
R2
第三章 控制系统的时域分析法
3-3 s(τs+1)(2s+1)+K(s+1)=0
2τs3+(2+τ)s2+(1+K)s+K=0
s3 2τ
1+K
s2 2+τ K
s1 (2+τ)(1+K) -2τK
s0 K
2τ>0
K>0 (2+τ)(1+K) -2τK>0
第三章 控制系统的时域分析法
τ
τ>0
(1-K) τ+2(K+1)>0
特征多项式:s3 +as2 +bs+d =0
设另一极点为e(e<5),则特征多项式:(s+e)(s2+2s+2)
第三章 控制系统的时域分析法
二阶系统,R(s)=1/s,σp=0.2,ts=1.8s 时,试确定K1、τ值。 当输入信号分别为: r(t)=1(t),r(t)=t,r(t)=1/2t2时,
Uo (s) = P1Δ1 + P2Δ2
Ui (s)
第四章 微电网运行与控制技术
4.1 微电网自动控制结构与体系
4.1.1 微电网的经典结构与控制目标 1、经典微电网的基本结构 如图4.1所示,它由微电源、储能装置和电/热 负荷构成,并联在低压配电网中。微电源接入 负荷附近,很大的减少了线路损耗,增强了重 要负荷抵御来自主电网故障的影响的能力。微 电源具有“即插即用”的特性,通过电力电子 接口实现并网运行和孤岛运行方式下的控制、 测量和保护功能,这些功能有助于实现微电网 两种运行方式间的无缝切换。
P
Q
ref
u d id u q iq u d id
u d id u q iq u d id
(4-1)
ref
通过式(4-1)计算得到dq轴的电流值,把它 作为电流环参考值,与实际的电流值做差, 然后通过PI控制器。得到滤波电感参数后,设 置dq轴电压参考分量,通过Park反变换,得 到三相交流分量,通过PWM输出给逆变器。
如图4.4所示Droop控制有功-频率(P-f)和 无功-电压(Q-U)呈线性关系,当微电源输 出有功、无功增加时,运行点由A点移动到 B点,达到一个新的稳定运行状态,该控制 方法不需要各微源之间通信联系就可以实 施控制,所以一般采取对微电源接口逆变 器控制。
图4.4 频率、电压下垂特性
4.2 微电网的逆变器控制
在大电网发生故障或其电能质量不符合标准情 况时,微电网可以孤网运行,保证微电网自身 和大电网的正常运行,从而提高供电安全性和 可靠性。因此孤网运行时微电网最重要的能力, 而实现这一性能的关键技术是微电网与主电网 之间的电力电子接口处的控制环节—静态开关。 该静态开关可实现在接口处灵活控制的接受和 输送电能。从大电网的角度看,微电网相当于 负荷,是一个可控的整体单元。另一方面,对 用户来说,微电网是一个独立自治的电力系统, 它可以满足不同用户对电能质量和可靠性的要 求。
《现代控制理论》第3版(刘豹唐万生)课后习题答案
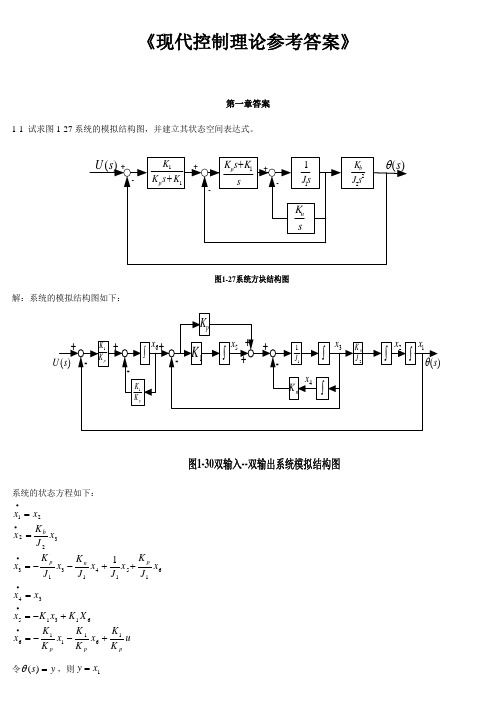
《现代控制理论参考答案》第一章答案1-1 试求图1-27系统的模拟结构图,并建立其状态空间表达式。
11K s K K p +sK s K p 1+s J 11sK n 22s J K b -++-+-)(s θ)(s U 图1-27系统方块结构图解:系统的模拟结构图如下:)(s U )(s θ---+++图1-30双输入--双输出系统模拟结构图1K pK K 1pK K 1+++pK n K ⎰⎰⎰11J ⎰2J K b ⎰⎰-1x 2x 3x 4x 5x 6x系统的状态方程如下:u K K x K K x K K x X K x K x x x x J K x J x J K x J K x x J K x x x pp p p n pb1611166131534615141313322211+--=+-==++--===∙∙∙∙∙∙令y s =)(θ,则1x y =所以,系统的状态空间表达式及输出方程表达式为[]⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡-----=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡∙∙∙∙∙∙654321165432111111112654321000001000000000000010010000000000010x x x x x x y uK K x x x x x x K K K K K K J K J J K J K J K x x x x x x p p pp n p b1-2有电路如图1-28所示。
以电压)(t u 为输入量,求以电感中的电流和电容上的电压作为状态变量的状态方程,和以电阻2R 上的电压作为输出量的输出方程。
R1L1R2L2CU---------Uc---------i1i2图1-28 电路图解:由图,令32211,,x u x i x i c ===,输出量22x R y =有电路原理可知:∙∙∙+==+=++3213222231111x C x x x x R x L ux x L x R 既得22213322222131111111111x R y x C x C x x L x L R x u L x L x L R x =+-=+-=+--=∙∙∙写成矢量矩阵形式为:[]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎣⎡----=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡32121321222111321000*********x x x R y u L x x x CCL L R L L R x x x 。
重庆08定额计价规范

重庆08定额计价规范篇一:重庆08定额完整版总说明一、《重庆市建筑工程计价定额》(以下简称本定额)是根据建设部颁布的1995年《全国统一建筑工程基础定额》(GJD-101-95)、1999年《全国统一建筑工程基础定额重庆市基价表》、2003年《重庆市建筑工程消耗量定额》(CQXHL-201-2003)、现行有关设计规范、施工验收规范、质量评定标准、国家产品标准、安全操作规程并参考了行业、地方标准以及有代表性的工程设计、施工资料、其他资料等依据和相关规定,结合本市实际情况进行编制的。
二、本定额适用于本市行政区域内新建、扩建、改建的工业与民用建筑工程。
三、本定额是编制和审核工程预算、工程标底、最高限价、工程结算的依据;是编制企业定额、投标报价和工程量清单综合单价的参考依据;也是编制概算定额和建设工程投资估算指标的基础。
四、本定额是按照正常的施工条件,目前多数建筑企业的施工机械装备程度,合理的施工工期、施工工艺、劳动组织为基础编制的,反映了社会平均人工、材料、机械消耗水平。
本定额中的人工、材料、机械消耗量除规定允许调整外,均不得调整。
五、本定额用工不分工种、技术等级,以综合工日表示。
内容包括:基本用工、超运距用工、人工幅度差、辅助用工。
人工单价分别为:土石方用工22.00元/工日,机械操作用工28.00元/工日,其他用工25.00元/工日。
人工单价包括基本工资、工资性补贴、辅助工资、职工福利费和劳动保护费。
六、本定额材料消耗已包括施工中消耗的主要材料、辅助材料和零星材料,辅助材料和零星材料合并为其他材料费。
本定额人工、材料、成品、半成品和机械燃(油)料价格,是以定额编制期的价格为依据确定的基价,作为计取费用的基础,其价差可参照重庆市建设工程造价管理机构发布的工程所在地的信息价格或市场价格进行调整。
七、本定额已包括材料、成品、半成品从工地仓库、现场堆放地点或现场加工地点至操作安装地点的水平运输以及运输损耗、施工操作损耗、施工现场堆放损耗。
滑模变结构控制课件.ppt

精品课件
⑤利用极点配置得到K,使得Ac的特征值之一为0 则可得:
hT Ac x xT AcT h xT h 0 s sgn(s) hT f (x,t)
⑥利用李雅普诺夫定理求出最后一个未知数η
V 1 s2 2
V ss
sgn(s)s shT f (x,t) | s | shT f (x,t) || h || || f (x,t) ||
点,如图中点B所示。
(3)终止点——状态点处在切换面上某点附近时,将从切换面的两 边中的一边趋向该点,切换面上这样的点就称做作止点,如图中点
C所示。
s(x)>0
A
B
C
精品课件
s(x)<0
s(x)=0
在滑模变结构中,通常点和起止点无多大意义,但终
止点却有特殊的含义。若切换面上某一区域内所有点都
是止点,则一旦状态点趋近该区域,就会被“吸引”到
精品课件
抖振问题的削弱方法
1. 准滑动模态方法(系统运动轨迹被限制在边界层) 采用饱和函数代替切换函数,即在边界层外采用正常的滑 模控制,在边界层内为连续状态的反馈控制,有效地避免 或削弱了抖振。 2. 趋近律方法(保证动态品质、减弱控制信号抖振) 3.滤波方法(通过采用滤波器,对控制信号进行平滑滤波) 3. 观测器方法(补偿不确定项和外界干扰) 4. 动态滑模方法 5. 智能控制方法
滑模变结构控制方法
20世纪50年代: 前苏联学者Utkin和Emelyanov提出了变结构控制的概念,研究对象:二阶线性系统。 20世纪60年代: 研究对象:高阶线性单输入单输出系统。主要讨论高阶线性系统在线性切换函数下控制受限与不受限及二次型切换函数的情况。 1977年: Utkin发表一篇有关变结构控制方面的综述论文,系统提出变结构控制VSC和滑模控制SMC的方法。同时,在1992年详细讨论了滑模技术。
正常运动段:位于切换面之外, 如图的 段所示。
滑模变结构控制的整个控制过程由两部分组成:
滑模变结构控制的品质取决于这两段运动的品质。由于尚不能一次性地改善整个运动过程品质,因而要求选择控制律使正常运动段的品质得到提高。 选择切换函数使滑动模态运动段的品质改善。两段运动各自具有自己的高品质。 选择控制律 :使正常运动段的品质得到提高。 选择切换函数 : 使滑动模态运动段的品质改善。
滑模变结构控制发展历史
此后 各国学者开始研究多维滑模变结构控制系统,由规范空间扩展到了更一般的状态空间中。 我国学者贡献: 高为炳院士等首先提出趋近律的概念,首次提出了自由递阶的概念。 海洋运载器方面的应用: Yoerger and Slotine (1985), Slotine and Li(1991), Healey and Lienard (1993) and Mc Gookin et al. (2000a, 2000b)
定义1:系统结构 系统的一种结构为系统的一种模型,即由某一组数学方程描述的模型。系统有几种不同的结构,就是说它有几种(组)不同数学表达式表达的模型。 定义2 :滑动模态 人为设定一经过平衡点的相轨迹,通过适当设计,系统状态点沿着此相轨迹渐近稳定到平衡点,或形象地称为滑向平衡点的一种运动,滑动模态的”滑动“二字即来源于此。
滑模变结构控制基本理论课件
图6 控制器u(t)局部轨迹
8
滑模变结构控制基本理论
例2 滑模观测器设计
系统模型如下同例1,但增加了一项故障项 fa (t)
x1 x2
x2
25x2
为状态变量,u为输入,y为输出,
fa (t)为未知非线性函数,代表故障。
设计任务:利用可测输入u和可测输出y对状态变量 x2 进行观测,对
滑模变结构控制基本理论
图9 故障及其重构值
图10 故障及其重构值局部图
滑模变结构控制基本理论
请大家指正
(CB)1[CAx ( sgn(s) ks)]
即 s 0, s 0,
u (t) (CB)1[CAx ks] u (t) (CB)1[CAx ks]
取
A
0 0
1 25
,
B
0 133
,C
c1
c2 15
1, 5, k 10
s Cx c1x1 x2 c1x1 x1
ui (x) ≠ ui (x)
(1) 存在滑动模态;
(2) 满足到达条件:即在切换面以外的相轨迹将于有限时间内到达
切换面;
(3) 滑模运动渐近稳定并具有良好的动态品质。
3
滑模变结构控制基本理论
滑模面设计:
滑模面的选取影响到变结构控制的性能, 线性结构的滑模面使系统处于滑动模态时, 稳定性分析简洁,参数设计容易,工程实现方便。
到达滑模面后: s 0,
c1x1 x1 0
x1(t) x1(0)ec1t
因为,c1 15 ,0所以上式收敛到零,且仅与c1有关,而与对象参数无关[不变性]。
6
滑模变结构控制基本理论
图1 滑模面运动相轨迹
图2 X1运动轨迹
第四章磁场定向控制(FOC)与直接转矩控制(DTC)
2.计算确定法 最简单的是对反电势进行积分,由电压方程可 得:
d m u1 (R 1 pL1l )i1 dt
(4-23)
也就是:
m (u1 (R 1 pL1l )i1 )dt
(4-24) (4-25)
m (u1 (R1 pL1l )i1 )dt
Lm L2 Lm L2
p 2 M 1 2 M
L
L L1 L2 m / L2
(4-17)
电机模型(2)
图4-2 MT坐标系下转子磁场定向控制的异步电机模型
说明:
转子的磁链只决定于定子电流的磁化分量iM1,而 电机的转矩只与转子磁链及定子电流的转矩分量 iT1有关。 (4-10)、(4-12)、(4-14) 在M轴的磁化分量和T轴上的转矩分量之间已解 耦且相互独立,因此,电机转矩的控制就可以通 过分别对定子电流在M、T轴上的分量的独立控 制来实现,其情况和直流电机完全相似。 但是若控制iM1使磁通保持恒定,则通过控制iT1可 以实现对转矩的瞬时控制,从而使异步电动机具 有如同直流电机那样的控制特性。
第四章 磁场定向 控制(FOC)与直接转矩控制(DTC)
4.1 4.2 4.3 4.4 4.5 4.6
矢量控制思想的提出 矢量控制的基本原理 异步电动机矢量控制的实现 转差矢量控制方法 直接转矩控制的原理 直接转矩控制的实现
4.1 矢量控制思想的提出 现代自动控制系统和机电一体化产品普遍要求动 作灵活、行动快速、定位精确,对传动、伺服系 统的动态特性有很高的要求。 任何一个机电传动、伺服系统,在工作中都要服 从运动的基本方程式:
将 i 2 与 i 2 代入上式有: 1 2 (L mi1 r T2 2 ) T2 p 1
上海交大杜秀华老师《现代控制理论》第四章 线性系统的结构分解6
• • 能控性和能观测性在线性非奇异变换下保持不变。 线性定常系统按能控性的结构分解
–
分解成能控的和不能控的两部分。如何分解?
1. 2. 3. 计算 从中任意选取k个线性无关的列 选取n-k个列控性分解的规范表达式
为什么?
Q q1 q k 变换关系 QA AQ QB B q k 1 q n A A的各列是AQ的各列关于Q q1 q k | q k 1 q n 的表达 Aq1 Aqk | Aqk 1 Aqn
1
q k 1 q n
q
qk
因rankQc rank[ B AB A n 1B] k 故Aq1 , , Aqk 对q1 q k | q k 1 q n 的表达中从第k 1行以下都为 0 即为规范表达式中的形 式 所以Aq1 , , Aqk都是q1 , , q k的线性组合
对B同理。
说明:
•线性定常系统按能观测性的分解
•线性定常系统结构的规范分解
不完全能控、不完全能观测的线性定常系统
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
自动化技术系列讲座第四讲主讲:苏宏业教授主讲第四章:变结构控制第四章变结构控制目录一、变结构控制理论的发展二、变结构控制的基本原理二变结构控制的基本原理三、变结构控制的应用第三部分:变结构控制一、变结构控制理论的发展工程实践对控制理论提出了更高的要求:复杂程度日渐增加,控制系控制对象的日渐增加统的非线性日益严重。
非线性系统的控制问题已经是现代控制理论界的研究题理论界的研究主题。
变结构控制理论是非线性系统控制问题的一个很好的理论、方法。
的个很好的理论方法W.S.Wunch1953年W.S.Wunch 的博士学位论文中出现了“改变系统结构”的思想诸多前苏联学者(V.A.Maslennikov 1956;G.M.Ostrovsky, 1956;A.M.Letov, 1957)将这M O t k1956A M L t1957一思想应用到控制系统中Emelyanov首先提出了变结构控制系统(Variable Structure Control Systems, VSCS)的概念,并且逐步形成了一个新的控制系统的综合方法合方法。
V.I.Utkin (1965、1977、1983)等在此基础上进步发展、完善变结构控制理论。
一步发展完善变结构控制理论Utkin在1977年详细总结了滑模变结构控制的原理及其发展。
到了八十年代中后期,线性系统的滑模变结构控制得到了充分的完善。
二、变结构控制的基本原理设二阶系统的微分方程为u x x x x x+−==122212&&14,0,4,0xs u x xs λλ+>⎧=−=⎨−<215.0x x s +=这是一个非线性系统。
利用相平面分析的方法,将相,⎩平面分成两个区域:1:0,x s >2:0x s <现在分析一下系统的相轨迹运动。
在没有到达直线s 之前,系统由两个线性的微分方程来描述,这个阶段,我们称之为系统的趋近模态。
在到达直线s 之后,我们发现,系统受直线方程s 的约束微分方程变为:约束,微分方程变为:05.011=+x x&注意观察就会发现,此时的运动方程阶数会比系统原来的阶数降低了。
这是变结构控制的特有性质。
我们把相轨迹到达了直线s ,受其约束下的运动阶段,称之为系统的滑动模态。
由于直线方程约束下的系统微分方程是稳定的所以系由于直线方程约束下的系统微分方程是稳定的,所以系统到达滑动模态后,也一定是稳定的。
这就是变结构控制的核心制的核心。
但是,要保证系统状态的相轨线运动到切换线s,是需要一定的条件的。
即设计的切换线s满足:<s s&才能保证状态运动到达s, 我们称这个条件为到达条件。
在连续系统中,所有类型的到达条件的本质,都是满足上式的特例。
达条件的本质都是满足上式的特例以上的分析中,切换线s是事先指定的,控制u是要根据需要来构造的。
变控制作为非线性控制的要综合方法,有 变结构控制作为非线性控制的主要综合方法,有以下特点:变结构控制是一种综合方法它的设计具有变结构控制是种综合方法,它的设计具有分离性。
即可以事先设计切换线s,或者是滑动模态,然后根据稳定性,或者其他的需要,来构造控制u。
变结构系统在进入滑动模态之后,对系统的摄动和外来干扰具有完全的自适应性。
摄动和外来干扰具有完全的自适应性变结构控制是依靠控制器的切换来保证它的优良性能的,由此,也带来了它的负面影响,就是控制器带有大量的抖振。
三、变结构控制的应用最初的应用只出现在简单的继电器系统中1977年,V.I.Utkin列举出几个出现的实际程应用,比如个水电站的变结构控制系工程应用,比如一个水电站的变结构控制系统和一个飞行器的变结构控制。
现代应用现代应用:机器人控制飞行器、飞机姿态控制问题电液伺服系统控制倒立摆系统结构局部线性化模型⎥⎤⎢⎡−+⎥⎤⎢⎡−+⎥⎤⎢⎡−−=−−−×E F L F G F H F I X ~0~~0~~~~011144U X &⎦⎣⎦⎣⎦⎣T xx ][321321θθθθθθ&&&&=∗X ⎡⎤⎡⎥⎥⎥⎤⎢⎢⎢=18171031110924321A A A A A A A A A A A A ~F ⎥⎥⎥⎢⎢⎢=23212014125A A A 00A A 0000A ~G ⎥⎦⎢⎣2518114A A A A ⎥⎦⎢⎣2928A A 0⎤⎡0000⎥⎤⎢⎡s K ⎥⎥⎥⎥⎢⎢⎢⎢=2416A 000A 0000A 0~H ⎥⎥⎥⎦⎢⎢⎢⎣=000~L ⎦⎣30倒立摆滑模控制器的设计z滑模面的设计S T=CX通过选择适当的向量C使得系统在滑模面上运动时达到所期望的动态特性z趋近律的选择&kSε=sgn−S−S通过选择适当的,来保证系统在趋近滑模面运动时品质kε单级倒立摆基于滑模的自举控制的自举单级倒立摆稳态响应曲线0.0001单级倒立摆稳态响应曲线单级倒立摆稳态响应曲线单级倒立摆实验演示多级倒立摆的滑模变结构控制双摆控制响应曲线双摆控制响应曲线双摆控制响应曲线双摆控制响应曲线双摆实验演示二级倒立摆控制响应曲线二级倒立摆控制响应曲线二级倒立摆控制响应曲线二级倒立摆控制响应曲线二级倒立摆实验演示三级倒立摆控制响应曲线三级倒立摆控制响应曲线三级倒立摆控制响应曲线三级倒立摆控制响应曲线三级倒立摆控制响应曲线三级倒立摆实验演示第四部分:容错控制、什么是容错控制系统一、二、故障的分类和故障诊断三、容错控制方法的分类一、什么是容错控制系统随着控制理论与计算机技术的迅速发展 对控制系统安全和可靠性运行的要求亦向控制界提出了新的命题。
基于“功能冗余”的 基于功能冗余的容错控制是在鲁棒控制和自适应控制基础上出现的一类新型的控制技术容错控制把控制系统的性能要求提高到对系统内部的统统某些故障具有容忍能力的程度 容错控制系统是一种高可靠性的、经济的和具有广泛应用前景的控制系统。
1971年B d博士首先研究基于“功能冗1971年Beard博士首先研究基于“功能冗余”的容错控制学者们针对各自应用背景,陆续开展了这类新型的容错控制的研究工作经过20多年的努力,无论是在理论上,还是在应用上,都取得了可喜的成果。
容错原是计算机系统设计技术的一个概念指系统虽然受到内部环节的局部故障或失效,但仍可继续正常运行的一种特性人们无法保证构成系统的各个环节的绝对可靠若把容错的概念引入到控制系统,从而构成,使系统中的各个故障因素对容错控制系统使系统中的各个故障因素对控制性能的影响被显著削弱从而意味着间接地提高了控制系统的可靠性 尤其当构成控制系统的各个部件的可靠度先验未知时,容错更是在系统设计阶段保证系统可靠性的主要途径。
统可靠性的主要途径控制系统是一类由被控对象、控制器、传感器、执行器乃至计算机等部件组成的复杂系统,而各个部件又是电子、机械、软件及其它因素的复合体。
个典型的是电子、机械、软件及其它因素的复合体。
一个典型的控制系统结构如图所示。
计控制器执行器对算机传感器象控制系统结构框图控制系统的各个基本组成环节都有可能发生故障 具体来讲,故障划分为三种类型:被控制对象故障,指对象的某一部分设备不,指对象的某部分设备不能完成原有的功能;仪表故障,包括传感器、执行器和计算机接口的故障;软件故障 ,指计算机诊断程序和控制程序发生故障。
系统的可靠性还在很大程度上取决于系统的结构、控制方案、对系统的性能要求系统的安装情况对系统的性能要求、系统的安装情况 环境对系统的扰动等。
提高控制系统可靠性有两种途径:(1)硬件冗余,(2)基于“功能冗余”的容错控制硬件冗余技(1)硬件冗余技术设置各种备份元器件或组件合理地组织它们的工作方式对故障部分进行删除或自动更换个别故障不能影响整个系统的正常工作个别故障不能影响整个系统的正常工作。
对控制系统的各个环节如被控对象设备、传感器和执行器等都可用硬件冗余技术提高其可靠性。
等都可用硬件冗余技术提高其可靠性优点:原则上可用于对任何硬件环节失效的容错控制。
缺点:将使系统的重量、体积、投资和能耗等大大增加。
基于功能冗余的容错控制(2)基于“功能冗余”的容错控制系统中诸多部件间在功能上有重叠,其中一个部件的部分或全部功能可由别的部件的功能来代替。
特点:控制系统中所有部件在正常时都处于工作状态,为维护控制系统的性能作出贡献当某些部件失效时,其余完好部件部分或甚至全部地承担起故障部件所丧失的控制作用,以维持控制系统的性能在允许的范围内。
维持控制系统的性能在允许的范围内优点:不引入任何部件的备份,而是在常规的系统结构下通过建立控制系统的动态数学模型得到结构下,通过建立控制系统的动态数学模型,得到诸部件的“功能冗余”,进而通过控制器的设计实现在局部故障的容错。
容错控制为设计经济的和高可靠性的容错控制系统提供了一条崭新的途径。
统提供了条崭新的途径容错控制的定义:控制系统是容错控制系统,如果控制系统中的某些部件出现故障时,尽可能地利用“功能冗余”,使得控制系统仍能按原定性能指标或不丧失最基本的功能(如稳定性),而安全地完成控制任务。
由容错控制系统传感器、执行器、故障监测系统和容错控制器组成一般结构容错控制系统的般结构如下图所示:执行器被控对象故障信息提取传感器故障检测故障估计与隔离容错控制计算机容错控制系统结构框图故障监测系统能够对控制系统中的执行器、传感器和被控对象进行实时故障监测,并根据故障特性进行动态补偿或切换故障源容错控制器则根据故障监测系统所得到的故障特性作出相应的处理,这可能要对反馈控障特性作出相应的处理这能要对反馈控制的结构实时再组合(real-timereconfiguration),这种结构的重组可能简)这种结构的重组能简单到只从已计算的表中就可读出一组新的控制增益,也可能复杂到实时地再设计控制系统,保证系统在故障状态下仍能获得良好的控制效果。