伊之密注塑机汇川伺服驱动器调试最简洁的步骤
汇川伺服驱动器调试指导
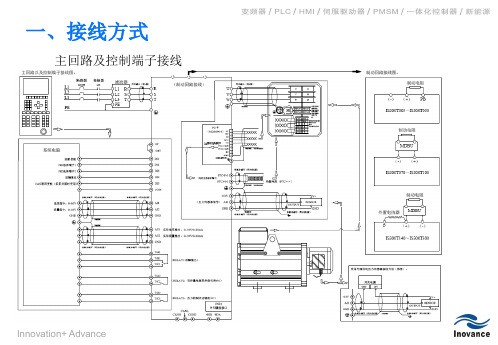
主回路及控制端子接线
Innovation+ Advance
一、接线方式
1)伺服驱动器主回路端子说明
Innovation+ Advance
一、接线方式
2)伺服配线注意事项:
a) 输入电源R、S、T: 伺服驱动器的输入侧接线,无相序要求。 b)直流母线(+)、(-)端子: 注意刚停电后直流母线(+)、(-)端子尚有残余电压,须等 CHARGE灯灭掉后并确认小于36V后方可接触,否则有触电的危险。 IS300T070(包含)以上选用外置制动组件时,注意(+)、(-) 极性不能接反,否则导致伺服驱动器损坏甚至火灾。 制动单元的配线长度不应超过10m。应使用双绞线或紧密双线并行配 线。 不可将制动电阻直接接在直流母线上,可能会引起伺服驱动器 损坏甚至火灾。 c)制动电阻连接端子(+)、PB: IS300T050(包含)以下且确认已经内置制动单元的机型,其制动电 阻连接端子才有效。 制动电阻选型参考推荐值且配线距离应小于5m。 否则可能导致伺服驱动器损坏。
Innovation+ Advance
三、调试步骤
注塑机伺服电机一般为八极电机故极对数为4 以额定转速为1500RPM电机为例,代入上述公式可得额定频 率为100Hz F1-05=? 电机额定转速 F1-15=? 电机电机反电势(若电机厂家的参数提供了电机反电势请 设置) 电机调谐(面板控制:F0-02=0) 静态调谐 (当已知电机反电势情况下,且电机已经联接油泵,不能打开安全 阀或者溢流阀使油泵抽出来的油直接回流油箱的情况下使用)
Innovation+ Advance
一、接线方式
3)PG卡脚位、编码器及配套信号线定义
信号定义
调试伺服电机的六大步骤及注意事项
调试伺服电机的六大步骤及注意事项伺服电机(servo motor )是指在伺服系统中控制机械元件运转的发动机,是一种补助马达间接变速装置。
伺服电机可使控制速度,位置精度非常准确,可以将电压信号转化为转矩和转速以驱动控制对象。
伺服电机转子转速受输入信号控制,并能快速反应,在自动控制系统中,用作执行元件,且具有机电时间常数小、线性度高、始动电压等特性,可把所收到的电信号转换成电动机轴上的角位移或角速度输出。
今天与大家分享的就是伺服电机的调试方法和注意事项。
伺服电机的调试方法伺服电机的注意事项1、伺服电机油和水的保护A:伺服电机可以用在会受水或油滴侵袭的场所,但是它不是全防水或防油的。
因此,伺服电机不应当放置或使用在水中或油侵的环境中。
B:如果伺服电机连接到一个减速齿轮,使用伺服电机时应当加油封,以防止减速齿轮的油进入伺服电机。
C:伺服电机的电缆不要浸没在油或水中。
2、伺服电机电缆→减轻应力A:确保电缆不因外部弯曲力或自身重量而受到力矩或垂直负荷,尤其是在电缆出口处或连接处。
B:在伺服电机移动的情况下,应把电缆(就是随电机配置的那根)牢固地固定到一个静止的部分(相对电机),并且应当用一个装在电缆支座里的附加电缆来延长它,这样弯曲应力可以减到最小。
C:电缆的弯头半径做到尽可能大。
3、伺服电机允许的轴端负载A:确保在安装和运转时加到伺服电机轴上的径向和轴向负载控制在每种型号的规定值以内。
B:在安装一个刚性联轴器时要格外小心,特别是过度的弯曲负载可能导致轴端和轴承的损坏或磨损。
C:最好用柔性联轴器,以便使径向负载低于允许值,此物是专为高机械强度的伺服电机设计的。
D:关于允许轴负载,请参阅“允许的轴负荷表”(使用说明书)。
4、伺服电机安装注意A:在安装/拆卸耦合部件到伺服电机轴端时,不要用锤子直接敲打轴端。
(锤子直接敲打轴端,伺服电机轴另一端的编码器要被敲坏)B:竭力使轴端对齐到最佳状态(对不好可能导致振动或轴承损坏)。
伺服电机的调试方法及操作规程

伺服电机的调试方法及操作规程伺服电机的调试方法1、初始化参数在接线之前,先初始化参数。
在掌控卡上:选好掌控方式;将PID参数清零;让掌控卡上电时默认使能信号关闭;将此状态保存,确保掌控卡再次上电时即为此状态。
在伺服电机上:设置掌控方式;设置使能由外部掌控;编码器信号输出的齿轮比;设置掌控信号与电机转速的比例关系。
一般来说,建议使伺服工作中的最大设计转速对应9V的掌控电压。
比如,山洋是设置1V电压对应的转速,出厂值为500,假如你只准备让电机在1000转以下工作,那么,将这个参数设置为111、2、接线将掌控卡断电,连接掌控卡与伺服之间的信号线。
以下的线是必需要接的:掌控卡的模拟量输出线、使能信号线、伺服输出的编码器信号线。
复查接线没有错误后,电机和掌控卡(以及PC)上电。
此时电机应当不动,而且可以用外力轻松转动,假如不是这样,检查使能信号的设置与接线。
用外力转动电机,检查掌控卡是否可以正确检测到电机位置的变化,否则检查编码器信号的接线和设置。
3、试方向对于一个闭环掌控系统,假如反馈信号的方向不正确,后果确定是祸害性的。
通过掌控卡打开伺服的使能信号。
这是伺服应当以一个较低的速度转动,这就是传说中的“零漂”。
一般掌控卡上都会有抑制零漂的指令或参数。
使用这个指令或参数,看电机的转速和方向是否可以通过这个指令(参数)掌控。
假如不能掌控,检查模拟量接线及掌控方式的参数设置。
确认给出正数,电机正转,编码器计数加添;给出负数,电机反转转,编码器计数减小。
假如电机带有负载,行程有限,不要接受这种方式。
测试不要给过大的电压,建议在1V以下。
假如方向不一致,可以修改掌控卡或电机上的参数,使其一致。
4、抑制零漂在闭环掌控过程中,零漂的存在会对掌控效果有确定的影响,建议将其抑制住。
使用掌控卡或伺服上抑制零飘的参数,认真调整,使电机的转速趋近于零。
由于零漂本身也有确定的随机性,所以,不必要求电机转速确定为零。
5、建立闭环掌控再次通过掌控卡将伺服使能信号放开,在掌控卡上输入一个较小的比例增益,至于多大算较小,这只能凭感觉了,假照实在不放心,就输入掌控卡能允许的最小值。
汇川伺服驱动设置

汇川伺服驱动设置
汇川伺服驱动器设置
控制面板按键介绍
伺服驱动器断使能。
(1)伺服驱动器恢复出厂设置。
H02-31设置为1,然后断电重启驱动器。
(2)伺服驱动器脉冲指令形式设置为CW+CCW。
伺服电机H05-15设置为3,设置完之后断电重启驱动器。
(3)在使用有刹车的伺服电机时需将H0408的值设为9,然后断电重启。
(4)常见问题参数调整:
a.伺服使能之后,电机噪音比较大。
解决方法:软件控制电机转动,然后把H0902参数改为1,加入限波器,写入参数。
H0902参数一定是在运行状态下写入才会有效。
b.伺服使能之后,来回晃动。
解决方法:适量增大H0800、H0802和H0815参数。
c.H0517参数不能通过软件来设置,必须在控制面板中设置。
d.H0502和H0517需要同比例变化。
例如H0502由10000设为
60000,则H0517需要由2500设置为15000。
e.若电机运行卡顿,先在功能码H0D02中自动识别惯量比,按上
下键电机运动,当惯量比值稳定长摁set键1s读入惯量比,然后在H0901中根据具体运行情况调整刚性。
汇川驱动器参数简易设置

进入设置界面:
电机面板键盘:
MODE退出和进入代码页面
SET确定
示例:进入H0502
MODE-按一下-在按一下-进入H00-调节上下键-H05-按SET键-进入三四位的输入-上下键-H0502-SET-保存
在使能(驱动器显示RUN)状态下,不能更改参数,需要断开使能才能更改参数。
设置参数:
H0231初始化设置为1断电重启(先初始化后,再设置其他参数)
H0310伺服使能需要修改参数设置为0,重新上电后再修改参数,
修改完参数后,再改为1保存
H0311上电使能0或者1默认是0一般不做修改
H0502脉冲默认是0(设置为5000或者10000)
H0202方向默认是0(如果软件方向和实际运动方向相反,改为相反的值(1))
H0815惯量默认1
H0900刚性启用设为1(要更改刚性,先将H0900设置为1,刚性参数H0901的设置
才会有效)
H0901设置刚性默认12(如果需要改刚性,一个单位一个单位慢慢加,不能一次增加过多)
H0406故障报警代码
H0407故障报警输出电平状态(默认是0),按实际情况修改
刹车:(Z轴一定要设置刹车)
H0408改为9
H04090或者1(高低电平)默认为0,一般不做修改
注意:改完后如果报Er.941,需断电再次重新上电。
报错:
Er.120驱动器和电机型号不匹配
Er.234飞车(出现轴不受控制往一个方向运动)
rdy未使能
Er.630电机堵转
Er.941需要重新上电,修改的参数才有效。
汇川伺服调试诀窍

汇川伺服调试诀窍一、面板应用简介(1)面板按钮介绍:菜单键、加、减、移位、确认键(2)面板状态:一般上电是rdy状态,若DI5伺服使能端子导通,则显示RUN 状态(3)参数设置:参数设置注意事项:1. 许多参数运行中不能设置,但是DI5使能端子可能上电就导通,这时候面板显示run状态,像参数方向H02-02、脉冲选择H05-01、H02-31恢复出厂设置、H0D-11点动、H0D-02惯量辨识都不能设置,必须是rdy状态,这时候需要去掉使能。
2. 去掉使能三种方法:比如若要修改方向,则要先要去掉使能(1)H0D-05改为1,修改方向,然后将H0D-05改为0,断电重启;(1)H0310改为0,断电重启,面板显示rdy,则可以更改方向,更改完以后再将H03-10设置为1,断电重启;(3)断电拆下CN1端子,上电,修改方向H02-02,再断电,接好CN1端子上电;二、常用参数设置目前主要用到的功能:脉冲信号端子(低速还是高速),DI输入端子(D11正向限位开关、DI2反向限位开关、DI5伺服使能),DO 输出端子(DO1抱闸输出、DO4故障输出)许多参数都是默认值,不需要设置,部分参数要根据电机是否抱闸,是PLC还是板卡控制来根据实际应用设置。
调试注意事项:1、惯量辨识:H08-15的设置,可进行惯量辨识,伺服rdy状态,H0D-02,显示的值是H08-15的值,长按UP/DOWN键,伺服运动,显示的值稳定,长按SET键保存;目前一般值设置5左右2、点动:rdy状态(去掉使能),HOD-11,set键,显示初始速度,UP/DOWN键,修改速度,建议开始速度设置较低为20左右,然后SET键,JOG模式,然后UP/DOWN键点动;若有声音或者抖动:1、降低H09-01刚性的值,一般皮带12左右,丝杆14左右,若仍然有声音可以加转矩滤波时间常数,将H09-00设置为0,然后将H07-05=1.5,H07-06=1.5;2、若停机时,明显很快停机,抖停,增加上位机发送脉冲的加减速时间或者减小加减速速度;三、CN1接线(1)若使用高速端子(H05-01设置为1),则脉冲接线端子为HPULSE-(36)、HPULSE+(38)、HSIGN-(40)、HSIGN+(42);(2)若使用低速端子(H05-01设置为0),则脉冲接线端子为PULSE-(43)、PULSE+(41)、SIGN-(39)、SIGN+(37);四、常见报警五、常用监控参数1、H0B-00,监控电机反馈的速度,可以方便查看电机是否旋转,具体转速;2、H0B-03,可以监控DI端子是否真的导通,比如若上电伺服没有使能,显示rdy状态,这时就可以看DI5是否是低电平,若是低电平,说明DI5使能端子已经导通,应该使能,DI5端子接线没有问题,若是高电平,说明DI5没有导通;3、H0B-05,可以监控DO状态,比如DO1用了抱闸输出这个功能,若使能的情况下,抱闸应该松开,若仍然抱住,就可以通过看H0B-05的高低电平来判断DO输出是否正常,使能情况下,理论上D01应该是低电平;4、H0B-07是反应当前电机位置(指令单位),可以用来判断编码器是否正常,旋转电机后,值的变化;5、H0B-13是上位机发送的脉冲数,可以检验是否丢脉冲或者是否接收到上位机的脉冲数;6、H0B-33,H0B-34可以查看过去电机的故障记录;六、常见的遇到问题解决方法1、伺服面板上电显示rdy(因为华工目前应用DI5使能端子,上电就导通),面板应该显示run状态,有哪些可能原因?可以通过如何去掉使能来反推(急停H0D-05、H03-10,CN1)(1)HOB-03,从右往左,第五个竖线应该是在下边,低电平导通;低电平说明DI5导通,正常;高电平说明没有导通,检查接线;(2)检查H0D-05,正常应该是0;若是1改为0,表明急停去掉使能了;(3)H03-10是否为1,H03-11是否为0;2、如何检查限位开关是否有作用?正负限位是否接反?挡住理论上的正向限位开关,伺服应该报ER950,;挡住理论上的负向限位开关,伺服应该报ER952;可以通过H0B-03查看对应的DI1、DI2端子是否有变化,从而检查限位开关是否有用;若没有挡住就报错,说明对应的高低电平设置错误;3、发送脉冲,伺服没有运行?(1)检查伺服是否报错,面板是否显示run状态;(2)检查限位开关是否接颠倒,因为是双重限位,不仅要检查伺服,还要检查接到PLC或者控制板卡的限位信号;(3)H05-01选择的脉冲端子是否正确,若是PLC,因为是集电极,所以H05-01为0,若是控制板卡控制,则是差分,检查是否是高速端子,若高速则H05-01应该设置为1;(3)H0B-13监控PLC发送的脉冲数,是否变化,伺服是否收到PLC发送的脉冲数;(4)一般不只一个轴,可以将CN1端子,与其他正常轴颠倒一下(这个正常轴的限位开关不要挡住),用正常轴发送脉冲来控制本轴,看此轴是否可以正常运行;若可以正常运行,说明可能是CN1接线或者控制板卡(或PLC接口)有问题,若仍然不能正常运行,可能是伺服参数设置或者CN1这边接口有问题;4、对于伺服报错,根据故障代码排查步骤仍然解决不了的,可以交叉互换相关的线缆、驱动器或者电机,快速定位问题范围;更详细资料可以到汇川官网-服务与支持-资料下载页面参考《IS620P系列伺服设计维护手册》。
汇川驱动器参数简易设置

进入设置界面:
电机面板键盘:
MODE退出和进入代码页面
SET确定
示例:进入H0502
MODE-按一下-在按一下-进入H00-调节上下键-H05-按SET键-进入三四位的输入-上下键-H0502-SET-保存
在使能(驱动器显示RUN)状态下,不能更改参数,需要断开使能才能更改参数。
设置参数:
H0231初始化设置为1断电重启(先初始化后,再设置其他参数)
H0310伺服使能需要修改参数设置为0,重新上电后再修改参数,
修改完参数后,再改为1保存
H0311上电使能0或者1默认是0一般不做修改
H0502脉冲默认是0(设置为5000或者10000)
H0202方向默认是0(如果软件方向和实际运动方向相反,改为相反的值(1))
H0815惯量默认1
H0900刚性启用设为1(要更改刚性,先将H0900设置为1,刚性参数H0901的设置
才会有效)
H0901设置刚性默认12(如果需要改刚性,一个单位一个单位慢慢加,不能一次增加过多)
H0406故障报警代码
H0407故障报警输出电平状态(默认是0),按实际情况修改
刹车:(Z轴一定要设置刹车)
H0408改为9
H04090或者1(高低电平)默认为0,一般不做修改
注意:改完后如果报Er.941,需断电再次重新上电。
报错:
Er.120驱动器和电机型号不匹配
Er.234飞车(出现轴不受控制往一个方向运动)
rdy未使能
Er.630电机堵转
Er.941需要重新上电,修改的参数才有效。
汇川伺服调试

一、伺服配线
3、汇川伺服控制线:说明书60页。 位置控制最简单的接线方式:
7----------------3
8----------------Y0 11--------------13
12--------------Y1
50--------------COM (如下页接线) 其他DI和DO根据实际需要选配。
H05-06
H07-05 H08-00 H08-01 H08-02 H08-15
Innovation+ Advance
50.0
0.79 35 31.00 50.0 6.90
位置指令移动平均时间
转矩滤波时间 速度环增益 速度环积分时间参数 位置环增益 负载转动惯量比
我们与合作伙伴一道,共创美好未来
Innovation+ Advance
Innovation+ Advance
一、伺服配线
5、动力线、编码线接线对应表:
a.伺服驱动器——伺服电机之间的主回路线:制作焊接线号—颜色对应表 电机端主回路线:颜色 驱动器主回路:标识 蓝色 U 黑色 V 红色 W 黄绿色 PE
b.伺服驱动器——伺服电机之间的编码线:制作焊接线号—颜色对应表
信号 A+ AB+ BZ+ Z+5V GND 屏蔽线
Innovation+ Advance
通信口
CN1控制端子
CN2编码器端子
一、伺服配线
2、汇川伺服控制信号:说明书63页。 CN1-50针的控制信号硬件分配,
包含了10个DI输入口、
3个AI输入口、 7个DO输出、
1个公共点、